
“低慢小”无人机反制装备及关键技术发展需求综述
2022-05-30 13:48张皓吴虎胜彭强
航空兵器 2022年5期
关键词:无人机
张皓 吴虎胜 彭强


摘 要: 随着无人机应用领域的不断扩展,特别是“低慢小”无人机的大规模使用,给国家安全和地区稳定带来了巨大的威胁。因此,研究“低慢小”无人机的反制装备迫在眉睫。本文通过分析无人机的特点以及存在威胁,结合“低慢小”无人机的典型任务场景,引出反制装备需求。在深入研究国内外“低慢小”无人机反制装备现状的前提下,对反制的关键技术及原理、存在的问题进行分析总结,展望了反制装备及关键技术的未来发展趋势及研究方向,为“低慢小”无人机反制的相关研究提供了重要参考。
关键词:无人机;反制技术;反制装备;能力需求;任务场景
中图分类号:TJ765;V279
文献标识码:A
文章编号:1673-5048(2022)05-0043-10
DOI:10.12132/ISSN.1673-5048.2021.0262
0 引 言
2018年1月,13架装有爆炸物的无人机袭击了多个俄军驻叙的基地目标;2018 年8月,2架分别携带1 kg C4炸药的M600无人机,对正在演讲的委内瑞拉总统马杜罗进行袭击;2018年11月,沙特王室在也门前线阵地,遭遇胡塞多架满载导弹的无人机袭击;2020年9~11月,阿塞拜疆和亚美尼亚就纳卡地区的归属问题,爆发武装冲突,首次将无人机作为主战装备,无人机成为主导战争进程、决定战争成败的关键要素,对战局走向发挥了重要作用。“低慢小”无人机数量上的快速增长,给很多国家和地区带来了潜在的安全威胁。无人机安全问题突出,但当前无人机反制技术不够成熟,无法对其进行处置,反制装备也处于初级阶段,无法形成有效的压制。“低慢小”无人机已逐渐成为空中防御体系中迫切需要且不可或缺的组成部分,其反制装备及技术发展也越来越受到关注和重视。
1 “低慢小”无人机的特点及主要威胁
随着自主组网技术、任务动态调整技术、自动化技术及载荷小型化的快速发展,无人机增强了其态势感知能力和抗干扰能力,能够高效协同执行任务,灵活机动性高、抗毁伤能力强。其中“低慢小”无人机具有操作简单、飞行速度低、体积小、成本低廉、可搭载载荷等特点,随着攻击目标、攻击手段、攻击载体的复杂化以及攻击的大规模杀伤化,其不仅能够遂行目标探测侦察、协同火力打击等威胁任务[1-5],还大大增加了隐蔽性和危害性。“低慢小”无人机通过搭载雷达、光电及红外传感器、拍摄载荷、通信中继载荷等,对重点区域及敏感场所进行偷拍摄像和测绘拍照,获取保密信息;通过装载武器、民用危化品和爆炸物,进行火力攻击、恐怖袭击及自杀式打击,造成人员伤亡及军事目标摧毁。
结合“低慢小”无人机的特点,分析反制难点为:(1)机身体积小、材料偏向非金属,而复合及隐身化技术材料的发展,造成探测发现、识别预警的难度增加;(2)无人机技术的获取门槛降低,造成恐怖分子利用其实施恐怖袭击的几率增大;(3)无人机攻击和防护的能力提升,灵活机动性高,造成处置难度增大;(4)无人机搭载载荷的多样化发展,造成未来战争面临抵近侦察、电子干扰、火力引导、自杀式攻击等威胁。
2 “低慢小”无人机典型作用场景及反制装备需求分析
随着“低慢小”无人机技术日趋成熟、性能日益完善,任务性质逐渐由保障性扩展至攻击性作战任务,作为崭新的作战手段,带来了作战样式、作战手段和作战体系的变革,作战优势凸显,展现出了较好的作战运用前景,已经成为具有強破坏力的空中威胁[6-9]。针对“低慢小”无人机可能作用的具体应用场景,深入分析其可能带来的威胁,提出不同的反制应用场景对反制装备的能力需求。
2.1 军事作战场景
在军事作战场景中,由于“低慢小”无人机具有发现难、攻击形式与手段多样,攻击时间地点突发性强的特点,能够执行战术侦察、协同打击、自杀式打击等任务,故反制装备着重需要实现的是预警监视能力和综合对抗能力。 要求反制装备首先能够及时、准确地探测发现目标,形成对目标的预警与识别能力;其次能够无附带损伤地处置目标,形成精准打击、高效毁伤的对抗处置能力。
2.1.1 军事作战目标
在针对军事作战目标的任务中,“低慢小”无人机组成的集群能够充分表现出饱和攻击的优势。2018年1月,叙利亚反对派出动13架小型无人机对俄驻叙空军基地进行集群攻击,其中10架攻击赫梅米姆空军基地,3架攻击塔尔图斯海军基地的一处后勤设施目标。在此军事行动中,叙利亚反政府组织充分利用无人机的飞行高度低和安萨里耶山脉的地理环境对探测信号的遮挡屏蔽作用,使得俄军基地防空雷达在前期均未发现目标。但在翻越安萨里耶山脉时,被俄军部署的防空系统雷达发现,及时发出预警,利用电子战设备对集群无人机进行电子干扰及导航信号诱骗,最终3架被迫降,3架坠毁爆炸,7架被火力击落[9]。
该战例无论是从“低慢小”无人机作战的角度出发,还是从反制“低慢小”无人机作战的角度出发,都值得研究借鉴。从无人机反制角度看,反制装备的发现预警能力是前提,通过综合使用雷达、光电和电子侦察等手段,实现有效识别及严密跟踪。电磁攻击和火力反制能力是关键,其中电磁攻击是充分利用电磁干扰及导航信号诱骗等“软杀伤”手段,破坏无人机集群与遥控者之间的信号连接,使其丧失作战效能;火力反制是利用防空导弹、高炮、激光、微波及捕捉网等“硬杀伤”手段,使其被击落摧毁,实现无人机集群的反制。
2.1.2 军事作战区域
作战分队在作战区域及附近区域活动时,可能处于敌方“低慢小”无人机系统的观测之下。2020年9月,纳卡冲突中,阿塞拜疆采用“察打一体无人机+自杀攻击无人机”的组合方式,使用“苍鹭”、“赫尔墨斯”450等侦察无人机,执行全天候情报侦察与监视任务,构建低空侦察监视网络;使用“旗手”TB-2察打无人机,引导部署在后方的火箭对亚军指挥所、炮军阵地、行军纵队、车辆及交通枢纽等实施火力打击;使用改进的“安-2”无人机进行火力误导和欺骗,消耗其防空武器弹药储备,暴露阵地位置;使用“哈洛普”自杀式无人机,结合远程火箭炮快速火力覆盖,击毁亚军的雷达系统,击溃亚军防空体系,全面夺取了制空权。此次战役通过对亚方作战区域内武器装备和有生力量的大幅度杀伤,造成亚军的重大损失,导致了亚军的失利[10-11]。
在军事作战场景中,“低慢小”无人机可以采用集群方式进行作战区域打击,能够在数量上实现压制,从而在短时间吸引防控火力,故要求反制装备具有应对多个方向和多个批次的无人机袭击的能力。此时,传统的空中拦截或地面火力打击鉴于其对抗成本不对称、多目标抗击难度大等因素,对反制“低慢小”无人机并不适用,应结合军事作战场景下的具体反制方案,部署使用探测预警能力强、杀伤范围大、反应速度快、毁伤效果好的反制装备,可以通过电子干扰、诱骗劫持信号等“软杀伤”方式实现无人机迫降及坠毁,也可以通过激光、微波等定向能武器打击等“硬杀伤”方式实现无人机击落及摧毁。
2.2 非军事作战场景
在非军事作战场景中,由于“低慢小”无人机具有体积小、低空飞行、隐蔽性强、成本低廉、可搭载多类载荷等特点,故反制装备着重需要实现的是对“低慢小”无人机的探测能力和高效精准的处置能力。要求反制装备能够进行及时的监测跟踪、快速的识别定位、准确的干扰欺骗、以及安全且精准的拒止。特别需要注意在人员聚集或流动性强的环境中,反制的前提一定是保证安全。
2.2.1 重点目标区域
(1) 国家重要机构及设施
对于如政府、电视台、广播电台、电力部门、驻外使领馆等国家重要机构和公路、铁路、桥梁等重要交通设施以及仓库、工厂等重点单位,敌对势力和非法分子可能使用无人机进行情报侦察、爆炸袭击等破坏活动;对于看守所、监狱等重要国家暴力机关,特别是高度戒备监狱,鉴于其特殊的危险度及高度的社会关注度,敌对势力和非法分子可能使用无人机进行监视窃密、情报探刺、投掷有毒物质等活动。以上都易造成失泄密甚至是恶性事件的发生,给政治秩序、经济发展、人民生命财产带来极大损失。
无人机反制装备可以选择部署固定式或车载式,对于人群较密集区域可使用干扰阻断、诱骗劫持等技术手段,待无人机安全离开人群上空后进行管制、驱离或迫降;对于较空旷区域,可直接使用激光、微波武器等定向能技术手段,实现高效打击,充分发挥其强毁伤能力。
(2) 重要交通枢纽及区域
对于火车站、高铁站等重要交通枢纽及广场、市中心等人流量大的重要区域,敌对势力和非法分子可能使用微小型无人机进行投掷燃烧物、爆炸物等恐怖活动以及散播传单等反政府活动。
由于交通枢纽及区域存在人流量大的问题,必须把反制装备的安全性需求放在第一位,要求反制装备携带方便、定位精准,具有强侦察探测能力,可实现高精度可视化跟踪及无损伤高效捕获。选择部署固定式或车载式反无人机装备对目标无人机进行探测、管制、网捕等制止行动;另外,还可以将车载式反无人机装备或移动便携式反无人机装备列入巡逻编队,进行巡逻任务。
(3) 国家边境线
一些存在边境冲突的国家,可能会利用小型无人机的摄录及图传功能探查并记录对方军力的部署情况,在对峙阶段还有可能通过无人机播放或抛撒传单进行心理战;另外,一些存在毒品生产、交易的临近国家,毒贩有可能会利用无人机进行运毒等非法活动。
鉴于边境线上存在的不安全因素,要求反制装备具有全天候探测、目标图像实时观看和视频存储功能,且不易受地形和气候的影响。选择部署车载式或单兵移动式反无人机装备对边境进行常规巡逻以及维稳事件后重要地域的特殊时期巡逻,并在一些热点或重要区域部署作用范围大的固定式反无人机装备,防止非法分子利用无人机对维稳、巡查行动进行侦察破坏。
(4) 国家领海区域
岛礁上布置有关键军事设施的国家,以及有岛礁争议的国家或一些妄图对军事力量进行刺探的国家,可能会利用无人机进行非法拍摄、监控录像,对军事部署进行探测和情报侦察。对于主权领海的海域范围,船载无人机装备会对重要舰船的海上安全造成威胁。
在进行执法维权时,要求反制装备具有视频录像及远距传输能力、独立工作及抗干扰能力、高命中率及高毁伤精度。重要岛礁可以选择部署固定式反无人机装备,对非法入侵的无人机进行探测跟踪、导航干扰、拦截管控,在阻断其通信联络的同时缴获其无人机设备,并作为物证手段,占据舆论制高点。海域范围可以选择部署船载机动式反无人机装备,对目标无人机进行干扰压制和协同对抗,保障执法任务的顺利进行,实现国家海上区域安全。
2.2.2 重要活动场景
(1) 非法聚集
对于未按照法律规定申请或者申请未获得许可的集会、游行、示威等非法聚集活动及暴乱、骚乱等突发社会安全事件,组织者或参与者可能会利用无人机航拍功能对现场进行非法拍摄,实时图传,并通过恶意剪辑泄露给敌对或非友好媒体,进行传播,造成重大政治影响。还有部分极端分子会遥控无人机投掷传单、爆炸物、易燃物、有毒物质等造成人员受伤,并与警方进行对抗,对警方控制现场制造困难。
由于非法聚集活动现场人群密集、规模较大、对抗激烈,要求反制装备能够快速架设、灵活机动、精准摧毁或管制,为处置此类行动保驾护航。
(2) 暴力攻击
对于规模较大、对抗激烈、形式多样的暴力攻击活动,非法分子可能会利用人群进行打砸抢烧活动,以此升级事态影响。还有部分非法分子可能会利用小型化无人机对此类事件进行摄录,并截取影像片段进行怀有政治目的的片面宣传,造成不良政治影响,并有可能怂恿更多非法分子加入此类事件,以此升级扩大事态。
由于暴力攻击活动目的各異、诱因复杂、危害严重、对抗激烈,要求反制装备灵活机动性高、连续工作能力强,能够快速探测、精确摧毁,以高效处置能力协助执法人员进行快速压制、分化瓦解暴力攻击人群,以维护国家安全和社会稳定。
(3) 劫持人质
在劫持人质的罪案现场,随着犯罪技术手段及通信技术的提升,犯罪分子可能会利用无人机对外围警力部署进行侦察监控,以及利用无线遥控炸弹威胁人质生命安全来要挟警方,还有可能通过无人机转发信号与外部犯罪分子进行通信。
可以选择部署车载式或单兵移动式无人机反制装备,要求反制装备机动性高、抗干扰能力强、受地形空间影响小,通过对犯罪分子的无人机遥控链路信号、通信信号的干扰阻断,阻止其对外通信及了解警方部署情况,使其难以获取有用信息,为处置行动创造有利条件。
(4) 爆炸袭击
恐怖活动中,恐怖分子可能利用小型无人机投递爆炸控制装置、发射引爆信号和投送爆炸物,对重要目标、重要人物、重要地点发动恐怖袭击,还可能利用无人机携带有毒物质进行播撒,对特定群体进行杀伤。此类袭击活动给人民的生命财产安全造成了极大的威胁。
可以选择部署车载式或单兵移动式无人机反制装备,要求反制装备能够高效侦察探测、精确定位、快速干扰阻断无人机通信及遥控链路、精准摧毁,赢得处置先机,力争在爆炸袭击之前将其消灭在萌芽状态。
3 “低慢小”无人机的反制装备发展现状
3.1 国外发展现状
近年来,随着科学技术的进步及“低慢小”无人机威胁逐渐增加,世界各国纷纷开展了“低慢小”无人机反制技术的研究与反制装备的研制,并开发出不同技术、不同类型、不同平台的“低慢小”无人机反制装备[12-13]。
美军从2012年起就开始制定反无人机战略,依托国防工业的技术研发力量,加快推动反无人机系统的研制与升级,迅速成为推动反无人机领域发展的领头羊。2019年,美国国防部设立反小型无人机联合办公室,负责领导、协调和管理有关事项。2021年1月,美国国防部发布《反小型无人机系统战略》,用以指导美军在本土、海外基地等应对各类型小型无人机威胁,对执行任务中的人员、设施、资产进行安全保护,充分体现出对“低慢小”无人机的战略地位的重视[14]。
2017年,俄罗斯成立了全球首支反无人机电子战部队,专门运用无线电对战无人机。2018年,更是将反无人机集群式袭击列入军事作战训练的必备科目。一直以来,俄罗斯针对各类无人机在技术上的短板及设计上的弱点,进行逐个攻关破解。对于“低慢小”无人机,俄军目前正在完善最新型的ROSC-1反无人机系统,该系统主要用于应对自杀式无人机和配备爆炸物的廉价无人机的攻击,能大幅提高俄军对抗“低慢小”无人机的效率,提升抗击敌方无人机的能力。
近年来,随着反无人机市场的快速扩大以及“低慢小”无人机的普遍使用,日本政府及韩国政府在“低慢小”无人机反制技术上也进行深入探索,加大反制装备的研发力度,力求在反无人机市场上占据一席之地。英国政府专门成立了代号为“COI4”的反无人机信息中心,研究由小型无人机造成的恐怖袭击、危险违禁品运输等;2019年,发布《英国反无人机战略》,提出对小型无人机安全风险的应对策略。同时,法国、德国、瑞典、以色列等越来越多的国家愈加重视“低慢小”无人机的安全威胁问题,通过积极开发反无人机系统,实现对“低慢小”无人机的探测、识别和反制,以期在反“低慢小”无人机领域抢占先机,确保社会和国家的安全。
随着国外“低慢小”无人机反制技术手段及装备的高速发展,反制装备在实际运用中已发挥出优势,但反制技术还不成熟,反制装备也有待发展。如2022年3月15日,美国发布的《反无人机技术报告》中明确指出:反无人机技术成熟度受制于使用权限的限制、技术能力有限以及有破坏关键通信系统的风险。技术能力有限体现在反无人机系统的打击或干扰有效距离有限,干扰或禁用距离仅在300 m左右;存在破坏关键通信系统的风险体现在测试、评估和开发的反无人机装备针对性并不完善,更适用于特殊环境,不适用于军事基地、城市或机场附近等环境,可能会破坏合法和重要的通信系统,以及干扰通信后可能会造成无人机或其他设备坠落、爆炸,从而造成附带伤害及影响。
国外研制的典型“低慢小”无人机反制装备[15-20]如表1所示。
3.2 国内发展现状
近年来,国内反制“低慢小”无人机的技术手段及装备得到了较大发展,但实际任务中反制装备及其相关技术仍难以满足需要。首先,反制技术手段和装备大多适用于较简单的陆地环境,适用于海上空旷、大范围、远距离、海杂波干扰等复杂环境下的技术手段还不够成熟,此类装备还有待发展,需要进一步加大收集与调查研究。其次,适用于城市复杂环境下的探测和处置技术手段还不够成熟,主要表现在复杂地形或强杂波环境中的探测跟踪及目标识别困难,电磁环境中的干扰阻断效果欠佳及欺骗控制难度较大,“硬”杀伤技术可能造成的二次伤害以及缺乏全天候、复杂环境下的协同防控能力等。最后,战场环境中面临无人机“蜂群”的威胁,反制技术及装备的不成熟充分体现在探测发现“低慢小”集群目标的难度大,毁伤成本高且易发生遗漏,若发生遗漏可能会影响战争态势。
4 “低慢小”无人机反制技术手段及关键问题
无人机反制技术是为保护重要人员、重要空地区域,对非法入侵的无人机进行控制的技术[21]。当前,“低慢小”无人机反制领域已有诸多基于不同原理的反制技术,根据其作用形式的不同进行分类[22-27],如图1所示。
4.1 探测识别技术
4.1.1 雷达探测
雷达探测技术[28]是目前最主要的无人机发现方式,是利用无人机机身对电磁波的反射原理对无人机进行监测和定位,但雷达探测不会对所有移动飞行目标做出反应。原因在于无人机采用的高复合新材料具有透波性強的特点,普通雷达难以探测;无人机体积较小,对应的雷达散射面积也较小,致使雷达难以探测到,即便探测到可能也已经距离很近,难以做出反应;“低慢小”无人机产生的回波微弱,与飞鸟等物体的特征相似,增加了雷达识别此类目标的难度。同时,由于无人机雷达散射面积小、受低空以及地海面强杂波影响大、复杂环境下易造成电磁波遮挡,加大了雷达的探测难度,因此雷达探测杂波抑制技术、雷达分布式组网技术的发展就显得十分重要。
4.1.2 光电识别跟踪
光电识别跟踪技术是利用可见光或红外传感器对目标反射或辐射的光波差异来探测识别无人机。由于“低慢小”无人机具有体积小、飞行高度低、速度慢的特点,现阶段对无人机的识别多依赖于光学成像、红外探测方式,但仍然存在技术局限性。无人机体积小,红外辐射低,导致其在红外检测上难度高,可能会出现无人机隐身的结果。其次,“低慢小”无人机红外特征微弱,识别时要与飞鸟、风筝、气球等空中干扰物进行有效区分,可能会存在识别错误。城市环境下易受地面物体遮挡,识别效率也会降低。
4.1.3 无线电监测
无线电监测技术是对侦察到的电磁信号进行监测并采集,通过对其飞控及图传信号的频谱特征的分析,确定无人机机型及其特征,同时能够侦测定位到无人机操作人员,是目前进行无人机探测、识别较为有效的方法。无线电探测装备由于具有轻便小巧的外形尺寸,可满足全天候、全地形、可快速架设移动的部署要求,但在使用中探测频段受设备大小及成本限制,难以探测无线电静默的飞行目标。
4.1.4 声音监测
声音监测技术是利用高灵敏度的声音传感器,对无人机在飞行过程中产生的声音信号进行接收、监测,并将采集的声音信号同无人机音频数据库进行匹配,实现对无人机的监测识别。现阶段的声音探测主要通过识别无人机产生的噪声来实现发现、侦测,主要有音频指纹和声波阵列接收两种方式。这种技术局限性体现在由于无人机飞行过程中造成的声音小,慢速飞行时产生的空气噪声也小,导致检测难度大;对数据库依赖性高、无法识别数据库未知的无人机;若在嘈杂喧嚣环境下,声波几乎无法探測,就算是可以进行侦测,也要在距离较近的情况下才更具参考价值。
上述各探测手段的范围、精度各不相同,难以避免会出现虚警、漏警的情况,特别是在复杂的城市环境中,反制装备的设计应充分考虑各探测手段的特性,灵活采用频谱扫描、雷达、光电、无人机管控网络及人工智能等多方式协同探测,从而建立多侦测方式相结合的全天候、全方位探测系统,大大提高“低慢小”无人机目标的发现概率,有效应对日趋严峻的无人机防控问题。
4.2 干扰阻断技术
4.2.1 电磁干扰
电磁干扰技术是通过发射射频信号,对无人机在飞行过程中产生的电磁波实施干扰,阻断无人机在飞行中的遥控指令回传,实现破坏甚至瘫痪其控制指挥能力的目的[29],从而迫使无人机自行降落或受控返航。
目前的电磁干扰装备操作简单、成本较低,部分装备系统方便携带。其局限性在于电磁干扰的效果不稳定,特别是针对部分具有电磁波屏蔽性能和抗电磁干扰或使用非常规通信频段的机型;此类技术装备对环境要求较高,在城市或人群密集区域容易对环境中正常使用的无线电信号产生影响,对于携带有毒物质或爆炸物的目标无人机,危险系数极高,反制时首先需要关注现场态势,最好是通过远离人群来降低风险,再行处置。
4.2.2 导航信号干扰
导航信号干扰技术是利用信号发生器发出干扰无人机通信的电磁信号,导致无人机飞行中无法依靠卫星导航,难以获得准确信息,实现对无人机的有效干扰。
目前对导航信号干扰的方式大致分为升空干扰、星载干扰及地面干扰。前两种方式的实现要求高、成本高,大多用于军用领域,而地面干扰因其操作灵活性高,可部署使用在不同的干扰任务中。其中车载式GPS干扰能够灵活架设,快速处置,是地面对抗的主要方式;固定式GPS干扰可建立在重点攻防区域,干扰距离更具优势;背负式GPS干扰更适用于突发任务,体积质量小、方便携带及快速移动,适用于重要会议、大型活动等的安防任务。
4.2.3 声波干扰
声波干扰技术[30]是通过发出与无人机陀螺仪频率一致的声波,使陀螺仪共振并输出错误信息,干扰目标无人机稳定飞行,使其最终无法正常飞行并坠毁。
声波干扰技术会对目标无人机造成悬停或空中盘旋、降落、返航。对于前两种响应模式,必须将安全问题放在首要考虑。若在人群密集区域或城市环境中,需要第一时间疏散地面人群并清理地面设施;针对无人机悬停空中的情况,可利用升空设备或网捕技术进行捕获。目前该技术仍处于理论研发阶段,而在声波传播过程中出现的衰减问题会是未来需要解决的技术问题。
4.3 欺骗控制技术
4.3.1 导航信号欺骗
导航信号欺骗技术是通过对接收的无人机导航信号进行时间和多普勒调制,给出虚假导航信息,使导航终端定位到欺骗信号设置的错误位置,实现对目标无人机的返航点及轨迹欺骗。
无人机通常是专业操作人员或预编程序进行控制飞行。目前很多无人机同时具备手动控制功能和程序控制功能,可以灵活地根据任务要求进行选择及切换,对于处于程序控制飞行状态的无人机,难以通过接收操作指令来实现欺骗控制。
4.3.2 无线电信号劫持
无线电信号劫持技术[31]是通过对无人机的链路信号和通信协议进行解析,并利用分析结果,自主产生欺骗信号并注入到链路终端中,实现对目标无人机的控制权。
无线电信号劫持是目前无人机反制领域较为先进的一种技术,先进性更多体现在技术难度大、普适性差。随着科技的不断发展,无人机通信协议与加密算法也在不断升级进步,破解无人机通信协议的难度也逐渐增加。现阶段的局限性主要在于技术上构建和实现难度大,难以大范围推广使用,针对不同的无人机,要有不同的破解方式。若其通信链路在专业技术上实现安全保护,或许就可以最大限度地抵抗这种欺骗控制技术。
4.4 毁伤捕获技术
4.4.1 火炮和防空导弹
火炮和防空导弹技术属于传统的防空模式,是常用的打击无人机的方式。针对飞行重量大、飞行高度高的无人机,可以采用该技术手段对其进行摧毁。随着无人机技术不断发展升级,现代防空系统也在过去防空系统的基础上,扩展了精确制导、电子干扰等技术,具备了目标探测、跟踪制导的能力。
现有的防空武器系统在一定程度能够抗击无人机,但也存在局限性,主要体现在多目标抗击难度大,难以满足无人机集群的作战需求,且随着“低慢小”无人机的普遍使用,火炮和防空导弹因高成本注定难以成为主要的反制手段。
4.4.2 激光武器
激光武器技术[32-33]是利用定向发射的激光束,瘫痪破坏无人机的机载电子设备和光电传感器或直接毁伤目标使之丧失效能的技术。
目前激光武器系统价格高昂且配套系统比较复杂,在实际使用中,激光毁伤属于直接火力打击,故必须考虑击落无人机会造成的次生伤害。该技术装备不适用于人群密集的居民区域或城市环境,且会对目标无人机造成永久性损伤,无法通过其获取有用的情报信息。
4.4.3 微波武器
微波武器技术[34-35]是通过定向辐射电磁波,在短时间内形成能量高度集中、功率高且具有方向性的微波射束,进入无人机机载设备内部对电子元件实施物理破坏,使其失效或失能,从而实现对目标无人机的损伤。
微波武器是当前世界各国军事研究的重点领域之一,通常运用于远距离干扰军事目标及武器的光电设备,近距离杀伤有生目标。其中高功率微波武器集软硬杀伤功能于一体,可用作战略防御,也可用作战术拦截,能够在不同的功率密度下产生不同的作用效能,且在同一系统中实现探测、跟踪、毁伤的无人机反制能力,具有突出的军事前景和作战优势。
4.4.4 网捕
网捕技术是通过缠绕无人机的旋翼来捕获无人机并将其带离任务区域,对可能携带危险物品的无人机,将其带到安全位置,進行无附带损伤的安全处置。
由于“低慢小”无人机本身成本相对较低,若对方采用多批次、分散化的方式就会增大防御方的防控处置压力,从而造成作战成本的上升以及高饱和的防空通道。因此,针对无人机的毁伤捕获技术除常规火力毁伤技术外,还包括激光武器技术、微波武器技术、网捕技术。反制装备通过使用该类技术能够高效组建地面-空中打击网,并依据侦察情报系统提供的情报信息,对目标无人机实施火力摧毁及捕获。
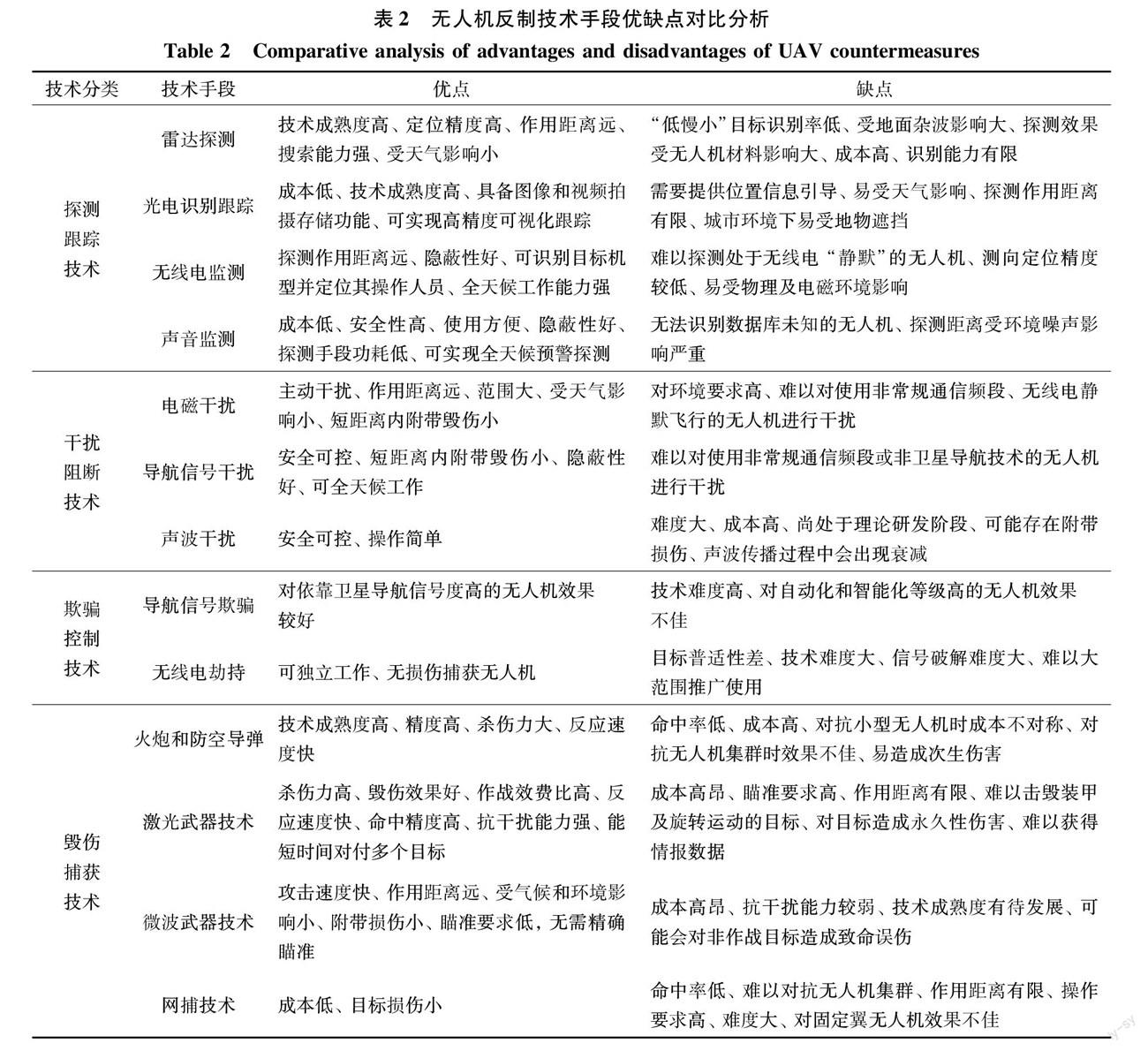
本文从探测识别技术、干扰阻断技术、欺骗控制技术、毁伤捕获技术四个类别对无人机反制的关键技术及原理进行了介绍,并简要分析了各技术发展现状、未来发展趋势及可能需要攻克的关键问题,各技术手段优缺点对比如表2所示。
5 未来发展趋势
5.1 以任务场景为依据,构建能够联合感知的综合集成探测预警系统
“低慢小”无人机探测预警的现存问题在于探测预警距离有限,顶空覆盖能力差,远程识别目标困难。其中雷达探测优势在于探测距离远,可进行轨迹跟踪,但对悬停或低速飞行的目标探测难度大,易受背景杂波及复杂环境影响,虚警率较高。光电探测优势在于可实现对目标的高精度跟踪,精确引导打击,但易受恶劣天气的影响,主动搜索能力差,需要其他手段提供位置信息引导。无线电探测优势在于能够识别无人机机型,隐蔽性好,但受电磁环境影响大,城市环境使用局限性高,且无法监测处于无线电“静默”状态的无人机。未来在探测预警方面,为了增强无人机全天候侦察探测能力,综合集成雷达探测、光电探测、无线电探测等技术手段,通过分布式组网、联合感知,实现在不同任务场景下,对无人机目标全天候、全方位、多手段的侦察探测和跟踪监视。
5.2 以能力需求为导向,构建“软硬杀伤”联合打击的无人机反制系统
针对“低慢小”无人机高度依赖控制链路的特点,采取电磁干扰阻断、信号欺骗压制,即通过对无人机遥控信号及图传、数传信号进行干扰或使用无线电攻击技术,阻断、隔绝地面控制站向无人机发射的上行无线电控制信号,最终使无人机因无法收到指令信息,或原地迫降,或处于引导位置上空盘旋等待通联,或原航线返回。这类软杀伤适用于反制人员密集区域上空的无人机。
硬杀伤则是使用防空导弹、高射炮等传统防空武器进行火力打击,或使用定向能武器破坏或击毁无人机的核心部件,达到直接摧毁无人机的目的。激光、微波、电磁脉冲等定向能武器具有打击速度快、拦截效果好和效费比高等优势,在应对无人机安全威胁方面也更具优势。这类武器不仅能够提供更高的精度、更快的速度,而且操作更安全,比传统动能武器的性价比更高。
未来发展需要分析实际场景,根据执行不同任务的需求,构建“软”“硬”杀伤联合使用、配合高效、均能发挥所长的无人机反制系统。
5.3 以人工智能为牵引,构建具有作战能力的智能化反无人机集群系统
人工智能广泛应用于军事领域,极大地促进了智能化武器装备的发展。人工智能具有强大的深度学习能力,使得智能化武器装备具有很强的自主能力,如战场自主感知、行动自主决策、作战自主攻击、协同自主配合、战后自主评估等。
人工智能在反无人机领域的应用,更多体现在可以更快理解战场态势,在数据处理、数据分析方面发挥优势,对关键的作战决策支持数据进行最优化处理,为决策者提供辅助及多种行动方案选择。
探索人工智能在反无人机领域的应用,构建具备感知、判断、规划、决策、协同的自主能力的智能化反无人机集群系统将成为未来的发展趋势。
6 结 束 语
随着“低慢小”无人机在军事领域展现出的强劲的威胁挑战,其反制技术越来越受到重视,成为众多研究学者以及军事强国需要重点研究的课题。本文梳理了无人机的特点及存在的威胁,通过分析“低慢小”无人机的典型作用场景,提出了相应的反制装备能力需求。通过对国内外“低慢小”无人机反制装备的现状分析,结合反制技术原理、优缺点及现存关键问题,对未来无人机反制装备的发展趋势进行展望,期望能够对未来无人机反制领域的发展起到一定的启示作用,推动反无人机技术在与无人机技术“相互斗争”中不断发展和完善。
参考文献:
[1] 刘玉文, 廖小兵, 蒋明, 等. 反无人机技术体系基本框架构建[J]. 四川兵工学报, 2015, 36(10): 18-20.
Liu Yuwen, Liao Xiaobing, Jiang Ming, et al. Basic Frame Constructing of Counter UAV Technique[J]. Journal of Sichuan Ordnance, 2015, 36(10): 18-20.(in Chinese)
[2] 谢谙. 美国陆军发布反无人机技术手册[J]. 现代军事, 2017(7): 91-100.
Xie An. US Army Releases Anti-UAV Technical Manual[J]. Conmilit, 2017(7): 91-100.(in Chinese)
[3] 向文豪, 王棟, 刘佳, 等. 无人机反制需求分析与技术谱系[J]. 科技导报, 2020, 38(21): 150-158.
Xiang Wenhao, Wang Dong, Liu Jia, et al. UAV-Counter Requirements Analysis and Technical Pedigree[J]. Science & Technology Review, 2020, 38(21): 150-158.(in Chinese)
[4] 姜进晶, 汪民乐, 姜斌. 无人机作战运用研究[J]. 飞航导弹, 2019(1): 41-44.
Jiang Jinjing, Wang Minle, Jiang Bin. Research on Operational Application of UAV[J]. Aerodynamic Missile Journal, 2019(1): 41-44.(in Chinese)
[5] 李牧, 王文庆. 无人机特点分类与低空威胁分析[J]. 中国安全防范技术与应用, 2019(2): 49-53.
Li Mu, Wang Wenqing.UAV Characteristics Classification and Low-Altitude Threat Analysis[J]. China Security Protection Technology and Application, 2019(2): 49-53.(in Chinese)
[6] Kratky M, Minarik V. The Non-Destructive Methods of Fight Against UAVs[C]∥International Conference on Military Technologies (ICMT), 2017: 690-694.
[7] 马权.无人机的威胁[J].中国空军,2015(3):72.
Ma Quan. The Threat of Drones [J]. Chinese Air Force, 2015 (3): 72.(in Chinese)
[8] 杨勇, 王诚, 吴洋. 反无人机策略及武器装备现状与发展动向[J]. 飞航导弹, 2013(8): 27-31.
Yang Yong, Wang Cheng, Wu Yang. Anti-UAV Strategy and Current Status and Development Trend of Weapon Equipment[J]. Aero-dynamic Missile Journal, 2013(8): 27-31.(in Chinese)
[9] 张华伟, 刘海鹏, 史春鹏. 反低慢小无人机技术发展研究[J]. 光电技术应用, 2021, 36(3): 7-10.
Zhang Huawei, Liu Haipeng, Shi Chunpeng. Research on Development of Anti Low-Altitude and Slow-Speed Small Unmanned Aerial Vehicle Technology[J]. Electro-Optic Technology Application, 2021, 36(3): 7-10.(in Chinese)
[10] 吴静, 蔡海锋, 刘俊良. 纳卡地区冲突无人机攻防运用分析及地空反无人对策建议[J]. 现代防御技术, 2021, 49(3): 13-20.
Wu Jing, Cai Haifeng, Liu Junliang. Analysis on the Operation of Attack and Defense of UAVs in Naka Conflict and Suggestions for Ground-to-Air Anti-UAVs[J]. Modern Defence Technology, 2021, 49(3): 13-20.(in Chinese)
[11] 苏润丛, 向文豪, 缪国春, 等. 纳卡冲突中无人机的作战应用与分析[J]. 飞航导弹, 2021(1): 65-70.
Su Runcong, Xiang Wenhao, Miao Guochun, et al. Operational Application and Analysis of UAVs in the Naka Conflict[J]. Aerodynamic Missile Journal, 2021(1): 65-70.(in Chinese)
[12] 罗淮鸿, 卢盈齐. 国外反“低慢小”无人机能力现状与发展趋势[J]. 飞航导弹, 2019(6): 32-36.
Luo Huaihong, Lu Yingqi.Current Situation and Development Trend of Foreign Anti-“Low, Slow and Small” UAV Capabilities[J]. Aerodynamic Missile Journal, 2019(6): 32-36.(in Chinese)
[13] 罗斌, 黄宇超, 周昊. 国外反无人机系统发展现状综述[J].飞航导弹, 2017(9): 24-28.
Luo Bin, Huang Yuchao, Zhou Hao.A Review of the Development Status of Foreign Anti-UAV Systems[J]. Aerodynamic Missile Journal, 2017(9): 24-28.(in Chinese)
[14] 刘丽, 魏雁飞, 张宇涵. 美军反无人机技术装备发展解析[J]. 航天电子对抗, 2017, 33(1): 60-64.
Liu Li, Wei Yanfei, Zhang Yuhan. The Development of Anti-UAV Technical Equipment of the U.S. Armed Forces[J]. Aerospace Electronic Warfare, 2017, 33(1): 60-64.(in Chinese)
[15] 李明明, 卞伟伟, 甄亚欣. 国外“低慢小”航空器防控装备发展现状分析[J]. 飞航导弹, 2017(1): 62-70.
Li Mingming, Bian Weiwei, Zhen Yaxin.Analysis of the Development Status of Foreign “Low, Slow and Small” Aircraft Prevention and Control Equipment[J]. Aerodynamic Missile Journal, 2017(1): 62-70.(in Chinese)
[16] 石红梅, 谭晃. 国外无人机监管及反制技术最新发展概况[J]. 中国安防, 2016(4): 100-105.
Shi Hongmei, Tan Huang. The Latest Development of Foreign Drone Supervision and Countermeasure Technology[J]. China Security & Protection, 2016(4): 100-105.(in Chinese)
[17] 龚钰哲, 岳松堂, 杜浩宁. 2015年度外军陆军防空反导装备发展综述[J]. 现代军事, 2016(3): 53-58.
Gong Yuzhe, Yue Songtang, Du Haoning.Overview of the Deve-lopment of Foreign Military Air Defense and Antimissile Equipment in 2015[J]. Conmilit, 2016(3): 53-58.(in Chinese)
[18] 反无人机进行时: 美国巴特勒“无人机防御者”步枪[J]. 轻兵器, 2016(3): 14-15.
When the Anti-UAV is Underway: American Butlers “UAV Defender” Rifle [J]. Small Arms, 2016(3): 14-15.(in Chinese)
[19] 陳晶. 解析美海军低成本无人机蜂群技术[J]. 飞航导弹, 2016(1): 24-26.
Chen Jing.Analysis of the US Navys Low-Cost UAV Swarm Technology[J]. Aerodynamic Missile Journal, 2016(1): 24-26.(in Chinese)
[20] 郑大壮. 波音新力作: 反无人机激光武器系统[J]. 轻兵器, 2016(4): 53-54.
Zheng Dazhuang.Boeings New Masterpiece: Anti-UAV Laser Weapon System[J]. Small Arms, 2016(4): 53-54.(in Chinese)
[21] 蔡亚梅, 姜宇航, 赵霜. 国外反无人机系统发展动态与趋势分析[J]. 航天电子对抗, 2017, 33(2): 59-64.
Cai Yamei, Jiang Yuhang, Zhao Shuang. Development Status and Trend Analysis of Counter UAV Systems[J]. Aerospace Electronic Warfare, 2017, 33(2): 59-64.(in Chinese)
[22] Park J. Application of the Small UAV Defense System[J]. The Journal of Advanced Navigation Technology, 2017, 21(1): 145-152.
[23] 孙非, 何昌见, 曲一, 等. “低慢小”无人飞行器反制技术综述[J]. 中国安全防范技术与应用, 2018(6): 54-57.
Sun Fei, He Changjian, Qu Yi, et al. Overview of “Low, Slow, Small” Unmanned Aerial Vehicle Countermeasure Technology[J]. China Security Protection Technology and Application, 2018(6): 54-57.(in Chinese)
[24] 郭珊珊. 反无人机技术与产品发展现状[J]. 军事文摘, 2016(19): 36-39.
Guo Shanshan.The Development Status of Anti-UAV Technology and Products[J]. Military Digest, 2016(19): 36-39.(in Chinese)
[25] 张静, 张科, 王靖宇, 等. 低空反无人机技术现状与发展趋势[J]. 航空工程进展, 2018, 9(1): 1-8.
Zhang Jing, Zhang Ke, Wang Jingyu, et al. A Survey on Anti-UAV Technology and Its Future Trend[J]. Advances in Aeronautical Science and Engineering, 2018, 9(1): 1-8.(in Chinese)
[26] 柏如玉. 国内外反无人机技术发展分析[J]. 中国安防, 2016(9): 31-34.
Bai Ruyu.Analysis of the Development of Anti-UAV Technology at Home and Abroad[J]. China Security & Protection, 2016(9): 31-34.(in Chinese)
[27] 薛猛, 周学文, 孔维亮. 反无人机系统研究现状及关键技术分析[J]. 飞航导弹, 2021(5): 52-56.
Xue Meng, Zhou Xuewen, Kong Weiliang.Research Status and Key Technology Analysis of Anti-UAV Systems[J]. Aerodynamic Missile Journal, 2021(5): 52-56.(in Chinese)
[28] 马雯, 叱干小玄. 反无人机技术发展研究[J]. 航空兵器, 2020, 27(6): 19-24.
Ma Wen, Chigan Xiaoxuan. Research on Development of Anti-UAV Technology[J]. Aero Weaponry, 2020, 27(6): 19-24.(in Chinese)
[29] 蒋镕圻, 白若楷, 彭月平. 低慢小无人机目标探测技术综述[J]. 飞航导弹, 2020(9): 100-105.
Jiang Rongqi, Bai Ruokai, Peng Yueping.Summarization of Low and Slow Target Detection Technology for Small UAV[J]. Aerodynamic Missile Journal, 2020(9): 100-105.(in Chinese)
[30] 胡文娟, 张翔, 陈俊杰. 无人机监管服务系统的设计与实现[J]. 中国民航飞行学院学报, 2017, 28(3): 5-8.
Hu Wenjuan, Zhang Xiang, Chen Junjie. Design and Implementation of UAV Regulatory Service System[J]. Journal of Civil Aviation Flight University of China, 2017, 28(3): 5-8.(in Chinese)
[31] 施林, 劉伟. 基于卫星导航欺骗干扰的无人机管制技术[J]. 指挥信息系统与技术, 2017, 8(1): 22-26.
Shi Lin, Liu Wei. UAV Management and Control Technology Based on Satellite Navigation Spoofing Jamming[J]. Command Information System and Technology, 2017, 8(1): 22-26.(in Chinese)
[32] 李富良, 胡荣, 韩涛, 等. 俄罗斯反无人机策略与装备发展现状[J]. 飞航导弹, 2019(9): 53-58.
Li Fuliang, Hu Rong, Han Tao, et al.The Development Status of Anti-UAV Strategy and Equipment in Russia[J]. Aerodynamic Missile Journal, 2019(9): 53-58.(in Chinese)
[33] 禹化龙, 伍尚慧. 美军定向能武器反无人机技术进展[J]. 国防科技, 2019, 40(6): 42-47.
Yu Hualong, Wu Shanghui. Progress and Development Trend Analysis on US Directed Energy Weapons Against Unmanned Aerial Vehicles[J]. National Defense Technology, 2019, 40(6): 42-47.(in Chinese)
[34] 介冲, 苗壮, 叶婷婷. 美军现役反无人机系统发展研究[J]. 飞航导弹, 2020(12): 36-42.
Jie Chong, Miao Zhuang, Ye Tingting.Research on the Development of Active Anti-UAV System in the US Army[J]. Aerodynamic Missile Journal, 2020(12): 36-42.(in Chinese)
[35] 张颜颜, 陈宏, 鄢振麟, 等. 高功率微波反无人机技术[J]. 电子信息对抗技术, 2020, 35(4): 39-43.
Zhang Yanyan, Chen Hong, Yan Zhenlin, et al. The Technology of High-Power Microwave Anti-Bee Swarm Drone[J]. Electronic Information Warfare Technology, 2020, 35(4): 39-43.(in Chinese)
Summary of Development Requirements of “Low, Slow and Small”
UAV Countermeasure Equipment and Key Technologies
Zhang Hao,Wu Husheng*,Peng Qiang
(Engineering University of PAP,Xian 710086,China)
Abstract: With the continuous expansion of UAV applications, especially the large-scale use of “low, slow and small” UAV, it has brought a huge threat to national security and regional stability. Therefore, it is urgent to study the countermeasure equipment of “low, slow and small” UAV. By analyzing the characteristics and threats of UAV, combined with the typical mission scenarios of “low, slow and small” UAV, the requirements of countermeasure equipment is drawn. On the premise of in-depth study of the current situation of “low, slow and small”UAV countermeasure equipment at home and abroad, this paper analyzes and summarizes the key technologies, principles and existing problems of countermeasures, looks forward to the future development trend and research direction of countermeasure equipment and key technologies, and provides an important reference for the relevant research of “low, slow and small” UAV countermeasures.
Key words: UAV;countermeasure technology;countermeasure equipment;capability requirement;mission scenario
收稿日期:2021-12-31
基金项目:陕西省自然科学基金项目(2020JQ-493);装备综合研究项目(WJ20211A030018;
WJ20211A030021);武警工程大学基础理论研究基金项目(WJY202148)
作者简介:张皓(1993-),女,青海西宁人,硕士。
通信作者:吳虎胜(1986-),男,湖北荆门人,副教授。
猜你喜欢
电脑知识与技术(2016年28期)2016-12-21
新教育时代·教师版(2016年27期)2016-12-06
农机使用与维修(2016年10期)2016-11-10
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26
