
基于ESP32-CAM的四旋翼无人机设计简析
2022-05-30 08:38:29王安平项阳沈琴
电脑知识与技术 2022年27期
王安平 项阳 沈琴

摘要:该系统基于Esp32控制器,使用4个820空心杯电机,制作小型四旋翼无人机,能实现空中自平衡,红外自避障,并简要介绍了四旋翼无人机在6个自由度上的控制方法及原理。
关键词:四旋翼无人机;嵌入式应用;ESP32
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2022)27-0086-03
开放科学(资源服务)标识码(OSID):
无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。无人机因为其自由度高,飞行成本低,操控性强等特性适用于一些危险的任务。在军事上以及民用领域都起到相当的关键作用。随着信息网络的发展和科技的进步,无人机的应用邻域还在不断地扩大延伸。
尽管无人机在高空飞行的过程中不会碰到太多的障碍物。但是飞行高度越到上方,空气的流动就越不稳定,温度和气压都会对无人机产生或大或小的影响。因此,四旋翼无人机想要在高空完成稳定并且精准的飞行,必须要借助于成熟的控制算法甚至是一些人工智能的帮助。
物联网被称作计算机和互联网之后的第三次信息技术革命浪潮,以物联网和人工智能为基础的工业理念正成为现实,采用数字化工厂实现全方位、全周期生产管控,可以在制造环节显著提高生产效率并降低质量缺陷率,获得显著的经济效益[1]。智能制造即借助计算机建模仿真和信息通信技术的巨大潜力,优化产品的设计和制造过程[2]。
因此,本文将简易阐述一种基于ESP32-CAM的四旋翼无人机的实现方式,能够利用ESP32的Wi-Fi功能在局域网内建立一个控制页面,操纵者利用手机或者电脑客户端的浏览器对无人机进行访问、配置和控制。并且探讨在微小的扰动下,无人机如何恢复姿态稳定并且保持平衡。
1 无人机构造
本文介绍的无人机采用四旋翼架构,其优点为灵活性高、可操控性强。主控搭载了Ai-Think公司的ESP32-CAM控制器、电机驱动模块、陀螺仪模块、电源模块,红外测距模块以及四个呈对称分布的820空心杯电机及空心杯电机配套的升力桨叶。
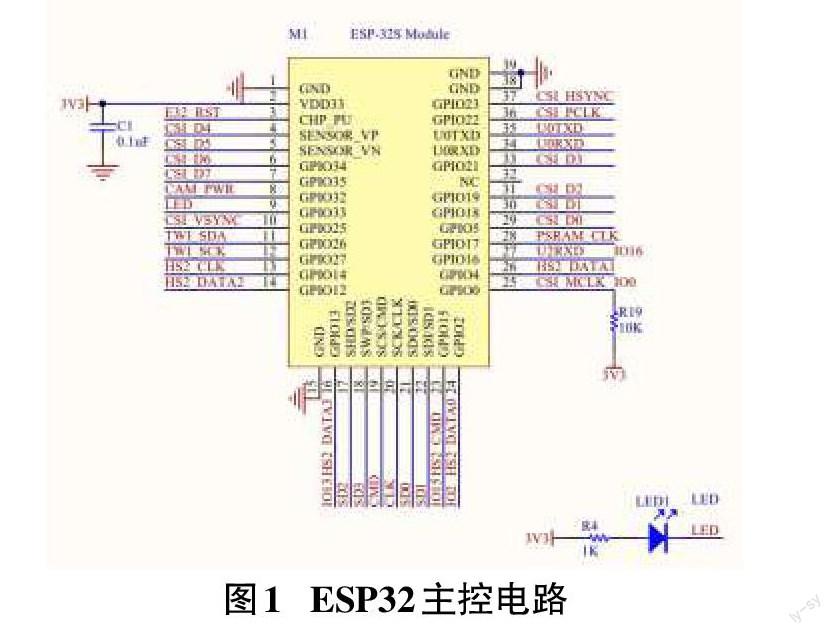
1.1ESP32主控制器
ESP32 是由乐鑫公司推出的一款采用高性能 XTENSA? 32 位 LX6 双核处理器的微控制器,集成了天线开关、射频 balun、功率放大器、低噪声放大器、过滤器和电源管理模块,整个解决方案占用了最少的印刷电路板面积。2.4 GHz Wi-Fi和蓝牙双模芯片采用 TSMC 低功耗 40nm 技术,具有最佳的功耗性能、射频性能、稳定性、通用性和可靠性,适用于各种应用场景和不同功耗需求。
1.2无人机电源
重量分配是无人机设计中一个非常重要的环节。配件重量是否低于无人机空心杯所带来的升力是无人机能否起飞的关键;而配件重量是否相对于无人机呈对称分布,重心是否位于无人机中心点位则是无人机平衡与飞行稳定的关键因素。所以,在配件选择方面,一般更倾向于选择重量较为轻便的装置组成无人机整体。在此次无人机设计中,笔者使用锂聚合物电池,相对于一般电池来说,锂聚合物电池具有超薄化的特性,可以制造成各种小型电池,是小型无人机电池的主流选择方案。
1.3陀螺仪
无人机的平衡是无人机起飞最重要,也是最基础的一个部分,一架无人机能否稳定地处于平衡状态是评判无人机好坏的重要标准。而无人机的平衡则首先要通过陀螺仪得出无人机当前的姿态,再依靠控制算法对空心杯进行控制,使无人机处于平衡状态。本系统采用MPU6050陀螺仪模块,可通过I2C通讯协议向单片机传送三轴角速度及角加速度,并自带旋转矩阵、四元数、欧拉角格式的融合演算。
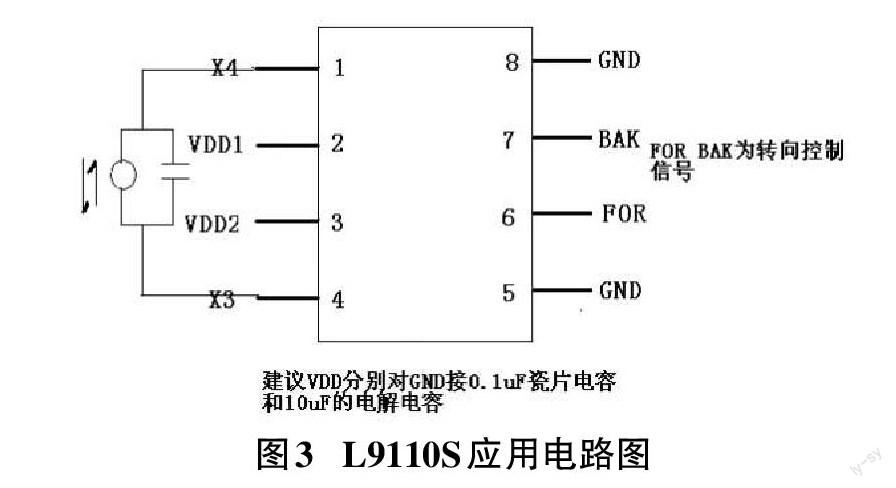
1.4电机驱动
本系统采用4个820空心杯电机提供升力。采用L9110S芯片驱动,L9110S是一款低成本的电机驱动电路芯片,其小巧的体积以及广泛应用于无人机以及玩具汽车等嵌入式产品。通过ESP32-CAM引脚上产生的PWM信号,L9110S会依据其占空比使用电源的高电压直接驱动空心杯,电路设计如下:
1.5无人机外形
无人机在飞行移动的过程中,不断变化的气流以及运动时受到的风阻都会在一定程度上削弱无人机的飞行稳定性和运动精准度。为了使无人机所受到的干扰尽可能减小,无人机的外形采用了对称结构设计,空心杯的承受架尽可能做到细小轻便,为桨叶产生的气流腾出空间以产生更大的升力,帮助无人机完成飞行活动。
2 无人机基本控制
无人机的控制分为:起飞降落、上升下降、偏航运动、滚转运动、俯仰运动以及由以上基本动作组合而成的复合运动。
2.1上升与下降
无人机在竖直方向移动的过程中主要受到两个作用力,无人机整机自身的重力(G)以及由空心杯电机带动螺旋桨所带来的升力(F)。当无人机的升力大于无人机的重力时,无人机将会呈上升状态,当无人机的升力小于无人机的重力时,无人机将逐渐下降,当无人机的升力与重力相等,无人机将保持一定高度的稳定。
当控制单元输出高频率的PWM到空心杯电机,无人机的升力将过分大于重力,此时无人机将快速上升,其上升的速度满足以下公式:
其中v得出的是无人机快速升高的速度,同理无人机在下降的过程中同样也满足以上公式。
2.2偏航运动
无人机的偏航运动,也就是无人机绕自身中心点進行平面旋转的过程,其物理原理是无人机空心杯旋转所带来的扭矩。
如图5所示,如果增加1号空心杯与4号空心杯的旋转角速度,减少2号空心杯与3号空心杯的旋转角速度,便可以使无人机绕着无人机中心逆时针转动;反之,如果减少1号空心杯与4号空心杯的旋转角速度,增加2号空心杯与3号空心杯的旋转角速度,便可以使无人机绕着无人机中心顺时针转动。如果想要无人机不围绕中心做任何转动,便要求2、3号电机的旋转角速度与1、4号电机的旋转角速度达到微妙的动态平衡,此功能利用后文介绍到的自动控制算法可以实现。
2.3偏航运动
无人机的滚转运动与俯仰运动在实质上可归类为一种运动,只是基于不同坐标轴的不同表现。此处笔者着重讨论俯仰运动为例。想要无人机完成俯仰运动,只需要控制前方的两个电机与后方的两个电机同时做出不一样的功率输出即可,即减弱前两个电机的旋转角速度,讓无人机的前端升力略小于重力,使得前端微微向下倾斜;抬升后端两个电机的旋转角速度,让无人机后端的升力大于重力,使得后端微微上翘,即无人机整体便完成俯仰运动中的俯动作;同理,增加前两个电机的功率减小后两个电机的功率即可以完成仰头动作。
3 无人机的校准与自平衡
3.1 无人机的校准
无人机的校准是无人机达到平衡的第一步,无人机校准分为陀螺仪的校准以及无人机整机的校准。其中陀螺仪校准是消除温度气压及其微小环境因素所带来的数据偏差,以得出最准确的角速度以及角加速度。无人机整机校准则是输入初始零位角给单片机。无人机整机校准的具体方式为:将无人机放置到水平的地面上,保持其稳定并且周围没有微风与气流,轻轻按下校准按键,静静等待直至校准信号指示灯亮起,在等待过程中不要触碰无人机整机或改变其位置与姿态。在得到零位角以及准确的角速度以及角加速度后,运用自动控制算法将零位角与由角速度以及角加速度计算出的欧拉角所得到的偏差进行换算,得到应输出给空心杯电机的PWM信号,从而改变空心杯的旋转角速度来稳定无人机。
3.2 无人机飞行控制理论
针对无人机飞行平稳性的问题,大多都是通过传统的PID控制、滑模控制、反步法、鲁棒控制等算法来实现的[3]。在本系统中笔者采用最简单传统的无人机控制算法作为基础,即经典的PID控制算法对无人机进行平衡控制。
在进行算法控制之前,首先需要得到算法需要的数据,也就是欧拉角,通过MPU6050得到的角速度以及角加速度代入如下计算公式,即可计算出欧拉角中的pitch(俯仰角)和roll(滚转角)。
当得到无人机的欧拉角后,将其作为无人机当前的姿态数值代入算式,同时设定一个无人机飞行的期望数值,一般情况下无人机飞行的期望数值可以由无人机校准时的零位值代替。将两者带入PID算法的公式:
同时根据公式以及得出的数据,在单片机中进行算法的编写,通过比例、积分、微分,最终得出4个空心杯的PWM值,再通过电机驱动输出到820空心杯电机上。
3.3无人机飞行控制理论
小型无人机的应用场景多见于低空飞行或者是室内飞行,在此条件下,无人机躲避障碍物就成了一个非常关键的功能。
在无人机四周装载上红外测距模块,在无人机的飞行过程中,时刻检测无人机距离周围障碍物的距离,判断是否到达危险区域。
当无人机在某方向上的障碍物小于设定的危险阈值时,则立刻停止无人机在此方向上移动的速度分量,改变空心杯的运转方式使其稳定在当前位置甚至往反方向进行适当路程的移动。并且通过远程通信手段给操作者发送危险信号,告知操纵者无人机已经到达危险区域,撤出原有的操作指令,请求新的操作。
红外测距模块避障模式在一定程度上保障了无人机的飞行安全,但也限制了无人机的一些自由度,系统上可以更改无人机危险阈值的配置以及关闭避障功能来恢复无人机的灵活度。再利用局部网络或互联网等通信技术把传感器、控制器、机器、人和物等通过新的方式联系在一起,形成人与物、物与物相联,实现信息化、远程管理控制和智能化的网络[4]。
4 结束语
四旋翼无人机通过各种传感器获得的数据,通过算法将这些数据换算成空心杯电机的功率,其所带来的无人机整体四个端点的升力的不同组合,使无人机完成各种复杂的动作或者是精准稳定的悬停。其超高的自由度以及低成本等优势决定了四旋翼无人机在今日不可撼动的地位。如今四旋翼无人机已经可以完成各种各样复杂的任务,将5G通信技术下的大数据与AI、泛互联网相结合,完善互补运行机制,将成为当今时代先进的生产力工具[5]。
参考文献:
[1] 周济.智能制造——“中国制造2025”的主攻方向[J].中国机械工程,2015,26(17):2273-2284.
[2] 张曙.工业4.0和智能制造[J].机械设计与制造工程,2014,43(8):1-5.
[3] 王成,杨杰,姚辉,等.四旋翼无人机飞行控制算法综述[J].电光与控制,2018,25(12):53-58.
[4] 陈文伟,朱玉坤,张宁池,等.面向能源互联网的5G关键技术及应用场景研究[J].电力信息与通信技术,2021,19(8):83-90.
[5] 徐晓峰.5G物联网技术驱动下高校真人图书馆服务创新策略研究[J].图书馆工作与研究,2021(8):62-68.
【通联编辑:唐一东】
