基于CPM 的膝关节康复机的运动分析及结构设计*
2022-06-01 02:33:14姜召军姚世京杨寒松孙婷婷朱金达李文忠
科技创新与生产力 2022年3期
姜召军,姚世京,杨寒松,孙婷婷,朱金达,李文忠,邓 飞
(1.河北瑞华医疗器械有限公司,河北 石家庄 050022;2.石家庄硕和生物科技有限公司,河北 石家庄 050031;3.河北科技大学,河北 石家庄 050018)
膝关节是人体最复杂的关节之一,也是重要的关节之一,在长期直立行走的过程中需要支撑整个身体的重量及其冲击带来的载荷,膝关节由于受力很大,很容易磨损、 功能退化,或因受力不当而发生膝关节损伤,比如各种膝关节炎、 膝关节韧带扭伤、 半月板损伤等。 在连续被动运动 (Continuous Passive Motion,CPM) 概念没有提出前,人们普遍认为膝关节术后患者应长期卧床休息来修复关节韧带、 肌腱,但在长期研究中发现长时间的休息对膝关节痊愈是不利的。 膝关节受到伤病治疗后的恢复过程很漫长,为了缩短康复周期,应及时、 合理安排康复锻炼计划,需要膝关节经常运动,保持运动机能,防止粘连[1]。这就需要医护人员辅助患者进行重复的小腿钟摆运动。 研究证实,小腿钟摆式运动可以有效恢复膝关节活动功能,减轻疼痛程度,缩短住院时间[2]。但是在执行过程中发现由于腿部肌肉具有易疲劳的特性,术后患者每次锻炼时间不能过长,并且这项工作对医护人员体力消耗大的同时消耗时间也长。 然而我国康复技术人员十分缺乏,无法满足广大患者的康复需求,针对这种情况,急需一种自动化的膝关节康复机用于带动小腿做钟摆式运动,进行膝关节康复训练。
膝关节康复机作为一种自动化设备可以帮助患者进行科学有效的康复治疗,以解决国内康复技术人员较少的问题[3-4]。膝关节康复机直接作用于人体,人与机器作为整体协同运动,故可以对不同的患者进行差异化训练,以此来缩短康复周期,提升治疗效果,大大提高患者康复的速度和质量。
1 膝关节运动分析
膝关节的运动主要是小腿绕膝关节的前后低速摆动。 膝关节摆动角度最大不能超过135°[5],且此角度因人而异、 稍有不同,在设计康复机时需采用摆角调节机构以适应不同用户; 小腿摆动速度不宜过快,完成一次摆动需要的最少时间定为2 s。 康复过程中小腿持续被动运动方式为: 患者坐在椅子上,将大腿垫高,小腿自然悬垂,脚脱离地面,医务人员一只手按住大腿,一只手握住脚踝,将患者小腿缓慢抬起到与大腿呈直线位置,再缓慢放下小腿,如此往复。 膝关节康复机需要符合人机工程学,从而使设计出的产品在使用时方便、 舒适,实现预期功能的同时需要安全、 稳定,结构强度满足使用要求,防止患者受到二次伤害。
2 膝关节运动的实现
由于曲柄摇杆机构可以把原动件的连续转动变换为从动件的往复摆动,而且结构简单、 易于制作,因此选择曲柄摇杆机构来实现膝关节的往复运动。 根据设计要求,曲柄旋转一圈为一个行程,小腿摆动一次,一个行程输出端摆动角度为0°~135°。
由摇杆输出的摆动带动小腿运动,在摆动中往返均是工作行程,运动速度相近,因此将该机构设计为无急回特性的曲柄摇杆机构。
在曲柄摇杆机构传力性能分析中,最小传动角是一个非常重要的参数,标志着机构传力性能的好坏。 设曲柄摇杆机构中a 为曲柄长度、 b 为连杆长度、 c 为摇杆长度、 d 为机架长度、 ϕ 为摇杆摆角,则最小传动角为

由式 (1) 可知,摇杆摆角的增大会使机构的最小传动角变小,传力性能变差。 因此,设计的曲柄摇杆机构的摇杆摆角不宜过大,设定最大为60°。为了能够带动小腿摆动135°需要将摇杆的摆角放大135/60=2.25 倍,因此,在摇杆后串联一级齿轮增速机构,其增速比为135/60=2.25,以扩大摆动角度。 同时设置限位装置限制摇杆的摆动范围,使其绝对不能超过人体可承受的摆动角度。
膝关节康复机机构见图1。 曲柄摇杆机构的摆动角度与增速器传动比决定了膝关节的摆动角度。
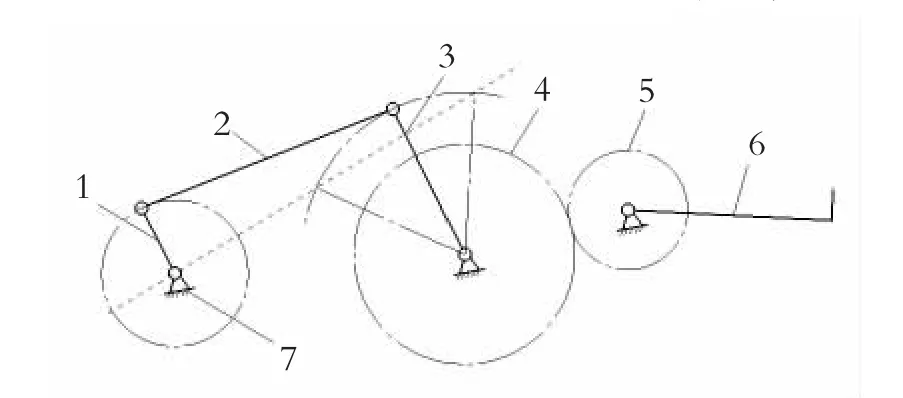
图1 膝关节康复机机构简图
通过分析可知曲柄长度增加时,摇杆摆动角度增大,摆动中心不变。 但是摇杆的摆动极限发生了变化,不能达到小腿伸直的角度,需要调节摇杆的摆动中心。 通过控制连杆长度改变摇杆摆角效果不理想,但可以通过控制连杆长度来调整摆动中心。因此,可以通过调节螺栓和曲柄长度来调整摆动角度,通过调节螺栓改变连杆长度来调整摆动中心。
综上分析,通过控制杆长可以控制摇杆摆动角度和摆动中心。 具体调整方式为: 由曲柄长度来控制摆动角度,由连杆长度来控制摆动中心。 需要注意的是调整的摆角应符合人机工程学。 曲柄摇杆机构模型见图2。 其中,曲柄、 连杆长度的调节由调节螺栓实现。

图2 曲柄摇杆机构模型图
3 小腿固定结构
由于人体膝关节是一个滑车-椭圆形关节[5],不是一个简单的回转中心,在运动中转动中心会产生瞬时变化,是一项多中心的旋转运动。 如果小腿固定结构采用简单的旋转运动机构不合理就会阻碍小腿的摆动。 为此,设计时在脚踏板采用弹簧连接增加机构的柔性(见图3),小腿由绑带放松地捆在小腿固定杆上,但小腿可以上下活动,脚放在脚踏板上,在膝关节摆动时,可通过弹簧的伸缩特性来解决小腿长度的细微变化,将小腿固定的同时保证了患者使用时的舒适性; 同时弹簧拉力可以作用在膝关节上,以模拟走路时膝关节的受力情况。 为了适应不同患者的小腿长度,将脚踏板设计成可上下调节的结构,调节好位置后由锁紧手轮固定。
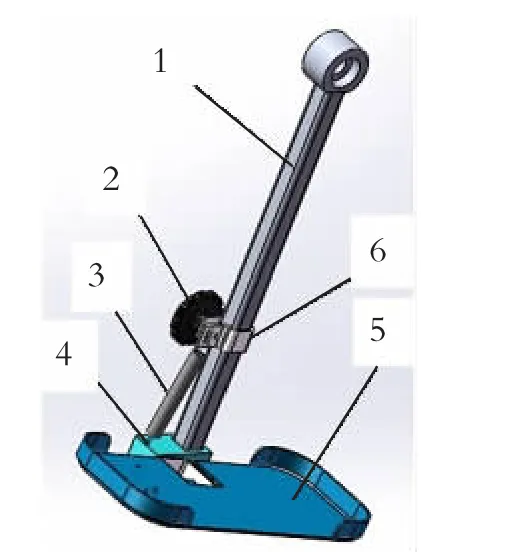
图3 小腿固定结构
4 膝关节康复机模型建立
膝关节康复机的三维模型见第141 页图4。 由座椅和两套对称布置的小腿摆动机构组成。 在每套小腿摆动机构中,由调速电机通过减速器带动曲柄转动,由曲柄摇杆机构获得摇杆的摆动,摇杆与大齿轮固连,一起转动以带动小齿轮转动,从而将摆角放大,最终获得小腿摆动所需的摆角。 用调速器调节电机转速以控制小腿摆动频率,使膝关节得到一个舒适的运动速度。

图4 膝关节康复机三维模型总图
康复机的工作模式可以分为两种: 一是连续运转模式,适用于患者小腿可以正常摆动一定角度的情况,此时电机连续转动,带动小腿以固定的摆角往复摆动,连续工作至所需治疗时间; 二是断续运转模式,适用于患者小腿难以大角度摆动的情况,控制电机缓慢转动带动小腿运动至一个难以忍受的角度,然后使电机反转,将小腿放回,然后重复上述过程,使小腿在可以忍受的范围内摆动,并将摆角逐渐扩大,恢复至正常角度。
5 结束语
为了满足膝关节患者康复治疗的需求,基于CPM 设计了膝关节康复机,由曲柄摇杆机构、 齿轮增速机构将电机的连续转动转换成小腿的往复摆动,为适应膝关节结构设计了小腿固定结构,最终完成了膝关节康复机整体结构的三维模型设计,并进行了仿真分析,验证了运动的可行性。
猜你喜欢
电脑爱好者(2022年5期)2022-05-30 14:58:47
机械工程师(2021年4期)2021-04-19 07:27:56
基层中医药(2021年5期)2021-03-26 23:04:13
南方农机(2021年3期)2021-02-07 09:07:04
湖北农机化(2020年17期)2020-11-02 07:46:54
设备管理与维修(2019年22期)2019-12-19 01:30:12
机械研究与应用(2018年5期)2018-11-05 05:59:38
中成药(2018年10期)2018-10-26 03:41:40
中南大学学报(自然科学版)(2016年2期)2017-01-19 07:36:58
实用手外科杂志(2015年1期)2015-08-27 01:51:58