
驾驶机器人转向操纵的动态模型预测控制方法
2022-06-07 01:31:34姜俊豪
上海交通大学学报 2022年5期
在汽车试验中,对汽车操纵的准确性和重复性依赖于驾驶员的经验和反应速度,长时间试验会造成驾驶员反应速度变慢,从而影响试验数据的可靠性.驾驶机器人是指无需对现有操纵平台进行底盘改装,可无损安装在驾驶室内,替代人员在危险和恶劣环境及特殊极端环境下进行驾驶操作的特种作业机器人.通过操纵车辆执行机构(如方向盘、油门踏板、制动踏板、换挡手柄等),驾驶机器人能够实现自动驾驶.驾驶机器人能够进行性能自学习,通过学习不同车辆驾驶室的结构参数来操纵不同的车辆,因此具有良好的通用性,可广泛应用于车辆测试试验、抢险救援等领域.
会议由北京市海淀区教师进修学校刘汝明副校长主持,北京师范大学郑国民教授、王磊教授、郭玉英教授、罗少茜教授、郑林教授、李晓东副教授、王健副教授;中国教研网执行总监、北京市教育学会副秘书长朱立祥老师;北京市海淀区教委副主任、北京市海淀区教师进修学校罗滨校长出席会议。通过研讨,与会专家、教研员、教师一致认为,学科内容功能价值的理解、学习活动的层次性设计、教师教学行为的转变是进行学科核心素养发展、学科能力提升的教学改进的关键。
作为新型的自动驾驶解决方案,有必要对驾驶机器人操纵车辆的转向操纵控制进行研究.控制器的控制效果是影响驾驶机器人精确操纵车辆的重要因素.文献[7]将纯跟踪和矢量跟踪等方法与比例-积分-微分(PID)控制相结合,进行了多工况下的驾驶机器人转向操纵仿真试验,但未就驾驶机器人转向操纵的动力学模型进行推导.文献[8]设计了路径预瞄方法,将多模式切换控制策略与模糊PID控制器相结合,用于驾驶机器人车辆的车速与转向控制.文献[9]将预瞄方法引入驾驶机器人转向操纵控制,并进行了驾驶机器人操纵车辆的仿真试验,但随着车速增加,跟踪误差显著提高.文献[10]将以数据点的形式描述车辆的期望轨迹,基于模糊控制提出了驾驶机器人的轨迹跟踪控制方法,但跟踪结果误差较大.文献[11]提出了基于驾驶员行为的驾驶机器人鲁棒迭代学习控制方法,并在控制器设计中引入模型不确定性,但未考虑实际模型输入输出的物理量.文献[12]提出了用于驾驶机器人操纵车辆进行转向的PID控制器,但控制效果较差.
智能车辆运动控制的研究对驾驶机器人操纵车辆转向的控制方法具有借鉴意义.文献[13]将具有自适应时域特性的模型预测控制用于四轮独立驱动车辆的路径跟踪.文献[14]提出了一种基于高斯过程回归的车辆自动巡航系统学习预测控制策略,并建立了车辆巡航系统的预测模型.文献[15]提出了一种基于广义预测控制的主动转向控制器来保证车辆对于路径的跟踪能力.
传统的模型预测控制(MPC)具有固定的预测时域,而动态模型预测控制(DMPC)在模型预测控制的基础上,引入了预测时域调整方法.在路径跟踪任务下,建立路径曲率与预测时域的函数关系.根据期望路径曲率的变化,调整预测时域的大小.设计的预测时域调整方法能够在小曲率路段减小预测时域值,减少控制器求解计算复杂度;在大曲率路段增大预测时域值,以提高控制器跟踪性能.
综上,建立了驾驶机器人-被操纵车辆耦合系统的动力学模型,判定了耦合系统模型的可控性.利用卡尔曼滤波对耦合系统模型状态进行估计,并结合估计状态与耦合模型设计了增量式模型预测控制器,并在此基础上,拟合预测时域与路径曲率的关系,得到预测时域可变的动态模型预测控制器;在不同驾驶工况下,通过仿真与试验验证了提出方法的有效性.
1 转向操纵模型
1.1 转向机械手动力学模型
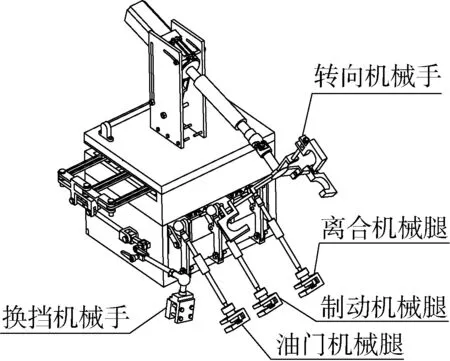
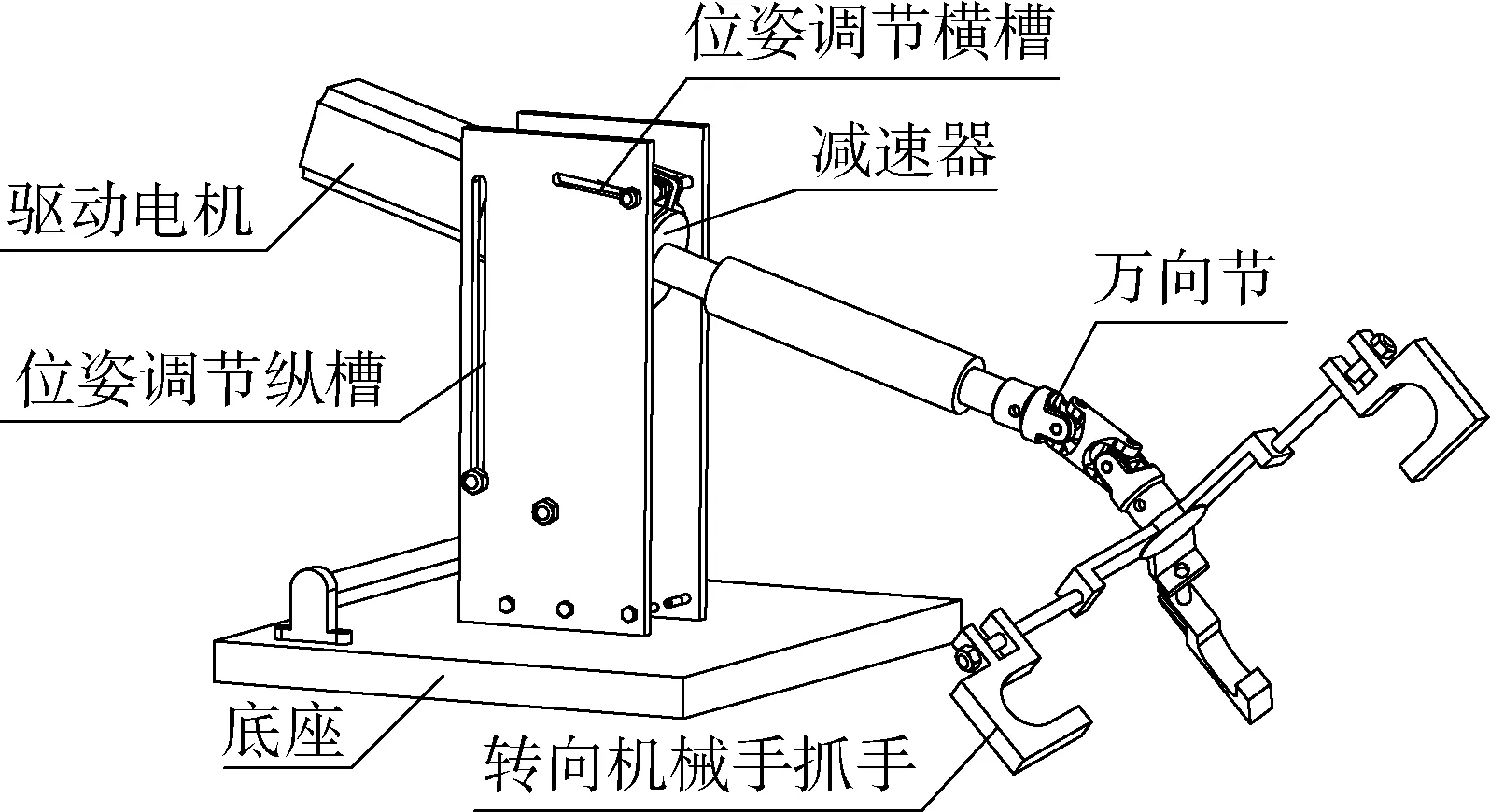
驾驶机器人由转向机械手、换挡机械手、油门机械腿、制动机械腿、离合器机械腿组成,在结构方面具备了同时操纵车辆的方向盘、换挡手柄、离合器踏板、制动踏板、油门踏板的能力.驾驶机器人整体结构如图1所示.转向机械手是实现驾驶机器人对被操纵试验车辆进行转向控制的结构,由底座、位姿调节槽、驱动电机、减速器、万向节、转向机械手抓手组成.转向机械手结构如图2所示.
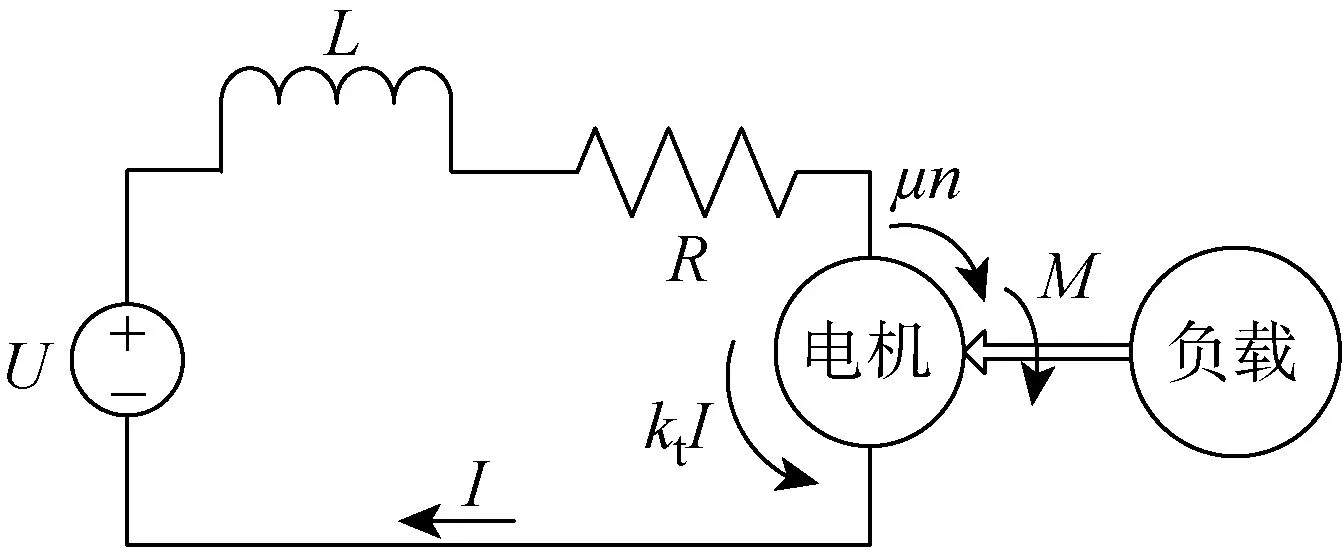
转向机械手驱动电机的等效电路如图3所示.其中:为电机转速;为电机的转矩系数;为负载力矩;为黏性摩擦因数;为电枢电感;为驱动电压;为电枢电阻;为电流.
所获得的转向机械手动力学方程如下式所示:
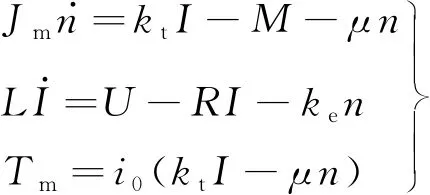
(1)
式中:为电机的转动惯量;为反电动势系数;为转向机械手减速器传动比;为转向机械手输出转矩.
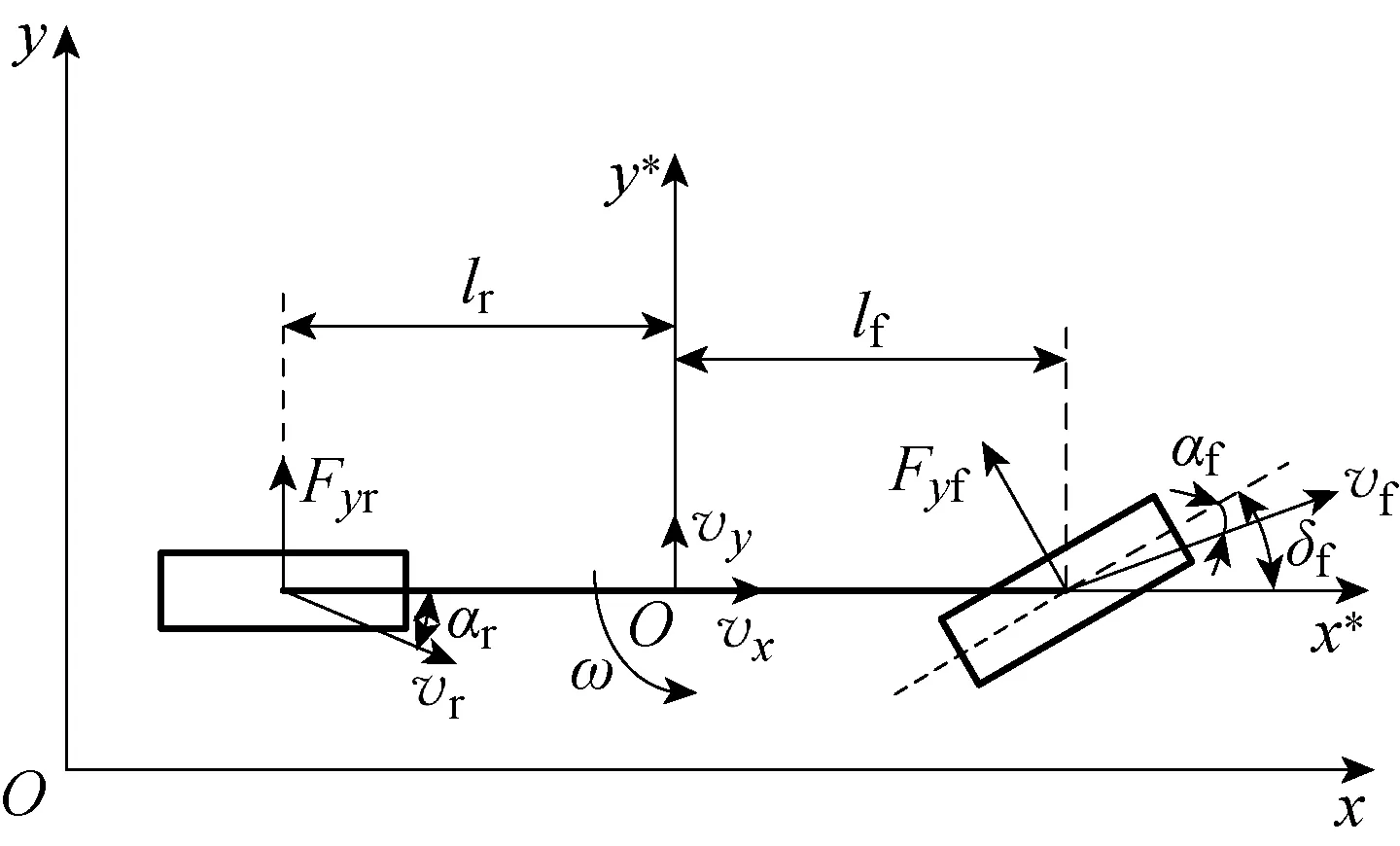
1.2 被操纵车辆动力学模型
驾驶机器人转向操纵主要涉及车辆的横向运动控制,因此,以车辆二自由度模型为研究对象.被操纵车辆模型如图4所示.其中:、分别为前、后轮速度;、分别为前、后轮侧偏角;f、r分别为前、后轮侧偏力;、分别为前、后轴到车辆质心的距离;为车辆前轮转角;为车辆横摆角速度;为车辆侧向速度;为车辆纵向速度;、为车辆坐标系.
对驾驶机器人-车辆耦合状态进行离散化,得到离散化状态空间为
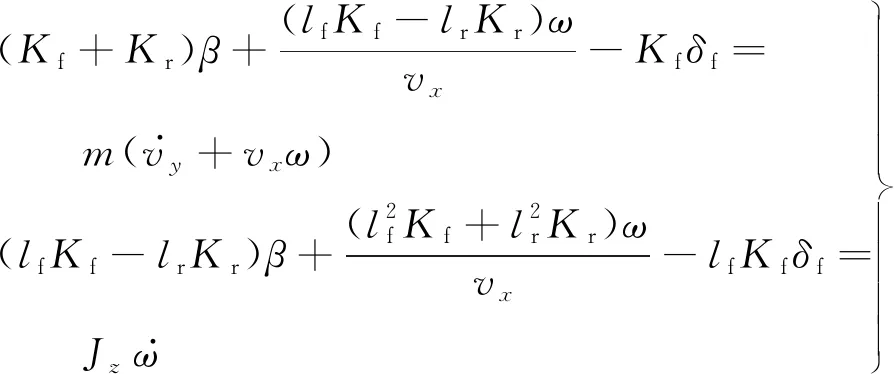
(2)
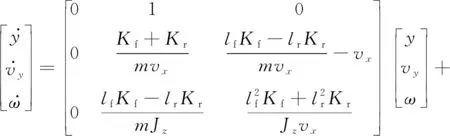
式中:、分别为车辆前、后轮的侧偏刚度;为整车质量;为车辆绕坐标系轴的转动惯量;为质心侧偏角,其在数值上满足=tan,但由于该值较小,所以可以得到≈
令为横向位移,将式(2)转化为以被操纵车辆的横向位移、侧向速度和横摆角速度为状态变量的状态空间形式如下:
溶液中离子的浓度除影响尿酸盐溶解度外,对MSU晶体成核的作用也不容忽视。在体外实验中,随着尿酸盐浓度的升高,MSU晶体成核越多;同时,提高溶液中Na+的浓度也可促进MSU晶体成核[7-8]。在生理条件下,K+、Mg2+、Cu2+对MSU晶体成核有较小的抑制作用,而Ca2+对MSU晶体成核没有影响;当Ca2+浓度过高时,形成的往往是尿酸钙晶体而非MSU晶体[7]。

(3)
被操纵车辆的转向系动力学方程为
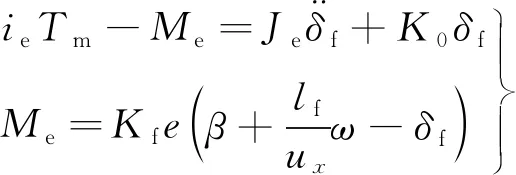
(4)
式中:为转向系传动比;为车轮回正力矩;为转向系等效转动惯量;为转向系扭转刚度;为轮胎拖距.考虑到=,=30/π, 得到初步的耦合模型如下式所示:
(5)

(6)

1.3 驾驶机器人-被操纵车辆耦合系统模型
驾驶机器人模型输入为电压,输出为机械手抓手的转角,而车辆的输入为前轮转角,引入转向系传动比,可以建立起驾驶机器人与车辆的耦合系统模型.令状态向量为

令输入为转向机械手驱动电机电枢电压,结合式(3)和(5)得到对应耦合模型的状态空间为
(7)
其中:
苏轼在《东坡易传》中阐释《系辞》的“理财正辞”时说:“位之存亡寄乎民,民之死生寄乎财,故夺民财者,害其生者也。害其生者也,贼其位者也……”,并进一步指出:“上之所行皆可以名言,财之出入有道,而民之为非者可得而禁也。民不为非,则上之用财也约矣。又安以多取为哉!”。他提出要“因民之所利而利之”,保护和谋取百姓的利益,让人与物各得其所、各安其所。当然,他所言之利,非一己之私利,而是民众之公利,天下之公利,同时也是千万个体的生活需要和生存权力。这是苏轼税赋思想的最为核心的理论基础。



1.4 耦合模型的可控性验证
=diag(r,r, …,r)

(8)

(9)
计算得到, 判别矩阵的秩()=()=6,即状态、输出可控性判别矩阵是满秩的,耦合系统模型的状态与输出均是可控的.结果表明,通过调整与设计控制器的控制率,即加在驾驶机器人转向机械手驱动电机两端的电压,可以使驾驶机器人操纵车辆到达期望的横向位置,同时系统能到达期望状态.
“现在公司真的没钱了。”刚刚从ofo离职的员工Raven(化名)告诉《中国经济周刊》记者,“现在主要是通过变卖运维车辆等资产来换钱。同时,也在跟供应商谈债转股,以缓解资金压力。国内是很难再拿到融资了,老戴(戴威)正在努力在海外谈融资,以及寻找区块链项目机会。”
2 控制方法

(3)发展煤炭洗选需要全社会的广泛参与、理解和支持。煤炭洗选加工既是煤炭企业推进节能减排、发展循环经济的重要抓手,同时也是全社会节能减排的重要途径,需要政府、企业、用户等各个方面的通力配合,一方面通过政府出台政策法规、制定相关标准规范引导企业多洗煤,敦促煤炭用户使用洗选精煤;另一方面企业加大洗选投入,降低原煤直接入市;煤炭用户也配合建设、完善洗选煤优质优价市场,逐步带动原煤入选。
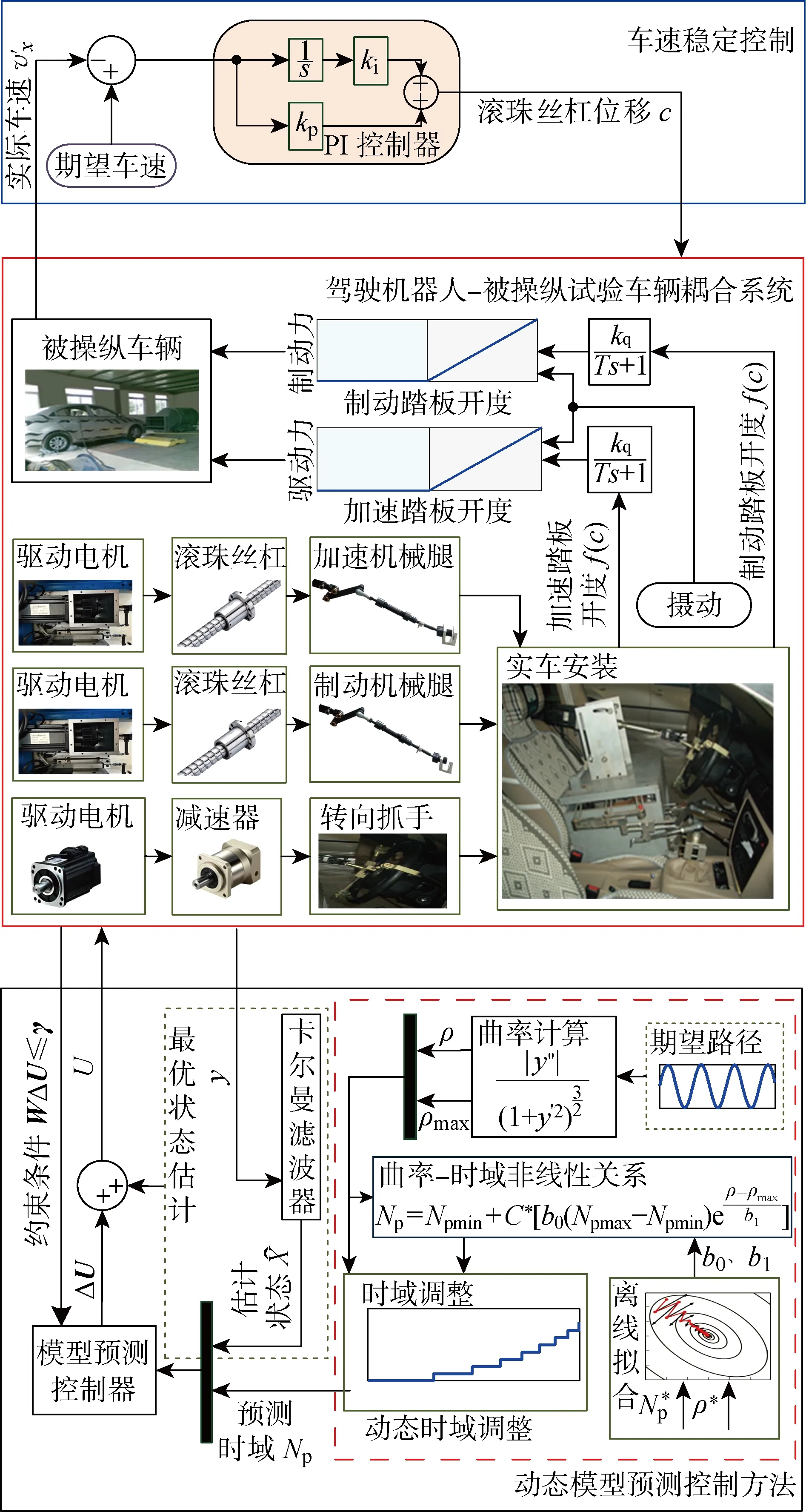
2.1 车速稳定控制
为使驾驶机器人操纵车辆转向时,克服因踏板摄动引起的车速变化,达到等速转向的目的,设计了车速控制的PI控制器.控制器输入为车速误差,输出为机械腿滚珠丝杠的位移.当摄动出现时,车速出现变化,PI控制器输出丝杠位移,以调整机械腿末端位姿,进而使车速稳定在期望车速.
车速误差始终存在于驾驶过程中,以文献[16]中±2 km/h的误差边界得到的误差范围,即控制器的速度控制精度指标要求为

(10)

根据文献[17]对机械腿模型的推导,得到机械腿的输入输出关系为
=()
(11)
式中:为输出踏板开度;为非线性函数.
考虑到踏板存在死区与延时特性,结合式(6)与(11)得到如下所示的车速-丝杠位移变化关系为

(12)

得到PI控制器的输出控制率为

(13)
式中:为PI控制器输出控制率.
2.2 系统状态估计
驾驶机器人的转向操纵控制,需要实时获取耦合系统模型的状态,用于模型预测控制进行优化求解.因此,利用卡尔曼滤波器对耦合系统模型的状态进行最优估计.
在被操纵车辆的侧向加速度绝对值小于0.4(为重力加速度)时,二自由度模型的微分方程为
(14)

先验估计:

(15)

(16)
后验估计:

(17)

(18)

(19)
=
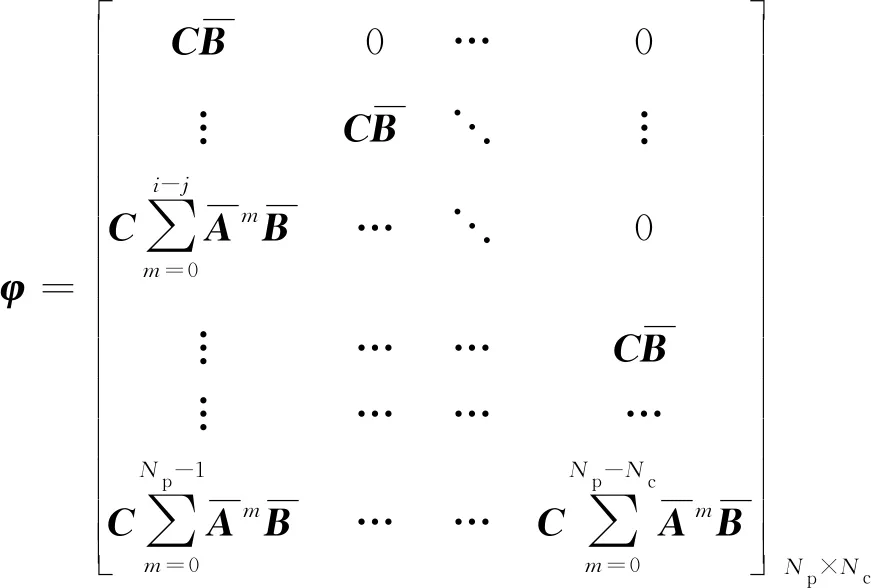
2.3 动态模型预测控制器设计
驾驶机器人在操纵车辆转向时,会因路面颠簸以及侧向力的作用,使其位姿出现微小变化,表现为加速机械腿对油门踏板或制动机械腿对制动踏板造成的摄动.踏板摄动的存在会使车速发生改变,低速转向时,踏板摄动与车速变化关系如下式所示:

(20)
进一步展开式(21)后,得到:
展开后,目标函数与约束的简化形式如下:
(Δ)=+ΔΔ
(21)
s.t.≤(=Δ+)≤
江城县地处西南边疆,有“一脚踏三国”的美称,与东盟接壤,云南桥头堡战略的实施为江城县果业发展和水果流通提供了地域优势。同时,由于江城县紧靠东盟各国,在水果的运输、贮存方面所花的时间短、运输成本低,因此在产品价格上有大优势。
Δ≤Δ≤Δ



其中:
=Δ+






=diag(q,q, …,q)
驾驶机器人-被操纵车辆耦合模型的状态可控性、输出可控性分别决定了耦合模型能否在输入作用下到达期望状态、期望输出,因此在设计控制器之前,需要对被控对象进行可控性分析.耦合系统模型的状态、输出可控性判别矩阵如下式所示:

式中:+为第个预测步下的期望横向位置;为控制时域;q、r分别为第个预测步下的横向误差权重和第个控制权重.
(Δ)=ΔΔ+ΔΔ+
Δ+Δ
(22)

(Δ)=Δ+ΔΔ
(23)
s.t.Δ≤

由问题模型可知,随着的增大,模型考虑到更多的未来状态,优化目标朝着缩小更长预测范围内的误差发展,能够提升驾驶机器人转向操纵的能力.同时矩阵与矩阵的尺寸会显著增大,增加控制器的计算复杂度,其表现为求解时间的增长.
设定最小预测时域为和最大预测时域为,并计算出目标路径的最小曲率和最大曲率.设预测时域与期望路径曲率具有类指数的函数关系.设定参数、, 预测时域与曲率的实际函数关系为

(24)
将多种具有单曲率的路径作为期望路径,加入闭环控制系统中通过调试确定次优值以获得准确的跟踪结果.以式(24)为基函数,多组曲率路径以及其对应的进行离线的非线性拟合,得到参数、的具体值.

()=
第二,起步阶段为集成大量全文资源,提供在线资源检索与全文获取服务,内容第一,形成资源优势与品牌效应。到目前为止,这依然是各大服务商的主营业务。

(25)
令误差函数为
(26)
误差对参数、求偏导得到
(27)
(28)
其中:
目前,诸城市已初步建起榛缘欢乐谷、竹山生态谷、苹果乐园、东方田园、龙门口度假区等20处林园综合体,成功开发了以榛子油、板栗休闲食品为主的30多个林果深加工产品。通过建设林园综合体,延伸精深加工、物流仓储和商务服务产业链条,提升林产品转化率和林业附加值。

财务会计和管理会计是传统会计工作的两个分支。而二者相结合会改变现在的会计准则,改变现在的会计制度体系,也将会改变现在的报表陈报方式。在会计电算化出现之前,对外财务报告与对内财务报告作为财务报告的两类形式。必须遵循国家财政部门制定的相关会计制度与准则的是对外财务报告,而对内财务报告没有固定的标准,反而是由会计管理人员自己决定的。会计电算化实现之后,把财务会计与管理会计结合起来,统一看待,对外财务报告与对内财务报告的划分也将会不复存在。因此,会计电算化对会计工作的财务报告编制也有影响。


根据梯度下降法,为使误差极小化,令
(1)在经过处理后的数据中一共有1875位会员,将每位会员的预定限额作为第1个指标xk1。任务可以开始预定的最早时间为6:30,每位会员的开始预定时间与6:30相差mk分钟,mk=(0,3,6,,,90)。当 mk≠0 时,取


其次,计算机网络信息安全管理制度不完善。例如,部分企业在计算机信息技术应用过程中并不注重计算机网络信息数据的安全管理,以致于计算机网络系统运行时网络信息数据安全性得不到保证,不完善的制度会被网络黑客钻空子,入侵到企业系统后就会影响企业整体网络系统的运行,严重的话会影响企业经济效益。
用锹捯7~8次,在捯拌中,依据混拌土的干湿度,适当用喷壶,喷5.5~6.5升水,搅拌均匀,达到手捏成团不滴水,落地混拌土自然散开为宜。
3 仿真与试验验证
3.1 仿真验证
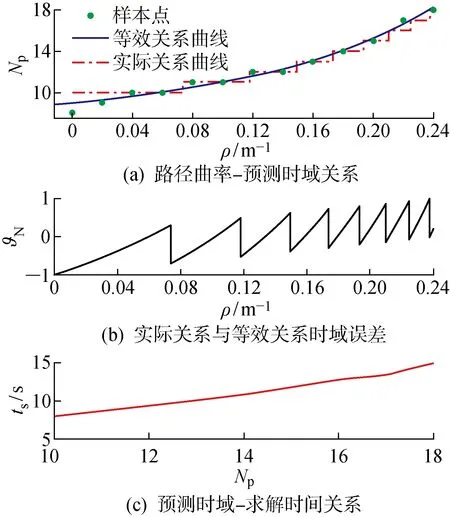
为验证驾驶机器人操纵试验车辆的路径曲率-预测时域的实际关系式(24)对等效关系式(25)的可替代性,以及得到拟合参数,将设计的模型预测控制器用于耦合系统,在多种不同曲率的单曲率路径下进行路径跟踪仿真,调整预测时域至跟踪误差幅度小于0.1 m,得到对应路径曲率下的最佳预测时域的次优解,并记录不同预测时域下,控制器单次求解所需的系统时间.不同路径曲率下的次优预测时域如表1所示.
结合式(25)、(27)、(28)得到的等效关系曲线的拟合结果如表2和3所示,预测时域动态调整特性如图6所示,其中:ϑ为预测时域误差;为控制器求解时间.表3中的确定系数与自由度调整确定系数接近于1,说明拟合的非线性关系中,路径曲率对预测时域有准确的解释能力.图6表明了路径曲率的增大,控制器的预测时域也随之增大,同时也引起求解时间的增加.此外,图6(a)中多数样本点落在等效关系上,且实际关系曲线与等效关系曲线之间的误差由式(24)、(25)可知,在一个时域之内.由于预测时域只能以整数形式存在,所以图6(a)产生的误差已经在理论最小范围之内.
3.2 试验验证
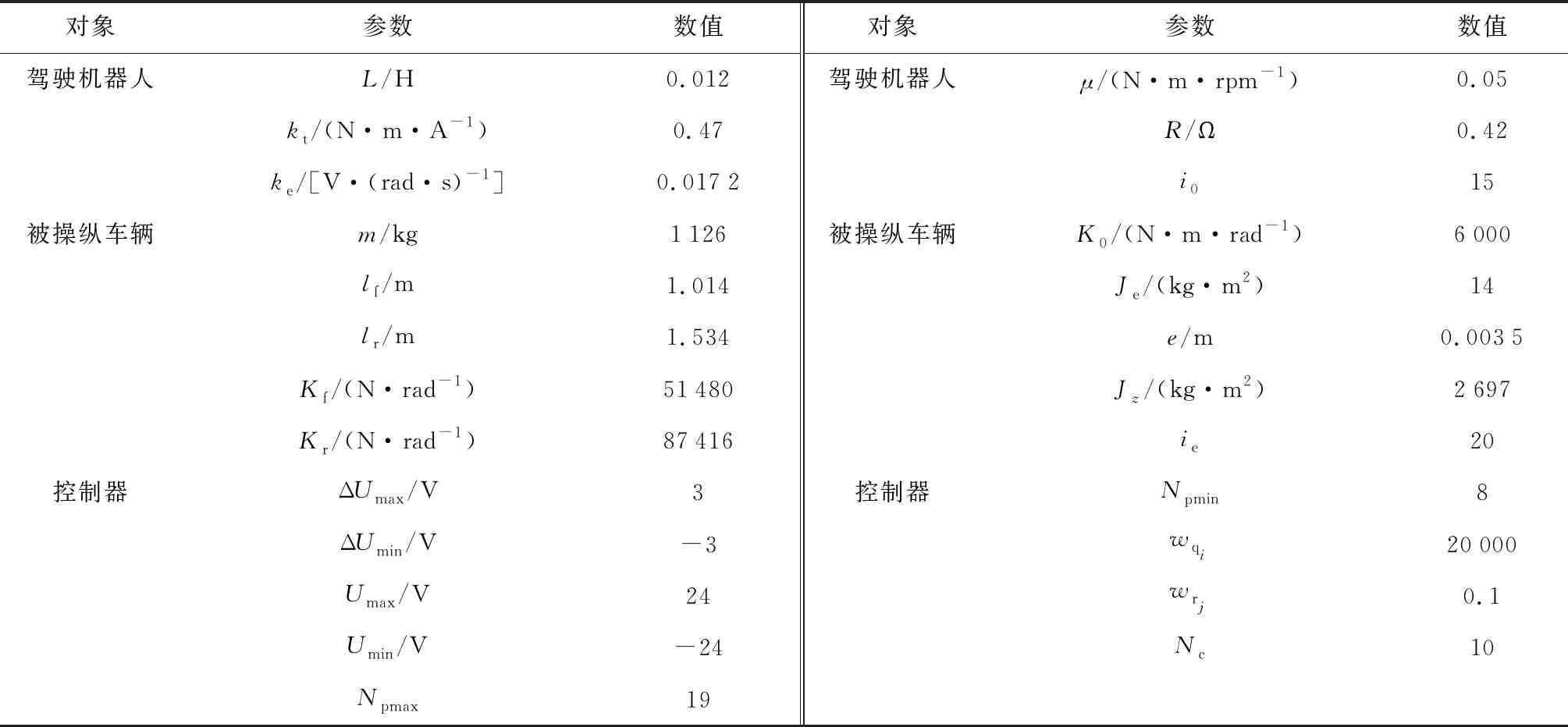
为验证提出方法对驾驶机器人转向操纵控制的有效性,将驾驶机器人安装于试验车辆,安装图如图7所示,进行了双移线试验.试验时初始车速为30 km/h.关键性能参数如表4所示.双移线试验由熟练驾驶员在交通部公路交通试验场对桑塔纳某型号轿车进行.侧向加速度、横摆角速度和车辆位置信息由CDY-3车辆动态测试仪进行测量,纵向车速由OES-II 非接触速度传感器测量,质心侧偏角可以间接测量.试验中由驾驶员操纵车辆,其中2名试验员随车实时采集测试数据.

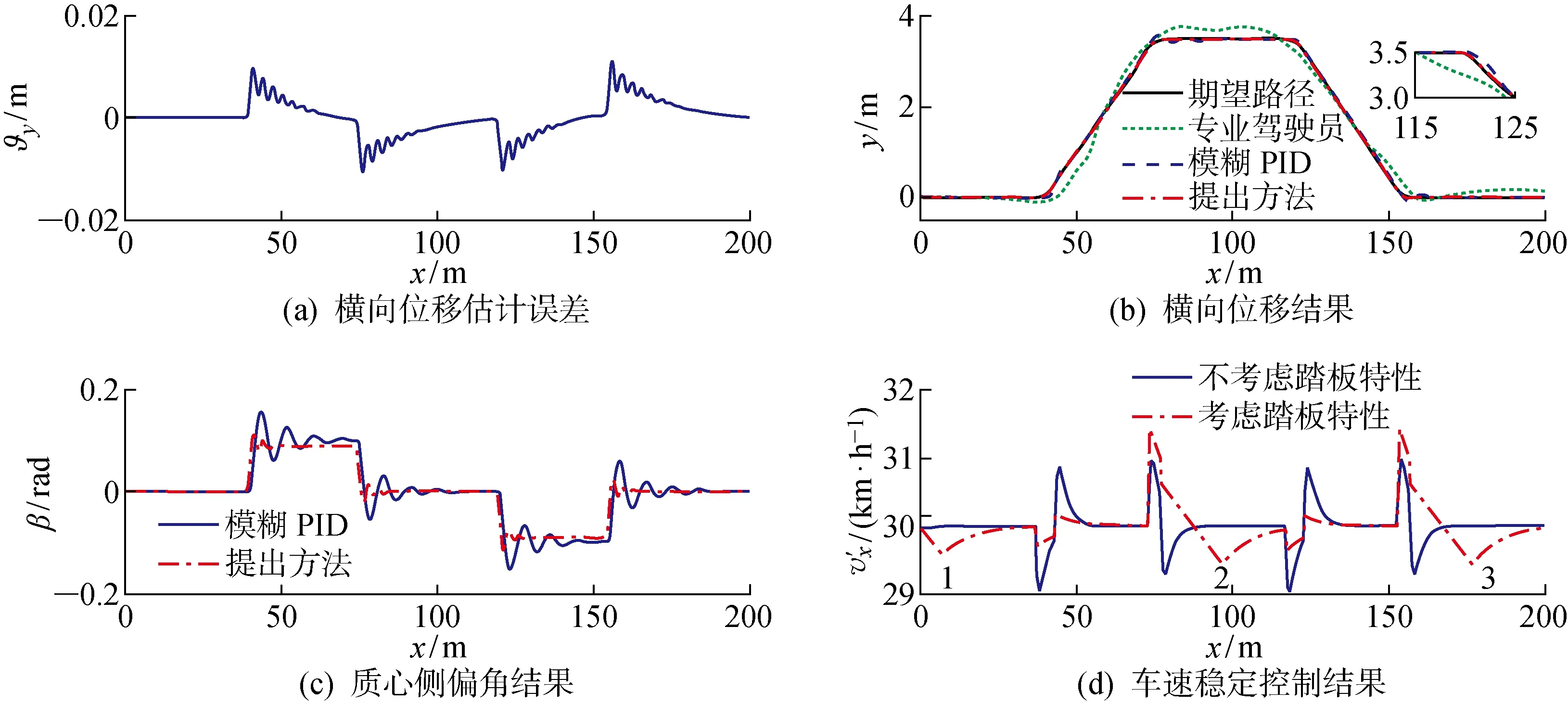
为验证提出方法能够控制驾驶机器人实现对试验车辆的精确操纵,以及卡尔曼滤波器的估计效果,在双移线工况下进行了驾驶机器人转向操纵的试验.为验证提出方法的控制精度,将提出方法的跟踪结果与人类驾驶员、模糊PID方法的跟踪结果进行了对比,结果如图8(a)~8(c)所示.此外,设计的PI车速稳定控制器的性能,以及考虑踏板特性的影响的控制结果如图8(d)以及表5所示.其中:为纵向位移; ϑ为卡尔曼滤波估计的横向位移的误差.
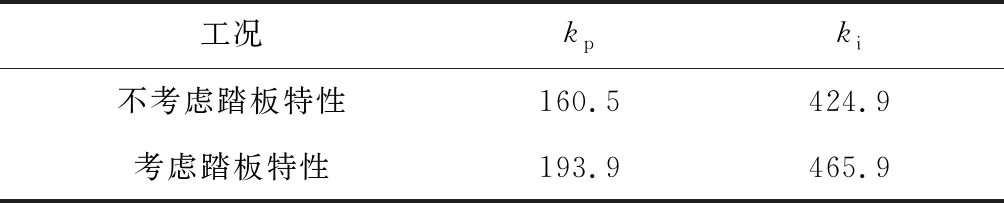
图8(a)给出了卡尔曼滤波器对横向位移这一状态的估计结果,在路径曲率的变化处,即期望路径的4个角点,估计误差相对较大,而整体上实现了准确的状态估计.由图8(b)可知,模糊PID方法与提出方法均能有效跟踪期望路径,且提出方法所产生的误差更低,而人类驾驶员不能良好地跟踪期望路径,存在较大误差,主要时由于驾驶员驾驶过程中存在反应滞后以及心理因素.由图8(c)可知,驾驶机器人在模糊PID控制操纵车辆具有更大的质心侧偏角,且跟踪过程中质心侧偏角波动较大,行驶过程中的稳定性较差,该现象主要是由于模糊PID主要考虑横向位移上的误差来建立误差与控制率之间的关系,未对系统其他状态进行约束,而提出方法对系统状态的约束,尤其是对侧向速度的约束,使得驾驶机器人的转向操纵具有更小且更平稳的质心侧偏角,即在精确跟踪期望路径的基础上实现稳定转向.由图8(d)可知,设计的PI控制器能够在考虑踏板特性和不考虑踏板特性的情况下均能稳定将车速稳定在容许的范围内,但由于踏板的时延特性会延迟控制率的作用,即控制器对驾驶机械腿的调整相对于车速变化的时刻会出现滞后现象,致使车速稳定在试验车速30 km/h所需的时间增多.同时,在以不可微函数形式存在的死区特性的影响下,控制率会发生突变,使得车速变化存在如点1、2、3的不可微处.根据表5可知,考虑踏板的死区特性和时延特性后,控制器的增益值有明显增大,增加了控制器的功耗.
为进一步验证基于提出方法的驾驶机器人的转向操纵性能,以及控制器可变时域特性,进行了另一型移线工况的试验,并将提出方法与模糊PID以及线性二次调节器(LQR)进行对比,试验结果如图9所示.
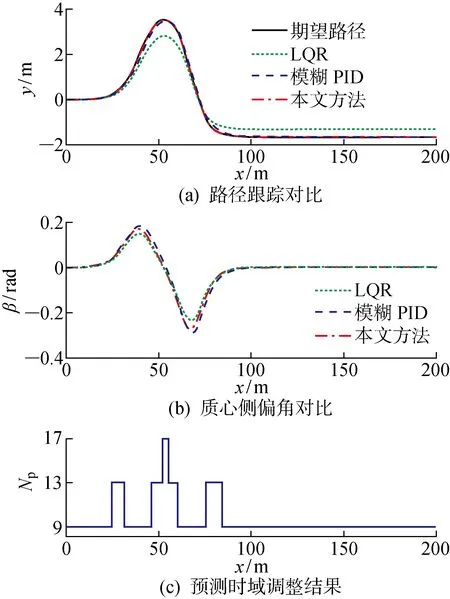
由图9(a)可知,模糊PID控制方法与本文方法均能有效控制驾驶机器人操纵车辆进行精确跟踪,而LQR方法在曲率较大的路径拐点出现跟踪性能下降,且末端稳态误差较大,主要是因为LQR输出的最优控制率是基于状态反馈实现的,是一种比例控制,单独的比例控制难以消除稳态误差.图9(b)中,3种方法产生的质心侧偏角相近,其中LQR方法的质心侧偏角最小,但提出方法在具有相近质心侧偏角的同时,能够精确跟踪目标路径,进一步说明了本文方法的有效性.同时,图9(c)中的预测时域变化曲线说明了在路径的拐点处,即曲率较大位置,控制器动态调整了预测时域,提升了控制器的跟踪精度.
微表处作为一种常见的养护维修技术,具备经济、快速的优点,一般用来修复裂缝与车辙等病害[1]。本文首先介绍纤维微表处中纤维的作用机理,对纤维微表处提出施工建议,并基于某高速实际路面养护维修技术进行应用研究,提高养护维修工程的施工质量,以增加路面的使用寿命。
5 结语
建立了无人驾驶机器人与被操纵车辆的耦合系统模型,并对系统的可控性进行判定.构建了适用于耦合系统模型的卡尔曼滤波器,对无人驾驶机器人车辆的横向位置进行最优估计.建立了模型预测控制器预测时域与期望路径曲率之间的关系,对预测时域进行动态调整.进行了无人驾驶机器人操纵试验车辆在不同工况下的转向操纵仿真试验,并进行了人类驾驶员操纵车辆的实车试验.仿真与试验结果表明,提出的控制方法能够准确控制驾驶机器人的转向操纵.
后续将研究方法的实时性,并将改进后的方法烧录至无人驾驶机器人硬件控制系统,进行无人驾驶机器人的道路试验,以验证提出控制方法的实时性.
