
基于外推高斯过程回归方法的发动机排放预测
2022-06-07 01:47:38王子垚郭凤祥
上海交通大学学报 2022年5期
随着环保压力不断加大,汽车发动机排放日益受到关注.国六排放标准的强制施行对实际行驶过程的发动机排放提出严格要求,需要开展大量测试,但其周期长、成本高,难以满足汽车产品更新迭代的市场需求.另一方面,行驶工况复杂多变,实际排放数据难以获得.因此,需要研究能便捷且准确预测发动机排放的方法.
从表1可以看出,淮河流域干旱分区共分为5个一级区,10个二级区。就5个一级区、10个二级区而言,大区内部具有其相似性,尤其是在农业干旱发生的层面上,而二级区之间又有区域差异性,以下对各区域的特点进行分析,可为各分区干旱治理技术的发展提供科学依据。
(4)在完整的监控视频中;伤者丈夫刘某拍打巡逻车车门进行求救,车内巡逻员并未下车。在此之后到来的多辆巡逻车因道路原因无法开上老虎与受害人所处平台,也没有任何救助工具与措施,仅仅是反复冲坡、绕道寻找接近老虎的其他路径。
针对发动机排放的预测,国内外学者进行了大量的研究.基于静态映射的方法需要大量的标定实验,且难以准确映射瞬态工况下的排放.基于发动机燃烧机理的物理模型计算量大,预测精度往往受到难以获取的实际参数的限制.文献[5-6]基于Zeldovich理论预测发动机NO排放,需要准确的气缸压力信号,而缸内压力传感器价格高昂,限制了实车应用.基于实测数据的经验模型可减少计算量并获得较好的预测精度,但是工况适应性差.文献[7]基于发动机实测数据提出经典的NO预测方法,适用于高功率工况,但是在低功率工况下精度较低.
数据驱动的机器学习模型具有开发周期短和工况适应性强的优势,逐渐广泛应用于发动机排放预测.其中,神经网络模型应用最早,其瞬态工况的预测误差约为稳态工况的两倍.文献[9-10]采用支持向量机模型,得到的预测精度优于神经网络模型,但是数据集维度增大导致复杂度过高.长短记忆周期神经网络模型在发动机稳态或瞬态过程的NO排放均取得较高的预测精度.文献[13]提出基于粒子群算法优化的高斯过程回归(GPR)用于预测发动机排放.然而,这些模型的预测精度高度依赖于训练数据集的覆盖性,当测试集数据范围在训练集数据范围之内,则预测精度较高;反之,则预测精度变差.该依赖性导致训练集数据量增大,增加成本与开发周期,并降低实际行驶过程的排放预测精度.
夏商周时期的陶瓷作品多作为日常生活用品而存在和发展的,直到宋朝时期才逐渐的作为陈设出现于空间之中,然后经历了元明清的不断变化发展之后,几乎成为了生活中最为常见与平常的陈设物品。陶艺对工艺技法、形态、釉色等都有十分严格的要求,它是被视作一种品味和地位的代表,一般涵盖了花瓶、文具、瓷板画等器物,它们在空间陈设中起着重要的作用。
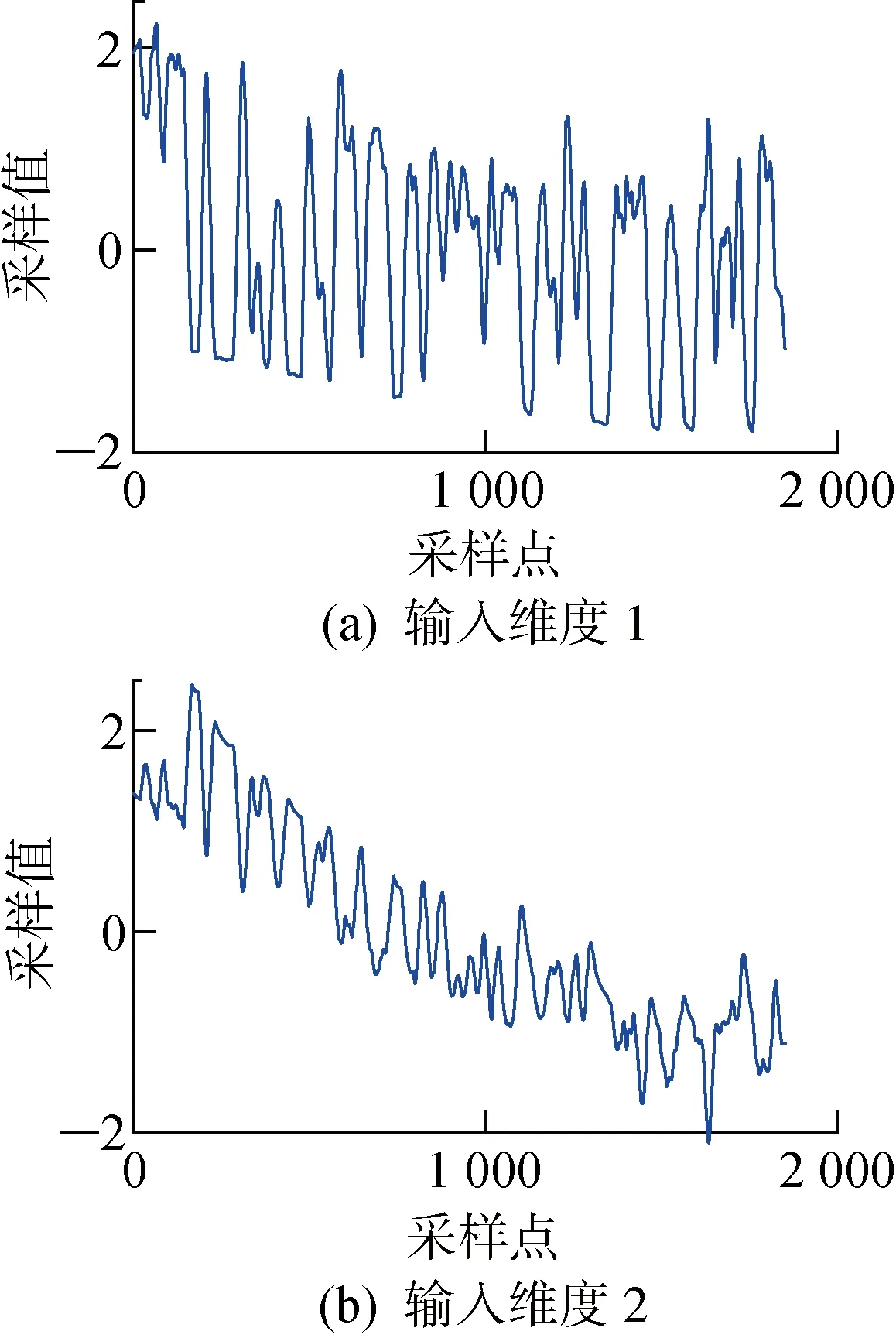
采用主成分分析方法将六维输入降低至二维,且保留至少80%的数据信息,当每个输入有 2 000 个采样点时,总采样数为4×10个.比较降维之前,六维输入所需的总采样数为6.4×10个.由此可见,通过降维,总采样数大幅缩小.降维后的输入数据如图2所示.
本文以搭载某缸内直喷汽油机的乘用车为对象,采集实际行驶污染物排放(RDE)工况的转毂试验数据,采用本文提出的外推GPR方法,预测训练集覆盖域之外工况的排放.预测结果与传统 GPR 模型和广泛应用的反向传播(BP)神经网络模型相对比.该方法为减少RDE试验成本、提高实际行驶过程排放预测精度提供参考.
1 数据获取及预处理

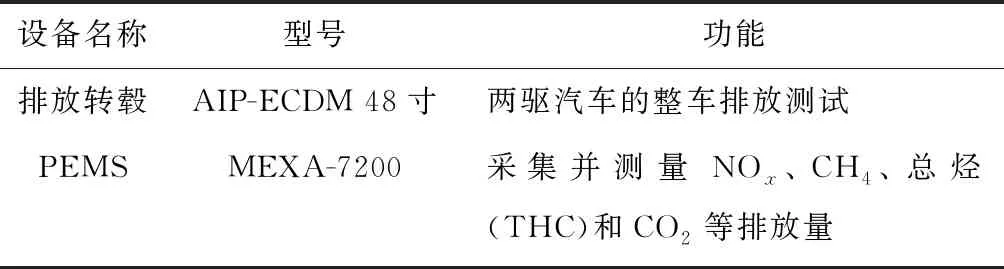
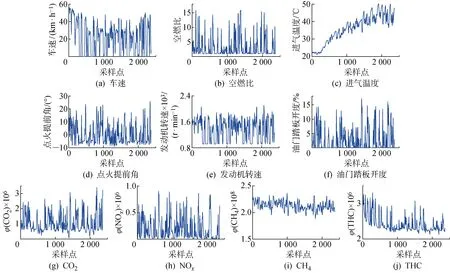
测试并记录的参数有10个,其中6个为影响发动机排放的主要因素,即车速、进气温度、空燃比、点火提前角、发动机转速和油门踏板开度,作为GPR模型的输入;4个为CO、NO、CH和THC排放量,作为GPR模型的输出.RDE工况的试验数据如图1所示,其中:(CO)、(NO)、(CH)以及(THC) 分别为该气体的体积分数.
1.1 数据预处理
数据预处理包括归一化、剔除奇异值和降维.
归一化即将每一组输入、输出参数的均值和标准差分别转换为0和1.剔除奇异值的原则为如果某个数据与其所在组数据的均值偏离超过±2.5倍标准差,则丢弃.然后采用Savitzky-Golay滤波器进行平滑.
针对上述问题,本文提出一种新的外推GPR算法.按欧氏距离将数据集区分为覆盖域内、外两个区域,以采用覆盖域内的数据集经预训练得到的传统GPR模型为基础,构建覆盖正负3个标准差的宽域输入集,提出以该输入集的预测方差均值最小为目标进行外推训练的新思路,修正传统GPR模型的超参数.对于正态分布输入集,宽域输入集能覆盖99.73%的输入取值;对于非正态分布输入集,能覆盖超过88.9%的输入取值,也就是说,能覆盖大部分训练数据集覆盖域之外的区域.因此,经外推训练的GPR模型能降低覆盖域外的预测方差,提高预测精度.GPR基于贝叶斯概率框架,通过概率推理预测均值、方差,适用于高维数、非线性复杂系统.针对具有周期性特征的数据集,文献[17]结合周期函数与平方指数函数构建新的核函数,提高GPR外推预测精度.文献[18]设计光谱混合核函数,用于大气二氧化碳和航空旅客数据的外推预测.文献[19]证明缩小GPR预测置信区间的宽度可提高外推精度,用于寻找合理采样点,有效减少训练集规模.迄今为止,外推GPR算法尚待深入研究,在发动机排放预测的应用未见报道.
1.2 数据集分区

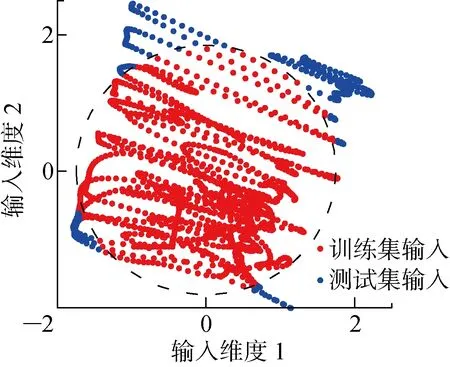
在以二维输入描述的坐标系中,训练数据集在分界圆圆内,而测试数据集在分界圆外,之间分界为欧氏距离(即半径)为 1.820 95 的圆,如图3所示.因此,这里的测试数据集的输入数值范围超出了训练数据集的覆盖范围,本文将设计外推算法提高预测精度.
2 外推GPR算法
()=-ln(|)=
2.1 核函数
采用平方指数(SE)核函数和谱混合成分(SM)核函数的线性组合作为GPR模型核函数,可以表示为
例如,在带领学生学习“圆”这部分知识时,我便按照班级学生的层级进行了分组,并为学生明确了合作学习过程中所应当遵守的准则,从而确保了合作学习的有效性。长此以往,学生会逐渐养成互动学习的良好习惯,在组内能够分工明确,各自为小组合作做出自己的贡献。
()=()+()
(1)

(2)

(3)
=1, 2, …,;=1, 2, …,

乳房 软一点的乳房健康,“软”就是手指按到嘴唇的感觉,按到鼻子的感觉那叫中等硬度,如果按着额头,这种感觉就是硬。如果乳腺里面出现了“硬”疙瘩,就可能意味着有问题。

短路损耗又称为额定负载损耗。当变压器在额定负载运行时一次、二次绕组流过额定电流,此时绕组中所产生的损耗称为额定负载损耗(变压器铭牌上为负载损耗)。额定负载损耗包括基本铜损和附加铜损两部分。
2.2 预训练
与传统GPR相同,采用极大似然估计对超参数进行预训练,即以最小化关于的负对数边际似然(NLML)函数为目标确定超参数的值.NLML的表达式()为
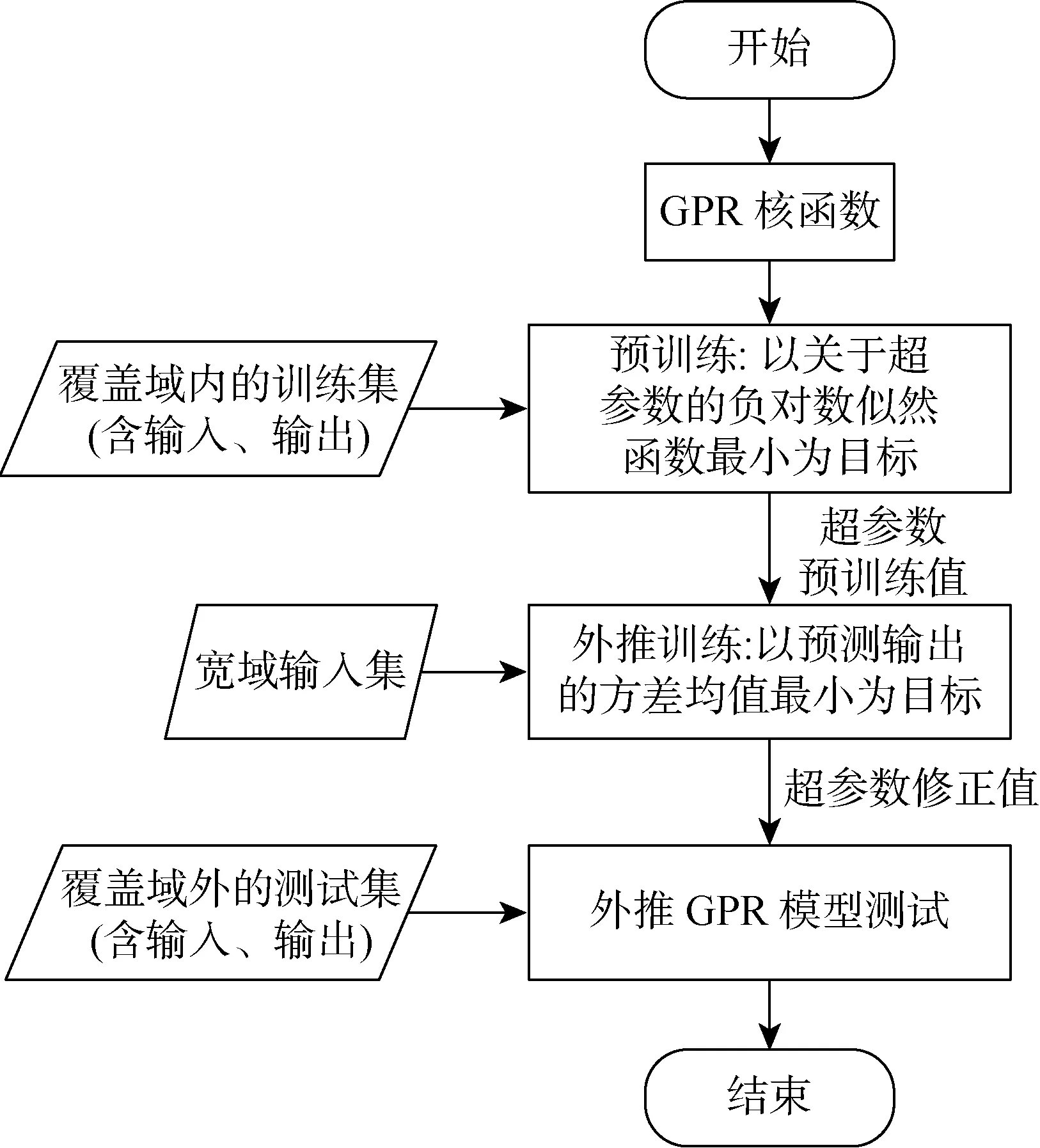
首先为GPR模型选择核函数,然后分两步进行模型训练.第一步采用覆盖域内的训练集,基于传统GPR框架进行预训练,使得预测输出的95%置信区间能覆盖测试数据集,得到GPR模型超参数的预训练值.第二步以宽域输入集作为GPR模型的输入,以预测输出的方差均值最小为目标继续训练,得到超参数的修正值;核函数与超参数共同构成完整GPR模型的数学表达式,采用覆盖域外的测试集进行测试,流程如图4所示.


(4)

使用梯度下降法求解式(4)的最小值,将超参数的预训练转化为最优化问题,即可得超参数预训练的解.式(4)的梯度为

(5)
式中:tr(·)为矩阵的迹.
2.3 外推训练
测试发动机为1.5T缸内直喷汽油机,装载于某乘用车,整车置于转毂试验台架,台架按照《轻型汽车污染物排放限值及测量方法(中国第六阶段)》RDE测试流程运行,分为市区、市郊和高速共3个区间,试验台架在3种工况下依次连续运行,总试验时间为90 min.试验用油为国VI标准#92汽油,采用便携式排放测试系统(PEMS)获取排放数据.试验台架与仪器设备如表1所示.
同样是金枝玉叶的段誉,第一次来燕子坞吃的那些:“茭白虾仁”“龙井茶叶鸡丁”,看看就教人馋涎欲滴。段誉的当时心理评判是这样的:“鱼虾肉食之中混以花瓣鲜果,色彩既美,自别有天然清香。”
为了提高训练集覆盖域外的预测精度,需要减小预测输出的置信区间宽度,即修正超参数,使得预测输出的方差最小,据此设计外推训练算法.为了避免陷入局部最优,外推训练以GPR预训练得到的超参数解为初始值.
首先,计算降维后的二维输入数据距离原点的欧氏距离,然后将输入输出数据按照该欧氏距离进行升序排列.将前80%的数据作为训练数据,后20%的数据作为测试数据.
响应政府规划,紧随行业发展趋势,投入智慧商圈建设,通过大数据处理分析,根据智慧停车、停车诱导的项目经验,得到集商圈管理、分析决策和用户服务于一体的综合产品、一站式解决方案,推动传统商业模式向基于大数据的精准化营销转型。



(6)
(7)
s.t.∈
式中:为的可行域.
3 实验结果与分析
采用平均绝对误差(MAE)和均方根误差(RMSE)评价预测性能.用同样的训练集进行模型训练,并用同样的处于训练集覆盖域外的测试集进行排放预测,将外推GPR的结果与传统GPR和BP神经网络的结果相比较,预测RDE过程发动机产生的CO、NO、CH和THC.外推GPR与传统GPR均采用式(1)的核函数,其中=10,=2.BP神经网络的层级结构为2-128-128-1,隐藏层激活函数均为LeakyReLU,输出层无激活函数,使用Adam优化器训练.
3个模型的4种排放预测结果如图5所示,其中:′(CO)、′(NO)、′(CH)和′(THC)分别为该气体归一化后的体积分数.由图5(a)、(d)、(g)和(j)可知,外推GPR的预测值与实测值吻合程度较好,基本上能反映实测值的变化.由图5(b)、(e)和(h)可知,而传统GPR对CO、NO和CH的预测有明显误差.由图5(f)、(i)和(l)可知,BP神经网络对NO、CH和THC的预测有明显误差.
3种方法预测的MAE和RMSE评价如图6所示.由图6可知,与传统GPR和BP神经网络方法相比,外推GPR显著降低了预测误差.具体地,外推GPR预测CO的MAE和RMSE分别为 0.447 5 和 0.582 5,比传统GPR降低35.68%和35.96%,比BP神经网络降低44.11%和40.01%.对于CH和THC,外推GPR降低预测误差的程度与CO相当.对NO的预测,外推GPR的MAE和RMSE分别为 0.704 9 和 0.889 6,比传统GPR降低12.23%和16.47%,比BP神经网络降低12.98%和12.21%.NO的预测误差较大,可能与NO排放机理相对复杂有关.总体上,将4种排放的预测结果求平均,外推GPR的MAE和RMSE比传统GPR分别降低24.27%和30.72%,比BP神经网络分别降低36.32%和30.72%.
试验发现,边坡系数对固体拦截能力影响明显高于骨料粒径的影响;覆土植草和无覆土植草均能够较好的拦截固体污染杂质,其中无覆植草组和覆土植草组对固体杂质拦截率高于普通硬化护坡。强降雨条件下植草对固体杂质的拦截作用明显提高,主要由于植株茎叶及根系对表层种植土质和固体杂质截留具有很好的拦截作用,同时植物能够吸收有害物质并将固体杂质分解为各种无机物、有机物,为微生物和植物提供了营养环境,进而减少了生物链内有害污染物的传播。


虽然4种排放的产生机理各不相同,预测精度也有区别,但是由于外推GPR建立的宽域输入集能考虑覆盖域外的输入,对4种排放的预测精度都有一定提升.宽域数据集以常用的平均采样方法对标准化后的输入分布进行采样而构建,不需针对排放输出特性进行特殊处理.因此,本文提出的外推GPR方法具有推广至其他应用领域的潜力.
4 结语
针对实际行驶工况下发动机排放的预测,本文提出外推GPR算法,用于预测训练数据集覆盖域之外工况的排放.预测结果与传统 GPR 模型和广泛应用的BP神经网络模型相比较.CO、NO、CH和THC的预测结果表明,外推GPR的平均MAE和RMSE分别为 0.534 11 和 0.715 58,比传统GPR分别降低24.27%和30.72%,比BP神经网络分别降低36.32%和30.72%.该方法可为降低实际行驶污染物排放工况的试验成本,提高实际行驶过程排放预测精度提供参考.
