
八车道高速公路可变信息标志前置距离对驾驶行为的影响
2022-06-06 14:21:26荆迪菲宋灿灿郭忠印
同济大学学报(自然科学版) 2022年5期
荆迪菲,宋灿灿,郭忠印
(同济大学道路与交通工程教育部重点实验室,上海 201804)
随着我国机动车保有量的激增和高速公路机动化出行需求的增加,早期建设的高速公路已经不能适应剧增的交通量。新建[1]与改扩建[2]八车道高速公路大量涌现,如沈大高速、京台高速、滨莱高速、京沪高速等,我国八车道高速公路的比例不断攀升。除扩大路网规模外,在既有交通需求和供给下,通过动态路径诱导方法来规避大面积区域拥堵,实现交通流的合理分布,是高速公路管理部门最为青睐的策略[3]。
可变信息标志(variable message sign,VMS)是交通诱导系统中信息发布系统的重要组成部分,依交通、道路、气象等状况变化向驾驶员提供实时的下行交通时空信息[4],通常安装在高速公路和主干路网的关键位置[5]。VMS 的版面形式、诱导内容以及合理布设是实现有效路径诱导和保障道路安全的基础,目前关于VMS布设的研究大多集中于路网环境下VMS的布设密度与选址。Abbas等[6]通过确定性排队模型估算车辆延误时间,以交通量转移至绕行路线产生车辆延误最小为原则优化VMS 选址。Chiu等[7]、李小强[8]、王建军等[9]以行车安全、通行效率、环境能源等为目标函数,构建双层VMS 选址规划模型。八车道高速公路车道数增多促使车辆运行速度加快、横向换道距离成倍增加[10]。由于起到路径诱导作用的VMS 要传递比普通交通标志更多的信息,因此驾驶员需要在更短的时间内完成VMS视认、路径决策、车辆减速与换道,达到实时优化行驶路径的目的[11]。VMS前置距离设置不当,不仅影响诱导信息的可读性、指引性,还诱发超速行驶、急换道等危险驾驶行为。我国目前尚未提出关于VMS前置距离的规范,现有的《道路交通标志和标线》(GB5768―2009)[12]和《高速公路LED 可变信息标志》(GB/T 23828―2009)[13]仍旧缺少这方面的具体内容,未制订具体的可执行的条款,使得工作人员在实践中对VMS的位置设置无据可依。
多位学者[14-16]基于理论模型和交通仿真实验对VMS前置距离展开研究,但理论模型往往具有多重假设并简化了驾驶行为,基于动力学模型的交通仿真实验与真实驾驶行为存在差异。以上研究方法均无法体现速度区域性变化特征以及驾驶员对某种前置距离的接受程度。同时,经VMS诱导后的换道行为属于强制换道,与自主换道行为存在较大差异,理论模型与交通仿真实验均难以反映,结论具有局限性。因此,在VMS 投入使用前,应从驾驶行为角度出发研究VMS前置距离对驾驶行为的影响。
国内关于VMS 前置距离对驾驶行为影响的研究尚属空白,而驾驶行为作为直接诱发交通事故的主要原因,综合剖析VMS前置距离对驾驶行为的影响规律是解决VMS 优化设置问题的基础。王昊程等[17]、张云娇[18]研究了八车道高速公路出口预告标志前置距离对驾驶行为的影响,但VMS与出口预告标志在功能属性、信息量、版面形式等方面存在显著差别,驾驶员对两者进行视认时的车辆操控行为、视认行为、生心理指标变化存在显著差异,因此基于出口预告标志得出的结论不适用于VMS 前置距离对驾驶行为的影响规律。
驾驶模拟实验具有能有效控制实验变量、全方位获取实验数据、实验场景可重复和成本效益较高等优点,越来越多地应用于交通安全领域的研究。Wade等[19]指出,虚拟驾驶的车辆轨迹特征与实车行驶车辆轨迹特征无明显差异。Bella[20]、McAvoy等[21]、毛喆等[22]对驾驶模拟实验数据进行了物理验证和行为验证,认为实验数据具有绝对有效性或相对有效性。赵晓华等[23]、Charlton[24]、Vest等[25]、Ding等[26]均通过驾驶模拟实验基于运行车速指标分别研究了警告标志、线形诱导标志、频闪灯、减速标线的减速效果。Godley 等[27]与Jamson 等[28]均验证了驾驶模拟实验在标志标线设置效果研究方面的相对有效性。因此,采用驾驶模拟实验研究不同VMS前置距离下的驾驶行为具备合理性。
综上所述,不同VMS前置距离对驾驶行为的影响尚不清楚。采用驾驶模拟实验,以换道过程中的方向盘操控行为、换道行为、减速行为为研究对象,解析不同VMS前置距离下的驾驶行为,为八车道高速公路VMS前置距离的优化设计提供参考。
1 实验方案
1.1 实验仪器
采用如图1所示的ScaNer Studio驾驶模拟仿真平台,该平台可提供沉浸式驾驶模拟环境,采集数据种类丰富且数据量大,采集频率设置为50 Hz。

图1 ScaNer Studio驾驶模拟仿真平台Fig.1 ScaNer Studio driving simulation platform
为确保驾驶模拟实验的有效性和驾驶模拟数据的真实性,要求被试驾驶员评估实验环境、实验场景、速度感知、加速器、方向盘和踏板性能的真实度,真实度满分10 分,分数越高表明场景越真实[29-30]。评估结果如表1 所示,表明该驾驶模拟实验具有很高的真实度,与实际交通场景的差异甚微。

表1 驾驶模拟实验真实度评估结果Tab.1 Reality evaluation results of driving simulation experiment
1.2 实验场景
实验场景线形以京台高速为蓝本进行设计,场景的主线设计速度为120 km·h−1;场景中共设3个互通立交,减速车道起点限速为90 km·h−1,匝道限速为60 km·h−1,互通立交类型与京台高速一致。为减小实验路段长度,将互通立交间距缩短为6 km,调整之后的互通立交选位符合《公路立体交叉设计细则》(JTG/T D21―2014)[31]中关于互通立交路段主线平纵面线形指标的要求。场景全长约17.9 km,场景示意图如图2所示。
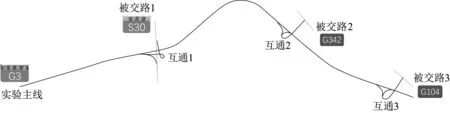
图2 场景示意图Fig.2 Simulated freeway
为了尽可能减小线形对标志视认产生的影响,纵断面采用了平坡。横断面采用双向八车道,车道宽度3.75 m,右侧硬路肩3.00 m,横断面参数如图3所示。

图3 道路横断面(单位:cm)Fig.3 Cross section of road(unit:cm)
场景中的交通标志按照京台高速的设计方案设置,在互通立交出口处增设VMS,VMS均以龙门架支撑于直线路段,减速车道起点前的主线设置可跨越同向车道线,驾驶员可自由变道。VMS 的原始尺寸为600 cm×500 cm,字高60 cm,VMS下边缘距路面550 cm。驾驶模拟实验场景及VMS版面如图4所示。
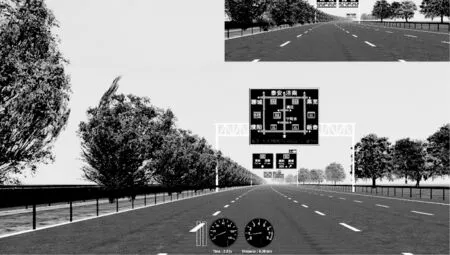
图4 驾驶模拟实验场景Fig.4 Scenario of driving simulation experiment
基于前述文献,考虑到静态指路标志协调性,设置3.0、2.5、1.5、0.7 km 4种VMS前置距离。为避免驾驶员对实验出现学习效应,各组实验中VMS版面形式相同,但展示的前方交通状况和路径诱导信息不同,各前置距离下的VMS版面及布设位置如图5所示。
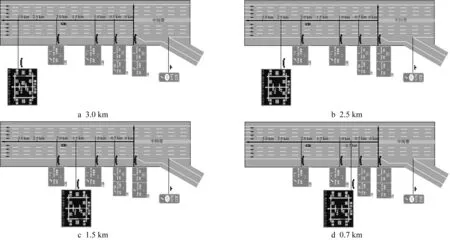
图5 不同前置距离的VMS布设Fig.5 VMS layout with different frontal distances
1.3 实验驾驶员
实验公开招募驾驶员32人,男女比例2∶1,性别比例和年龄分布均符合2020年度中国驾驶人统计特征[32]。所有受试者的视力或矫正后视力及听力均正常,并都持有C1驾照,被试驾驶员的平均年龄34.2岁(标准差12.1岁),平均驾龄8.9年(标准差7.2年)。
1.4 实验流程
为避免模拟器操作熟练程度对驾驶员的影响,在模拟器自带场景中驾驶员操作模拟器20 min后进行正式实验。实验开始前告知驾驶员单次实验目的地,并将实验路网地图给被试驾驶员观看5min。实验过程中,驾驶员驾驶小客车按限制速度在最内侧车道行驶,驶往要求目的地,行驶过程中VMS 提示前方交通状况并给出路径诱导信息,驾驶员根据自身对路网及VMS的理解自由规划路径,驾驶员驶出京台高速时实验结束。
1.5 数据预处理
选取驾驶员视认完VMS 后驶出高速的过程为研究单元,对不同VMS前置距离下驾驶员的方向盘操控行为、换道行为、减速行为进行深入分析。基于车辆横向位置对车道换道起终点进行判别以提取换道过程,变道起止点和越线点的识别如下所示:

式中:y'i为时刻i的车辆横向偏移率,m·s−1;yi为时刻i的车辆横向位置,m;yL为车道线的横向位置,m。
2 方向盘操控行为分析
驾驶员对方向盘的操控可以反映驾驶员转向过程中的紧张程度、方向盘操作的难易程度以及方向盘操作的驾驶负荷。根据驾驶员换道过程中的方向盘操控行为数据,构建方向盘转角幅值θ、方向盘转角速率θ̇、方向盘操纵负荷度h指标。
2.1 方向盘转角幅值
方向盘转角幅值θ为换道过程中方向盘最大转角和最小转角的差值,可有效表征驾驶员换道时的紧张程度,θ与驾驶员的紧张程度正相关。不同VMS 前置距离下θ箱形图如图6 所示。VMS 前置距离为1.5、0.7 km时,θ均值、离散程度大并存在极端值,表明该前置距离下驾驶员需大幅开合方向盘才能完成换道操作,行车稳定性低;VMS 前置距离为3.0、2.5 km时,θ均值和离散程度较小,表明该前置距离下驾驶员可从容完成换道。
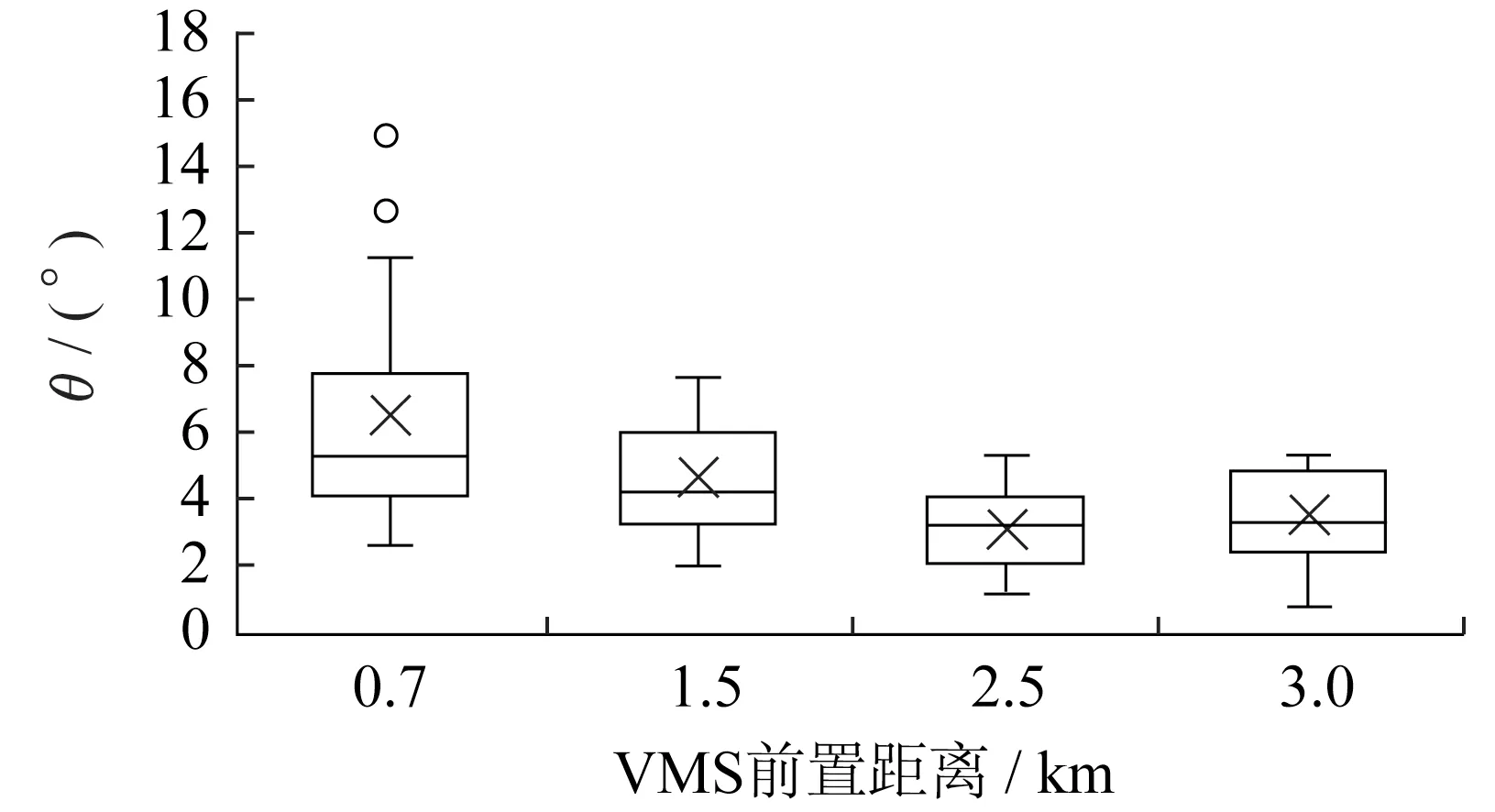
图6 不同VMS前置距离下换道时θ箱形图Fig.6 Boxplot of θ when changing lanes under different VMS frontal distances
采用单因素方差分析。Shapiro-Wilk 正态检验发现p>0.05,样本为正态分布;方差齐性检验发现p>0.05,样本的总体方差齐。方差分析结果表明,VMS 前置距离对方向盘转角幅值影响显著(p<0.001)。多重比较发现,VMS 前置距离为1.5、0.7 km 时与VMS 前置距离为3.0、2.5 km 时的组间存在显著性差异,组内不存在显著性差异。
2.2 方向盘转角速率
方向盘转角速率θ̇为换道过程中单位时间内方向盘转角改变值,可有效表征驾驶员换道的难易程度,θ̇与换道难易程度正相关。不同VMS 前置距离下θ̇箱形图如图7 所示。VMS 前置距离为1.5、0.7 km时,θ̇均值和离散程度大,表明该前置距离下驾驶员需频繁调整方向盘才能完成变道;VMS前置距离为3.0、2.5 km时,θ̇均值和离散程度较小,表明该前置距离下驾驶员能够较容易地完成换道。
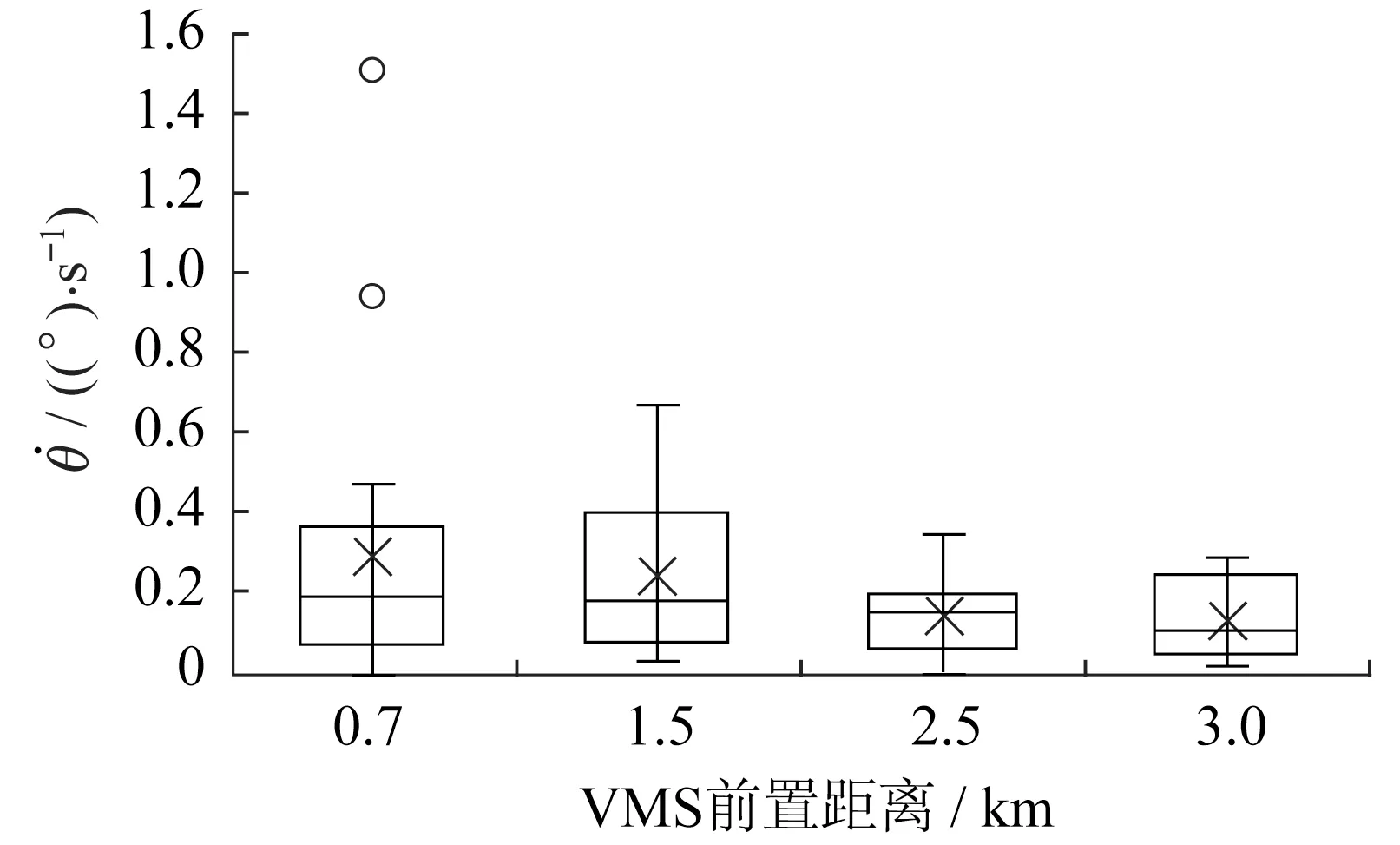
图7 不同VMS前置距离下换道时θ̇箱形图Fig.7 Boxplot of θ̇ when changing lanes under different VMS frontal distances
采用单因素方差分析。Shapiro-Wilk 正态检验发现p>0.05,样本为正态分布;方差齐性检验发现p>0.05,样本的总体方差齐。方差分析结果表明,VMS 前置距离对方向盘转角速率有显著影响(p<0.001)。多重比较发现,VMS 前置距离为1.5、0.7 km 时与VMS 前置距离为3.0、2.5 km 时的组间存在显著性差异,组内不存在显著性差异。
2.3 操控行为负荷度
当VMS前置距离不足时,驾驶员倾向于通过大角度开合方向盘进行紧急换道,使得驾驶负荷显著提高。驾驶员持续在较高负荷下驾驶车辆易造成驾驶员决策、操纵失误或激进,影响道路交通安全[33]。采用由方向盘转角信号的低频分量构造的方向盘转角功率h表征驾驶员换道过程中的驾驶负荷。h与驾驶负荷正相关。
图8为d1~d8小波降噪效果对比。如图8所示,经Daubechies 7 阶小波去噪后的数据能较好地保持原始数据形状,数据信号曲线不会出现失真。因此,采用Daubechies 7 阶小波对方向盘转角信号进行分解重构,得到第7层低频分量,求其自相关函数并进行傅里叶变换得到功率谱,对功率谱密度函数在空间频域上进行积分求得第7层低频分量信号的平均功率h。
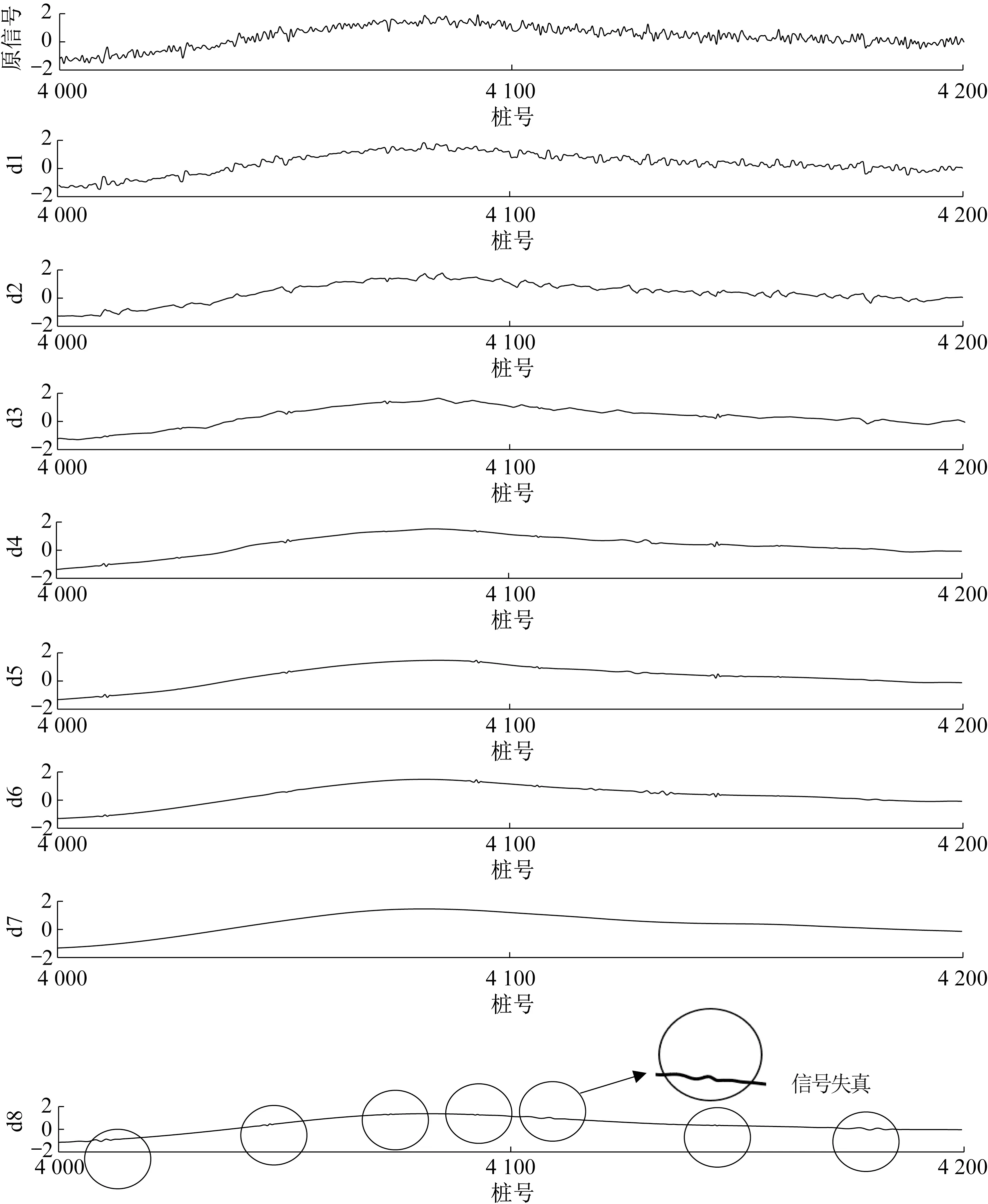
图8 d1~d8小波降噪效果对比Fig.8 Comparison of d1~d8 wavelet denoise effect
不同前置距离下h箱形图如图9所示。VMS前置距离为0.7 km时,h均值和离散程度大且存在极端值,表明该前置距离下驾驶员操控负荷较大;VMS前置距离为3.0、2.5、1.5 km时h均值基本相同,VMS前置距离为3.0 km时h离散程度较大,可能是由于驾驶员对VMS存在短期记忆[34],在较长的前置距离下部分驾驶员记忆出现一定衰减导致操纵负荷增大。
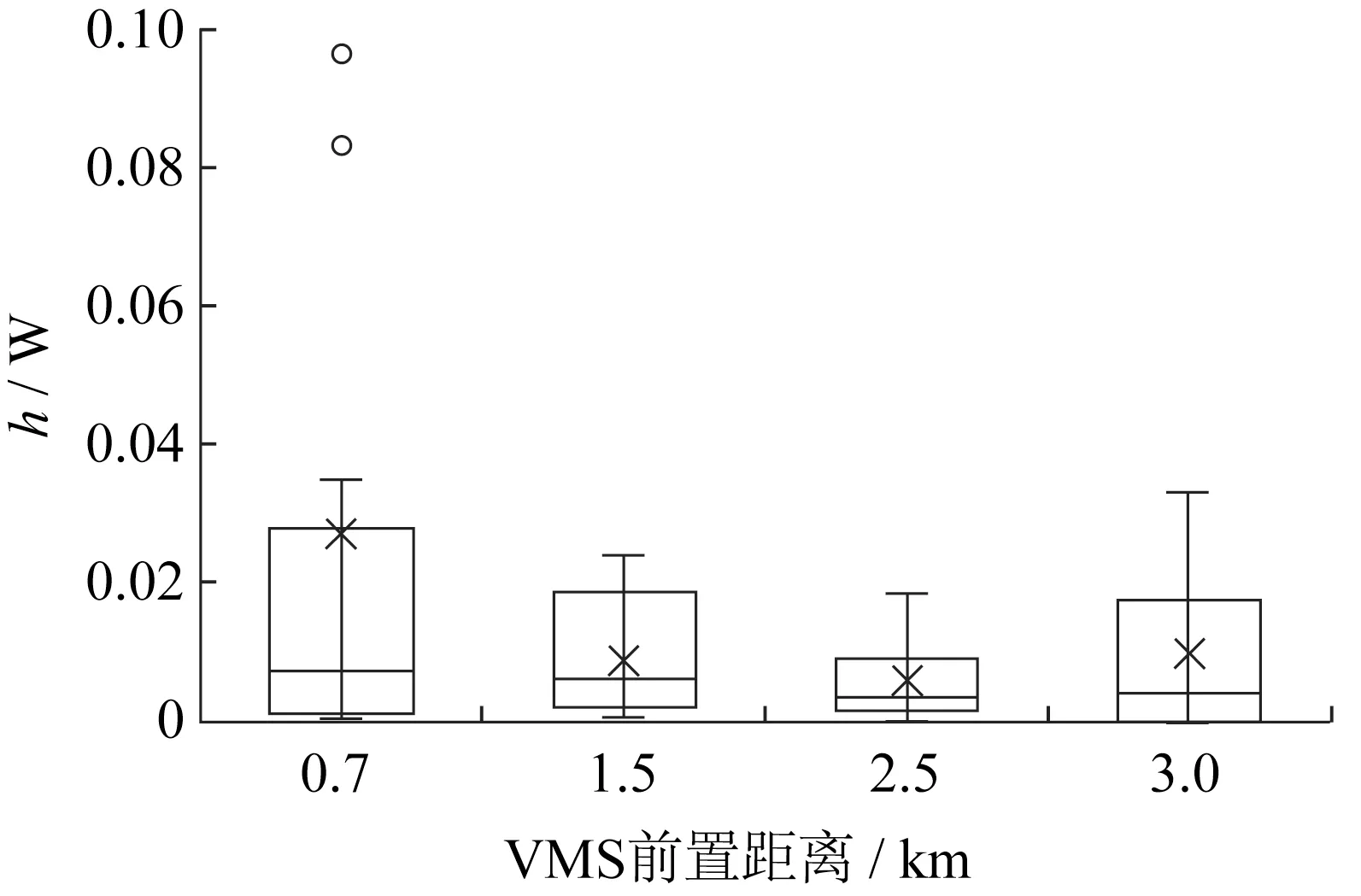
图9 不同VMS前置距离下换道时h箱形图Fig.9 Boxplot of h when changing lanes under different VMS frontal distances
采用单因素方差分析。Shapiro-Wilk 正态检验发现p>0.05,样本为正态分布;方差齐性检验发现p>0.05,样本的总体方差齐。方差分析结果表明,VMS前置距离对驾驶负荷有显著影响(p<0.001),各前置距离组间均存在显著性差异。
3 换道行为分析
VMS 的设置位置决定了驾驶员换道的空间范围,换道的紧迫性、规范性显著影响驾驶员的行车安全,因此VMS的设置位置应保证驾驶员具有能够从容、合法换道的空间。
3.1 换道紧迫性
不同VMS 前置距离下驾驶员的单次换道轨迹如图10所示。图10中实线为车道边缘线,虚线为同向车道分界线。VMS 前置距离为3.0、2.5、1.5 km时换道轨迹曲线具有较高的相似度;VMS前置距离为0.7 km时换道轨迹最陡,表明该前置距离下驾驶员行为激进。
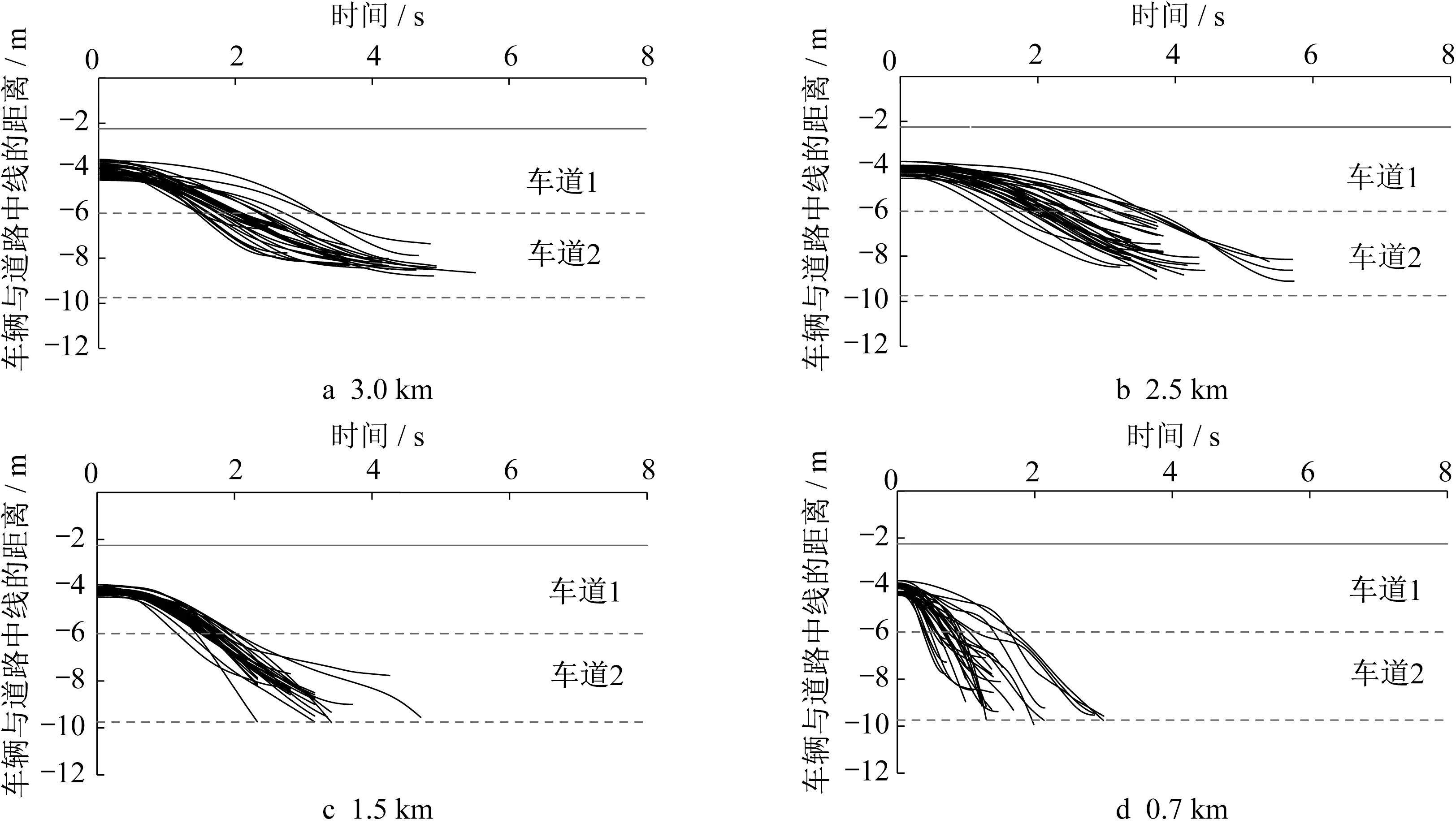
图10 不同VMS前置距离下单次换道轨迹Fig.10 Single lane changing trajectory under different VMS frontal distances
驾驶员换道轨迹可采用多项式轨迹模型[35]、三角函数轨迹模型[36]、双曲正切函数轨迹模型[37]进行拟合。双曲正切函数中各个参数具有明确的物理意义,因此选择该种函数进行轨迹拟合。双曲正切函数模型如下所示:
式中:x(t)为车辆与道路中线的距离,m;t为时间,s;Tc为单次执行换道时间,s,VMS 前置距离为3.0、2.5、1.5、0.7 km 时分别取平均值4.39、4.22、3.27、1.70 s;α和δ为与换道轨迹起终点横向位置相关的系数;τ为表征换道紧迫性的参数,|τ|越大表明换道情况越紧迫[37]。
采用双曲正切函数轨迹模型对单次换道轨迹拟合,用确定系数(R2)、均方根误差(βRMSE)表征拟合优度,结果如表2 所示。由表2 可知,在前置距离为0.7、1.5 km时,|τ|较大,表明该VMS设置点位靠近停车换道点位,驾驶员换道状态激进且轨迹离散程度高,影响行车安全性;前置距离为2.5、3.0 km时,|τ|较小,表明该VMS 前置距离符合驾驶员期望,为驾驶员提供了理想换道条件,换道轨迹缓和,驾驶员换道状态从容。

表2 单次换道轨迹拟合回归结果Tab.2 Regression results of single lane changing trajectory fitting
3.2 换道规范性
连续变换车道是高速公路上危险且违规的驾驶行为[38],即变换2个或多个车道间没有进行车身的回正。图11是驾驶员在不同VMS前置距离下的换道行为分布。由图11可知,VMS前置距离对驾驶员换道行为规范性存在不同程度的影响。VMS前置距离与规范换道率成正相关,即当VMS前置距离足够时,规范换道的可能性大。当VMS前置距离为2.5、3.0 km时,规范变道驶出概率高于90%,符合高速公路安全需求。当VMS前置距离为0.7 km时,驾驶员连续变换3根车道的意愿远强于连续变换2根车道或规范变道,这是由于VMS 设置点位于出口较近导致变道距离不足所致。
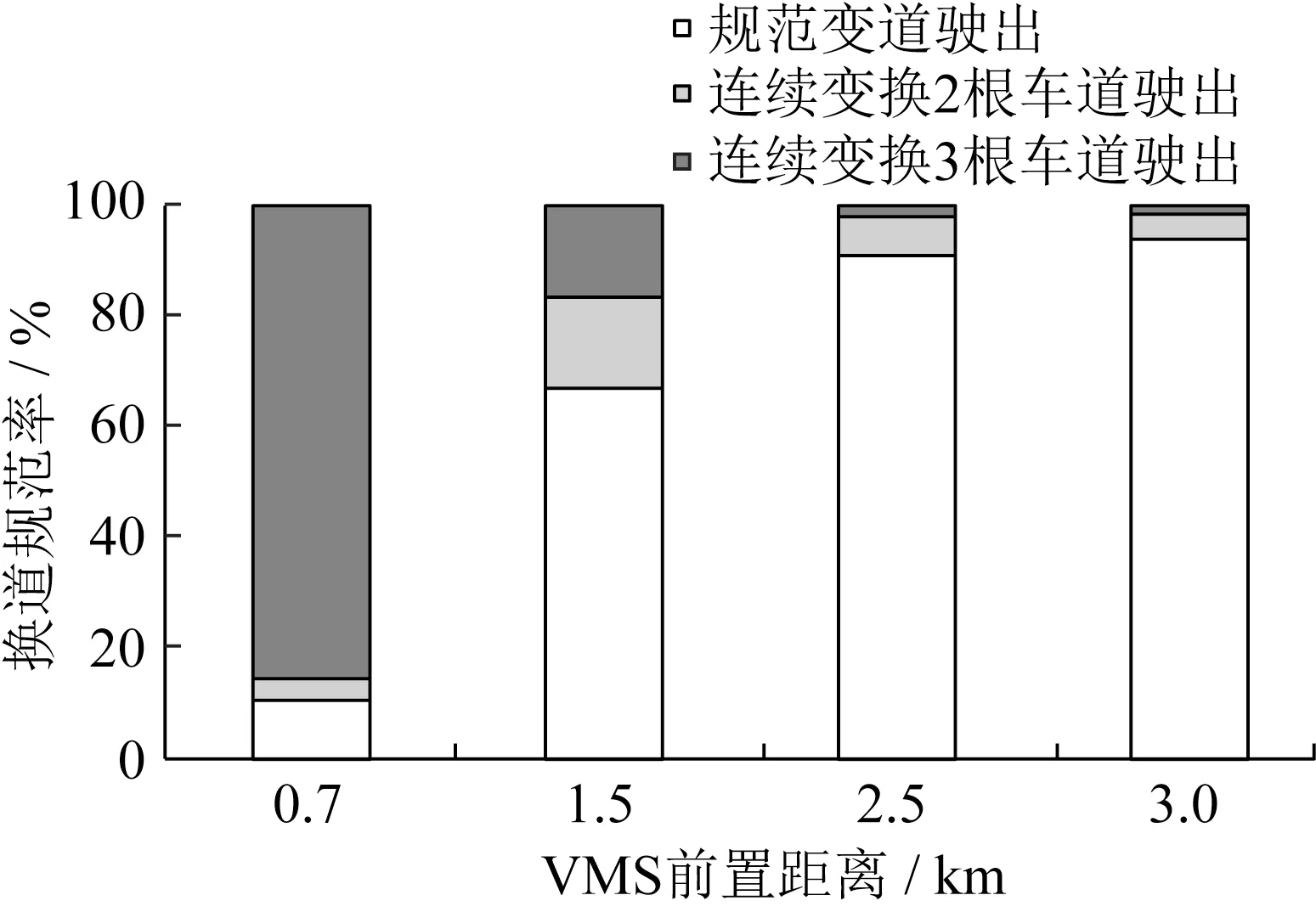
图11 不同VMS前置距离下的换道行为分布Fig.11 Lane changing behavior under different VMS frontal distances
4 减速行为分析
4.1 减速车道起点速度
VMS的设置使驾驶员做出临时驶出匝道、更换行驶路径的决策,但匝道的限速远低于主线的限速,通常在减速车道起点采用逐级限速的方式进行降速。为保障驾驶员能够安全驶出匝道,减速车道长度能够满足驾驶员的速度由减速车道起点限速降至匝道限速的要求,因此驾驶员能够在减速车道起点将速度降至限速就成为车辆能否将速度降至匝道限速的先决条件。因此,选择减速车道起点速度进行分析。
受VMS 诱导驶出高速的驾驶员在减速车道起点的车速箱型图如图12 所示。减速车道起点的限制速度为90 km·h−1。4 种VMS 前置距离下均出现驾驶员不同程度的超速现象。前置距离为0.7 km时,减速车道起点车速均值较高且存在极端低值,部分驾驶员以110 km·h−1以上的超高车速驶入减速车道,仅少数驾驶员能够达到限速要求,甚至存在驾驶员采取急刹车的危险驾驶行为使速度快速降至57.4 km·h−1,远低于70 km·h−1的匝道限速;前置距离为1.5 km 时,半数驾驶员达到限速要求;前置距离为3.0、2.5 km时,减速车道起点车速均值符合限速要求且离散程度较小,不存在极端低值,表明该VMS前置距离下驾驶员可从容完成减速。
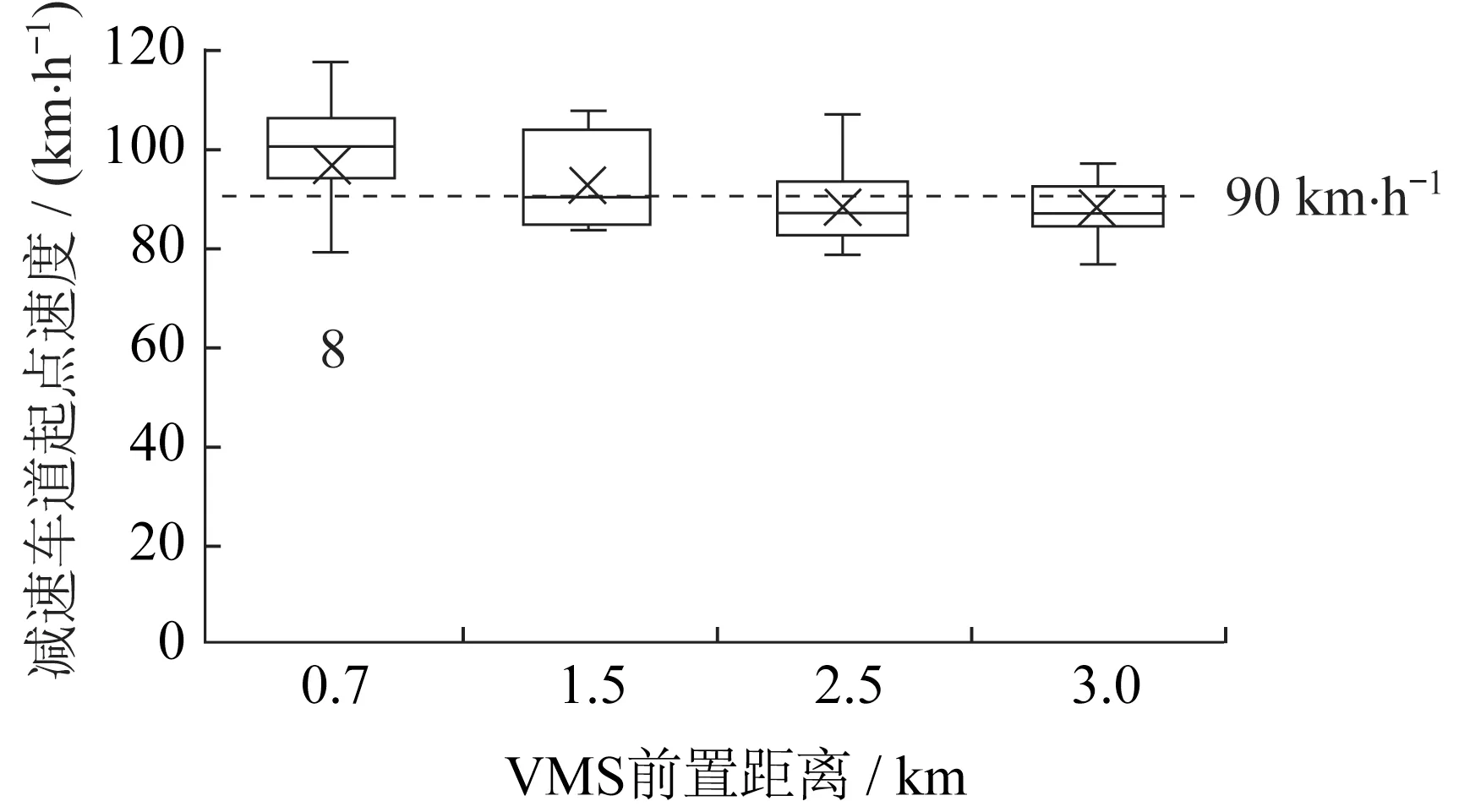
图12 不同VMS前置距离下减速车道起点车速箱形图Fig.12 Boxplot of the speed at the starting point of deceleration lane under different VMS frontal distances
采用单因素方差分析。Shapiro-Wilk正态检验发现p>0.05,样本为正态分布;方差齐性检验发现p>0.05,样本的总体方差齐。方差分析结果表明,VMS前置距离对减速车道起点车速影响显著(p<0.001)。多重比较发现,VMS前置距离为3.0、2.5 km时组间不存在显著性差异,其他组间均存在显著性差异。
4.2 减速与换道行为综合分析
4 种VMS 前置距离下换道、减速行为热力图如图13所示。由图13可知,4种VMS前置距离下的换道过程均伴随不同程度的减速。
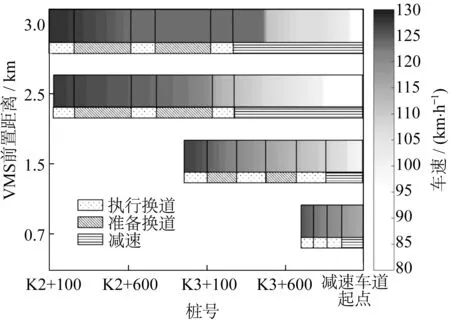
图13 不同VMS前置距离下换道、减速行为热力图Fig.13 Heat map of lane changing and deceleration behavior under different VMS frontal distances
驾驶员从最内侧车道驶向减速车道的过程中需进行3 次换道。VMS 前置距离为3.0、2.5 km 时的换道、减速行为相似,执行3次换道过程中车速稳定在120 km·h−1以上,换道间隙存在3 km·h−1内的小幅减速,完成3 次换道后在最外侧车道减至限速值90 km·h−1以下,驾驶员有充足的时间进行换道与减速,而且减速与换道2 种行为是依次进行的。VMS前置距离为1.5 km 时,驾驶员出现双重驾驶行为,即驾驶员采取制动措施降低车速的同时操控方向盘进行换道,执行换道过程中减速幅值达到8 km·h−1,该行为大幅增加了驾驶操作难度和负荷,极易诱发交通事故,但抵达减速车道起点时速度仍在100 km·h−1以上,没有达到限速要求。VMS前置距离为0.7 km时鲜有准备换道过程,表明迫于紧急的强制换道需求,驾驶员不惜采取违规连续变道、急换道等危险驾驶行为以实现快速变道,减速距离极短导致减速车道起点车速高达115 km·h−1,远超限制速度,不利于高速公路的行车安全。
5 结语
基于驾驶模拟实验,研究了八车道高速公路上不同VMS 前置距离对方向盘操控行为、换道行为、减速行为的影响。结果表明,VMS前置距离对驾驶行为存在显著影响。当前置距离不足时,迫于紧急的强制换道需求,驾驶员往往快速、大幅地转动方向盘,采取连续换道、急换道的行为以尽快达成换道目的。为顺利驶入减速车道,部分驾驶员在操控方向盘进行换道的同时采取制动措施降低车速,该行为大幅增加了驾驶操作难度和负荷,极易诱发交通事故。当VMS 前置距离过长时,部分驾驶员由于对VMS存在短期记忆,记忆出现一定衰减进而导致操控负荷增大。
由于VMS视认过程是一种多任务驾驶行为,驾驶员需在短时间内完成VMS 视认、路径决策、车辆减速与换道,因此应保证充足的距离让驾驶员完成换道并以限制速度驶入减速车道,提高驾驶员规范变道意愿,避免出现连续换道、急换道、减速换道等危险驾驶行为;同时应考虑驾驶员对VMS的短期记忆,避免因记忆衰减造成驾驶负荷,为驾驶员提供较为理想的换道条件。结合理论与实验分析结果、静态标志协调性,推荐八车道高速公路上的VMS安全前置距离范围为2 500~3 000 m,此时驾驶员有充足的距离进行自由换道,规范变道意愿高且换道状态从容,有利于高速公路驾驶安全性。
本研究仅对特定交通流背景下的4 种VMS 前置距离展开研究,后续应通过调整交通流参数、增加实验车辆类型,并融合其他驾驶生心理特征指标,对VMS的安全前置距离临界点展开研究。
作者贡献声明:
荆迪菲:实验设计,实验实施,数据处理分析,论文撰写。
宋灿灿:指导论文撰写,论文修改与定稿。
郭忠印:提供研究思路,论文审阅与定稿。
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
今日农业(2020年16期)2020-12-14 15:04:59
石油地质与工程(2019年3期)2019-09-10 08:27:54
知识经济·中国直销(2018年3期)2018-04-12 06:43:36
传媒评论(2017年8期)2017-11-08 01:47:36
解放军健康(2017年5期)2017-08-01 06:27:42
材料科学与工程学报(2016年2期)2017-01-15 13:34:44
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
中国海上油气(2015年3期)2015-07-01 16:32:04
交通建设与管理(2015年13期)2015-03-20 15:18:48
