
自动驾驶汽车交通肇事之刑事责任的归属路径
2022-05-24 07:13季金升韩文蕾
哈尔滨师范大学社会科学学报 2022年2期
季金升,韩文蕾
(1.中国政法大学 中欧法学院,北京 100088;2. 西北工业大学 公共政策与管理学院,陕西 西安 710129)
2021年8月20日,市场监管总局(标准委)发布GB/T 40429-2021《汽车驾驶自动化分级》推荐性国家标准(以下简称《分级》),将于2022年3月1日起实施。该标准对汽车驾驶自动化功能的分级问题作了规定,具体包括相关术语和定义、分级原则、技术要求等。这是我国汽车驾驶自动化发展过程中的里程碑事件,标志着我国即将拥有由官方制定的汽车驾驶自动化分级标准。明确的分级标准将有助于相关企业更有针对性地开展研发工作,也将推动各类自动驾驶汽车的量产进程。
作为人工智能在交通领域的最新应用,自动驾驶汽车具有极大的社会价值,能够“大幅降低交通事故的发生、缓解交通拥堵、增强人们的移动性、提升时间利用效率”[1](P17-18)。尽管驾驶自动化技术日趋成熟,但其广泛应用所带来的法律问题同样不容忽视。自动驾驶汽车交通肇事后,各相关主体的刑事责任应当如何划分与承担?对此,学界存在是否需要修改现行刑法以解决该问题的争论(1)有学者建议刑法增设非法利用人工智能罪、人工智能监督过失罪、无人驾驶汽车交通事故罪等新罪名,构建科学的应对自动驾驶汽车等人工智能犯罪的刑法体系。参见陈结淼,王康辉:《论无人驾驶汽车交通肇事的刑法规制》,载《安徽大学学报(哲学社会科学版)》2019年第3期。也有学者主张在既有的刑事法律规范内解决自动驾驶汽车肇事的刑事责任归属问题。参见牛天宝:《通过现有规范解决自动驾驶汽车肇事之刑事责任归属问题》,载《法学杂志》2020年第3期。。本文认为,自动驾驶汽车肇事刑事责任的归属问题并未突破现有的刑事法律规范与理论。本文拟基于中国版驾驶自动化分级标准,对这一论断进行分析,并力求在现行刑事法律规范内寻找针对该问题的解决方案。
一、问题的背景:驾驶自动化与功能等级
近年来,随着技术研发的不断深入,自动驾驶汽车在各方面取得突破性进展。但是,对于何谓驾驶自动化,并没有统一的定义。自市场监管总局(标准委)发布《分级》开始,驾驶自动化的定义及其相关术语终于由官方确定下来。所谓驾驶自动化(driving automation),即“车辆以自动的方式持续地执行部分或全部动态驾驶任务的行为”。
关于自动驾驶汽车的技术等级,目前国内外存在一些不同的标准,其中国际上所普遍采用的分级标准由国际汽车工程师学会(SAE)制定(2)国际汽车工程师学会(SAE)将自动驾驶技术分为六级,分别是L0无自动化(No Automation)、L1驾驶辅助(Driver Assistance)、L2部分自动化(Partial Automation)、L3有条件的自动驾驶(Conditional Automation)、L4高度自动化(High Automation)、L5完全自动化(Full Automation)。。《分级》的发布,意味着中国终于有了自己的自动驾驶分级标准。基于驾驶自动化分级原则(3)驾驶自动化的分级原则具体包括:(1)驾驶自动化系统能够执行动态驾驶任务的程度;(2)驾驶自动化系统在执行动态驾驶任务中的角色分配;(3)驾驶自动化系统是否存在设计运行范围限制。,《分级》将驾驶自动化划分为6个等级:应急辅助(0级)(4)0级驾驶自动化不是无驾驶自动化,而是可感知环境,并提供提示信息或短暂介入车辆控制以辅助驾驶员避险(如车道偏离预警、前向碰撞预警、自动紧急制动、车道偏离抑制等紧急情况下提供的辅助功能)。但是还不具备目标和事件探测与响应能力的功能(如定速巡航、电子稳定性控制等),不在驾驶自动化功能的范围内。、部分驾驶辅助(1级)(5)对于1级驾驶自动化,驾驶员和驾驶自动化系统共同执行全部动态驾驶任务,并监管驾驶自动化系统的行为和执行适当的响应或操作(如车道居中控制、自适应巡航控制等功能)。、组合驾驶辅助(2级)(6)2级驾驶自动化和1级驾驶自动化都是驾驶辅助,不同点在于1级无法同时持续执行车辆横向或纵向运动控制。因此,将1级驾驶自动化命名为“部分驾驶辅助”,将2级驾驶自动化命名为“组合驾驶辅助”。、有条件自动驾驶(3级)、高度自动驾驶(4级)、完全自动驾驶(5级),见表1。

表1 驾驶自动化等级与划分要素的关系
根据中国版驾驶自动化分级标准,虽然从0~5级的整个阶段都可以称为驾驶自动化,但是,0~2级驾驶自动化依然是由驾驶员主导的自动化,驾驶自动化系统只是起辅助作用。3级驾驶自动化是一个具有特殊意义的过渡性阶段。进入这一阶段后,驾驶自动化系统在其设计运行条件内可以持续地执行全部动态驾驶任务(dynamic driving task),但是在系统发出介入请求和发生明显的动态驾驶任务相关的车辆故障时,动态驾驶任务后援用户必须及时执行动态驾驶任务成为驾驶员。4级、5级驾驶自动化才是以汽车自主行驶为主的真正意义上的自动化。在这两个等级下,系统可以在其设计运行条件内甚至任何可行驶条件下(商业和法规因素等限制除外)持续地执行全部动态驾驶任务并自动执行最小风险策略(minimal risk maneuver)。换言之,在系统发出介入请求时,即使用户不作响应,系统都能够自动使车辆事故风险达到可接受的状态。
在起草过程中,中国版驾驶自动化分级标准充分考虑到了国内外现有相关标准的统一和协调,因而与国际汽车工程师学会(SAE)的分级标准基本一致,但也有少部分根据我国国情进行了调整。比如,《分级》将0级驾驶自动化称之为“应急辅助”,而非 SAE 版的“无驾驶自动化”;在3级明确增加了对驾驶员接管能力监测和风险减缓策略的要求,以减少实际操作中的安全风险[2](P4)。另外,中国版驾驶自动化分级标准的规定更加详细,不仅规定了驾驶自动化的术语和定义、分级原则,还规定了各等级的技术要求等,因此适用性更强,也更加符合中国产业发展现状。本文将立足于中国版驾驶自动化分级标准展开探讨。
二、自动驾驶汽车刑事责任主体地位问题
(一)学界对自动驾驶汽车作为刑事责任主体的争议
当自动驾驶汽车交通肇事时,刑法是否应追究自动驾驶汽车这个人工智能体的刑事责任?对该问题的回答决定了在探讨自动驾驶汽车交通肇事的刑事责任承担时,是否应当将自动驾驶汽车纳入到讨论中来。目前学界对该问题的争论甚为激烈,归纳起来主要有肯定说与否定说两种截然对立的观点。
肯定说认为,自动驾驶汽车应当具有刑事责任主体地位。有学者从人格责任出发,主张自动驾驶汽车在其专业领域范围内可以产生思维能力,从而能够辨认和控制自己的行为,也有一定的自我意识和刑罚感知能力,因而可以通过“永久销毁”这一刑罚类型来使自动驾驶汽车承担刑事责任[3](P82-84)。还有学者主张类比单位拟制人工智能具有刑事主体地位,“将现阶段刑法中刑事责任主体增加为自然人、单位和人工智能体”[4](P111)。
否定说与上述观点相反。有学者认为,当前的弱人工智能产品还没有自我意识或者自我反思的能力,无法区分不法和罪责,更不能承担针对人类设定的刑罚,因此其实施的纯粹物理行为不能被视为与人类行为具有同等意义,不能让自动驾驶汽车自行承担刑事责任[5](P185)。还有学者认为,犯罪的行为主体只能是自然人和单位,而自动驾驶汽车既非人类亦非单位;由于自动驾驶汽车缺乏人类的意志,因此通过制裁自动驾驶汽车无法起到防止其再次范围的效果,有违刑罚的特殊预防功能[6](P132)。因此,自动驾驶汽车不能成为承担刑事责任的主体。
(二)自动驾驶汽车刑事责任主体地位之否定
根据我国刑法有关规定和理论,犯罪主体是指实施危害社会的行为并依法应负刑事责任的自然人和单位。由此可知,在我国刑法中,犯罪主体只能是自然人和单位。刑法的自身属性决定了自动驾驶汽车无法具有刑事责任主体地位。
1. 刑事责任能力的欠缺
“刑事责任能力是犯罪主体的核心和关键要件”[7](P84),可以分为行为辨认能力与控制能力。在当前弱人工智能背景下,自动驾驶汽车不可能具有自主意识,罔论具有辨认和控制自己行为的能力。那么,对于强人工智能而言,该问题的讨论是否会有不同的答案?有学者认为,强人工智能产品具有独立的辨认能力和控制能力,它能够“在自主意识和意志的支配下独立作出决策并实施行为”[8](P92)。姑且不论未来人类是否有能力制造出来具有强人工智能的自动驾驶汽车,即使能够制造出来,恐怕也没有人敢于将自己的生命安全交给一台能够脱离程序,具有自主意识的汽车。实际上,与仿生机器人等强人工智能产品不同,自动驾驶汽车毕竟只是一种交通运输工具,虽然其可能具有一定的自主学习能力,但“其有限的自主学习不过是程序与算法的预先设定,并不是意志自由的体现”[9](P104)。而且这种能力还被限制在交通运输功能范围内,比如辨认各种路况、交通标志以及控制各种驾驶行为,却不可能具有完全责任能力,驾驶员与自动驾驶汽车充其量也只是人和工具的关系,后者自然不能成为承担刑事责任的主体。
2. 刑罚功能难以实现
刑罚功能是指国家制定、适用、执行刑罚所直接产生的社会效应,包括威慑功能、安抚补偿功能和教育感化功能等[10](P518)。在我国现行刑罚体系下,任何一种刑罚制度对于自动驾驶汽车而言都是毫无意义的。人工智能既无生命也无独立财产,更没有类似于人类对于行动自由或财富积累的权利需求,因此现行刑罚不能对其进行有效的处罚[11](P73)。有学者甚至进一步提出针对强人工智能产品的刑罚体系初步设计构想,具体包括删除数据、修改程序、永久销毁三类刑罚[12](P142)。但是,删除数据和修改程序本质上只是一种修理方式,却无法被视为一种刑罚措施;另外,驾驶员与自动驾驶汽车只是人和工具的关系,因此永久销毁与其说是在处罚自动驾驶汽车,不如说是在处罚人,实际上损害的是自动驾驶汽车用户的利益,何况自动驾驶汽车并不具备对刑罚之痛苦的感知能力。因此,对于自动驾驶汽车这种人工智能进行惩处无法实现刑罚的功能。
3. 类比单位犯罪之做法的否定
追究单位刑事责任的理论根据在于法人实在说,与个人一样,法人也属于现实的社会实体,法人机构及其代表人以法人名义实施的行为应视同法人的直接行为,因此法人具有权利能力和行为能力,可以成为犯罪主体[13](P98)。单位犯罪是为了单位谋取利益,由单位的决策机构决定,由直接责任人员实施的,换言之,其本质上依然是由自然人进行决策并执行的行为。我国刑法对单位犯罪的处罚以双罚制为原则,以单罚制为例外。但是,自动驾驶汽车只是一种工具,其活动受控于人,不需要对其本身适用刑罚;另外,对自动驾驶汽车单独处刑不仅存在前述刑罚的痛苦本质缺位问题,还可能使得研发者和提供者推卸社会责任,不利于未来人工智能系统的发展[14](P157-158)。因此,不应将自动驾驶汽车认定为刑事责任主体。
4. “未雨绸缪”理念过于超前
持肯定说的学者大都秉持着一种“未雨绸缪”的研究理念,积极探讨未来世界的强人工智能乃至超强人工智能给法律带来的挑战,进而提出应对之道,以求做到有备无患。但是,既有成果往往过于“关注人工智能‘未来刑法学’甚至是‘科幻刑法学’,桎梏于人工智能的主体化与否,无法有效地为人工智能犯罪的刑法评价与预防提供理论支撑”[15](P40)。经过近几年的实际探索,车企逐渐明晰高等级自动驾驶技术的量产难度,变得更加务实:当前,国内主流车企大多已经推出2级自动驾驶量产车型(7)实际上,现阶段市场上销售的自动驾驶汽车所搭载的包括车道偏离预警、前碰撞预警、自动紧急制动、车辆识别、车道线识别等功能即为2级及以下驾驶自动化,尚未达到中国版驾驶自动化分级标准对于3级及以上驾驶自动化等级的技术要求。,鉴于4级自动驾驶技术所存在的安全、成本、技术、路权等难点,未来几年车企将会重点研发3级自动驾驶技术[16](P61)。可以发现,3级驾驶自动化(有条件自动驾驶)与4级驾驶自动化(高度自动驾驶)之间尚且存在一条“难以逾越的鸿沟”,更不必说更高级的强人工智能产品了,因此上述“未雨绸缪”的理念显得过于超前,反而给人一种“杞人忧天”之感,实不可取。
综上,自动驾驶汽车不能成为承担刑事责任的主体,当自动驾驶汽车交通肇事时,刑法不能追究自动驾驶汽车这个人工智能体的刑事责任,而应在现行刑事法律规范内,寻求追究其他主体的刑事责任。
三、自动驾驶汽车交通肇事的刑事责任承担
(一)自动驾驶汽车用户刑事责任的类型化分析(8)这里仅讨论自动驾驶事故中用户构成过失犯罪的问题,不讨论用户故意利用自动驾驶汽车构成故意犯罪的情况。
在汽车驾驶自动化的语境下,用户(user)是指与驾驶自动化相关的人类角色的统称。在驾驶自动化系统激活后,用户在不同等级的驾驶自动化系统中担任的角色不同。具体来说,0~3级驾驶自动化中用户由传统/远程驾驶员转变为动态驾驶任务后援用户,直至4级、5级完全转变为乘客或调度员(9)调度员(dispatcher),是指在车辆无驾驶员操作的条件下,通过激活驾驶自动化系统以实现车辆调度服务但不执行动态驾驶任务的用户。的角色,见表2。本文以此为根据,把驾驶自动化的功能等级划分为辅助驾驶场景、有条件自动驾驶场景、自主驾驶场景三种类型,作为探讨用户刑事责任的基础。
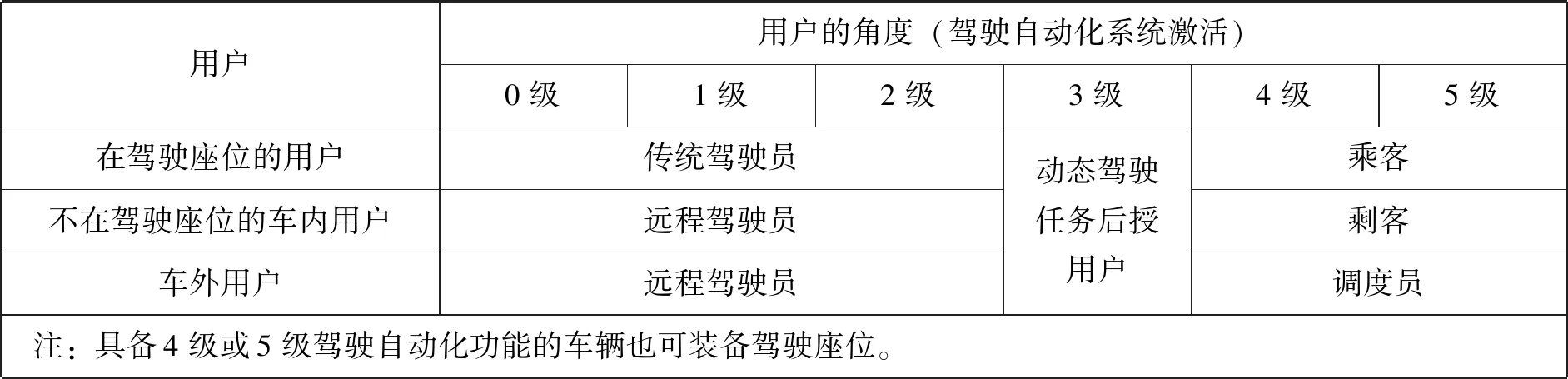
表2 驾驶自动化系统激活后用户的角色
1. 辅助驾驶场景下用户的刑事责任
辅助驾驶场景,包括0级驾驶自动化(应急辅助)、1级驾驶自动化(部分驾驶辅助)、2级驾驶自动化(组合驾驶辅助)。这是指在驾驶过程中,用户拥有对汽车驾驶的主导权,驾驶自动化系统仅为驾驶辅助。该场景下,用户担任传统驾驶员或远程驾驶员的角色,需要执行全部或者系统没有执行的其余动态驾驶任务,包括驾驶决策、车辆照明及信号装置控制等。此外,用户必须监管驾驶自动化系统,并在需要时介入以确保车辆安全,此时系统应当立即解除控制权。
由于0~2级驾驶自动化并非真正意义上的自动驾驶,因此在此场景下构成交通肇事罪与传统的交通肇事罪并无区别,即在发生交通肇事之后,应当认定用户是否履行了安全驾驶的注意义务,能否构成交通肇事罪。如果事后查明事故的发生是由驾驶自动化系统发生故障引起的,那么就不能追究用户的刑事责任,而应具体讨论生产者和销售者的责任问题。
2. 有条件自动驾驶场景下用户的刑事责任
有条件自动驾驶场景,即3级驾驶自动化(有条件自动驾驶)。该场景下,在驾驶自动化系统激活前,用户的角色仍然是驾驶员,有权决定何时开启驾驶自动化系统,并且在驾驶自动化系统激活后成为动态驾驶任务后援用户。当收到介入请求时或者发生车辆其他系统失效时,动态驾驶任务后援用户应当及时执行动态驾驶任务接管。该场景又称为“人机混驾”,即用户与驾驶自动化系统共同驾驶车辆,因此其情形相对较复杂,需要分情况讨论。
首先,在驾驶员激活驾驶自动化系统之前,需要驾驶员手动驾驶汽车,因此其承担的注意义务与上述驾驶辅助场景下的驾驶员没有差别。如果驾驶员的行为符合我国《刑法》第133条关于交通肇事罪的规定,就能够以该罪追究其刑事责任。
其次,在驾驶员激活驾驶自动化系统后,驾驶自动化系统开启。虽然此时系统在设计运行条件内能够执行全部动态驾驶任务,但是用户的角色转变为动态驾驶任务后援用户,仍然需要保持一定的警觉性。在系统发出介入请求或出现车辆其他系统失效时,其必须及时执行动态驾驶任务接管,使车辆事故风险达到可接受的状态。因此,这种情形下用户仍然应当承担一定的注意义务。有学者将此时用户的注意义务归纳为三个方面:一是对自动驾驶汽车的自动驾驶功能进行正确操作与使用的义务;二是对自动驾驶汽车的接管义务;三是对自动驾驶汽车的警觉义务[17]。如果用户因违反上述注意义务而引发重大交通事故的,应当承担刑事责任。
自动驾驶汽车未发出介入请求而发生重大交通事故时,用户是否应当承担刑事责任?有学者认为,在HA(高度自动驾驶)等级(10)该学者在文章中讨论相关问题时,采用的是我国国家制造强国建设战略咨询委员会制定的自动驾驶汽车等级划分标准,分为DA、PA、HA、FA四个等级,因此这里的HA(高度自动驾驶)等级实际上对应的是3级驾驶自动化(有条件自动驾驶)。的自动驾驶汽车发出警报之前,驾驶人并不需要关注汽车的驾驶安全问题,因此也就没有安全注意义务和结果回避义务,如果发生了交通事故,不能追究驾驶人的刑事责任[18](P126)。本文不赞同这种观点。根据《分级》,在有条件自动驾驶场景下,驾驶自动化系统激活后,虽然动态驾驶任务后援用户可将视线转移至非驾驶相关的活动,但仍需保持一定的警觉性。对明显的外部刺激(如:救护车警笛等)进行适当的响应,决定是否以及如何实现最小风险状态,并判断是否达到最小风险状态。换言之,在驾驶自动化系统发出介入请求之前,用户需要关注汽车的驾驶安全。即使系统未发出介入请求,用户也应当履行自己的安全驾驶注意义务,否则就要承担相应的责任。
当然,这并非是对用户规定严格责任,否则驾驶自动化就失去了存在的意义。这里要求的是,在驾驶自动化系统未发出介入请求的情况下,如果用户已经预见到系统失效却未及时执行动态驾驶任务接管,以致引发重大交通事故,就可以构成过失犯罪。值得注意的是,这里的用户在本身存在重大过失时才能够承担过失责任。因为在有条件自动驾驶场景下,应当允许用户对驾驶自动化系统保留合理信赖,在驾驶时保持“一定”警惕而非“高度”警惕,因此这里可以排除成立疏忽大意的过失,而考虑是否成立过于自信的过失。至于系统未发出介入请求而发生交通事故,自动驾驶汽车的生产商(包括研发者和生产者)是否应当承担刑事责任,将在下文进行讨论。
值得注意的是,驾驶自动化系统在发出介入请求后,需要继续执行动态驾驶任务一定的时间供动态驾驶任务后援用户接管。如果系统发出介入请求的时间与发生交通事故的时间间隔过短,即使用户能够及时执行动态驾驶任务接管,也无法避免交通事故的发生,那么此时用户因不具有结果回避可能性从而缺乏注意义务,也就不能追究其刑事责任。关于自动驾驶汽车的生产商的责任承担问题,将在下文中一并分析。
3. 自主驾驶场景下用户的刑事责任
自主驾驶场景,包括4级驾驶自动化(高度自动驾驶)、5级驾驶自动化(完全自动驾驶)。该场景下,在驾驶自动化系统激活前,用户的角色是驾驶员或调度员,有权决定是否开启驾驶自动化系统,并且在驾驶自动化系统激活后成为乘客或调度员。这时用户无须执行动态驾驶任务或接管,也无须决定是否及如何实现最小风险状态,且不需要判断是否达到最小风险状态。在系统发出介入请求时,即使乘客没有响应,系统也可以自动执行风险减缓策略并最终使车辆事故风险达到可接受的状态。
在驾驶自动化系统激活前,自主驾驶场景下用户的刑事责任承担与上述两种场景下的驾驶员并无区别,在此不再赘述。在驾驶自动化系统激活后,用户就不再承担任何动态驾驶任务和动态驾驶任务接管,其注意义务已被转移给驾驶自动化系统,自然不需要承担相关刑事责任。不过,这并不意味着完全排除用户承担过失犯罪刑事责任的可能性,用户仍然担负着正确使用驾驶自动化功能的注意义务。比如,在驾驶自动化系统激活前,用户必须确认装备驾驶自动化系统的车辆状态是否可以使用。如果用户未经确认即开启驾驶自动化系统,导致系统错误介入扰乱车辆正常行驶而发生重大交通事故,则应当承担刑事责任。
(二)自动驾驶汽车生产商的刑事责任
目前为止,人工智能还只是一个辅助工具,“自动驾驶的侵权问题,归根结底还是可以在自动驾驶方案的提供者、汽车厂商或者使用者之间进行归责而解决”[19](P44)。如上所述,自动驾驶汽车不能成为承担刑事责任的主体,上文也已经讨论了用户(使用者)的刑事责任问题。自动驾驶汽车交通肇事后,如何追究“背后主体”的刑事责任,成为学界讨论的热点问题。
1. 自动驾驶汽车进入流通领域前存在产品缺陷的情况
自动驾驶汽车因本身存在产品缺陷引发交通事故后,对于能否追究生产商的刑事责任,学界存在一定的争论。肯定论者认为,生产商具有风险控制义务,在自动驾驶汽车尚未进入流通领域时应当进行全面完善的实质检查,如因过失未履行该义务而导致发生交通事故的,生产商应当承担交通肇事罪的刑事责任[20](P76)。否定论者认为,由于自动驾驶汽车的设计者、生产者和销售者“对具体的驾驶违章行为所致具体肇事结果不可能预见和避免,无法对具体肇事结果产生注意义务,因而不能构成交通肇事罪”[21](P36)。
本文赞成否定说。“过失犯的注意义务并非一般的、抽象的注意义务”[5](P186),而是对某一具体行为所导致的具体结果的注意义务。在研发和生产过程中,生产商无法预见到自动驾驶汽车进入流通领域后可能发生的所有意外情况,也就无法在研发生产过程中编写毫无漏洞的程序运行规则。在驾驶过程中,只有用户可能对某一具体的肇事行为及肇事结果具有预见和避免的可能性,而生产商不具有这种可能性,也就无法认定其存在预见和避免义务。因此,在进入流通领域前,如果生产商生产的自动驾驶汽车符合国家标准、行业标准,即使发生了上述无法预见的意外情况,也无法认定生产商违反注意义务,更不能追究其过失责任。但是,如果生产商故意生产不符合保障人身、财产安全的国家标准、行业标准的自动驾驶汽车,造成严重后果的,应当以生产不符合安全标准的产品罪追究其刑事责任。
自动驾驶汽车的生产商都是拥有人工智能技术的大型车企,从经济效益和未来发展等各方面考虑,基本上都不可能故意生产不符合安全标准的自动驾驶汽车,因此自动驾驶汽车本身的产品缺陷几乎只能存在于生产商因过失而生产的不合格产品之上,但是对该种过失行为,现行刑法并无对应的罪名进行规制,此时被害人的权益就无法得到保障。本文认为,可以考虑对自动驾驶汽车的生产商规定严格责任,使得生产商在研发生产过程中严格遵守操作规范,生产符合安全标准的自动驾驶汽车,防止生产商辩称自己存在过失而逃脱罪责,以维护被害人权益。当然,严格责任并非绝对责任,如果生产商能够证明其研发生产的自动驾驶汽车符合相关的安全标准(如GB/T 40429-2021《汽车驾驶自动化分级》推荐性国家标准),即使发生了难以预见的损害后果,也可以免除生产商的刑事责任。
2. 自动驾驶汽车投入流通后发现产品缺陷的情况
在自动驾驶汽车投入流通后,生产商应当持续关注汽车运行情况。一旦发现汽车存在缺陷的,应当及时采取警示、召回等补救措施。进行这种监督和管理,是生产商的义务,这种义务来源于监督过失理论。
监督过失理论源自20世纪60年代的日本,是指“某人因过失直接造成法益侵害结果后,对负有应对该人予以监督之义务的人追究过失责任”[22](P42-42)。有学者认为,生产商对使用者应当如何使用汽车不存在过失犯罪的监督、管理义务,正如工业机器的生产商也不可能对购买者安全地使用机器具有监督、管理义务一样[21](P42-43)。本文不赞同这种观点,因为自动驾驶汽车这种人工智能产品不同于工业机器。如上所述,在交通运输功能范围内,自动驾驶汽车可能具有一定的自主学习能力,它能够自动更新升级。因此,在自动驾驶汽车投入流通后,一旦发现汽车存在缺陷的,生产商有义务进行警示和召回。如果生产商未尽到上述义务以致造成重大交通事故的,应当对损害结果承担过失责任。
四、结语
未来已来,世界正处于方兴未艾的人工智能时代,自动驾驶汽车的出现和发展给人们的生活带来便利的同时,也伴随着一系列风险。就自动驾驶汽车交通肇事而言,赋予车辆刑事责任主体地位,与刑法自身属性不符,而且过于超前,尚不具有现实意义。我们不能盲目开展“泛人工智能化研究”[23](P121),而应当立足于基本刑法理论,寻求在实体法体系内追究自动驾驶交通肇事相关主体的刑事责任。对于自动驾驶汽车的用户而言,主要根据其在不同场景下是否尽到相应的注意义务来判断其刑事责任。至于自动驾驶汽车的生产商,除非故意生产不符合安全标准的自动驾驶汽车可能构成生产不符合安全标准的产品罪外,由于自动驾驶汽车本身存在产品缺陷而引发交通事故的,不应以交通肇事罪定罪处罚。但应对生产商适用严格责任,以增强其社会责任感,维护被害人权益。另外,根据监督过失理论,在自动驾驶汽车投入流通后,生产商仍然需要承担一定的监督和管理义务,若因未尽到上述义务以致引发重大交通事故,则应刺破驾驶自动化系统面纱,追究生产商的刑事责任。
猜你喜欢
华人时刊(2022年5期)2022-06-05
海峡姐妹(2020年12期)2021-01-18
人大建设(2018年4期)2018-06-26
时代英语·高二(2017年4期)2017-08-11
投资者报(2017年9期)2017-03-14
时代金融(2016年3期)2016-09-10
世界热带农业信息(2016年3期)2016-04-05
连环画报(2015年12期)2016-01-14
中学生英语·阅读与写作(2014年11期)2015-03-11
中学生英语·阅读与写作(2014年3期)2014-07-29
