输电线路人机协同立体巡检系统设计
2022-06-07 02:12卞蓓蕾
浙江电力 2022年5期
卞蓓蕾,江 炯,刘 鹏
(国网浙江省电力有限公司宁波供电公司,浙江 宁波 315100)
0 引言
中国长距离输电线路众多,基层巡检作业负担重、运检成本较高。近年来电网输电(电缆)线路规模增长迅速,以宁波市为例,高压电缆近3年的年均增长率达到12.17%,架空线路近3 年的年均增长率达到5.2%。多回密集通道显著增加,存在通道“1-N”风险和线路“N-1”风险。传统的输电线路人工巡检运行方式已不能满足电网安全工作要求。
随着“大云物移智”新技术迭代更新,360°高清可变焦监控装置、高清夜视装置、输电线路专用巡检无人机、架空地线巡检机器人、特殊车辆北斗定位装置、振动感应地钉、移动巡检终端等高端装备大量配置到人员和现场,机器代人已成为未来巡检必然趋势。在此基础上,电网公司对无人机自动巡检系统、移动巡检工作模式等进行了大量研究,取得了较大进展,很多单位在无人机自动化巡检应用、电缆隧道综合监控、图像识别缺陷诊断、手持终端巡检装置使用等方面进行了广泛探索,但在一线班组实际应用过程中,仍然存在着如下需要解决的难题[1-5]:
1)新装备配置过程中,机器巡检质量良莠不齐,且版本迭代频繁,常因机器巡检质量不高,一线班组机巡、人巡同时开展,增加了运检成本,亟需建立实操环境下的机器巡检质量评估与测试模型[6]。
2)实际工作中,新装备配置种类、数量不同,对巡检区域、巡检项目覆盖率不同,一线班组人机协同策略较为复杂,往往需要安排专人进行管理,亟需建立统一管理后台,通过典型场景建设,形成自动任务派发计算模型[7-8]。
3)大量新装备配置后,一方面极大方便了数据采集,丰富了数据来源,另一方面也对原有的输电设备管理机制带来了冲击,同时新装备本身的健康状态管理也成为必须解决的问题,亟需建立状态评估与跟踪模型[9-11]。
本文梳理输电、电缆线路及通道的各类新装备,在宁波部分区域建设实践示范区,建立实验验证算法,构建统一管理后台,设计基于人机协同的输电线路立体巡检系统,解决了上述问题。
1 总体架构
输电线路立体巡检系统尝试通过深化前端感知设备数据交互、智能联动,进行辅助状态研判、巡检策略智能生成,探索实现输电线路数字化运检。系统整体遵从感知层、网络层、平台层、应用层的基础结构,感知层采集人工巡检、无人机终端巡检、前端在线装置监测数据等通过网络层传输至数据池,在平台层经过数据可信度评估、应用场景分析、巡检策略优化等形成巡检策略,传达至应用层,用于无人机巡检计划执行、在线监测采集周期调整、人工巡检任务派单等。此系统在硬件设计上,与现行研究差异不大,本文研究重点为平台层工作逻辑建设,即关键模型设计与验证。
输电线路立体巡检系统平台层包含两种工作模式,如图1所示,模式一为前端感知装置可信度测试模式,定期采集分析前端感知层装置数据,通过预设模型开展装置可信度评估,是立体巡检系统工作基础。模式二为巡检工作生产管理模式,在前端装置数据采集基础上,通过典型工作场景判定,制定并下达人工巡视任务、无人机巡检周期、在线监测装置采集及投退策略。
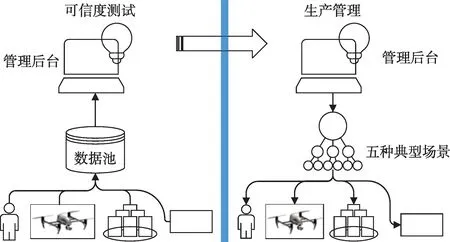
图1 输电线路立体巡检系统平台层工作模式
2 感知层装置可信度评估模型
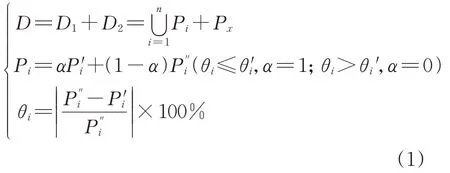
平台层以半年为周期,开展感知层装置可信度校验。围绕输电线路、通道巡检项目,建立前端感知装置与人工巡检数据池,采集数据形成数据集D1、人工巡检数据形成数据集D2、立体巡检感知层数据集D、有效数据Dval,D=D1+D2。当Dval=D时,立体巡检效率最高,即人机协同效率最高,其取决于两个因素:一是D1与D2数据来源项目重合度,即机器代人程度;二是D1与D2数据结果一致性,即机器代人可靠性。
表1所示为部分巡检项目通过建立立体巡检示范区按项目开展数据统计验证。根据数据应用场景,设置可接受偏差度,当机器巡检与人工巡检结果偏差度低于要求值时,采用机巡数据,反之,采用人工巡检数据,即:
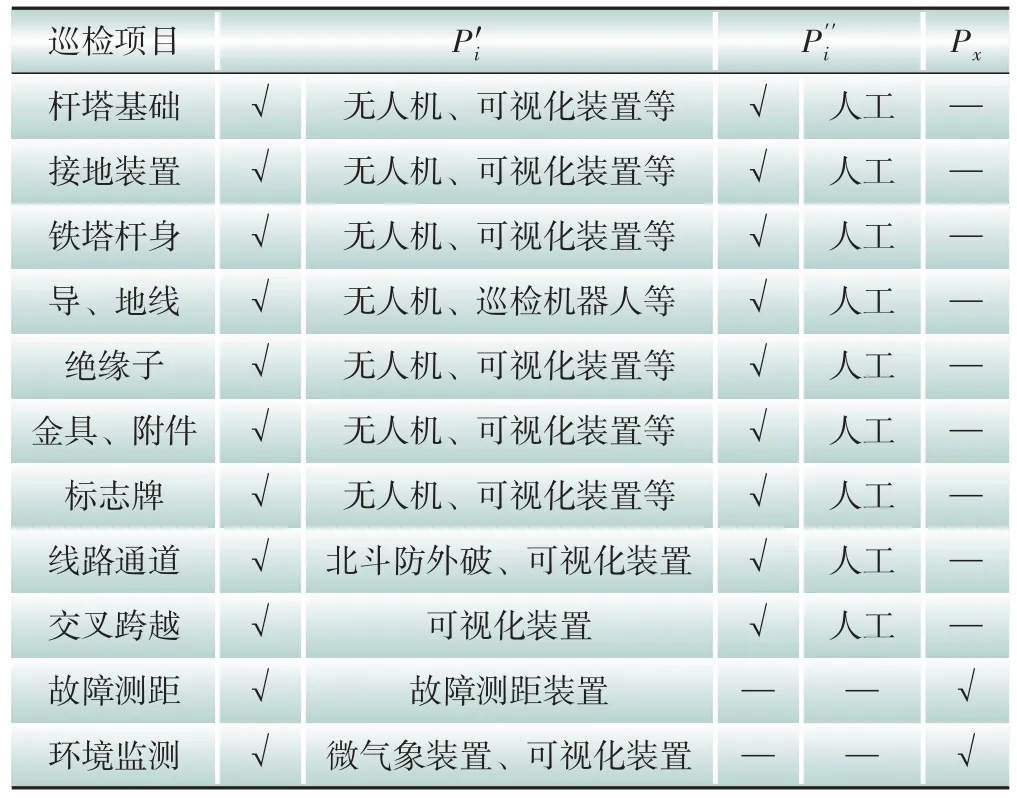
表1 输电线路巡检项目举例
式中:Px为人巡、机巡未重合项目;Pi为某人巡、机巡重合项目产生的数据;i为巡检项目编号;n为机巡、人巡重合项目总数量;和分别为该项目机巡、人巡产生的数据;θi为机巡与人巡偏差率;为设定的该项目可接受偏差率。
当和返回数据为数值型时,直接代入公式计算,例如红外测温所得值。当和返回数据为图像、视频等非数值型数据时,为人工巡视缺陷判断结果,则存在两种情况,一是图像识别与诊断技术成熟时,后台对缺陷判断结果;二是图像识别经人工辅助判断后返回的结果,在偏差率评估时,由专家组对和质量分别评分,进行计算。
1个月内,各项目机器巡视与人工巡视分别采集数据100次,统计结果如表2所示。
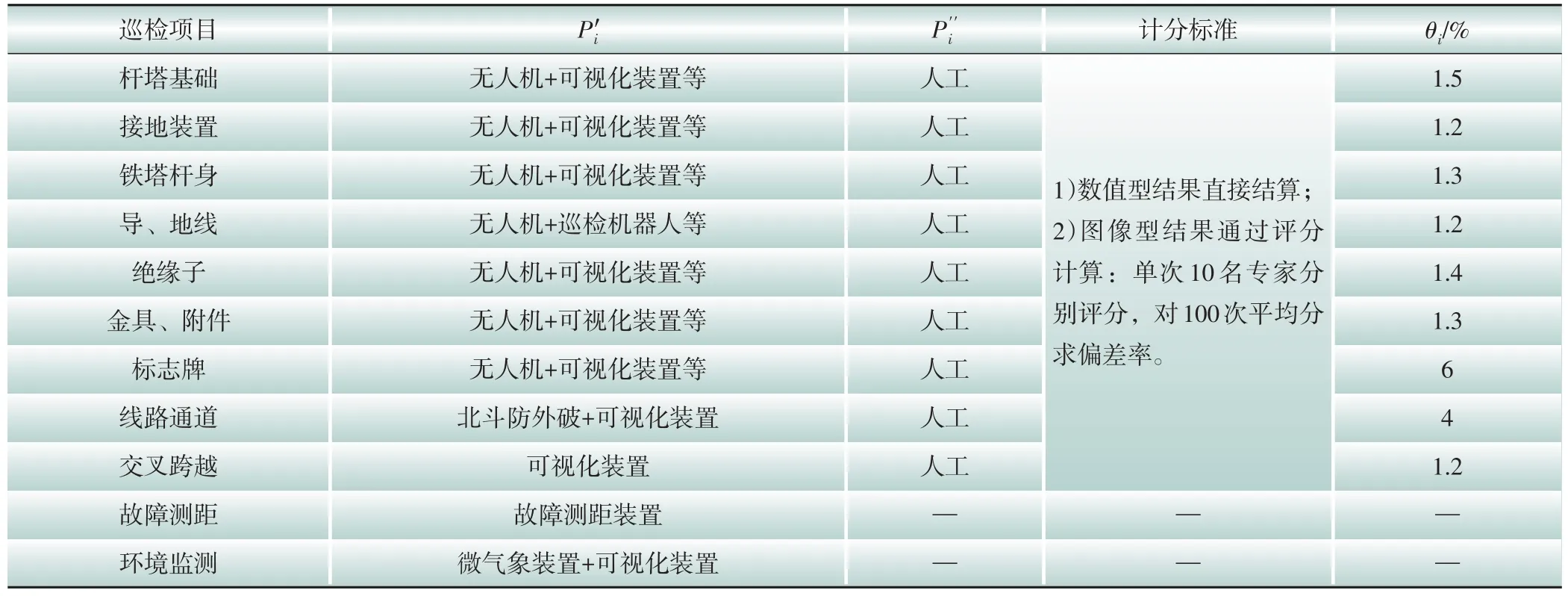
表2 巡检项目机巡、人巡偏差度评估
在实际使用中,可通过该方法对感知装置进行定期评估,根据对不同项目可接受偏差度要求,选择机巡或人巡策略。
3 立体巡检决策模型
3.1 立体巡检典型场景
感知层装置评估完成后,在平台层中设置五种典型巡检场景。根据不同场景要求,设置各巡检项目可接受偏差率,则人机协同最优巡检策略T由应用层管理后台作业计划模块派发至班组移动作业终端,机器巡检项目根据管理平台指令自行启动[12]。五种典型巡检场景如下:
1)常规巡检场景。根据常规巡检项目特点,设定可接受偏差率,见表3,结合基础策略、特殊区域维护、无人机禁飞区管理、电缆隧道(管廊)前端机器配置情况,生成人员、无人机、全景可视装置、隧道机器人协同巡检策略,根据巡检策略自动生成巡检年计划、月计划以及周计划,每半年根据式(1)开展一次偏差率校验,则:

式中:Tx为人巡、机巡未重合项目;n为机巡、人巡重合项目总数量。

巡检执行中,前端装置和人员执行已生成的巡检计划如图2所示,在计划生成后,无人机通过数据采集、数据处理、数据管理、数据应用进行巡检,人员、全景可视装置、隧道机器人等工作流程与无人机一致。
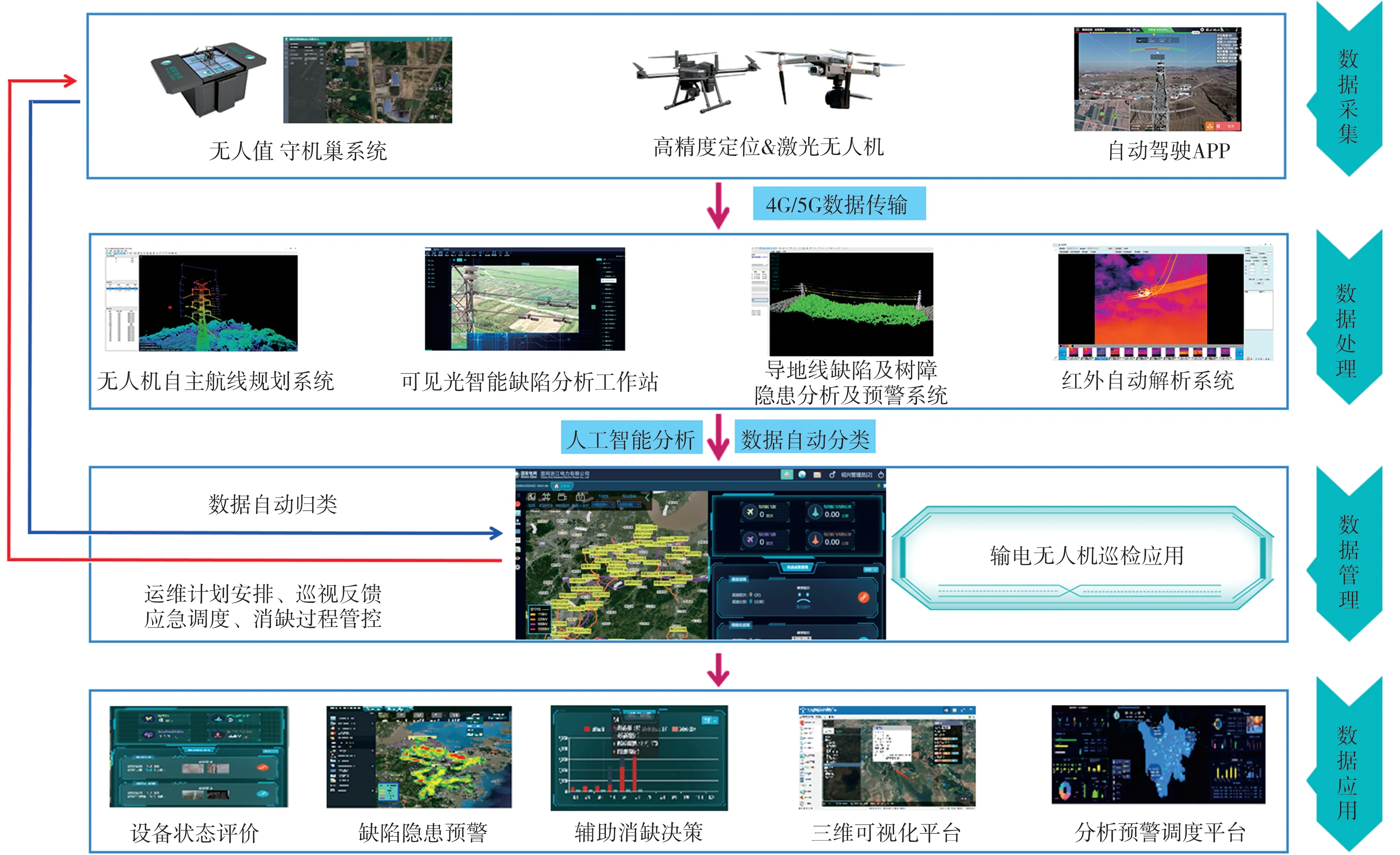
图2 前端装置工作示例——无人机终端巡检流程
2)跳闸处置场景。挑选机巡策略集合,通过分布式故障诊断装置,监控线路故障电流及波形,形成故障定位与雷电分析初判结果,在预叛故障区段执行特殊巡视策略,如表3所示,由应用层管理平台派发至机巡终端、人巡终端,特殊巡检项目根据设定顺序依次触发,即:

式中:m为跳闸处置场景下机巡策略集合中巡检项目数量。
3)灾害预警场景。接入覆冰预测与预报、台风预警监测两类监测数据,预警后启动特定巡检策略集合,如表3所示。覆冰预警时,进入实时监测状态,根据微气象数据、覆冰拉力数据、导线温度数据、图像监测、气象预报等分析72 h 预测覆冰厚度、覆冰环境持续时长、覆冰厚度估算、覆冰拉力增长率等数据,提供实时数据和图像支撑。台风预警时,通过分析台风气象信息、电网运行信息、在线监测、最新应急准备情况、台风影响与对应历史数据等大数据,预测分析台风对电网影响以及应急准备需求,开展抗台应急措施和力量调配[13],即:
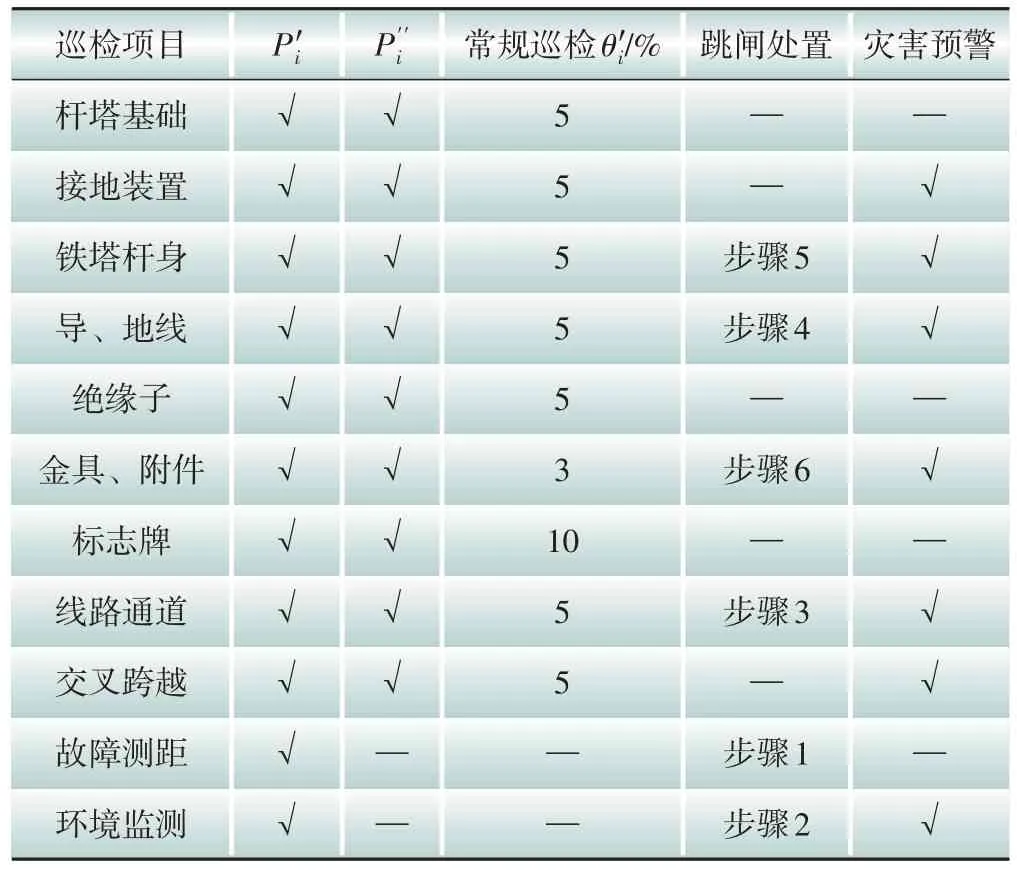
表3 立体巡检典型场景举例

式中:m′为灾害预警场景下机巡策略集合中巡检项目数量。
4)安全监护场景。适用于隧道(管廊)内应急逃生,接入消防告警监测数据,消防启动后,隧道内全景可视装置判断人员位置,通过声光装置在全隧道(管廊)通报危险情况,播音器引导人员撤离,启动应急灯、应急报警装置,确认隔离区间无人后,自主关闭防火门,阻断危险源。
5)扩展应用场景。根据特殊需求制定巡检策略集,满足扩展应用需要,例如联动架空线路载流量,通过视频采集线路弧垂、导线张力等,探索线路载流裕度;联动电缆线路载流量,通过采集电缆内置测温仪数值、电缆接地环流、电缆局放数值,探索电缆载流裕度。
3.2 输电设备、前端装置状态评估
在式(2)基础上,输电设备、前端装置通过巡检数据进行状态评估,评估数据来源包含实时数据、历史数据。评估结果分为两种情况,状态正常则巡检策略执行正常周期,状态异常执行特殊巡检周期。
3.2.1 输电设备状态动态评估
如图3 所示,感知层监测数据联动设备台账、带电检测数据、停电试验数据等多维度指标,形成数据池,建立诊断模型。在线监测数据与规程值相比,超出预警值的判定为异常,多个类型在线监测数据告警情况相互验证,形成状态评估结果,根据评估结果调整监测周期。以电缆设备为例,一是电缆高频局放、光纤测温、红外测温、接地环流、内置式测温等在线监测定期与规程规定值比对、与历史值纵向比对,形成评估报告;二是根据评估报告,自行调整监测周期,并进行各在线监测数值间的多源验证;三是联动管理后台巡视周期模块,以设备状态评估结果为依据,动态调整巡视周期。
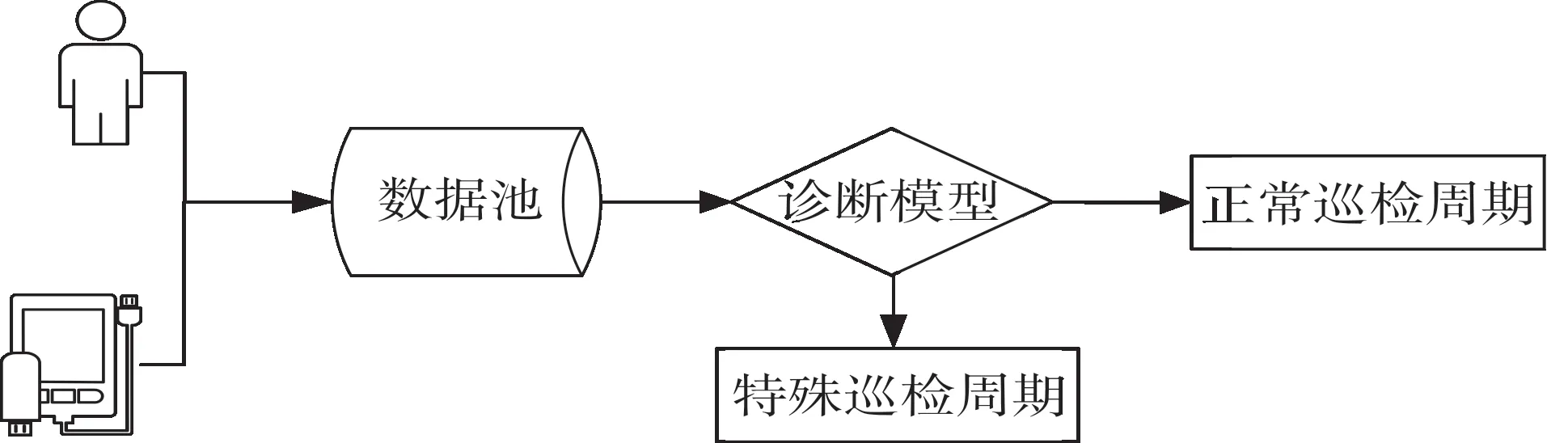
图3 输电设备状态动态评估
3.2.2 前端监测装置状态动态评估
如图4所示,前端监测装置设定自检程序,自检异常的进入退出运行状态。自检正常的,设定前端监测装置状态评估模型,与最近一次人工巡检数据相比,不超过设定可接受偏差率为正常,可继续运行,超过则进入退出运行状态。以电缆隧道监测装置为例,一是通过边缘计算中心设定在线监测装置、环境监测装置、环境控制装置、消防监测装置、消防控制装置、巡检机器人、视频监控、安防监测装置、安防控制装置等定期自检。二是联动带电检测模块,自行反向校验在线监测设备状态,自主控制在线监测设备投退。三是联动集中监控平台班组计划模块,自主生成异常装置检修计划。
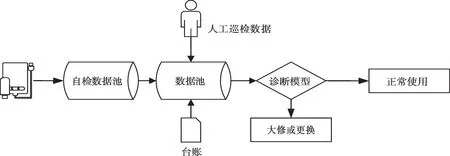
图4 前端监测装置状态动态评估
3.3 输电通道自主巡检
在式(1)基础上,通过压缩Px、减小θi或适当提高θi′,可以在通道巡检上最大化实现机器代人。通过智慧感知系统的安装与完善,加强对输电通道的实时感知控制,进一步优化通道巡检策略[14-16]。
3.3.1 线路通道自主巡检
1)架空线路通道自主巡检功能设计
从日夜间可视化自主巡检、特殊危险点防外破监测、无人机自主巡检三个维度进行功能设计,如图5所示。一是利用具备360°全景可视、星光夜视能力的图像视频等可视化装置,辅以图像智能识别技术,实现重要输电线路通道全景可视。500 kV架空输电线路实现逐塔可视,220 kV及以下架空输电线路的“三跨”等重要跨越区段、机械外破区段等特殊区段实现通道可视。二是开发智能防外破功能模块,通过建立基于GIS 的线路电子地图,在线路周围设置电子围栏。将北斗定位防外破装置安装到吊机、灌浆车等特种车辆上,通过北斗卫星定位实时掌握特种车辆位置,越线告警推送,实现输电线路由“人防”到“技防”,由被动防控到主动预警。三是开展无人机自主巡检。建立基于高精度定位和三维点云模型自主航线库,推进航线自动生成与调用、一键作业及标准化巡检拍摄、精准返航等功能实用化,实现适航区域500 kV 及以上线路点云数据、自主巡检航线全覆盖。基于变电站-变电站建设全方位远程自主起降的无人值守机巢,搭配长航时无人机,实现输电线路通道、杆塔远程自主巡检和应急处置。
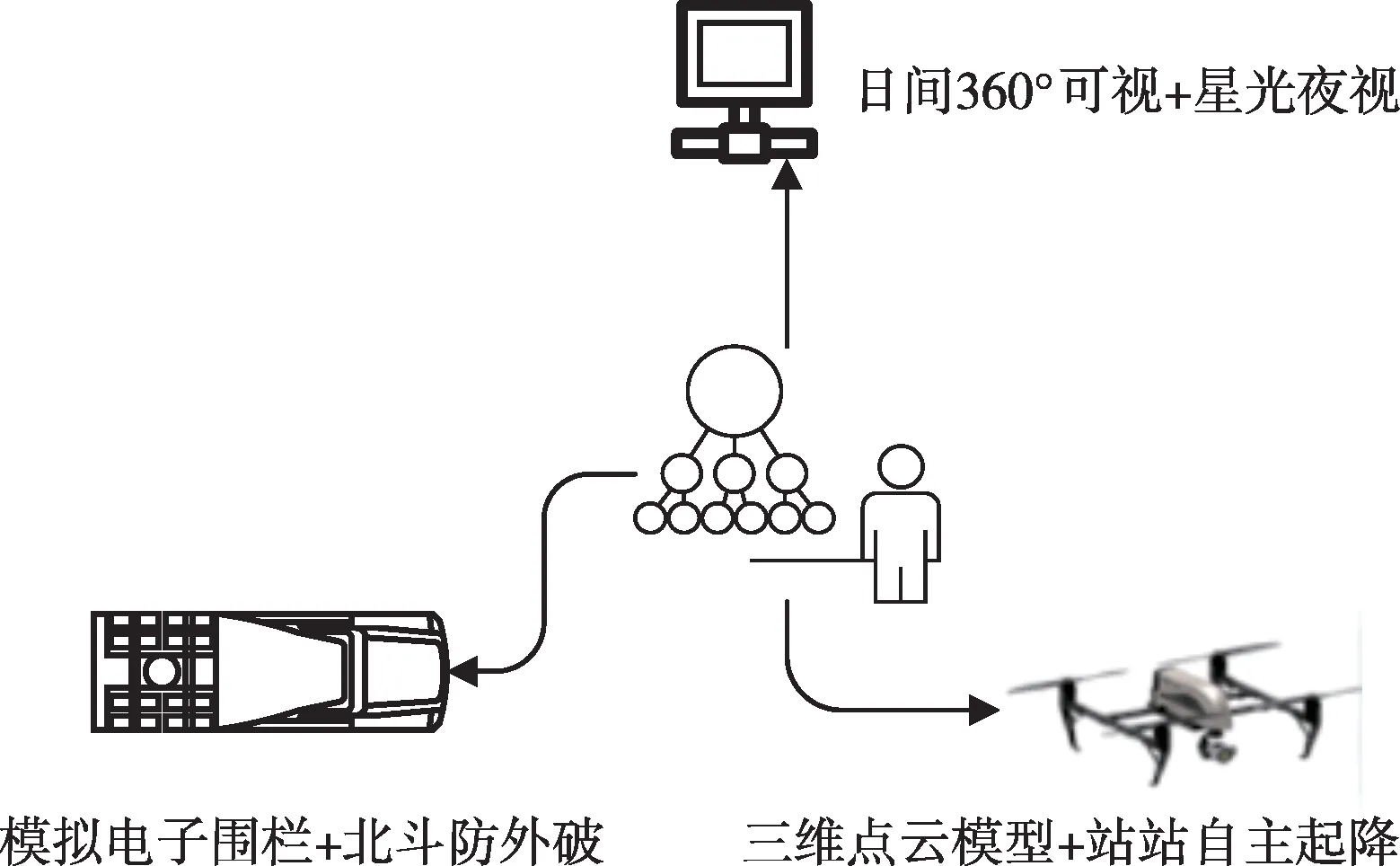
图5 架空线路通道自主巡检
2)常规电缆通道自主巡检功能设计
从常规电缆通道外部可视化、特殊危险点防外破监测、工井异动监测三方面进行功能设计,如图6所示。利用通道可视化装置,一是对电缆通道进行实时监控及定点、定时抓拍照片留档,每日通过视频远程巡检电缆通道状况。二是实现电缆通道危险点智能管控。当电缆通道保护区出现大型机械施工时,联动智能地钉、电子桩、可视化装置等,确认告警信息并及时推送告警,后台联动通道可视化装置,进行拍照或视频取证推送。三是实现防盗自主告警。当电缆工作井盖板被非法开启时,联动工井防异动装置,告警信息及时推送,并通过可视化装置拍照取证,实现防盗智能告警。使普通通道巡检从有人员驻守模式转变为无人巡检模式,有效减少作业人员投入。
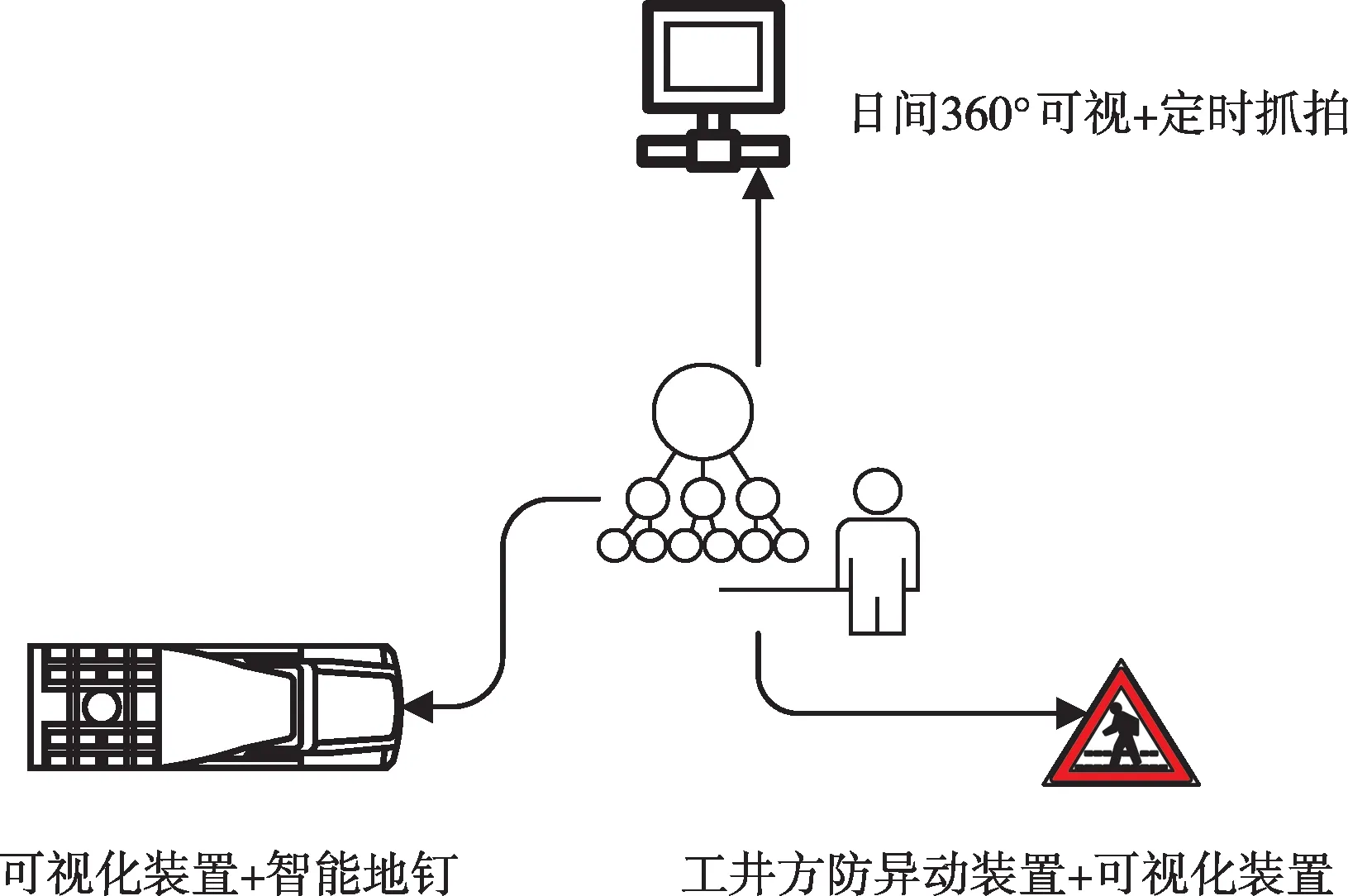
图6 常规电缆通道自主巡检
3)电缆隧道(管廊)自主巡检功能设计
将巡检机器人与电缆本体状态监测、隧道环境监测、视频监控联动,进行功能设计,如图7所示。利用高性能巡检机器人联动在线监测装置、环境监测设备、视频动态监控系统及安防系统等,针对隧道内电缆本体、附属设备、附属设施等对象,巡检机器人按例行巡检计划、故障巡检、临时巡检等任务沿轨道移动,并进行高清视频及图像记录,发现异常可向管理后台发出警告,并自动记录报警信息,后台可随机调取电缆运行状态监测数据,判断是否出现险情。巡检机器人对隧道内电缆本体及其附属设备、设施进行红外图像数据采集,分析各类检测点温度是否异常并自动生成任务报表,发生异常时可自主告警。利用隧道巡检机器人实现自动与手动巡检、红外热成像采集、双向语音、自检与自充电、主动报警、巡检报告自动生成等功能,使电缆隧道的巡检工作从传统的“人工巡视+带电检测”转变为“机器巡视+监测验证”。
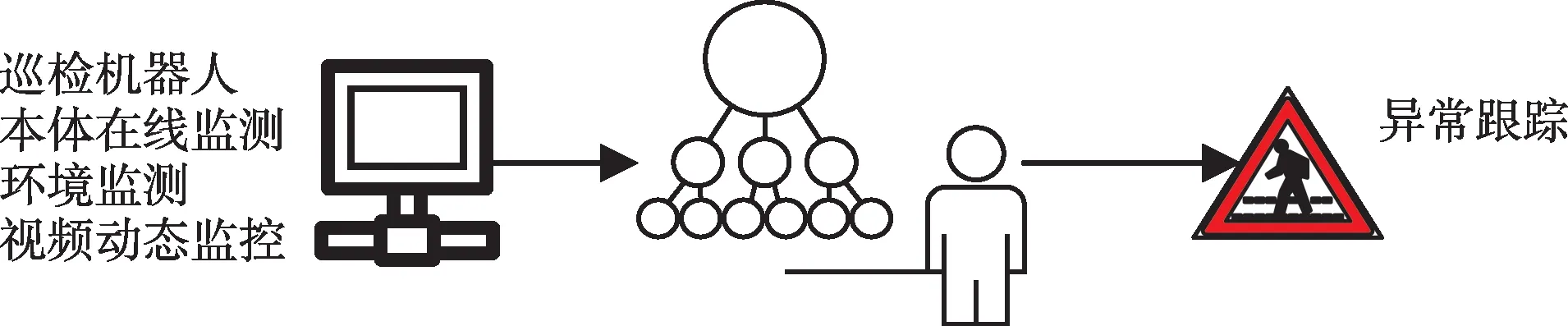
图7 电缆隧道(管廊)自主巡检
3.3.2 通道自主巡检策略优化
架空线路通道巡检方面,通过无人机、可视化和智能防外破设备,调整人工巡检的周期和要求。到位巡检由人工巡检开展,每月一次。通道巡检为无人机巡检,每月一轮,可视化巡检每小时一轮,人工巡检每周一次。保电巡检根据保电等级增加可视化巡检。危险点巡检根据等级制定差异化要求,其中一级危险点可视化巡检20 min一轮,人工驻守;二级危险点可视化巡检20 min一轮,人工巡检每天一次;三级危险点可视化巡检20 min 一轮,人工做好应急响应,不需开展周期性巡检。
电缆通道巡检方面,通过机器人、通道可视化装置、智能地钉、工井防异动装置等前端感知设备,对电缆线路通道巡检周期进行优化。普通电缆通道巡检由人工2周一次调整为可视化巡检白天100 min一轮,外加一月一次人工到位巡检。隧道内部通道周期巡检调整为机器人每日例行巡检,外加1月一次人工到位巡检。保电巡检根据保电等级要求,在原有人工保电巡检基础上增加可视化巡检。危险点巡检根据危险点等级制定不同巡检要求,其中三级电缆危险点人工驻守1天一次,外加可视化20 min一轮;四级电缆危险点可视化1h一轮,外加2周一次人工到位巡检。除常规性巡检以外,特殊巡检、应急响应要求30 min 内开展联动处置。借助隧道通道自主巡检,将示范区内隧道运检人数从当前的6人调整至2人,达到减员增效。通过隧道通道自主巡检,未来两年内新增隧道、管廊的情况下不新增运维人员,提高运维效率。
4 应用实践
该系统在宁波前湾智慧输电示范区、“泛三江”智慧电缆示范区进行了实用化验证。“泛三江”智慧电缆示范区覆盖18回110 kV及以上电缆线路共73 km,存在3 处外破危险点,按新模式巡检,配备2人通过远程可视化即可完成巡检工作。前湾智慧输电示范区安装全景可视化设备455套,结合无人机巡检,形成前端全视角、全时段立体巡检,实现通道全景可视、隐患全程管控,有效替代了大部分人工巡检,巡检工作效率明显提升,如图8所示,与常规人工巡检相比,某500 kV 线路通道巡检效率提升约5 倍,某220 kV 线路树障巡检效率提升约3.5 倍,某110 kV 线路杆塔精细化巡检效率提升约4倍。
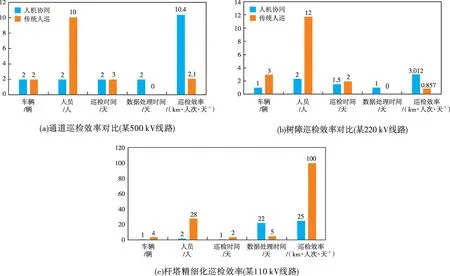
图8 示范区部分巡检工作效率对比
5 结语
本文通过对输电线路人机协同立体巡检系统设计与示范区建设实践,实现了前端感知层装置可信度评估、人机协同巡检策略生成、通道自主巡检等功能,提高了工作效率、降低运检成本,更好地保障了电网安全稳定运行。同时减轻了一线班组工作负担,在实操层面对人机协同作业具有一定参考意义。需要注意的是,提升机巡质量,例如图像识别准确性、缺陷诊断有效性等,是机器代人最直接、有效的措施,这方面需要更加深入地研究,才能使巡检系统更为科学、高效。
猜你喜欢
军事文摘(2022年8期)2022-11-03
家园·电力与科技(2022年2期)2022-03-26
军事文摘(2021年16期)2021-11-28
建材发展导向(2021年14期)2021-08-23
小学科学(学生版)(2021年3期)2021-04-13
哈哈画报(2021年11期)2021-02-28
领导决策信息(2017年12期)2017-05-17
家教世界·创新阅读(2016年9期)2016-05-14
中国科技纵横(2015年14期)2015-12-10
创新科技(2014年24期)2014-12-23