工业机器人控制系统的研究与应用
2022-06-02 15:14余金永苏冠领莫中凯
科技创新与应用 2022年14期
余金永,苏冠领,莫中凯
(广西城市职业大学,广西 崇左 532200)
工业机器人是人工智能的一个分支,有非常广阔的前景,而控制系统对机器人智造至关重要。无论是“大数据+工业机器人”还是“互联网+工业机器人”,都在催促着工业机器人控制系统的更新与换代。只有对工业机器人控制系统的不断优化,才能快速适应市场日新月异的要求与需求。
1 工业机器人控制系统研究的基本内容
1.1 研究工业机器人控制系统的必要性
为了进一步的提高工业机器人控制系统的总体水平,将其更好地应用在生产线上,为社会进步做出更多贡献,首先要分析工业机器人控制系统研究中的基本内容并对其必要性进行分析。从宏观角度来看,工业机器人的快速发展是实现自动化的必经之路,也是推动相关行业自动化发展的一个重要途径。实现自动化的生产,尤其是在生产线上实现自动投料,可以进一步降低成本。相对于人力成本而言,工业机器人的成本较低。虽然在早期研发以及使用的过程中可能会投入大量的成本,但是从长远的角度来看,如果能够稳定运行,便可以获得较好的经济效益。相对于长期的雇佣工人,又或者是承担相应的人为因素风险,工业机器人显然极其重要,对于降低成本是有着极其重要的现实意义的。工业机器人的外观如图1 所示,由图1 可以看出,其基本结构大多类似机械臂,可以适用于各类工业场合。

图1 工业机器人外观图
另外一方面,工业机器人在生产线上可以24 h进行工作,不知疲惫地进行投料生产等。相对于人工生产而言,工业机器人的效率更高,质量也更高。在相关行业当中,能够发挥出一定的作用。当然最重要的还是工业机器人的安全性能比较高一些,适用于危险程度较高、且存在安全隐患的工种以及具体任务的执行,这些工作单纯依靠人力是无法完成的。不仅会给人们的生命安全造成威胁,同时也会留下很多安全隐患,不利于流水线上的生产。使用工业机器人可以大幅度减免问题的发生,也能够有效地规避风险,对于提高生产效率,保证生产质量,推动流水线生产的高质量发展是有一定帮助的。在具体设计的过程中,研究工业机器人控制系统的必要性主要在于控制系统是整个工业机器人的核心。通过良好的控制策略实现软硬件相互结合,是保证工业机器人正常使用并投入生产中的重要途径。控制系统的设计需要对算法进行优化,同时也需要通过软硬件相互结合,利用通信知识、控制知识、人工智能知识来解决实际问题。因此对工业机器人进行研究,对设计更好的控制系统是具有重要的现实意义的。
1.2 工业机器人控制系统存在的问题
目前来看,在工业机器人使用的过程中还存在着若干问题,主要矛盾在于控制系统的设计还存在问题。首先从算法角度进行分析,也可以称之为从软件角度进行分析。目前的控制系统主要算法是PID 控制算法。PID 控制算法由于比较简单容易调节,在使用的过程中仅需调解比例参数、积分参数和微分参数就可以得到控制的作用。不需要对系统进行复杂的建模,同时也不需要进行过多的参数调节。相对于其他的控制策略而言比较简单,这也是目前工业上应用最广泛的一个控制算法。但是不可否认的是,PID 控制算法由于滞后性比较强,在使用的过程中可能会无法达到精准控制的作用。在一些精准性要求较高的场合,PID 控制算法难以发挥出实际的作用,这也就给工业机器人的控制系统设计带来了很多的矛盾。而随着相关理论的进一步发展,鲁棒控制策略、预测控制策略、LQR 控制等也广泛地应用于工业机器人当中。对于不同要求有着不同的算法使用方案,但是以上几种控制算法相对于传统的PID 控制算法而言,相对来说较为复杂,需要对系统本身进行准确的建模,同时也需要进行大量的参数调节,对于工作人员而言是有着一定的难度的,对于工业机器人的正常应用也是带来了一系列影响。由此可以看出,目前在算法上还存在着一定的矛盾,工业机器人控制系统的设计还存在着诸多问题。而从硬件角度进行分析,工业机器人对于硬件要求是比较高的。一方面是稳定程度比较高,另外一方面是精度比较高。由于工业生产所面临的情况比较复杂,很多设备都无法正常使用。在外界干扰的情况下,出现了精度低、效率低且稳定程度不好等现象。不仅带来了严重的成本问题,同时也给生产效率造成了严重的影响。因此在未来发展的过程中,对于软件硬件等方面问题还需要进行深入探索,并提出科学的解决方案,让工业机器人的控制系统设计得更加合理。
1.3 加强与重点企业的交流与合作
目前在工业机器人控制系统的研究与应用领域当中,其实还是存在着一些问题的。主要原因在于理论界和工业界存在着较大的差距,理论无法更好地应用,而工业界往往为了追求稳定性与鲁棒性,大多数时候都会选择传统的控制算法。先进的算法无法落地,没有办法给工业机器人的生产带来一定的帮助,使得工业机器人的发展受到了严重的限制。因此从目前工业机器人控制系统研究领域当中可以看出,其基本的方向又或者是基本的内容还是要加强和重点企业交流与合作。一般来讲,学校有大量的研究者对算法进行研究优化,并对理论进行创新。而企业则是将相关的算法以及理论进行更好的落地,并通过相应的设计方案使其应用在各种各样的场合当中。尤其是在生产线上大量地应用工业机器人,可以降低人力成本,同时也能够缩短工作时间,对于提高产品的核心竞争力有着一定的帮助。因此研究机构应加强和重点企业的交流合作,一方面是让更多的理论和实践相互结合,另外一方面是从实践当中反馈更多的数据信息。对于工业界目前的实际难题以及可能存在的风险进行研究,反馈给相关的理论研究学者。对于其继续研究工作能够提供相应的帮助,也能够积累更多的经验,这对于促进工业机器人控制系统的研究有着很大的帮助。
2 工业机器人控制系统研究路径
2.1 优化工业机器人软、硬件及程序设计
在工业机器人控制系统生产的过程中,软件的更新和硬件的设计都是十分重要的环节。软件和硬件相互配合保障其稳定性和精度,是促进工业机器人快速发展的一个重要途径。因此在工业机器人系统研究的过程中,首先应当对算法进行充分的分析。传统的PID算法固然能够适应于大多数的场合,但是随着控制精度要求越来越高,社会生产的复杂程度越来越高,传统的工业机器人控制算法也就不再适合一些高精度的场合。PID 控制算法流程如图2 所示,只需调节P、I、D 3个参数,不需要复杂的系统建模,相对较为简单,但是控制精度一般,滞后性也较为明显。研究更多性能更好的算法,并将其应用在实际场景当中,对于工业机器人的快速发展是具有很重要的现实意义的。同时在软件设计的过程中,多数的工业机器人采用PLC 进行程序编写,由于PLC 代码比较简洁,相对来说门槛比较低,对于大多数的工程技术人员而言,进行设计也是比较容易的。但单纯地依靠PLC 还不能完全解决实际问题,在一些高尖端的工业机器人生产过程中,还需要采用高级语言来进行编写,如C++。因此在软件系统设计的过程中一方面提高算法精度,另外一方面对具体的软件设计方案进行更新,也具有很重要的现实意义。在硬件使用的过程中,多数工业机器人对于硬件的稳定性要求比较高,需要能抵抗外界干扰,即使是在恶劣的工厂条件下依然能够长期地进行工作。因此在进行硬件设计以及生产的过程中,需要考虑到稳定性的问题以及精度的问题。
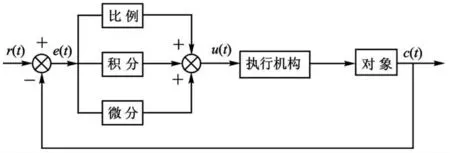
图2 PID 控制算法流程图
2.2 提升工业机器人投料装置与自动化生产线的结合程度
提升工业机器人投料装置与自动化生产线的结合程度,是未来的一个主流发展趋势。由于工业机器人在目前自动化生产线上的主要应用场景是投料,而投料也是需要24 h 进行工作,才能够保障其长期生产。但是由于很多工业机器人的投料装置无论是在软件设计还是硬件设计的过程中,都不符合实际情况。只能够适用于某些特定的场景,在一些自动化生产线上结合程度不高,没有办法发挥作用,反而产生了若干的不稳定性问题。因此在未来的发展过程中,优化工业机器人的设计方案,并将其投料装置应用在自动化生产线上,不断的进行调整。和自动化生产线的结合力度越强,也能够保证自身的精度越高,才能够适用于更多复杂的场景,以此来发挥出相应的作用。工业机器人生产流水线如图3 所示,可以实现无人化24 h 生产,具有较高的生产效率。

图3 无人化工业机器人生产流水线
2.3 通过不断实践提高机器人控制系统的精确度
在传统工业机器人的设计过程中,很多高校对于机器人的控制算法控制系统的设计精度都比较高。但是只适用一些特定的场合,在具体应用的过程中可能存在不适应的情况。尤其是目前理论界和工业界存在着较大的鸿沟,使得很多算法没有办法落地,工业界所使用的一些工业机器人生产方式以及控制系统的设计方案大多数都没有办法进行更新。为了保证自身的稳定,需要牺牲精度,牺牲其自身的性能,这就使得工业界的发展相对落后。在未来工作的过程当中,为了保证工业机器人控制系统设计的更加合理,让投料装置在自动化生产线上得到更好的应用。不断的实践,不断地提高机器人控制系统的精度,是具有很重要的现实意义的。控制精度的提高一方面要保证硬件的性能比较好,需要提高总体水平。另外一方面需要从算法出发,对控制策略进行不断的改进。算法的稳定性要强,还需要对算法的参数进行大量的调节工作,需要根据实践来反馈相关的数据,根据现场的情况进行调优工作。依靠工作人员的大量经验以及先进技术进行参数设置,才能够提高工业机器人的控制精度。随着人工智能技术的快速发展,越来越多的智能化控制方法以及智能化的系统设计方案不断涌现,通过人工智能算法,也可以进行自动的参数调优。采用模糊控制、神经网络等方式进行机器人控制系统的建模工作,在后续的研究过程中,可以利用电子计算机进行训练和测试等工作,以此来不断调优算法,提高工业机器人的控制精度。因此在未来发展的过程中,通过不断结合新的技术,让理论和实践不断的发展,以此来提高工业机器人控制系统的精度,具有重要现实意义。
3 结束语
总而言之,工业机器人的大量应用是推进生产快速发展的重要途径。但是在目前的控制系统设计中还存在精度不高、稳定性不强的问题。在未来发展的过程中,仍需要进一步优化算法,更新硬件,并和行业内的先进企业进行联合生产,不断地提高工业机器人的应用水平。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
粮食加工(2022年1期)2022-03-23
玻璃(2022年1期)2022-02-23
数字技术与应用(2020年4期)2020-06-22
中国测试(2018年9期)2018-05-14
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
职业·中旬(2009年12期)2009-06-01