NOMA物联网下多UAV辅助MEC系统的资源分配*
2022-05-27 03:36李海翠刁宪邦张校晨尚志会杨莲新
电讯技术 2022年5期
李海翠,刁宪邦,张校晨,尚志会,杨莲新
(1.中国人民解放军陆军工程大学 通信工程学院,南京 211100;2.国防科技大学 电子科学学院,长沙 410003)
0 引 言
物联网(Internet of Things,IoT)是未来移动通信网络的重要组成部分,它可以连接来自不同环境的大量设备,支持许多新颖的应用。然而,IoT设备的大规模互连所产生的大量数据、IoT设备体积偏小、电池能量较为有限以及计算能力较弱等缺陷对IoT的发展带来了严峻的挑战。为解决这些问题,多址边缘计算(Multi-access Edge Computing,MEC)和非正交多址接入(Non-orthogonal Multiple Access,NOMA)技术所结合的系统应运而生。
近年来,研究者们开始研究基于NOMA的MEC系统,目的是最大化 NOMA在 MEC 系统中的潜在增益。大多数的作者均是通过优化终端设备分簇、计算资源、通信信道分配策略或终端设备传输功率来最小化所有终端设备的总能耗、总时延以及总开销,少数作者则通过设计迁移架构达到满足设备计算需求的目的。然而,对于偏远山区和受灾地区,由于没有基站或基站被破坏,IoT设备靠自身的计算能力无法完成计算任务。此时,无人机(Unmanned Aerial Vehicle,UAV)的部署灵活、响应迅速等优势为应对此问题提供了解决思路。UAV可以在悬停模式下按需部署,更适合IoT的无线传输。由于其空中优势,可以获得更好的视距链路,若将MEC服务器部署至UAV上,IoT设备便能够在离服务器足够近的地方发送信息[1-4]。文献[5-8]研究的均是无人机辅助下基于NOMA的MEC系统,文献[5-7]中均是单无人场景,文献[8]研究的多无人机场景;文献[5-7]在优化UAV轨迹时对每个时隙IoT设备的排序都是固定的,而文献[8]优化UAV轨迹时用的是上一时隙的IoT设备的排序。
综上所述,关于NOMA-IoT中多UAV辅助MEC系统的研究还处于初级阶段,研究此系统是非常有意义的。为了最小化系统总能耗,设计合理的计算资源分配和功率分配策略为重中之重。然而NOMA的引入必然导致同信道干扰,可以通过优化卸载策略得到对每个设备来说同信道干扰小的设备组,而且可以使固定的MEC服务器针对特定设备组进行服务,从而设备分配到更多的计算资源,最终减少系统总能耗。此外,若UAV的轨迹未知,则下一时隙连续干扰消除的排序变未知,从而传输数据量便无法获得,最终优化问题便无法获得。因此,受上述文献启发,本文对NOMA-IoT场景中多UAV辅助的MEC系统进行研究,具体是固定UAV的轨迹,对每个时隙的IoT卸载策略、计算资源和发射功率进行联合优化,以最小化所有设备的本地计算和卸载过程能耗以及MEC服务器计算能耗的加权和。
1 系统模型
1.1 网络模型
考虑IoT中一个区域突发地震,附近的基站均被破坏,地面多个IoT设备都有一个高复杂度的计算任务需要在时间间隔T内完成。由于IoT设备计算能力及能量有限,MEC服务器具有更强大的计算能力,IoT设备可以将计算任务卸载到MEC服务器。采用多个配备MEC服务器的UAV来协助IoT设备完成计算任务,UAV按照固定轨迹飞行,多个IoT设备采用上行NOMA方式将计算任务卸载至多UAV配备的MEC服务器上。具体系统模型图如图1所示。
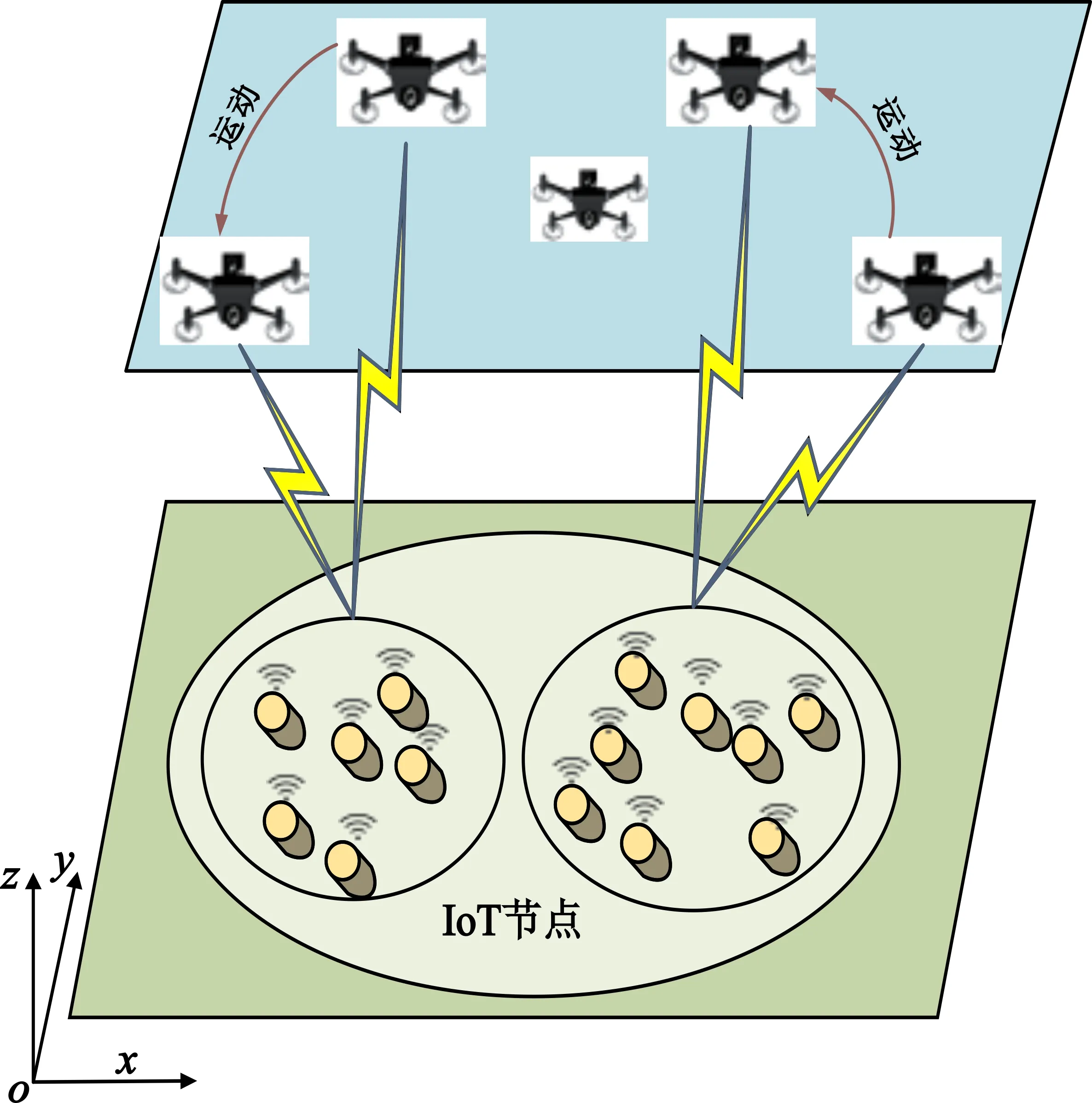
图1 系统模型图
1.2 信道模型
在UAV飞行过程中,周围可能会有其他物体充当散射体或障碍物,导致UAV和IoT设备之间的通信中断。因此在对信道进行建模时,必须同时考虑视距链路(Line of Sight,LoS)和非视距链路(Non-Line of Sight,NLoS),根据两者出现的概率进行平均以求得信道增益。LoS/NLoS概率取决于环境、设备和UAV的位置以及仰角。在第n个时隙时,假设IoT设备i将计算任务卸载至UAVm上,则两者之间的仰角和直线距离可写为
(1)
根据文献[8],LoS /NLoS的概率可写为
(2)
式中:a和b是取决于载波频率和环境类型的参数。
因此,设备i和UAVm之间LoS和NLoS的路径损耗为
(3)
式中:fc是载波频率,ζ是路径损耗系数,η1和η2分别代表LoS和NLoS的大尺度路径损耗系数,c代表光速。
(4)
(5)
1.3 任务执行模型
假设IoT设备i要完成的计算任务比特数是Ii。采用部分卸载方式,即每个用户进行本地计算的同时也可以将部分任务卸载到UAV上配备的MEC服务器,本地计算和远程卸载计算的比特数不得超过任务总比特数[1]。因此,在第n个时隙时IoT设备i本地计算完成的比特数为
(6)

对于卸载而言,定义αi,m为二进制变量。由于一个设备至多只能将计算任务卸载至一个UAV上,所以αi,m必须满足
(7)

此外,由于该过程是离散化的,并且时隙是最小的动作单位,所以MEC服务器只能计算在前一时隙中卸载的计算任务。因此,当没有任务被卸载时,第一个时隙不应该分配资源。另一方面,在第N个时隙时将任务卸载到UAV也是不合理的,因为在该周期结束后不再对卸载的计算任务进行计算。
1.4 能耗模型

(8)
(9)

(10)
1.5 问题公式化
根据前面的分析,可以得到系统的效用函数为

(11)
式中:非负参数ωuser和ωuav代表IoT设备和UAV的权重,满足ωuser+ωuav=1。本文的目标是通过联合优化卸载策略和资源分配(本地计算的CPU频率、UAV计算的CPU频率以及IoT设备的发射功率)最小化系统中IoT设备和UAV的加权总能耗,以提升系统性能,因此优化问题可写为
(12a)
s.t.
C1:αi,n,m={0,1},
(12b)
(12c)
(12d)
(12e)
(12f)
(12g)
(12h)

显然,问题P0是一个混合整数非线性规划问题,它由二进制、整数和实数变量组成,目标函数是非凸函数,因此无法利用凸优化直接解决该问题。从式(11)中可以发现,卸载策略α独立于发射功率p、CPU频率fuser和服务器的CPU频率fuav,因此可以将每个时隙的卸载策略、联合计算资源和功率分配分开优化,将其分为卸载策略和联合计算资源和功率分配子问题。本文针对卸载策略子问题将其建模为联盟形成博弈,针对计算资源和发射功率优化问题采用连续凸逼近将其转化为可解的凸问题,并提出一种高效的优化算法对联合计算资源和功率分配子问题进行求解,通过交替求解这两个子问题来找到原问题的收敛次优解。
2 联合卸载策略和资源分配算法
2.1 计算资源和功率分配算法
首先将IoT设备根据与UAV的距离远近对联盟进行初始化,获得卸载策略,给定UAV的轨迹,假设IoT设备i将计算任务卸载至UAVm,此时优化计算资源和通信资源的子问题P1可以写为

(13a)
s.t.
(13b)
(13c)
(13d)
(13e)
(13f)
式中,虽然目标函数是凸函数,但由于约束C7的存在仍使得问题难以求解,为了要解决P1,可以将其变换为目标函数为凸的等价形式,并对约束条件进行变换。
根据公式(10),通过换底公式可以得到
(14)
令
(15)
然后,利用递推公式可以得到
(16)
因此,可以得到
(17)

(18)
由于两个指数函数的差一般不是凸函数,因此优化问题P1仍是非凸函数。此外,每个IoT设备的发射功率之和具有一些递归特性。接下来我们试图利用这些特性来证明每个UAV对应的IoT设备的功率之和是一个凸函数。所有UAVm服务的所有IoT设备的发射功率之和为

(19)
式中:Um为将计算任务卸载至UAVm的IoT设备总数。
此外,有gl1,m[n]≤gl2,m[n]≤…≤glUm,m[n]成立,可以得到每个指数函数的系数都是非负的。令βk,m[n]=1/glk,m[n],有βUm+1,m[n]=0和β0.m[n]=0两种特殊情况,因而式(19)可以重写为
(20)
上式是优化问题P1中自变量的凸函数,因此目标函数仍然一个凸函数。
另外,定义一个ψ(i,n,m)代表在时隙n时设备i在UAVm上的排序,此时数据传输量为
Ri,m[n]=xψ(i,n,m),m[n]-xψ(i,n,m)-1,m[n]。
(21)
因此,优化问题P1可以重写为

(22a)
s.t.C3,C4,C6,

eJx0+JeJx0(x-x0)。
(23)
s.t.C3,C4,C6,C7′,
(24a)
[y(xψ(i,n,m),m[n])-
(24b)
算法1的伪代码如下:
Input:卸载决策α,IoT设备坐标ruser,UAV轨迹ruav
Output:传输功率p,设备的CPU频率fuser,服务器的CPU频率fuav
1 计算每个时隙每个联盟的信道增益并按升序方式排序
2 令x0=0,初始效用函数ρ0=0及迭代次数λ=1
3 直到 |ρλ-ρλ-1|≥εdo
5λ=λ+1,返回步骤3
6 Output:p,fuser,fuav
2.2 卸载策略算法
当初始化卸载策略得到资源分配策略后,卸载策略子问题可以表示为

s.t.C1~C2 。
(25)


(26)
(27)
基于以上定义,我们提出了一种分布式算法来获得博弈的纳什稳定解,称为算法2(联盟形成博弈算法)。通过有限次迭代,可以获得在当前计算资源和功率分配前提下的卸载策略,最终得到稳定的纳什稳定分区如定义3。

算法2的伪代码如下:
2 while num≤10×Udo
3 重复:iter=iter+1,调用算法1,求得p,fuser,fuav


6 else num=num+1
7 end if
8 end while
2.3 理论分析
2.3.1 收敛性分析
问题P0由两层迭代解决:内层(算法1)是在当前卸载策略的前提下通过迭代求解P1″来寻找计算资源和发射功率的最优分配,外层(算法2)通过迭代求解P2求得每一时隙物联网设备的卸载策略,而后内外层迭代求解P0,并寻找到其次优解,即每一时隙每个物联网设备的卸载策略、计算资源和功率分配策略。首先讨论内层的收敛性。根据迭代过程,更新过程可以表示为
(28)
式中:ρ(λ+1)是目标函数的第λ+1次迭代。可以发现,由于问题P1″是严格凸函数,对所有的λ都有ρλ+1<ρλ成立,因此ρλ是λ的单调非增序列,ρλ是该序列的下界。由于具有下界的单调非递增序列总是收敛的,因此本文提出的连续凸逼近算法(算法1)是收敛的。接下来对外层联盟形成博弈的收敛性进行分析。


引理2算法2保证在有限的迭代次数内收敛。
2.3.2 计算复杂度分析

3 仿真结果与数值分析
3.1 仿真设置

3.2 仿真结果及分析

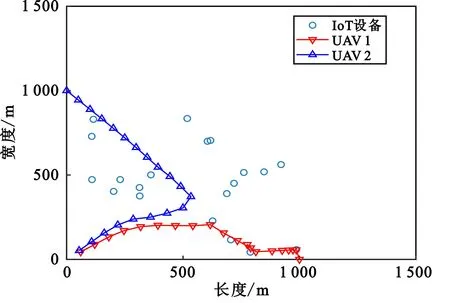
(a)两个无人机的轨迹
图3给出了本文所提算法的收敛曲线,其中M=2。从图3(a)可以看出,当阈值ε=1时,IoT设备数目越多,系统加权能耗越大,而且曲线最终都会趋于一个定值,这验证了该算法的收敛性。而且设备数目越多,进行切换操作可供选择的设备也就越多,从而切换次数也会随之增加,该图也可以验证这一点。图3(b)中U=10,从该图可以看出,纵使算法1中的阈值为不同值,本文所提算法最终也是收敛的。此外,当ε=2时,虽然切换次数最少,但能耗最大;当ε=0.5时,虽然能耗最小,但切换次数最多;当ε=1时,能耗和切换次数都较为适中,因此本文进行其他仿真结果验证时均取ε=1。
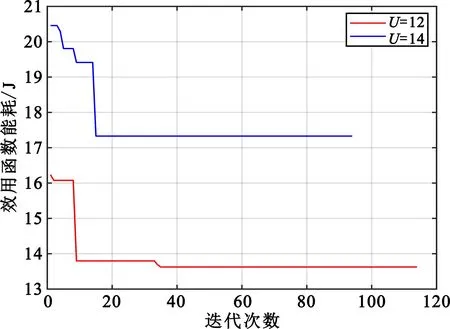
(a)设备数目对收敛性的影响
图4为包含卸载策略和不包含卸载策略在NOMA和OMA两种接入方式下的对比图。在不考虑干扰的情况下,OMA系统中每个设备的带宽减小到NOMA情况下的1/U。因此,最大卸载任务量与发射功率之间的关系如下:
(29)
(30)
与地面的NOMA系统相比,UAV在每一时隙位置不一样,设备倾向于在信道条件较好的时隙卸载较多的计算任务,因此具有更大的灵活性。从图4(a)中可以看出,无论采用哪种接入方式,比起本地计算,设备均倾向于将计算任务卸载至MEC服务器。这是因为MEC服务器的计算能力要比本地计算大得多,可以进一步降低本地计算能耗,相较于OMA接入方式,NOMA接入方式在减少本地计算能耗、卸载能耗和计算能耗方面约为20%。从图4(b)可以看出,本文所提出的包含卸载策略的算法要比文献[8]中固定无人机轨迹时的算法在降低能耗方面更为有效。该文献中的每个设备会将计算任务卸载至全部无人机,而本文中每个联盟中的设备只将计算任务卸载至相应的MEC上,因此会减少一部分的卸载能耗。而且,相比前者而言,后者的设备分配到的计算资源会更多,计算能耗也会更小。此外,比起OMA接入方式,NOMA接入方式在降低能耗方面较为有效。这是因为NOMA系统中有更多的设备重复使用相同的频率,这使得设备占用更大的带宽来传输数据,此时设备可以使用较低的发射功率将其任务卸载至服务器从而降低卸载能耗。
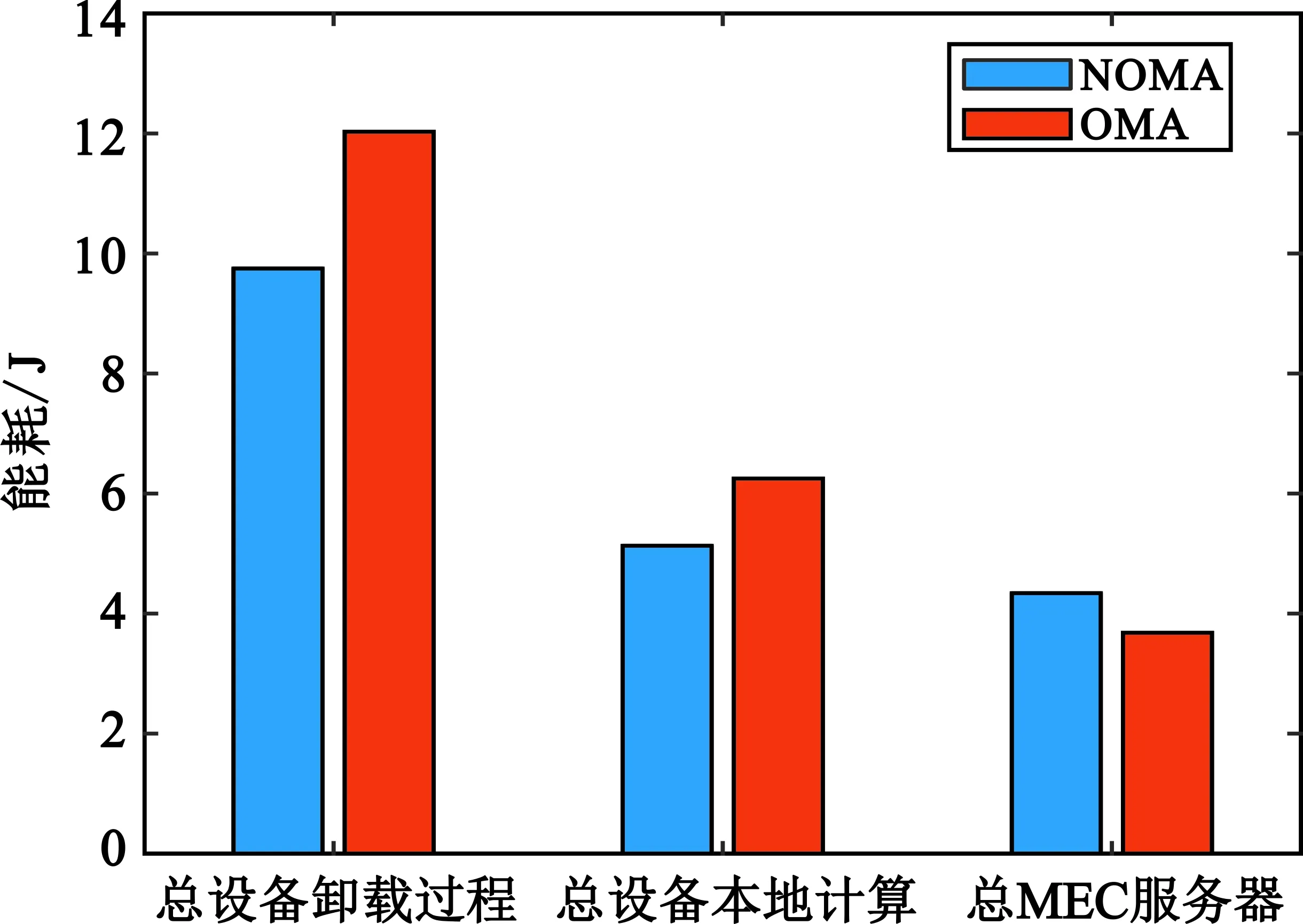
(a)不同接入方式在降低能耗方面的对比图
图5为IoT设备数目U=14,采用不同算法在不同无人机数目的情况下降低IoT设备能耗的对比图。首先,相比于不考虑卸载策略,优化卸载策略能进一步降低设备能耗,这体现了算法的有效性。其次,无人机数目越多,每个无人机服务的设备数目越少,设备分配到的计算能力越强。此外,设备更倾向于将计算任务卸载至离自己更近的MEC服务器,因此设备的能耗会随着无人机数目的增大而减小。最后,当无人机数目越多时,联盟数量也就越多,设备更倾向于进入干扰较小的联盟,虽然可能切换次数增加,但会进一步减小同信道干扰,从而减小设备能耗。
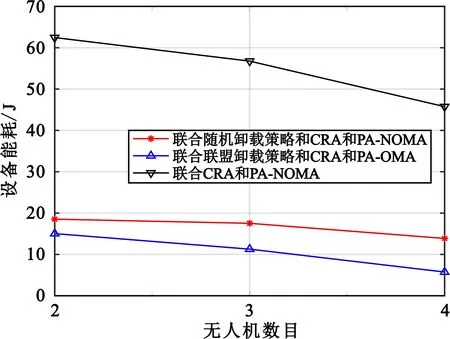
图5 不同算法在无人机数目不一致时降低设备能耗的对比图
4 结束语
为了提升采用NOMA的IoT中MEC系统性能,本文对卸载策略、计算资源分配、功率分配进行联合优化以最小化系统加权总能耗。仿真结果表明,本文提出的方法能够明显降低系统加权总能耗。未来将针对不同种类型的计算任务开展工作。此外,无人机轨迹优化与连续干扰消除排序之间的矛盾也是目前亟待解决的问题。
猜你喜欢
昆钢科技(2022年2期)2022-07-08
当代水产(2021年10期)2022-01-12
科学技术创新(2021年18期)2021-06-23
建材发展导向(2021年23期)2021-03-08
舰船电子对抗(2020年2期)2020-06-23
微型电脑应用(2019年10期)2019-10-23
经济研究导刊(2018年26期)2018-11-14
华人时刊(2018年15期)2018-11-10
计算机测量与控制(2017年12期)2018-01-05
计算机技术与发展(2017年12期)2017-12-20