
自动驾驶路测融合度建模与分析
2022-06-06 14:21赵丽影涂辉招汪大明宋晓航
同济大学学报(自然科学版) 2022年5期
鹿 畅,刘 颖,赵丽影,涂辉招,汪大明,宋晓航
(1. 同济大学道路与交通工程教育部重点实验室,上海 201804;2. 交通运输部规划研究院,北京 100028;3. 上研智联智能出行科技(上海)有限公司检测技术研究部,上海 201306)
世界各地大规模推进自动驾驶车开放道路测试(下文简称自动驾驶路测)[1],旨在验证自动驾驶车在不同道路场景中的可靠性、安全性和通行效率,促进自动驾驶技术的迭代成熟和规模化应用。自动驾驶路测融合度(即自动驾驶车在开放道路测试过程中融入现有道路交通系统的程度)受到广泛关注[2],美国加州[3]、中国北京[4]和上海[5]已先后发布自动驾驶路测报告。自动驾驶路测融合度不仅直接影响现有道路交通系统,还间接影响公众对自动驾驶技术的接受程度[6-7]。
自动驾驶路测融合度关键要素是路测车辆的安全性[2,8-9]。脱离率[10]是安全性的重要指标,包括平均脱离里程间隔(MPD)[11]和每1 000 英里脱离率[12]。MPD 反映自动驾驶车在无人工干预情况下平均每次脱离可连续行驶的里程。每1 000 英里脱离率反映自动驾驶车每行驶1 000 英里人工干预次数。通常认为脱离的频率越低,自动驾驶车的表现越好,与现有道路交通系统的融合度就越高。随着自动驾驶累计测试里程及累计测试时长的增加,脱离率表现会变好[7]。路测车辆的脱离与测试场景具有强相关性[12]。统计分析加州发布的自动驾驶脱离数据后发现,相比于高速公路,自动驾驶脱离更容易发生在城市道路[13]。造成自动驾驶脱离的原因各异[14],根据脱离的发起者不同可将脱离分为2 类,即被动脱离和主动脱离[11]。被动脱离是指由场景限制及车辆功能限制造成的脱离,由自动驾驶系统发起。主动脱离是指当安全员认为自动驾驶车无法应对当前测试场景时主动发起的脱离。也有研究将脱离分为避险脱离和非避险脱离,认为考虑非避险脱离会低估自动驾驶车的表现[15]。
路测车辆为了安全而采取过于保守的策略,会产生换道行为犹豫、通过交叉口速度过慢等现象,进而引起交通拥堵、交通效率降低甚至路怒[16]。现有研究中主要通过理论推导[17]和仿真[18-22],分析不同车道设置[17]、不同自动驾驶能力(跟驰距离[17]、反应时间[19]等)、不同自动驾驶渗透率[17-21]下自动驾驶车对交通效率的影响。
自动驾驶路测单一指标难以全面且客观地反映自动驾驶路测水平。例如,过于保守的行驶策略在能保证测试安全的同时却会影响道路的通行效率。路测的自动驾驶车类型包括商用车、乘用车和专用作业车[23]等。路测道路环境包括城市道路、高速公路[23]等。考虑到不同类型车辆的性能不同,在不同道路场景下的行驶特征也不同,对于自动驾驶路测表现评价需要分场景、分车型。例如,在城市道路上测试的专用作业车行驶速度低且测试里程相对短,而在高速公路上测试的商用车行驶速度高且测试里程长。因此,提出了自动驾驶路测融合度模型,综合考虑不同路测车型和不同路测场景下路测安全性及路测对交通效率的影响。
1 自动驾驶路测融合度模型构建
1.1 名词定义
(1)自动驾驶路测融合度。自动驾驶车在开放道路测试过程中融入现有道路交通系统的程度。
(2)避险脱离。在实际路测过程中,自动驾驶车受软硬件失效、紧急情况等因素干扰而脱离,或尽管未检测到异常,但由于存在碰撞风险,驾驶员(安全员)不得不进行干预而保持安全,使车辆脱离[15]。
1.2 自动驾驶路测融合度模型
对于自动驾驶路测融合度模型,同时考虑了安全以及效率两方面。以自动驾驶累计测试里程、自动驾驶累计测试时长和避险脱离率为指标表征自动驾驶路测融合度的安全性。以通行能力影响率和运行速度差异率为指标表征路测融合度的效率。k类场景下类型j车辆的自动驾驶路测融合度的计算式如下所示:
式中:D为自动驾驶路测融合度,D∈[0,100];wijk为第i个指标权重,且∑wijk=1;sijk为第i个评价指标标准化后的属性值,sijk∈[0,100]。自动驾驶路测融合度值越大则代表自动驾驶车与周围交通流融合程度越高。
自动驾驶路测融合度评价框架如图1所示。首先,对路测车型及场景分类,明确评价的车型以及路测场景类型,选取合适的指标构建评价指标体系;然后,确定各评价指标的标准化函数并计算各指标的权重,从而构建自动驾驶路测融合度模型;最后,根据实测数据和仿真数据计算路测融合度。
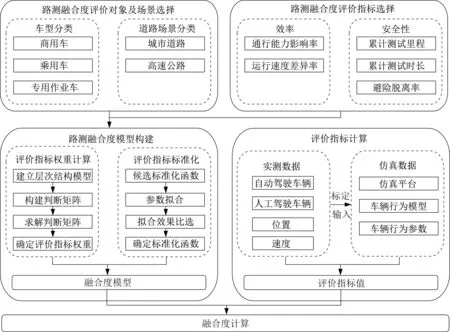
图1 自动驾驶路测融合度评价框架Fig.1 Evaluation framework for integration degree of autonomous vehicles in road testing
1.3 自动驾驶路测融合度评价指标
自动驾驶路测融合度模型选取了能表征安全性和效率的5 个评价指标。安全性方面,目前缺少路测阶段事故率统计数据,因此选择能表征安全性的避险脱离率指标。若累计测试里程或累计测试时长过低时计算得到的避险脱离率难以客观反映自动驾驶路测表现,则同时考虑累计测试里程和累计测试时长。随着累计测试里程和累计测试时长的增加,自动驾驶车的安全性也得到一定程度提升。因此,累计测试里程和累计测试时长也被选为自动驾驶路测融合度安全性评价指标。效率方面,选择表征个体效率的运行速度差异率和表征路段交通效率的通行能力影响率。
(1)自动驾驶累计测试里程(km·(车·年)−1)指一年中同企业平均每辆自动驾驶车在驾驶模式为自动驾驶时行驶的总里程。基于实际自动驾驶路测数据,统计同一企业平均每辆自动驾驶车在一年中驾驶模式为自动驾驶时的测试总里程。
(2)自动驾驶累计测试时长(h·(车·年)−1)指一年中同企业平均每辆自动驾驶车在驾驶模式为自动驾驶时行驶的总时长。基于实际自动驾驶路测数据,统计同一企业平均每辆自动驾驶车在一年中驾驶模式为自动驾驶时的测试总时长。
(3)避险脱离率(次·百公里−1)指一年中单位里程(百公里)同企业自动驾驶车平均每车由于避险而脱离自动驾驶模式切换为人工驾驶模式的次数。根据自动驾驶测试脱离前后驾驶特征变化识别是否为避险脱离[15]。识别避险脱离后统计同企业自动驾驶车一年中每百公里的避险脱离次数即为避险脱离率。
(4)通行能力影响率(%)指自动驾驶路测前后道路通行能力的变化率,计算式如下所示:

式中:Cˉat指自动驾驶路测前的道路通行能力;Cˉbt指自动驾驶路测后的道路通行能力。
当通行能力影响率为负数值时说明自动驾驶车加入后道路通行能力提高。通行能力影响率受限于数据可获取性,由于通行能力影响率较难根据实测数据直接获得,因此可将实测数据中提取到的自动驾驶车和人工驾驶车的运行参数(速度、加速度等)作为输入,通过仿真结果计算得到。
(5)运行速度差异率(%)指自动驾驶车的平均运行速度与人工驾驶车的平均运行速度的差异率,计算式如下所示:

式中:vˉa是自动驾驶路测时自动驾驶车的平均运行速度;vˉm是测试时周边人工驾驶车的平均运行速度。
当运行速度差异率为负数值时说明自动驾驶车的平均运行速度高于人工驾驶车的平均运行速度。运行速度差异率计算过程中所需的人工驾驶车的平均运行速度可以根据与自动驾驶车在同区域同时段运行的网约车数据计算得出。
1.4 仿真推演
由于难以获取自动驾驶路测时周边交通流数据,因此仅基于自动驾驶实测数据无法直接估算自动驾驶路测时的道路通行能力。以实测数据为驱动,构建仿真模型来推算道路通行能力。
(1)仿真模型搭建
基于路测时真实自动驾驶车和人工驾驶车行驶的速度和加速度分布数据以及特征,搭建交通流仿真模型。仿真模型选用元胞自动机[24]。
每辆车的状态由其速度和位置表征,若单位时间为1,则t时刻下状态按照如下演化规则更新:

式中:amax为安全舒适范围内自动驾驶车的最大加速度;acom为安全舒适范围内自动驾驶车的舒适减速度;v为当前车速;vd为期望车速;dd为期望车间距离;d为当前车间距离;d0和d1为与速度相关的安全距离参数;tra为自动驾驶车反应时间;vn−1为vn的前车车速。
(3)人工驾驶车控制模型
人工驾驶车的跟驰行为采用Newell 跟驰模型[26],交通流中第n辆车的位置变化如下所示:

式中:trm为人工驾驶车反应时间;xn(t+trm)为车辆n在(t+trm)时刻的位移;xn−1(t)为车辆(n−1)在t时刻的位移;dm为车辆间距差项。
换道模型采用Gipps模型[27],将车辆换道因素归为未来转向需求、由上匝道汇入主路、超越前方慢车。不同车辆在不同换道因素下会产生不同的换道期望车辆间距和速度差。当车辆与周围车辆间距、速度差等满足车辆预期的换道条件时,有换道需求的车辆才会进行换道。
(4)通行能力影响率计算方法
通行能力是指在一定道路、交通、环境条件下,道路上某一断面在单位时间内能通过的最大车辆数(pcu·h−1)。对于无信号灯控制的路段,通行能力可由最大饱和流率近似。模拟交通流5 min 内最大流量为q,则通行能力Cˉ计算式如下所示:
(5)仿真参数输入
为了保证仿真交通流尽量还原真实道路表现,收集自动驾驶车测试时的运行特征和同时空的人工驾驶车交通流数据,用实际数据标定路段流量、期望速度分布、期望加速度分布等参数,对于少量难以获取的驾驶行为模型参数,通过参考既有文献和对测试车企的访谈确定。
交通流仿真中,对于人工驾驶车跟驰模型,城市道路场景下车辆间距差项dm和反应时间trm由文献[28]中实测数据标定,公路场景下由文献[29]中实测数据标定;对于安全舒适范围内自动驾驶车的最大加速度amax、舒适减速度acom以及期望车间距离dd、自动驾驶车反应时间tra等参数,可根据文献[30]中方法基于实际自动驾驶路测数据标定。
1.5 评价指标标准化
自动驾驶路测融合度评价指标包括正向指标和逆向指标。路测融合度的值随着正向指标的值增大而增大;反之,路测融合度的值随着逆向指标的值增大而减小。自动驾驶累计测试里程、自动驾驶累计测试时长为正向指标,避险脱离率、通行能力影响率及运行速度差异率为逆向指标。
假设:当正向指标值高于某一水平后,指标值增加不再影响融合度值,当正向指标低于某一水平后,指标值减少不再影响融合度值;当逆向指标值低于某一水平后,指标值减少不再影响融合度值,当逆向指标高于某一水平后,指标值增加不再影响融合度值。各评价指标标准化后的最大值为100,最小值为0。评价指标标准化后的值越大,融合度就越好。融合度指标标准化的确定包括以下3个步骤:
(1)数据收集
设计五点式李克特量表,通过问卷收集获取专家对评价指标的看法,由专家对评价指标进行评分。将评价指标按照体现路测融合度的高低分为5个等级,从体现路测融合度低到体现路测融合度高依次为非常差、差、一般、良好、优秀。与常用的1~5分不同,为了后期更直观地展示路测融合度,将5个等级(非常差、差、一般、良好、优秀)对应的分值分别设置为0、25、50、75、100。
(2)标准化函数选择
本方法中标准化目标为将各评价指标标准化至[0,100]范围内。为了选择合适的标准化函数,对比不同标准化函数拟合结果的均方误差(αMSE),选择均方误差最小的函数形式作为标准化函数。正向指标和逆向指标的标准化函数可以不同。共选取线性函数、对数函数、皮尔生长曲线函数和负指数函数4种标准化函数。其中,线性函数和对数函数同时适用于正向指标和逆向指标标准化,皮尔生长曲线函数只适用于正向指标标准化,负指数函数只适用于逆向指标标准化。考虑到标准化需求和函数取值连续性,为了使函数更好地拟合定义域,对对数函数、皮尔生长曲线函数和负指数函数的公式做了线性调整。各标准化函数的具体表达式如表1所示。
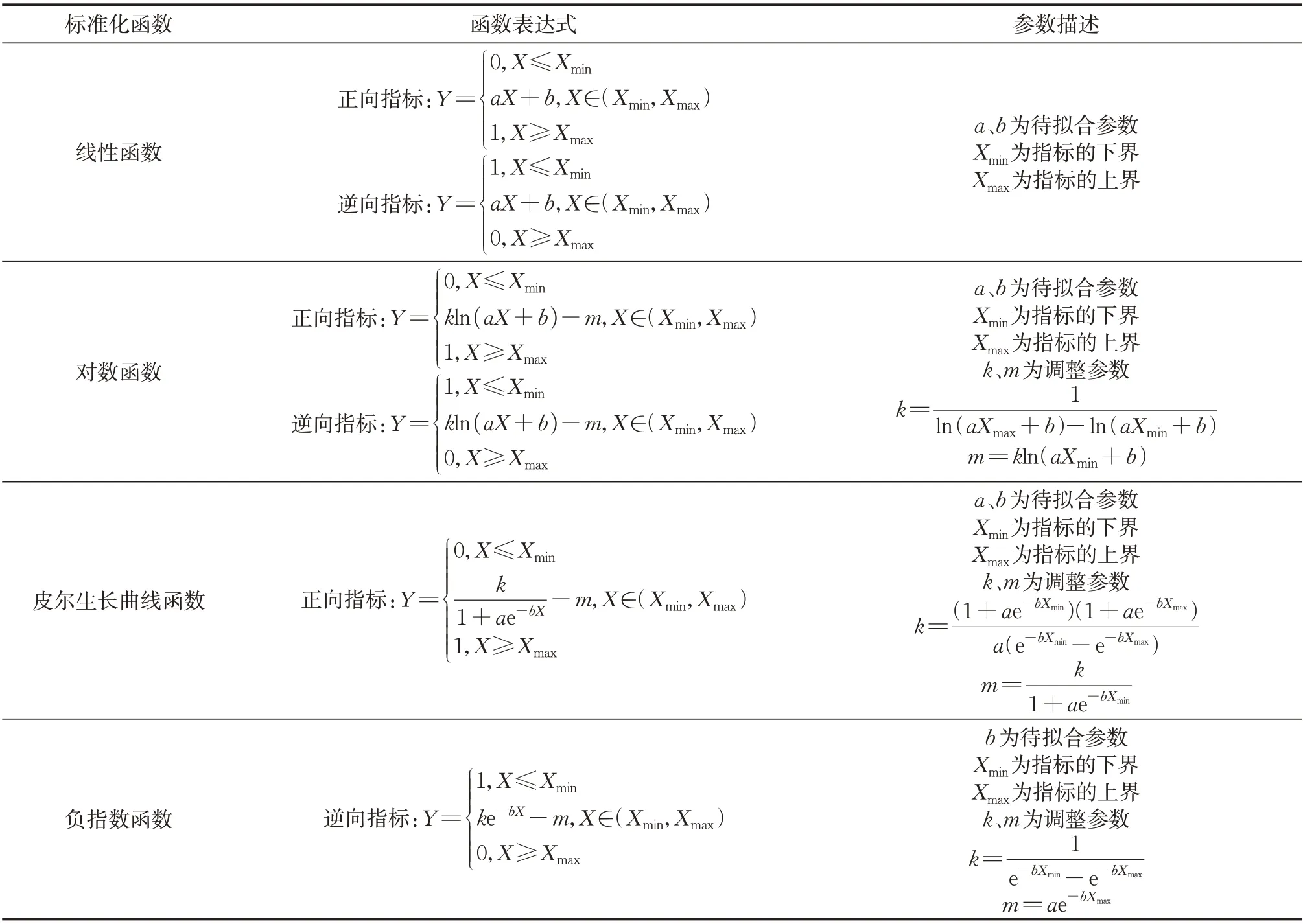
表1 标准化函数Tab.1 Standardized functions
(3)标准化函数参数拟合
选取评价指标为自变量,每份问卷中各评价指标对应分数的平均值为因变量(路测融合度真实值),作为参数拟合的数据集。基于数据集和标准化函数,采用高斯-牛顿迭代法进行参数拟合,计算标准化函数的参数。使用αMSE来表征各标准化函数的拟合表现,针对正向指标和逆向指标分别选取αMSE最小的标准化函数。
1.6 评价指标权重
采用层次分析法[31]确定各评价指标权重,包括层次结构模型建立、判断矩阵构造以及判断矩阵求解和一致性检验3个步骤。
(1)层次结构模型建立
评价指标权重计算仅考虑自动驾驶路测融合度评价目标层和包含5 个评价指标的指标层,具体层次结构模型确定如图2所示。

图2 路测融合度评价层次模型Fig.2 Hierarchical model for integration degree evaluation in road testing
(2)判断矩阵构造
以建立的层次结构模型为基础,通过专家打分进行评价指标重要性比较,决定各评价指标相对于目标的权重。对于本研究中的重要度比较,采用1~9标度方法构造判断矩阵A,如下所示:

式中:aij表示第i个评价指标和第j个评价指标之间的重要性比较关系,取值方法如表2所示。
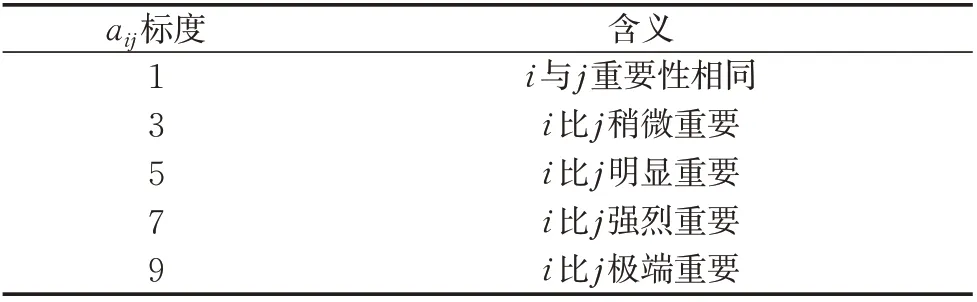
表2 评价指标重要性标度Tab.2 Significance scales for evaluation indicators
基于矩阵A,计算各评价指标的重要性,如下所示:

式中:wi为第i个评价指标的权重。
(3)判断矩阵求解及一致性检验
由于判断矩阵是由人为主观确定的,不一定具有完全一致性,因此当矩阵不具有完全一致性的时候,需重新调整矩阵中的相对比值,重新计算最大特征向量,直至判断矩阵具有满意的一致性。一致性指标C计算式如下所示:
式中:λmax为判断矩阵A的最大特征值;n为矩阵阶数。
基于C计算一致性比例R,如下所示:

式中:I为随机一致性指标,可由表3获得。
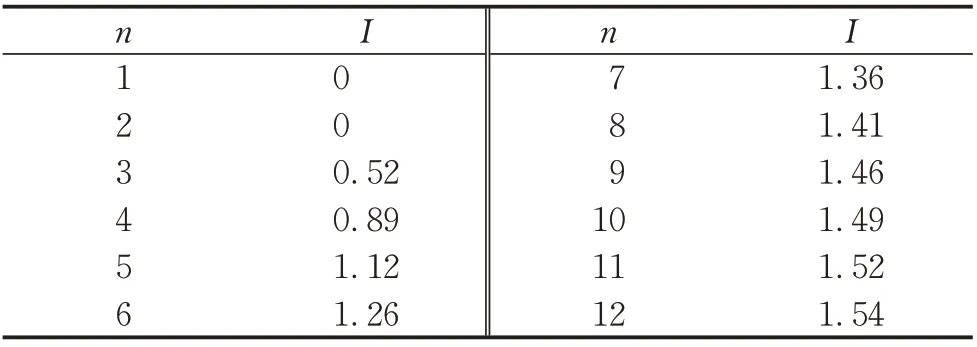
表3 I随n的变化Tab.3 Variation of I with n
当R≤0.10 时,通常认为判断矩阵的一致性是可以接受的,否则再次进行专家打分,对判断矩阵做适当修正,直到通过一致性检验,此时所求得的评价指标权重可用。
2 案例分析与讨论
2.1 场景概况
选取3 个典型车型+场景组合分别建立模型:①场景-Ⅰ,自动驾驶乘用车、Ⅰ类低风险城市道路场景;②场景-Ⅱ,自动驾驶乘用车、Ⅱ类一般风险城市道路场景;③场景-Ⅲ,自动驾驶集卡、Ⅲ类较高风险高速公路场景。场景复杂度划分参考上海市自动驾驶开放测试道路的划分方式[5],其中Ⅰ类场景是指上海市嘉定区低风险测试区域,Ⅱ类场景是指上海市嘉定区一般风险测试区域,Ⅲ类场景是指较高风险测试区域(东海大桥)。
2.2 数据概况
(1)自动驾驶数据
自动驾驶数据来源于上海市自动驾驶开放测试道路数据,自动驾驶数据字段包括车辆编号、经纬度、定位时间、车辆速度、车辆驾驶模式(自动驾驶模式/人工驾驶模式)等,数据采集频率为1 Hz。场景-Ⅰ共采集数据约291 万条,场景-Ⅱ共采集数据约173 万条,场景-Ⅲ共采集数据约726 万条。数据来源于4 个不同的车企,其中车企-1 和车企-2 在城市道路场景下测试自动驾驶乘用车,车企-3和车企-4在高速公路场景下测试自动驾驶集卡。
(2)人工驾驶数据
人工驾驶数据源自与自动驾驶车测试同区域同时段的上海市网约车数据及货车数据。人工驾驶数据字段包括车辆号牌、经纬度、定位时间、车辆速度等,数据采集频率为1 Hz。场景-Ⅰ对应的人工驾驶数据约23万条,场景-Ⅱ对应的人工驾驶数据约143万条,场景-Ⅲ对应的人工驾驶数据约23万条。
2.3 调查问卷
通过问卷调查数据得到评价指标标准化函数参数拟合及指标权重确定所需数据。自动驾驶是创新性突破技术,因此问卷调查对象需要有一定的针对性。调查对象均为熟悉上海市自动驾驶开放道路测试情况的专家,主要包括自动驾驶测试安全员、测试工程师、系统设计工程师、测试监管人员以及自动驾驶研究相关的专家学者等。共收集有效问卷38份。
2.4 指标标准化结果
表4给出了不同标准化函数的拟合表现。对比各函数拟合后的αMSE,选取αMSE最小的函数作为评价指标的标准化函数。最终,选定皮尔生长曲线函数为累计测试里程和累计测试时长的标准化函数,选定负指数函数为避险脱离率、运行速度差异率和通行能力影响率的标准化函数。标准化函数参数标定结果如表5 所示,各指标标准化函数拟合结果如图3~7所示。
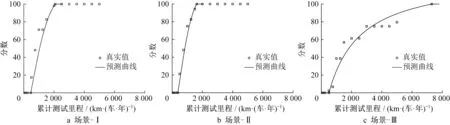
图3 累计测试里程标准化函数拟合结果Fig.3 Fitting results of standardized function for cumulative testing mileage

表4 标准化函数拟合表现(αMSE)Tab.4 Fitting performance of standardized functions(αMSE)

表5 标准化函数参数Tab.5 Parameters of standardized functions
相比于城市道路场景,高速公路场景下自动驾驶路测对累计测试里程和累计测试时长要求更高。如表5 所示,自动驾驶路测融合度为100 时,城市道路场景-Ⅰ和场景-Ⅱ下,对累计测试里程的要求分别为2 075 km·(车·年)−1和1 620 km·(车·年)−1,而场景-Ⅲ下对累计测试里程的要求则为7 300 km·(车·年)−1。对于避险脱离率指标,场景-Ⅰ的要求最高(最低要求为10次·百公里−1),场景-Ⅱ和场景-Ⅲ的最低要求都为15次·百公里−1。相比于场景-Ⅰ(最低要求为10%),场景-Ⅱ(最低要求为15%)和场景-Ⅲ(最低要求为50%)的通行能力影响率的要求则有所放宽。3 个场景下的运行速度差异率指标要求也有相同的趋势。
2.5 指标权重结果
根据问卷结果发现,对于场景-Ⅰ和场景-Ⅱ2类复杂度不同的城市道路场景,不同评价指标间的相对重要性结果相同。根据调查结果构建如下判断矩阵:

得到一致性检验结果为0.005 9,小于0.10。
根据指标权重确定方法计算各评价指标权重,如表6所示。表6表明,避险脱离率在5个指标中权重最大,约占50%。城市道路场景下各指标重要程度排序为避险脱离率、通行能力影响率、运行速度差异率、累计测试里程和累计测试时长。高速公路场景下各指标重要程度排序为避险脱离率、累计测试里程、通行能力影响率、运行速度差异率和累计测试时长。

表6 城市道路场景和高速公路场景下各指标权重Tab.6 Weight of each indicator under urban road scenarios and highway scenario
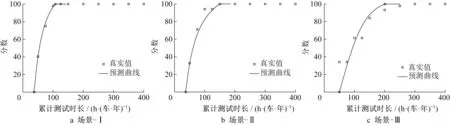
图4 累计测试时长标准化函数拟合结果Fig.4 Fitting results of standardized function for cumulative testing duration

图5 避险脱离率标准化函数拟合结果Fig.5 Fitting results of standardized function for risk-avoiding disengagement frequency

图6 运行速度差异率标准化函数拟合结果Fig.6 Fitting results of standardized function for operating speed difference rate

图7 通行能力影响率标准化函数拟合结果Fig.7 Fitting results of standardized function for capacity difference rate
2.6 路测融合度分析
基于5个评价指标,计算3个场景下不同车企的路测融合度评价指标,结果如表7 所示。城市道路场景下的自动驾驶乘用车避险脱离率远高于高速公路场景下的自动驾驶集卡。主要原因是自动驾驶集卡的累计测试里程和累计测试时长远远大于自动驾驶乘用车。同车企的自动驾驶乘用车,在场景-Ⅱ(一般风险)下的避险脱离率要明显高于在场景-Ⅰ(低风险)下的避险脱离率。

表7 3个场景下评价指标计算结果Tab.7 Calculation results of evaluation indexes under three scenarios
结合评价指标值和评价指标权重计算得到路测融合度结果,如表8 所示。由表8 可以看出,高速公路场景下自动驾驶集卡融合到现有交通系统的程度高,路测融合度高于85.0,而城市道路场景下自动驾驶乘用车融合到现有交通系统的程度相对较低,路测融合度低于25.0。

表8 3个场景下各车企路测融合度计算结果Tab.8 Calculation results of integration degree under three scenarios for each car company
导致高速公路场景下与城市道路场景下路测融合度差异较大的原因在于:一方面,高速公路场景下自动驾驶集卡车速快,其周边交通参与者比较明确,行为相对规范,而在城市道路场景下自动驾驶乘用车周边交通参与者的行为更多样,自动驾驶乘用车更难融入;另一方面,高速公路场景下自动驾驶集卡的累计测试里程以及累计测试时长显著高于城市道路场景下自动驾驶乘用车的累计测试里程及累计测试时长,系统可靠性也相应更高。另外,对比车企-1和车企-2的自动驾驶乘用车在不同场景下的路测融合度发现,同车企的车在场景-Ⅰ(低风险)的路测融合度明显高于场景-Ⅱ(一般风险)的路测融合度,说明对于同一车企的自动驾驶乘用车,测试场景的复杂度越高,融合度越低。因此,加大自动驾驶测试里程、测试时长和测试场景复杂度,可以促进自动驾驶技术的成熟。
3 结论
(1)在提出自动驾驶路测融合度评价框架的基础上,选择了考虑路测安全性与路测效率的5 个评价指标,利用专家打分和层次分析法构建了自动驾驶路测融合度模型。
(2)对于路测融合度,基于专家调查结果分析不同评价指标权重,结果表明避险脱离率是表征自动驾驶车融入现有道路交通系统程度的最重要指标;另一个重要影响因素是通行能力影响率,表明自动驾驶路测过程中应充分关注自动驾驶路测对周边交通流通行效率的影响。
(3)上海市自动驾驶路测实际数据和仿真数据表明,可采用路测融合度模型表征自动驾驶车融入现有道路交通系统的程度,并验证了路测融合度模型的合理性和有效性。目前在城市道路场景下自动驾驶乘用车的路测融合度相对较低,而在高速公路场景下自动驾驶集卡的路测融合度相对较高,主要原因在于高速公路场景复杂度相对简单,而且路测里程和路测时长都相对较高,说明加大自动驾驶测试里程、测试时长和测试复杂度,可促进自动驾驶技术的成熟。
路测融合度模型的评价指标选择、评价指标标准化和模型参数标定方法在不同场景中具有很好的适应性。在未来研究中,充实更多车型及更多测试场景数据,进一步验证自动驾驶路测融合度模型的科学性和适用性。
作者贡献声明:
鹿 畅:研究设计,数据分析,论文撰写。
刘 颖:研究设计,论文修订。
赵丽影:数据处理,仿真设计。
涂辉招:问卷设计,数据分析。
汪大明:数据采集。
宋晓航:数据采集。
猜你喜欢
大众标准化(2022年20期)2022-11-07
汽车实用技术(2022年14期)2022-07-30
乡村科技(2021年22期)2022-01-06
汽车工程师(2021年11期)2021-12-21
今日农业(2021年7期)2021-11-27
口腔护理用品工业(2021年4期)2021-11-02
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
智富时代(2019年6期)2019-07-24
智富时代(2019年6期)2019-07-24
