自动驾驶车队出口道左转交叉口轨迹最优控制
2022-05-27 06:56:44吴健章张范磊刘松泽张高毅陈清蓉
智能计算机与应用 2022年5期
吴健章,张范磊,刘松泽,张高毅,陈清蓉,王 泽,赵 靖
(上海理工大学 管理学院,上海 200093)
0 引 言
交叉口内不同流向的机动车共享着有限的时空资源,资源分配不合理导致交通拥堵。为缓解交通拥堵,主要的应对策略有:优化信号配时、加强管控力度或者改设非常规交叉口等。针对左转车流需求大的交叉口,Zhao等人研究了出口道左转交叉口的设计,对同一车道在不同的时间段内调整其功能,使交叉口的通行效率提高。在多个城市交叉口的落地实施发现,通行能力的提升并没有达到预想的目标,原因在于驾驶员不适应该交叉口的运行方式,导致出口道的利用率不高。
针对自动驾驶的研究,宗芳等人考虑前后车车头间距、加速度差等因素,建立混流跟驰模型。张名芳等人考虑在人机混合驾驶环境下,提出了自动驾驶汽车左转运动规划模型。吴伟等人考虑车辆在交叉口内部的行驶轨迹,在保障车辆在交叉口能安全通过的前提下,提出了自动驾驶交通控制模型。针对车联网环境下对交叉口处的车辆速度进行控制,国内外学者有较多代表性的研究,Zohdy等人将车速作为控制变量,建立了非线性轨迹优化模型。谈超鹏等人利用车辆排队信息,对周期内最大排队长度进行估计。鹿应荣等人结合驾驶的舒适性以及环境的友好性提出了信号交叉口车速的控制策略。多辆自主车辆组合形成车队高效控制,覃频频等人就车辆运行的特点以及道路的几何设计建立三自由度车辆动力学模型。Chen等人基于“1+”的混合排的线性化动力学模型,对临近交叉口的车辆实行控制。当前,对车队的建模主要还是构建线性系统,颜坤等人对车队跟驰的稳定性进行了验证。交叉口内的危险主要体现在相位切换,不同方向的车流冲突在一起,在轨迹数据实时监测情况下,可以预防危险驾驶行为。Luo等人从车辆数据交互的角度提出避免冲突的换道轨迹设计方法。
综上,国内外积累了大量关于自动驾驶汽车以及车辆轨迹方面的研究,鲜有考虑对自动驾驶车队的轨迹进行优化的研究。在车联网的快速发展下,本研究将通过对自动驾驶车队轨迹控制,探究其通过交叉口的最优控制策略。本文主要有以下2点贡献:
(1)建立了出口道左转交叉口车队最优控制模型,进而提出车队的控制策略。
(2)通过数值分析了车辆常规控制与车队控制的行驶策略,并验证模型的可行性及有效性。
1 出口道左转交叉口特征
出口道左转交叉口的几何布局如图1所示,其设计思路为:在出口道区域内设置一个功能区,对一个信号周期内的部分时间,通过预信号的控制,左转车辆可以有选择地从中央分隔带进入综合功能区内等待放行;预信号红灯时,各车道功能与常规状态相同。这一设计与常规车道相比,显然增加了左转车辆的通行空间,车道总数也得到增加,在左转交通量较大的情况时,其具备更高的通行能力。当主信号绿灯放行时,综合功能区内的车辆跟常规左转车道车辆驶出交叉口。出口道左转交叉口的设计,对直行、右转车辆的放行没有影响,其控制方式与常规交叉口相同,与常规交叉口在几何特征上主要有2点不同:
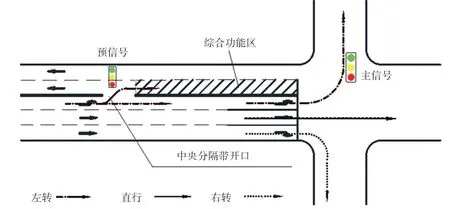
图1 出口道左转交叉口几何布局Fig.1 The geometric layout of the left-turn intersection of the exit road
(1)预信号与主信号配合。在中央分隔带开口设置预信号,通过主、预信号的配合控制整个交叉口。预信号绿灯时,出口道内不允许存在对向驶来车辆;主信号左转放行结束后,出口道内左转车辆需全部清空。预信号配时决定着综合功能区左转效率的提高程度,因此,预信号的绿灯时间是一个重要的调整参数。
(2)综合功能区。出口道内由停车线到中央分隔带开口的一条或多条组成的空间区域被定义为综合功能区。综合功能区的长度以及车道总数是重要的影响参数,对整个交叉口通行效率有较大影响。针对左转流量较大的交叉口时,可以适当地增加车道数或者功能区长度。确保综合功能区内的车辆在规定时间内全部清空,综合功能区长度不宜过长;若综合功能区长度过短,无法提高交叉口所需要的效率。因此,功能区几何参数决定着整个交叉口通行效率。
2 出口道左转交叉口车队最优控制模型
2.1 模型假设
针对智能网联车的特性,提出以下2点假设:
(1)交叉口内车辆均为自动驾驶车辆,控制域内车辆的信息可以被路侧感应器和车载感应器全部采集并实时交互。
(2)车载传感器可以从中央控制器获取系统状态信息,主要包括车辆的加速度、纵向位置以及交叉口的几何参数信息等。
2.2 目标函数
考虑具有固定预测时域的控制周期[,],车队的车辆在预测时域内,通过控制其纵向加速度和换道策略来规划轨迹。考虑车队车辆通过交叉口的效率以及尽可能平稳地通过该交叉口,本文建立车队在出口道左转交叉口的多目标规划模型。该模型的主目标用于提高交叉口内左转车辆的整体通行效率,具体公式如下:

这里,(z-1)≤x()-x≤Mz,研究后可推得:

其中,x()为时刻车辆所在位置;为受控车抵达控制范围的时间(s);为控制周期(s);x为主信号停车线纵向位置(m);为惩罚因子。
次目标使整个车队尽可能平稳地通过交叉口,次目标的数学公式可写为:

其中,a为车辆在时刻的加速度。
2.3 约束条件
(1)控制变量。 受控车辆加速度控制在2个边界范围内,对应的数学公式可写为:

其中,()为受控车在时刻的最高加速度(m/s);为受控车在时刻最高减速度(m/s)。
(2)控制变量l。 本文对车道控制变量的取值为0和2,对应的数学公式可写为:

其中,l()0,表示受控车在时刻不采取换道措施;l()2,表示受控车在时刻采取换道措施。
(3)状态变量。 车辆在交叉口控制范围内不允许倒车,且不高于最高限速。故受控车辆的速度应在零和最大速度范围内,对应的数学公式可写为:

(4)状态变量。 状态变量仅对车道的功能属性进行区别,本文将常规左转车道和综合功能区内车道编号分别定义为-1和1,对应的数学公式可写为:

为避免车辆在综合功能区内发生冲突,左转车辆不能在主信号绿灯结束至下一周期预信号绿灯开始的时间段内进入综合功能区,对应的数学公式可写为:


(5)状态变量。 车辆进入出道口左转交叉口的控制域内,除受主信号红灯影响外,变道的位置也受到限制(如图2所示)。车辆只能在中央分隔带开口处换道进入综合功能区,式(9)、式(10)限制发生变道的起始和结束位置:

图2 中央分隔带开口参数Fig.2 Opening parameters of the central partition
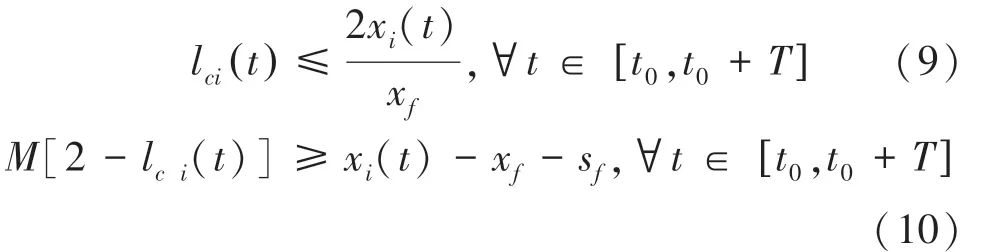
其中,x表示中央分隔带起始位置(m);s为中央分隔带开口宽度(m)。
(6)安全距离。系统内任意2辆车之间均需保持安全距离,对应的数学公式可写为:

其中,l()为控制系统车队车辆在时刻所在车道类型;()表示车辆和车辆之间需要保持的最小安全距离(m);安全距离由受控系统车队车辆在时刻的速度决定,由公式(11)求得:

其中,d表示车身长度(m);d表示必要的安全制动距离(m);h表示安全车头时距(s);()表示后车速度(m/s)。
3 仿真与数值分析
3.1 车队轨迹规划求解方法
本文以构建的多目标公式(1)、(3)作为目标函数,赋予权重、(其中1)转化为单目标规划,公式(4)~(12)作为约束。由于该模型为混合整数非线性规划(MINLP),本文用CasADi求解器在Matlab环境下使用BONMIN算法进行求解。BONMIN是一种基于LP/NLP的分支定界算法,对MINLP问题求解效率较高。
3.2 算法流程
参数输入,包括出口道左转交叉口的几何参数、左转流量、主信号以及预信号配时等信息,转Step2。
更新车辆的位置、速度等信息,增加当前时刻约束。判断是否达到预设最大迭代次数,若满足迭代次数,转Step3;未达到最大迭代次数,继续执行Step2。
构建目标函数表达式,BONMIN算法求解,转Step4。
车队轨迹生成、运行策略输出。
3.3 仿真参数预设
本文选取综合功能区只有一条车道的出口道左转交叉口,由8辆左转车组成的车队,按其初始位置与停车线的距离依次编号为1,2,…,8。8辆车在控制域内位于常规左转车道,现对出口道左转交叉口的几何信息以及主要的参数进行设定见表1。
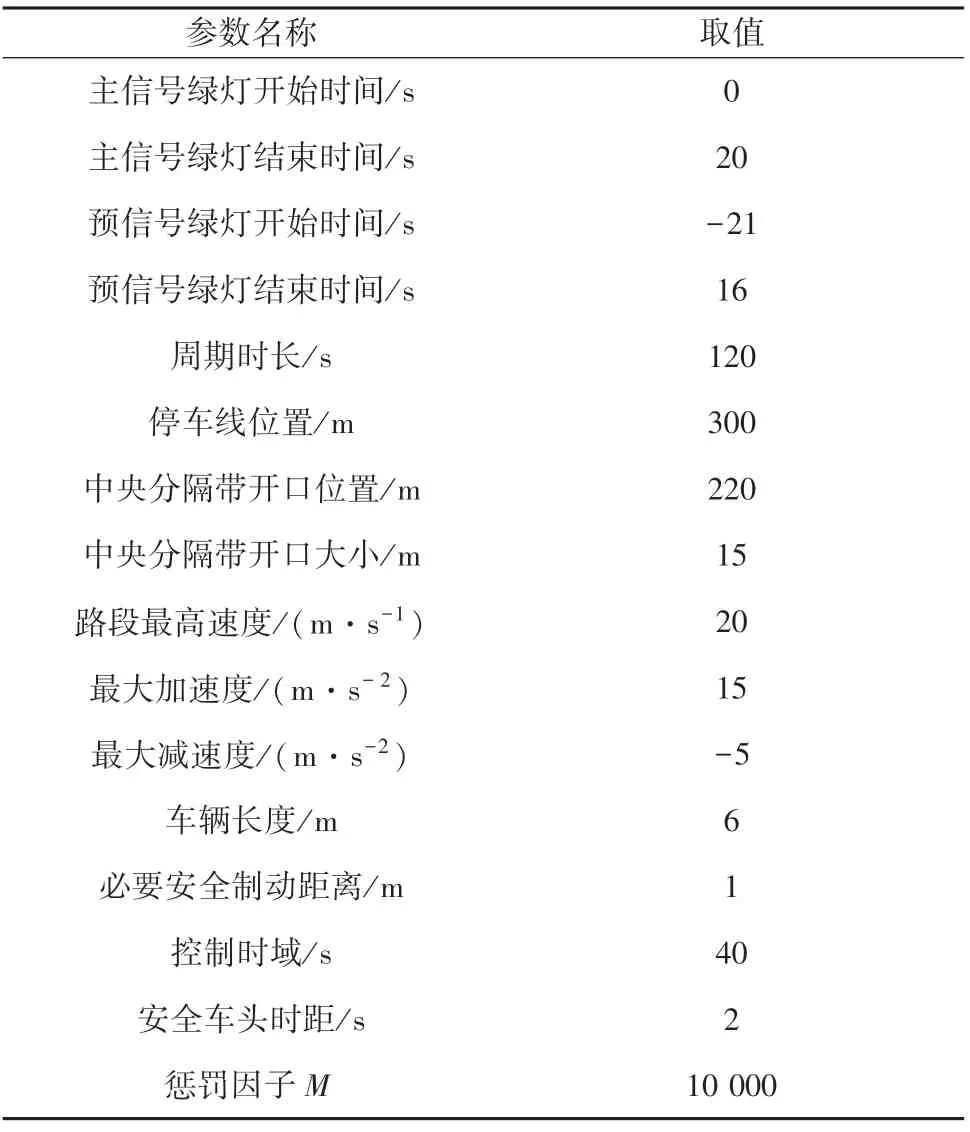
表1 参数设定Tab.1 Parameters setting
3.4 案例分析
本文所探究的车队轨迹控制方法,对整个车队的加速度和换道变量进行控制,车队车辆受控前轨迹图如图3所示,车队车辆受控后轨迹如图4所示。从图4可以看出,在该案例中,控制域内的车队车辆采取的策略有以下3种:不换道-不停车、不换道-停车、换道-停车。对此拟做研究分述如下。
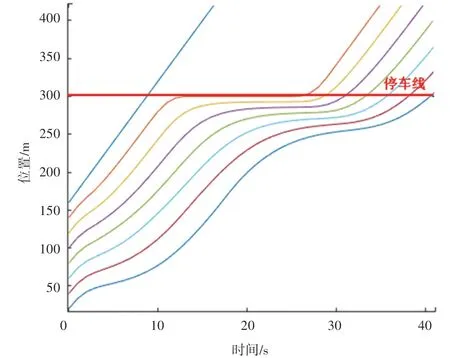
图3 车队车辆受控前轨迹Fig.3 The trajectory diagram of the convoy vehicles before being controlled
(1)策略1:不换道-不停车。由图4实线轨迹分析可知,车辆1、8最终采取的策略为不换道-不停车。车辆1在常规左转车道行驶,由于其前面没有车辆,且当前时段为主信号、即绿灯,车辆1保持原有速度通过交叉口;车辆8跟随车辆7在常规车道行驶,当车辆8将要到达停车线时,主信号已经绿灯,车辆1、2、6、7依次通过交叉口,车辆8不需要排队减速,可直接驶离交叉口。
(2)策略2:不换道-停车。由图4虚线轨迹分析可知,根据对车队整体的规划,车辆2、6、7最终采取不换道在常规左转车道停车线停车等待放行的策略。在车辆1已通过交叉口的情况下,车辆2到达停车线,此时为红灯,停车等待放行;车辆6、7由于整体规划的原因,车辆3、4、5优先进入到综合功能区内,此时与常规左转车道相比,综合功能区的排队长度更长,所以车辆6、7在常规车道行驶排队于车辆1后面,等待主信号放行。
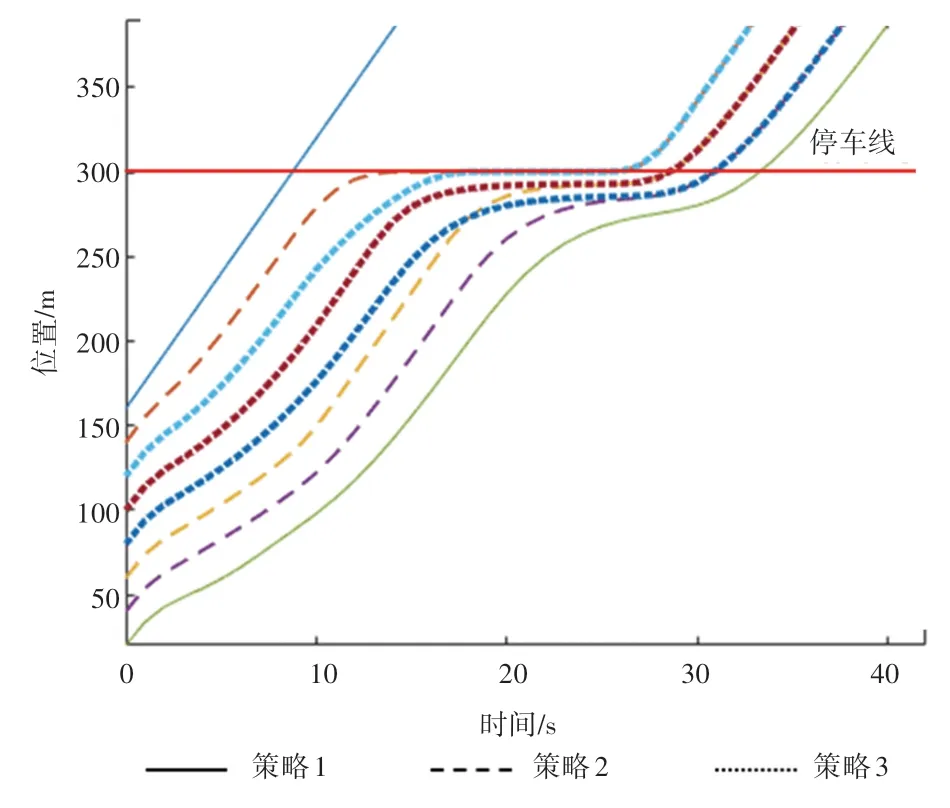
图4 车队车辆受控后轨迹Fig.4 Trajectory diagram of the convoy vehicles after being controlled
(3)策略3:换道-停车。由图4点轨迹分析可知,车辆3、4、5最终选择在中央分隔带开口处进入综合功能区内排队等待放行。考虑对车队整体的规划,使得该车队能够最优地通过交叉口。车辆3、4、5经过分隔带开口时,预信号为绿灯,将优先进入综合功能区等待放行。通过实行该策略,车辆6、7的放行序位也得到了提升,进而提高了整个车队在该交叉口通过的效率。
利用Matlab执行程序得出通行能力数据,通行效率提升情况见表2,本文所提出的出口道左转放行策略相对于常规交叉口放行策略在通行能力上提高了11.6%,对交叉口的通行效率有较大提升。
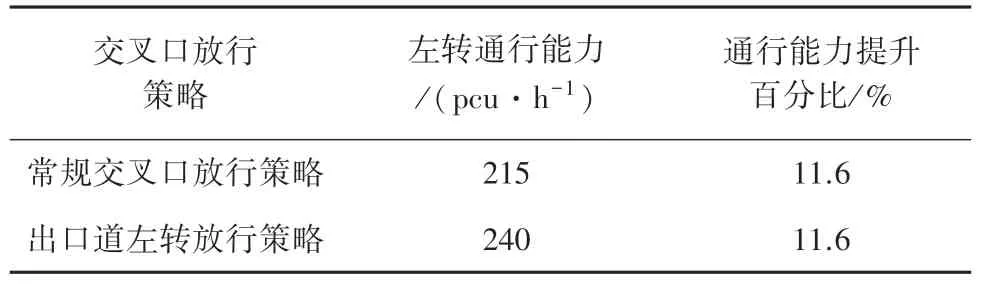
表2 通行能力对比Tab.2 Comparison of traffic capacity
综上,该数值仿真案例中整个车队决策合理,与车队车辆受控前相比,部分车辆的放行顺序提前,全局的控制策略对本案例的通行效率有明显的提高。因此,本文所提出的自动驾驶环境下,出口道左转交叉口车队的轨迹控制模型合理,对整个交叉口的通行效率有一定程度提高。
4 结束语
本文建立的自动驾驶车队轨迹控制模型,对整个车队的车辆在出口道左转交叉口的行驶轨迹策略做了优先规划,全部车辆按照已规划的轨迹运行。通过仿真对模型进行验证,得出以下结论:
(1)车队的车辆按照模型规划好的轨迹行驶,不仅能合理利用对向出口车道,对功能区的利用率以及交叉口的通行效率也有一定程度的提升。
(2)案例中车队车辆的运行策略主要包括3种:不换道-不停车、不换道-停车、换道-停车。研究中建立的模型能够根据车队到达状态制定相应的通过策略,模型具有较高的适用性以及广泛的应用场景。
猜你喜欢
太原科技大学学报(2022年6期)2022-12-26 12:53:08
警察技术(2022年3期)2022-06-22 06:06:24
小天使·四年级语数英综合(2021年3期)2021-05-10 02:46:28
中国人民公安大学学报(自然科学版)(2019年3期)2019-10-23 04:00:40
山东冶金(2019年3期)2019-07-10 00:53:54
现代园艺(2017年23期)2018-01-18 06:57:44
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:32
中国房地产业(2016年2期)2016-03-01 01:25:37
水科学与工程技术(2016年6期)2016-02-27 13:29:22
系统工程学报(2015年3期)2015-02-28 19:54:01