
疏浚泵内泥沙颗粒的瞬态追踪数值方法
2022-06-07 01:32:12刘明明胡京招洪国军尤云祥
上海交通大学学报 2022年5期
疏浚泵通过泵送泥沙浆实现土石的不间断输送,广泛用于河湖底泥清淤、围堰造陆等作业,是一种重要的工、农业施工机械.泥沙颗粒轨迹对疏浚泵内流动及流道面磨损影响重大,是研究泵内流动以及提升泵性能和寿命的重要依据,也是近年来疏浚泵数值研究的热点.相较于用欧拉方法描述的粒液(Eulerian-Eulerian, E-E)求解策略,Eulerian-Lagrangian (E-L)耦合求解策略,即以Eulerian方法求解液相流场,以Lagrangian方法求解粒子运动的方法,具有能够得到每个颗粒速度、位置等信息的优势,常用于求解粒-流两相流动问题中的颗粒速度与分布情况.一些流体计算软件中集成了E-L颗粒追踪算法,如ANSYS Fluent中的离散相模型(Discrete Phase Model, DPM)、浓离散相模型(Dense DPM, DDPM)、ANSYS CFX 中的固粒输送(Particle Transport Solid, PTS)模型等,这些模型简化表征了颗粒碰撞作用或直接将其忽略,被用于叶轮机械的“非瞬时运动域”内粒-流两相流动及颗粒轨迹研究,得到许多有价值的结论.吴波基于Fluent DPM研究了粒径、叶片参数及转速等因素对渣浆泵内颗粒相对运动轨迹、撞壁速度及角度的影响.Pagalthivarthi等使用DPM双向耦合法研究了离心泵蜗壳内的稀疏颗粒运动以及流量、转速及蜗壳几何尺寸等因素对磨损程度的定性影响.李亚林等使用DPM研究泵内粒子对流体的跟随性,发现直径大于50 μm的粒子在泵内跟随性受密度影响较大,而20 μm左右的聚苯乙烯粒子跟随精度较高.Peng等基于稳态的粒-水两相数值计算,分析了混流式水轮机内转轮叶片和导叶磨损程度与运行工况的对应关系.邹伟生等使用PTS模型双向耦合求解了两级深海采矿泵提升锰结核过程,得到了泵内颗粒分布与泵特性曲线.Zhu等使用DPM对3种电潜泵最佳工况点下的两级流域磨损进行数值预测,比较了6种冲蚀模型的预测结果.Shen等通过联用E-E求解策略与DPM的方法,数值研究了甘肃景泰引黄提灌工程中双吸泵内的颗粒尺寸、颗粒形状以及颗粒浓度对泵性能与磨损的影响.
旋转叶片与蜗壳等静止部件的相对位置瞬时改变对泵内颗粒的运动轨迹有明显影响,因此泵内颗粒的瞬态追踪很有研究价值.尽管上述模型可以在瞬态流场中追踪颗粒,但学者们在泵等叶轮机械内瞬态追踪颗粒的数值研究中多使用了另一种E-L耦合策略——CFD与离散元方法(Discrete Element Method, DEM)耦合.Huang等使用Fluent耦合DEM软件(EDEM)实现了离心泵内瞬态粒-液两相流动的研究,得到了泵内流场、颗粒体积分布与轨迹,阐明了泵内颗粒运动对泵扬程随时间变化的影响.Liu等则使用CFD仿真软件STAR-CCM+中的CFD-DEM耦合代码实现了旋转机械内的瞬态颗粒追踪,前者研究了离心泵输送盐溶液过程中瞬态流场内结晶颗粒的运动特征与分布,后者研究了粒子大小、粒子形状对单通道排污泵内流场与壁面接触力的影响.Li等同样采用Fluent 耦合EDEM的策略对两级深海提升泵中粗颗粒的瞬态运动进行计算,前者研究了不同转速下泵内叶片面上的压力以及颗粒分布情况,后者研究了颗粒在叶轮和扩散器内的位置分布、速度变化和运动轨迹等.
DEM通常采用Hertz-Mindlin接触模型处理颗粒的相互作用,对颗粒运动的求解精度高,但计算消耗也大,尤其是颗粒数量巨大的情况.研究者们在瞬态追踪泵内颗粒运动时选择计算成本更高的CFD-DEM耦合策略,除计算精度的考虑外,还因为前述的软件模型在叶轮等“瞬时运动域”内追踪颗粒时存在某些缺陷.以ANSYS Fluent为例,DPM在瞬动旋转域内存在壁面反弹模型与壁面碰撞判定的缺陷.李仁年等在动静域之间设定共形的内部连接面交界面,以“瞬态而不瞬动”的多参考系方法表征叶轮旋转而规避了该缺陷,在螺旋离心泵中实现了基于DDPM的磨蚀研究.本文则提出了一种利用自动执行脚本、自定义函数修正该缺陷的方法,以相对较小的计算消耗实现了疏浚泵内大量泥沙颗粒瞬态运动的数值求解.
1 模型与数值方法
某大型离心式疏浚泵使用闭式五叶片叶轮,吸口直径0.9 m,外径2.52 m,叶片为后弯式圆柱型,叶高0.435 m,包角90°.压水室为半螺旋型,进口直径2.65 m,流道宽度0.565 m,出口呈圆角矩形,截面积约0.434 m.整泵最大通流直径0.33 m,叶轮额定转速257 r/min,额定流量 12 000 m/h,清水工况下扬程77 m.该泵的外形照片及流域计算网格见图1,单元总数约226万.

相间曳力是粒-液两相因速度不同而产生的相互作用力,是泵内沙粒与水之间的主要作用力.DPM法仅考虑了流体对颗粒的单向曳力作用,适用于颗粒体积分数不超过10%的稀疏流动.疏浚泵工作时的粒相体积分数平均为20%,局部位置体积分数可达50%,在此类稠密流动中,沙浆流变特性变化、颗粒碰撞等因素可改变混合物对于泥沙固粒的携带能力.因此颗粒相体积分数对曳力的影响不可忽略.
为更彻底地修正该缺陷,本文提出了一种计算策略:使用多重参考系(Multi-Referencing Frame, MRT)处理叶轮域旋转,在相对速度参考系下瞬态计算流场并追踪颗粒.在每次叶轮域网格滑移更新时,同步旋转叶轮域内的颗粒群,使得在随后的颗粒追踪过程中,叶轮域内颗粒与壁面的相对位置关系正确,这样将同时修正碰撞判定与壁面反弹默认模型的缺陷.图4所示为该方法的具体执行步骤.
沙沟沟口开阔,平坦,有利于泥石流流出沟后堆积。沙沟下游出口段通过居民自建的排导渠与柏枝溪衔接。排导渠宽度约1.6m,净高为1.0~1.25m,排导条件总体上较好,但排导渠断面尺寸较小,本次泥石流暴发后基本於填,泥石流冲向居民房屋(图3)。
工程项目作为一个临时的组织体系而独立存在,为了实现企业的项目规划目标,只有提升物资采购的管理水平,才能全面有效地保证工程项目建造的物资资源的精准供给。规范物资的采购机制,应用计算机、网络技术及电商平台等手段,缩短物资采购周期,降低采购成本;将工程建造过程与物资供应过程无缝对接,尽可能地减少库存、消除二次搬运,避免停工待料的情况发生,避免物资延误生产的事件发生,进而达到精准物资供应管理。

上述方程中所涉及的曳力传递系数采用了通过自定义函数构造的考虑了颗粒体积分数影响的Huilin-Gidaspow相间曳力模型:
(1)
式中:、分别为粒相的体积分数和密度;为Eulerian描述的粒相速度;为时间;、、分别为液相压力、速度及密度;为固相压力;为粒相黏性应力张量;为重力加速度;为相间曳力传递系数.由此得到Eulerian描述的泵内粒相运动及分布情况.再用Lagrangian描述的DPM法瞬态追踪颗粒速度,颗粒运动方程为

(2)
(-)+(-)

(3)
式中:、分别为液相体积分数和动力黏性系数;为颗粒直径;为模型转换系数;为颗粒雷诺数.
=()
使用SST-(为湍动能,为比湍流耗散率)模型处理泵内两相湍流,忽略粒相所受的升力、虚拟质量力及湍流耗散力等,颗粒撞壁反弹过程采用Grant等提出的模型求解:
(4)
为了对壁面反弹模型进行修正,可通过宏函数 DEFINE_DPM_BC 来修改粒子反弹边界条件:在粒子撞击壁面瞬间,根据颗粒位置计算其相对壁面的速度矢量,利用式(4)计算颗粒反弹后相对壁面的速度,再求得反弹后的绝对速度,重新赋值给碰撞后的粒子并返回颗粒状态.
2 DPM的缺陷与修正
ANSYS Fluent在绝对速度参考系下使用滑移网格技术旋转叶轮实现泵内瞬态计算,若忽略叶轮内部磨损造成的流道变形,则每一时间步内,叶轮域网格绕泵轴旋转一定角度而单元形状不变.DPM的瞬态追踪技术同样在绝对参考系下求解粒子与流体之间的相对速度,可正确处理粒子在运动域内的运动,但在计算粒子壁面反弹时忽略了壁面速度,在壁面碰撞判定时因网格基于显式算法更新位置而导致颗粒位置更新错误.本研究利用自动执行脚本、自定义函数修改了粒子瞬态运动轨迹的计算流程及DPM中的相关设置,直接或间接地修正了这些缺陷.
2.缺乏系统的制度管理工作。内部控制建设成果的表现之一就是固化的管理制度,系统化的管理体系有利于建立高效的内部控制体系。我国公立医院虽然建立了许多适合医院经营的制度,但是建立的制度缺乏系统化的管理。医院各部门权责不明,各部门之间的协作性不高,部门的效率低。缺少制度化、系统化的制度管理部门,制度缺乏严谨性,不利于科学化、系统化的内部控制体系建设。
2.1 壁面反弹模型
DPM默认忽略壁面运动,直接使用粒子速度处理碰撞反弹模型.在相对参考系下(稳态计算)追踪粒子时,叶片等壁面相对于叶轮的速度为0,求得的粒子速度即为相对速度,可直接求解其撞击壁面后的反弹速度.在绝对参考系下(瞬态计算)追踪粒子时,旋转的叶轮壁面具有速度,处理粒子撞壁反弹问题时本应采用其相对于壁面的速度,却错误地使用绝对速度.考虑到叶片表面的法向速度不为0,粒子撞击叶片后法向反弹速度必然存在谬误,如图2(a)所示;而对于法向速度为0、只具有切向速度的叶轮盖板内表面,如撞击过程不是完全弹性的(即≠1),则切向反弹速度会出现错误,如图2(b)所示.
由于自动控制领域的技术更新速度较快,市场对自动化智能装配的需求量越来越大,同时要求也越来越高。目前,受制于成本和技术难度等,手动或半自动化装配在广大中小企业仍然比较普遍,这造成了人力成本在整个生产成本里所占比重较高,本课题设计的自动螺丝机装配控制系统,将装料、送料、安装、定位、故障检测等全部进行自动化处理,可以大大减少人工投入,提高生产效率,增强企业竞争力。

式中:为反弹速度恢复系数,下标n、t分别表示法向、切向;为颗粒撞壁瞬间速度方向与壁面切向的夹角,最大值π/2.
现在好像只有很少的动车还有那种面对面的位置了,一举改变了我国人民坐火车热爱打扑克牌乃至麻将的习俗。小时候上火车,车厢里总是烟雾缭绕,乌烟瘴气,充满吆五喝六的打牌声和满地洋洋洒洒的瓜子壳橘子皮。列车员拿着扫帚和簸箕,一会儿过来扫出一大堆。现在虽然偶有“霸座”或者开外放看片、大声打电话之类不文明现象被爆出来,其实比起满车厢各种垃圾的年代,客观地说,还是有很大进步。
2.2 壁面碰撞判定
采用DPM单向耦合算法追踪颗粒时,单个时间步内的计算步骤依次如下:① 更新网格;② 求解瞬时流场至收敛;③ 根据流场计算颗粒受力;④ 颗粒追踪至当前时间步结束;⑤ 至下一步.图3所示为叶片运动导致的DPM碰撞判定缺陷,若上一时间步结束时粒子已经贴近叶片压力面,当下一时间步开始时,叶轮流体网格先旋转一定角度来更新叶片位置,此时粒子与叶片的相对位置改变,使得颗粒可能在进行追踪操作前(即未进行碰撞时间的计算与判定)而直接出现在叶片内.为解决这类问题,Fluent 会将此类粒子位置重新定位到最近的流体网格单元的中心.若粒子原位置更接近叶片吸力面侧,则会导致粒子“穿越”叶片出现在吸力面侧的谬误.

叶轮域网格滑移导致的颗粒碰壁判定缺陷难以单纯地通过宏函数进行修正,因为在网格更新阶段,流场计算结果尚未在当前流体计算时间步内收敛,而颗粒位置依然是上一流体时间步的结果,颗粒重定位发生在颗粒追踪环节之前,没有宏函数能直接修正该过程.减小流体域计算时间步长,即减小单次网格位移距离可以减少此类错误,但增加了计算的时间成本,而且粒子的重新定位一定程度上降低了颗粒追踪精度.
这类路口的问题,受影响的主要要素不是支路辅道而是干道的交通持续增加,或者外围大交通把主要交通流引入到这类节点引起的. 这种冲突不是规划有问题,而是周边变化要求这类节点顺势而动采取相应措施来解决. 通常采取的措施是空间改善,即路口的渠化展宽,但受到有限的红线资源影响,效果并非很理想,而且路口展宽路导致交织车道更多,而实际有效车道服务水平并不能有效解决拥堵问题. 其次,采取的措施是时间改善,时间改善指的是增加左转或者左转右置的交通组织模式,但司机驾乘人员适应这种交通组织模式的周期长,同时交织也同样存在,其有效绿信比并不突出,实际效果延误或者排队仍然存在.
假设泥沙为直径0.8 mm的球形石英颗粒,吸入泥沙的体积分数为20%,采用隐式算法追踪约16万个从吸口均匀入射的粒子包来代表数亿的真实沙粒.为实现高浓度沙浆中相间曳力的双向耦合,先视固粒为拟流体相,使用粒-液两相流动模型瞬态求解疏浚泵内的沙浆流动,粒相动量方程为
例8的这个标题运用头韵、尾韵、排比等修辞手段将强保护水平的专利法律制度所可能导致的人权困境非常形象地揭示出来了。即,如果不受限制的专利权保护将导致人类无法应对传染病等疾病蔓延。同时,该标题简短醒目,直指论文的主旨——专利制度的合法性和道德性。

图4中,修正策略需要结合使用自定义宏函数与自动执行脚本,过程中存在所有颗粒输出与使用文件格式重入射的步骤,这是受制于Fluent的程序机制,DEFINE_DPM_SCALAR_UPDATE以及 DEFINE_DPM_OUTPUT 等DPM宏函数均无法在时间步长的最后时刻(即颗粒处于当前时间步结束时的终位置时)执行,因此无法通过宏函数直接实现旋转域内颗粒位置的迁移.方法执行时,“更新(旋转)叶轮域网格与流场”步骤通过TUI命令单独激活叶轮域并旋转它的方式来实现,但原来的动静交界面被抑制再激活后功能失效,需要重新定义.
该方法可以理解为将颗粒的真实速度分解为相对运动域的速度和域速度,先在流体时间步长上与运动网格同步执行域速度的积分,随后再以粒子追踪的亚时间步执行相对叶轮运动速度的积分,并在此过程中实现颗粒的碰撞与反射.与真实碰撞相比,该方法虽然强制将粒-液耦合时的流场,以及粒子通过动静交界面时的叶轮位置固定在了流体时间节点上而产生了一定的误差,但在颗粒追踪过程中,粒子与叶轮壁面的相对位置、相对速度均与真实情况非常贴近,保证了较高的求解精度.
3 数值结果与分析
设定泵在额定流量及额定转速下工作,根据上文所述数值模型求解了两相流场,并对比了不同修正策略下的颗粒轨迹追踪结果.
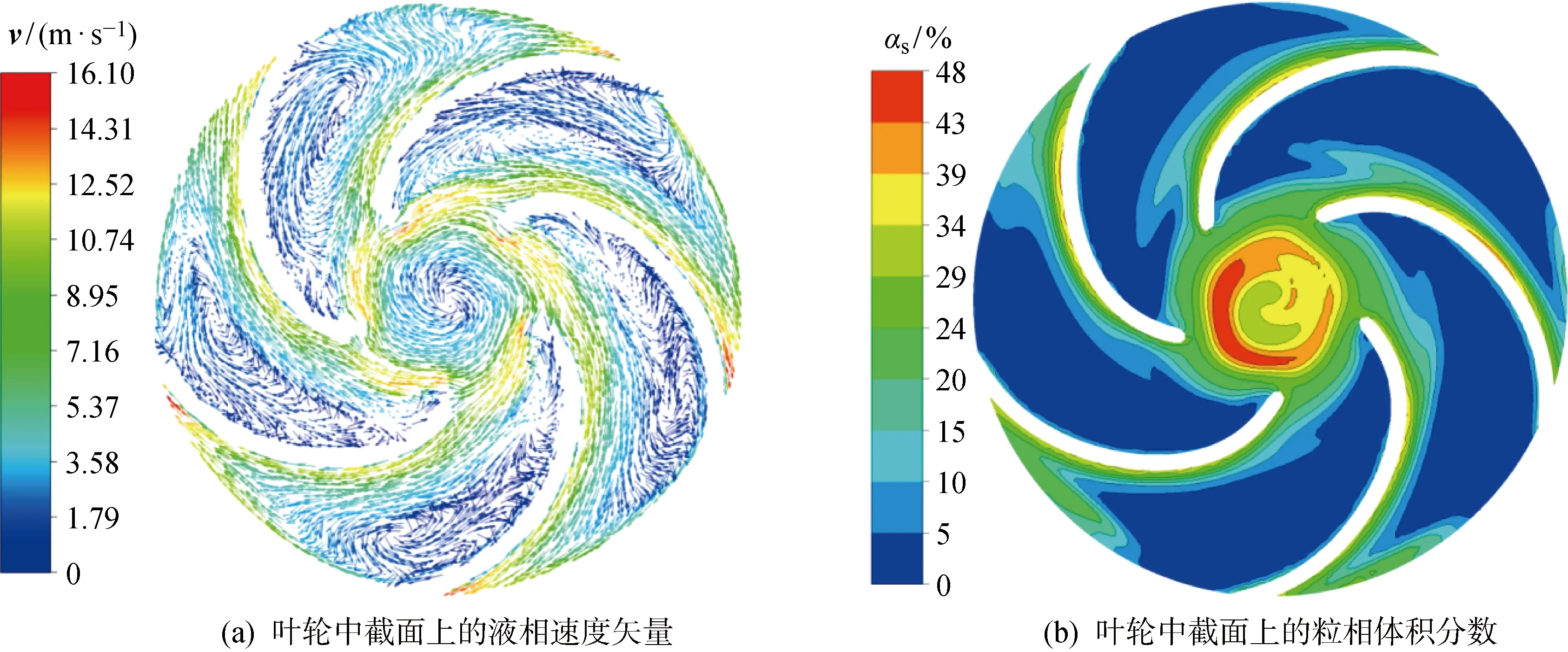
图5所示为粒-液两相流场计算得到的叶轮中截面上的液相相对速度及粒相体积分数.该泵为保证大块固岩的通过能力,随着径向高度增加,叶片宽度不减小,过流面积扩张严重,且叶片中后部负载较大.因此,图5(a)中叶片吸力面侧的流动在60%径向高度附近因逆压梯度过大而脱离叶片表面并在流道中部形成回流涡,更大径向高度处叶片压力面侧的高能流体则向吸力面侧扩散.受此周向二次流动的影响,因惯性较大而在叶片进口处集体偏向压力面侧的一部分固粒被液相带动,在叶轮出口附近向吸力面侧扩散,如图5(b)所示.
分别使用修正壁面反弹、修正壁面反弹并减小时间步长,以及按图4所示同时修正碰撞判定和反弹的3种方式求解泵内泥沙固粒的瞬时运动.图6所示为3种计算方式下得到的泵内颗粒分布情况.
图6(a)与图6(c)的计算时间步长均为 0.002 594 s,即每步叶轮旋转约4°, 而图6(b)的时间步长仅为其他步长的1/4.可见,当使用较大的时间步长时,若先旋转叶轮再追踪粒子,原本贴近叶片压力面侧的许多颗粒容易因碰撞判定缺陷而被错误地安置在吸力面侧,降低了粒子追踪精度,粒子距泵轴越远或叶片周向厚度越小,这种情况越严重,如图6(a).减小时间步长,即减小了叶片的单次周向位移,粒子更容易被重置在压力面侧,叶片背面的颗粒数量明显减少,但也未能完全避免,如图6(b).此时碰撞判定错误仍可能存在,且计算耗时成反比增加,约为图6(a)的4倍.若使用本文提出的求解策略,叶片压力面附近的颗粒将以正确方式撞击叶片并反弹,叶轮内颗粒先在惯性作用下偏向叶片压力面侧,并在出口附近因二次流作用而向背面扩散,如图6(c),该粒相分布情况与图5(b)最相近.与图6(a)相比,碰撞判定修正后的计算仅增加了图4所示的操作耗时,实际计算时间约为前者的1.2~1.3倍.
分别从图6(a)与6(c)的数值解中提取泥沙颗粒冲击泵内流道壁面时的位置及撞击速度矢量,使用文献[23]提出的沙粒冲蚀硬质合金的磨损模型估算叶轮内冲蚀的发生位置与磨损程度:

该模型以粒相体积分数20%为界,实现了Wen模型与Ergun模型的光滑过渡,可估算从稀疏到稠密直至浓度上限范围内的相间曳力.
分布式数据库是船舶分布式数据网络平台的重要组成部分,其优化程度对船舶数据管理效率有关键性影响。常见的应用于船舶上的分布式数据库是一种关系型数据库,具有使用方便、易于维护和可用于复杂查询等特点。随着船舶数据量的不断增大,这种关系型数据库逐渐暴露出很多难以克服的问题。例如,随着船舶功能应用服务的多样化和精细化,数据库运行过程中的并发负载逐渐增大,若数据库无法承受如此高的并发量,可能会崩溃,导致用户数据丢失或受损。为满足智能船舶系统数据安全存储和管理的需求,数据库应具有高可用性、高性能、自治与集中相结合的控制结构等特点。
三是加强抗旱服务队能力建设。建立省、市、县级抗旱服务组织130多个,乡镇村级类防汛抗旱服务组织500多个,充分发挥了服务队在抗灾减灾中的作用。
(5)
()=(sin)0843 7[1+343(1-sin)]0753 4

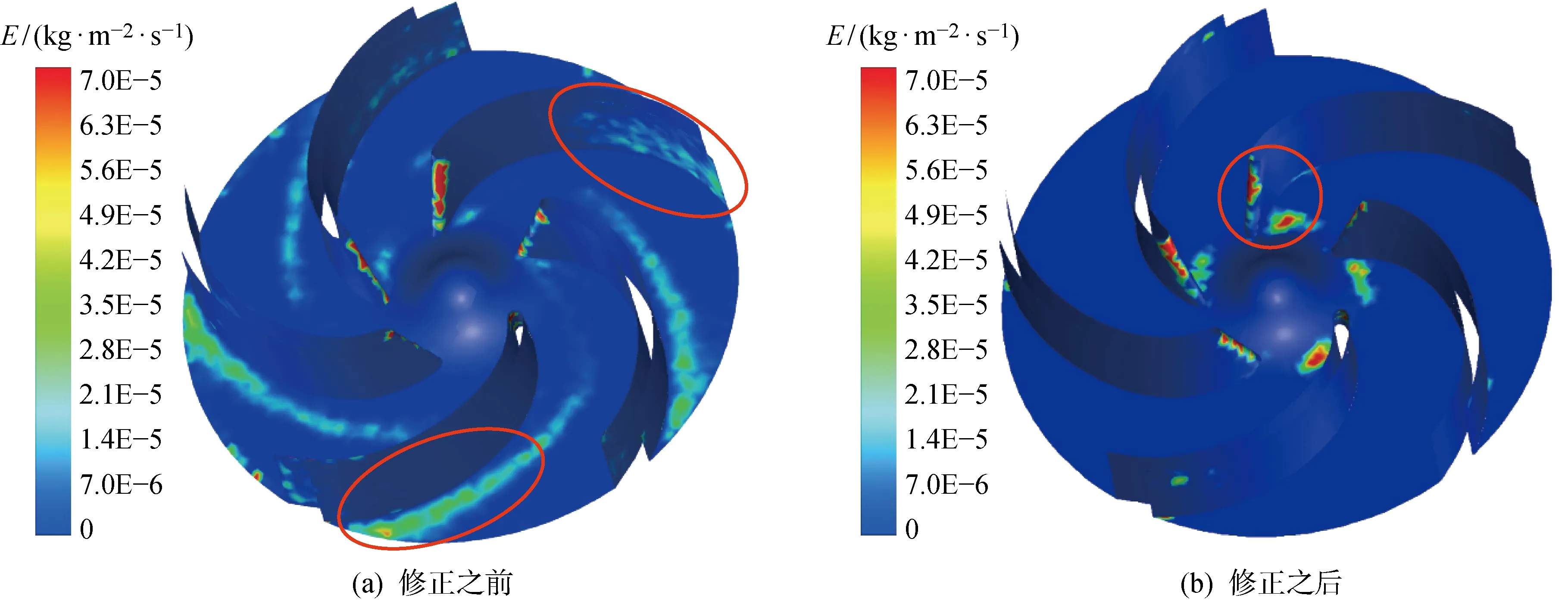
式中:为冲蚀率;()为角度相关函数;为沙粒垂直撞击壁面时造成的磨损.图7所示为叶片表面与叶轮后盖板面上冲蚀磨损率的对比.
预测叶轮磨损率峰值在7×10kg/(m·s)以上.图7(a)为碰撞判定修正前的结果,磨损最严重的区域位于叶片前缘,其次为叶片尾缘吸力面侧以及后盖板面上接近叶片压力面侧的部位.图7(b)为碰撞判定修正后的结果,磨损主要位于叶片前缘的偏前盖板侧,其次位于后盖板面上靠近叶片前缘背面处,少量磨损位于叶片尾缘压力面侧.后者与图8中叶轮流道内真实磨损的发生位置与相对程度非常接近,佐证了本文发展的颗粒追踪数值方法具有更高的精度.
经过十余年故纸堆中的生活,我有了把握,看清了我们这民族,这文化的病症,我敢于开方了。方单的形式是什么——一部文学史(诗的史),或一首诗(史的诗)……不用讲今天的我是以文学史家自居的,我并不是代表某一派的诗人。[2]380-382

观察泥沙的颗粒轨迹可以发现,沙粒进入旋转叶轮后在曳力作用下与周围水流保持近似速度,当水流受壁面约束而速度突然变化时,沙粒因惯性较大,速度转变较慢,容易撞击附近约束流动的壁面,是叶轮内磨损的主要原因.参考颗粒运动合理设计叶轮内流道,均匀加载约束载荷可在一定程度上缓解磨损的局部加剧.
4 结论
本文讨论了一些流体力学软件在运动网格域内颗粒追踪求解时的缺陷,针对ANSYS Fluent软件中的DPM提出了一种修正方法,实现了疏浚泵内颗粒轨迹更高精度的瞬态追踪,得到的主要结论有:
(1) DPM法适用于稀疏流动中的颗粒追踪,在颗粒受力计算时引入由E-E两相流动求解得到的粒相体积分数以及从稀疏到浓稠均适用的Huilin-Gidaspow曳力模型,可提高DPM在浓稠流动中追踪固粒的精度.
(2) 在运动域内追踪粒子时,将网格、颗粒依次运动求解过程转变为网格与颗粒先同步运动,再求解颗粒相对运动的过程,避免了DPM中颗粒在运动壁面上碰撞判定及反弹速度计算的错误.
(3) 修正算法得到的疏浚泵叶轮内冲蚀磨损的数值结果与真实情况接近,且泥沙颗粒对叶轮内壁面的碰撞预测结果合理地解释了叶轮内磨损发生的原因,为疏浚泵的耐磨改进等相关研究提供了有力参考.
ANSYS Fluent软件中考虑粒子间碰撞作用的DDPM具有类似DPM的缺陷,后续工作可引入不同粒径分布、粒子包碰撞等计算设置,实现基于DDPM的粒-液耦合算法修正.
