基于绳索驱动的机械手腕结构设计与运动分析*
2022-06-01 02:25闫欣然郭祥如魏梵森曹苏文卓张伟杰
科技创新与生产力 2022年3期
闫欣然,郭祥如,魏梵森,曹苏文卓,张伟杰,胡 杨
(1.天津市先进机电系统设计与智能控制重点实验室,天津 300384;2.天津理工大学机电工程国家级实验教学示范中心,天津 300384)
机械手腕是连接机械上臂和末端执行器的关键部件,可通过手部夹持器姿态和空间位置的变化实现机械手腕的运动。 机械臂广泛应用于工业、 农业、 服务业、 航空航天等领域[1-4]。 为满足复杂工况下机械臂运动灵活性和轻量化的要求,需要手腕机构具有多个自由度和较小的质量[5-7]。然而,在设计中机械手腕的自由度越多,其机械结构与控制系统也会越复杂。
在机械手腕结构设计方面,并联机构具有刚度高、 精度高、 承载能力大等优点,在机械手腕结构设计中得到了广泛应用[8],如孙鹏[9]运用并联机构的构型特点提出了一种三自由度球面3-RRP 并联机构的机械手腕; 张续冲等[10]对Reachy 机械手腕进行改进,保证了腕关节3 个电机旋转轴线都正交,并以手腕舒适度和势能最小为目标进行了优化。 为保证腕关节的轻量化设计,驱动装置一般固定在远离腕关节的部位,如魏英伟[11]在iW Arm 五自由度可穿戴机械臂的机构设计中,采用线驱动方案完成腕关节结构设计; 王腾[12]进一步设计了一款新型的线驱动柔性微创手术机器人,腕关节采用了连续体的结构,具有超冗余机械臂的特性。 为了保证机械手腕的灵活性,王泽胜等[13]提出一种由3UPS/S 三自由度并联机构组成的腕关节,可以实现如人体腕关节般的桡屈和尺屈、 背伸和屈曲、 外旋和内旋运动。 此外,针对绳驱动腕关节这一设计难点,陈建国[14]设计了一种紧凑轻巧、 结构简单的三自由度并联腕关节,使腕关节具有较大的柔顺性。 Sheng[15]设计了一种基于柔性曲线梁关节的线驱动柔性机械手,并对其进行了静态仿真,结果符合设计要求。目前具有多自由度、 高柔顺性、 重量轻、 结构紧凑的腕关节是设计时要考虑的关键问题,而广义通用的柔性机器人手腕还需进一步探索。
综上所述,本文基于人体手腕的结构特点设计一种多自由度和较高柔性的仿人机械手腕,完成腕关节模块的结构设计,利用So1idWorks 软件建立三维模型,结合MATLAB 仿真计算和So1idWorks 模型对其进行运动学分析和仿真。
1 腕关节机械结构设计
1.1 机械手腕的结构
基于人体手腕解剖结构可以确定仿人机械手腕需要具备3 个自由度[6]。 为实现手腕的高刚度、 高精度,采用并联机构为手腕的基本结构。 手腕的主要传动方式为线缆驱动,使其具有较高的柔顺性。 同时驱动电机远离腕关节,以减小质量和转动惯量,实现轻量化设计。 本文设计的仿生轻量型机械手腕总体结构见第107 页图1,该机械手腕由动平台、静平台和中间的传动装置3 部分组成。 传动装置包含两个部分: 一部分为两端分别装配有等速万向节的传动轴,见图1-c。 其中传动轴穿过动平台和静平台的中心孔,输入端连接静平台的卷线轮,输出端连接动平台的行星齿轮减速器,从而实现绕z 轴的转动。 另一部分为三连杆并联机构,见图1-e,有6 个万向节,动静平台各布置3 个万向节,3 个万向节间隔120°布置,旋转轴不相交,并联机构提供了绕x 轴方向和y 轴方向的转动,万向节中间部分为连杆。 为使并联机构在运动过程中不与传动轴部分发生干涉,连杆设计成弯曲的形状,且连杆两端转动副轴线平行。 为了使机械手腕实现向3 个方向的转动,且与轻量化相适应,用线缆驱动作为传动方式,布线方式见图1-d。 图1-d 中只给出一组滑轮的布线方式,其他滑轮组布线方式相同。 通过控制传动轴旋转,从而在动平台上输出旋转运动,实现机械手腕绕z 轴的转动; 通过线驱动分别控制手腕关节绕x 轴和y 轴的转动,通过绳子在滑轮上的收放来控制手腕关节的俯仰,最终实现3 自由度转动。 同时,考虑到电机转速较高,为使传动轴输出端的转速与手腕末端执行器所需速度相适应,在动平台上安装行星齿轮减速器,装配方式见图1-b,内齿轮固定,3 个行星轮通过滚动轴承装在行星架上,太阳轮装配在传动轴的输出端,这样就可以通过太阳轮与行星轮的啮合实现减速。
图1 仿生轻量型机械手腕总体结构图
1.2 滑轮组结构设计
由于本设计使用线缆进行传动,实现机器人手腕的弯曲动作,因而需要设计配合使用的滑轮组,以实现线缆的导向和动静滑轮组减速的配合。
1) 滑轮设计。 在两个滑轮装配成滑轮组时,两个滑轮之间需要留有一部分间距(见图2-a),这里选用4 个销轴用平垫圈,用其中两个重叠后套在轴上,分别顶住两个深沟球轴承的内圈端面,另外两个销轴用平垫圈也分别顶在两个轴承的另外两端,用于和滑轮架配合,各零件装配关系见图2-b。
图2 导线用滑轮组
2) 滑轮组架设计。 本文进一步设计了支撑滑轮组的滑轮架,与动滑轮组不同的是,静滑轮架增加了为线绳导向用的轴承设计安装孔。 动滑轮和静滑轮组分别安装在动平台和静平台上,中间通过线绳传递运动,图3 为动静滑轮组装配示意图。
图3 动滑轮、静滑轮组装配示意图
1.3 传动轴结构设计
在传动轴设计过程中,考虑到十字轴式万向节存在不等速特性,因而选择汤普森等速万向节作为设计方案,汤普森等速万向节的三维模型见图4。
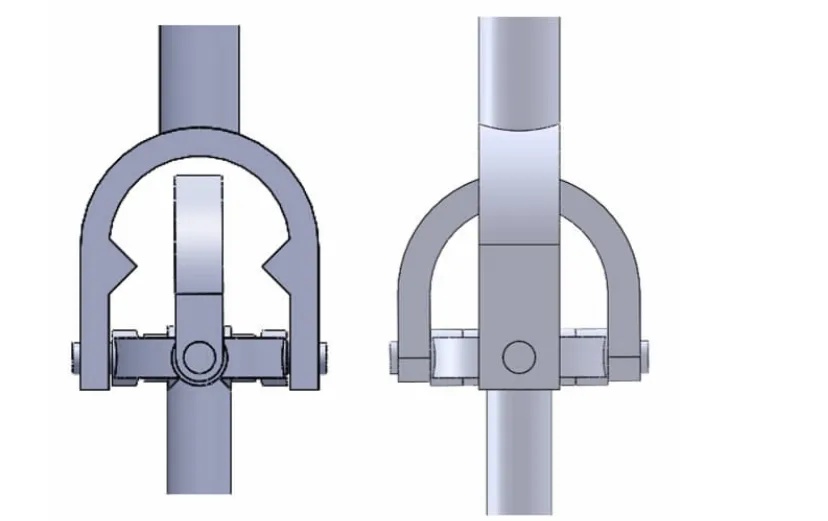
图4 等速万向节结构
传动轴的输入端和输出端结构相似,区别仅在于过渡用的轴段长度、 用于安装轴承的轴段长度以及输入端和输出端各自的用于运动输入、 输出零件的轴段长度及截面,各部分的轴段长度均需要在最终装配时做出调整。 而传动轴的中间段为实心轴,两端各有一个用于安装芯轴的孔,传动轴装配图见第108 页图5。
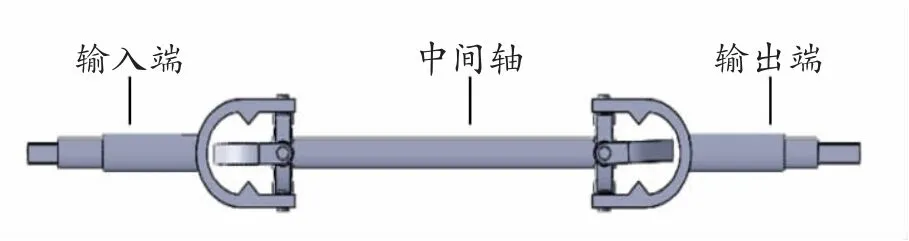
图5 传动轴装配图
2 运动学建模
腕关节运动坐标及几何关系见图6,上圆代表动平台,下圆代表静平台,动平台中R1,R2,R3,R4为4 个动滑轮,R1和R2由一个电机控制,R3和R4由另一个电机控制。 静平台中D1,D2,D3,D4为4 个定滑轮,动滑轮和定滑轮分别关于O1和O0中心对称,中心距均为r1。 静平台下有一半径为r2的卷线轮。 在动平台和静平台上分别建立三维直角动坐标系和静坐标系。 腕关节的静坐标系为O0-xyz,其中z 轴沿着垂直于静平台的方向向上。 动坐标系为O1-x1y1z1,z1轴从O0指向O1。 动坐标系O1-x1y1z1分别沿着静坐标系O0-xyz 的x,y,z 轴旋转角度为θ1,θ2,θ3。 则静坐标系O0-xyz 到动坐标系O1-x1y1z1的坐标变换矩阵[7]R'为
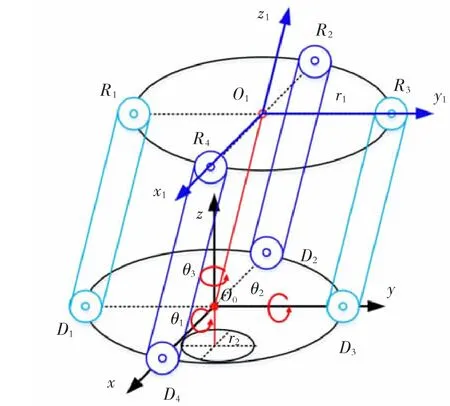
图6 腕关节运动坐标
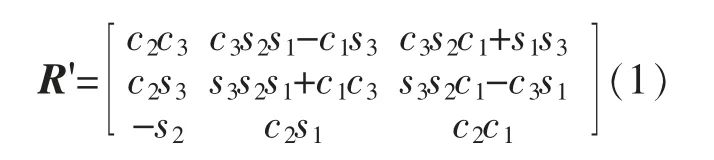
式中: ci=cosθi; si=sinθi; i 为角度的序号。
由此可以求解出3 个旋转角度,分别为
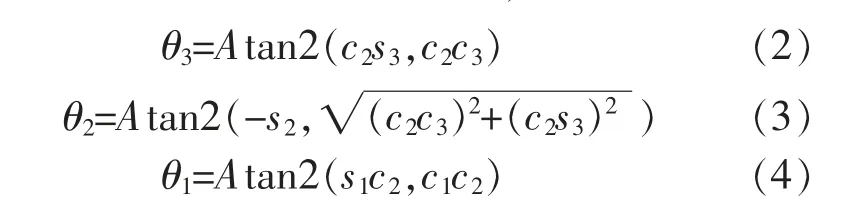
式中: θ3∈[0°,360°];θ2∈[-90°,90°];θ1∈[-90°,90°]。
定义Δ1,Δ2,Δ3为分别控制θ1,θ2,θ3的绳长收缩距离。 初始位置为动平台平行于静平台,即θ1=θ2=θ3=0°,Δ1=Δ2=Δ3=0,由图中几何关系得


3 运动学仿真验证
在仿真验证中,采用So1idWorks 模型和MATLAB仿真计算进行联合仿真,用So1idWorks 显示腕关节的输出位置姿态,再把输出位置姿态的角度值输入MATLAB 仿真计算的逆运动学中,对比两者结果,若相同则可以验证设计的准确性和一致性。 以动坐标系绕x 轴旋转角度θ1为例,θ2和θ3固定不动,利用So1idWorks 模型中的配合控制器控制θ1的大小分别为15°,30°,45°,60°,75°,90°,结果见图7。

图7 沿x 轴旋转仿真结果
第109 页表1 进一步给出So1idWorks 模型和MATLAB 仿真的结果对比,可以看出两者具有一致性。 利用So1idWorks Motion 在上平台放置旋转马达,马达转速设为5 r/min,下机架固定不动,将扭转角度设为θ3,结果见第109 页图8。
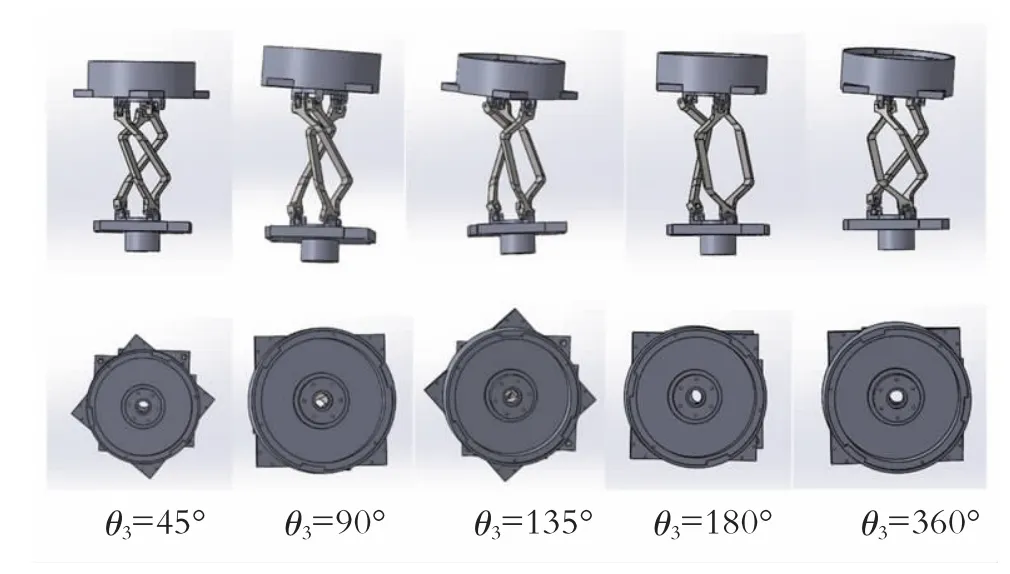
图8 扭转不同角度仿真结果
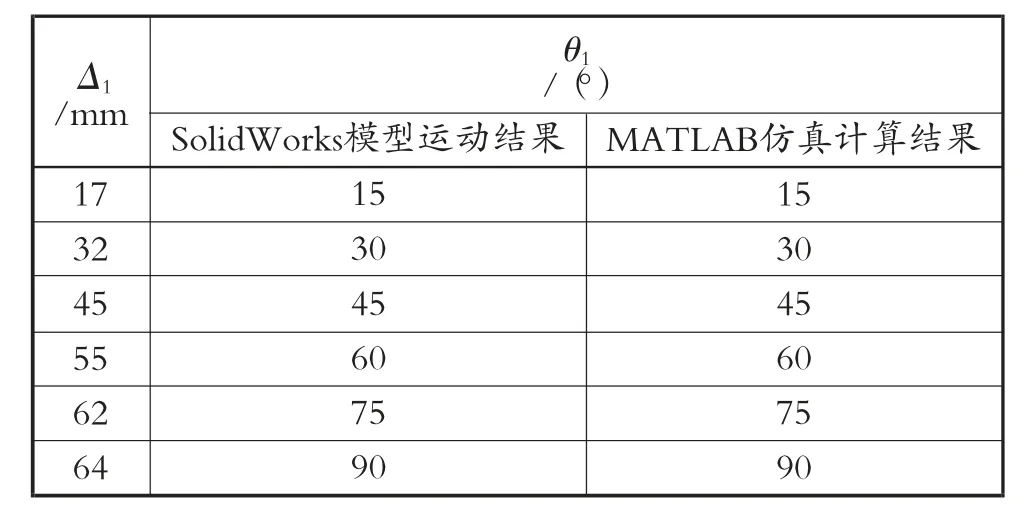
表1 SolidWorks 模型和MATLAB 运动学仿真动平台角度对比
由运动仿真结果可知,该机械手腕动作灵活,可实现三自由度动作,满足设计要求。
4 结束语
本文基于人体手腕结构设计了一种仿生轻量型机械手腕,在建立三维模型的基础上对其进行了运动学建模与仿真,仿真结果表明该手腕可以实现三自由度运动,与人体腕关节运动方式相一致,满足设计要求,但是并未对其进行动力学分析,未来可以利用动力学仿真以优化设计。
仿生机械的发展为人体假肢的不断优化提供了技术支持,本文所设计的机械手腕为腕离断假肢的结构提供了一种设计方案,相信在经过优化设计后可为残障人士带来巨大帮助。
猜你喜欢
设备管理与维修(2022年9期)2022-07-14
初中生学习指导·中考版(2022年4期)2022-05-12
山东冶金(2022年1期)2022-04-19
初中生学习指导·提升版(2020年5期)2020-09-10
制造技术与机床(2019年8期)2019-09-03
精密制造与自动化(2018年1期)2018-04-12
中国机械(2016年1期)2016-06-17
汽车实用技术(2015年8期)2015-12-26
凿岩机械气动工具(2015年1期)2015-11-11
汽车实用技术(2014年7期)2014-02-20