
自动化毫米波信道测量与建模技术
2022-05-23 07:25段开源刘成国张博涵胡文韬熊得安周鸿锟
计算机工程与设计 2022年5期
段开源,刘成国+,张博涵,胡文韬,熊得安,周鸿锟
(1.武汉理工大学 理学院,湖北 武汉 430070;2.武汉理工大学 湖北省射频微波应用工程技术 研究中心,湖北 武汉 430070;3.武汉理工大学 信息工程学院,湖北 武汉 430070)
0 引 言
为了解决5G通信中室内外网络环境的拥塞[1-3],实现高速率、低时延要求,频谱资源更丰富、可利用频带宽的毫米波,被作为关键技术引入5G通信。我国5G商业预留了26.5 GHz~29.5 GHz毫米波段作为推进5G后续建设的重点频段[4],5G涵盖的各种物联网场景频率达到78 GHz~90 GHz[4,5]。这都需要5G毫米波信道特性的自动化测量和智能建模技术支撑[6-8]。
5G中要使用MIMO天线和波束成型技术,毫米波频段测量建模的参数既需要传统的路径损耗,还引入角度扩展等新的信道参数。要求在传统测量技术中增加各个方向的测量,使测量方式和建模技术变得更复杂,时间大幅延长[9-12]。利用先进计算机技术、商用编程仪器等,研发自动化测量和智能信道建模技术,成为移动通信新无线技术的一个重要研究方面[13-16]。
1 系统构成方案
信道测量是获得无线信道特性的最直接有效方法,即通过大量的实际测量对实际电波环境中电磁信号传播进行统计性信道建模[13,17]。常用信道测量系统一般分为频域信道测量系统和时域信道测量系统,前者在信号的发射和接收上主要使用发射机和接收机一体的矢量网络分析仪,后者则使用矢量信号发生器和和频谱仪进行信号的产生和采集。本文根据5G通信毫米波信道传播损耗、角度参数的测量要求,选取时域测量技术实现控制5G不同频段毫米波在各传播方向上的自动化测量,形成基于测量数据的智能信道特性建模和自适应选出最优信道模型的方法及其技术。
为实现这些功能,本文构建的技术方案如图1所示,共4个部分。第一部分是毫米波收发设备,选用具有程控功能的通用设备构建,用于不同频率毫米波信号的产生和接收。第二部分是可编程转台系统,实现系统不同角度路径损耗的自动化测量。第三部分是上位机伺服系统,运行系统软件,实现收发系统和转台的控制、接收数据的存储记录。第四部分是系统控制处理软件,要求可对收发机的频率、幅度和系统工作参数进行设置,能合理对系统各部分进行资源分配和实时调度,并根据计算机伺服系统中记录存储数据使用BP人工神经网络(back propagating arti-ficial neural network)进行智能建模,实现信道特性的自动分类建模,并输出最优模型参数,完成数据后处理。
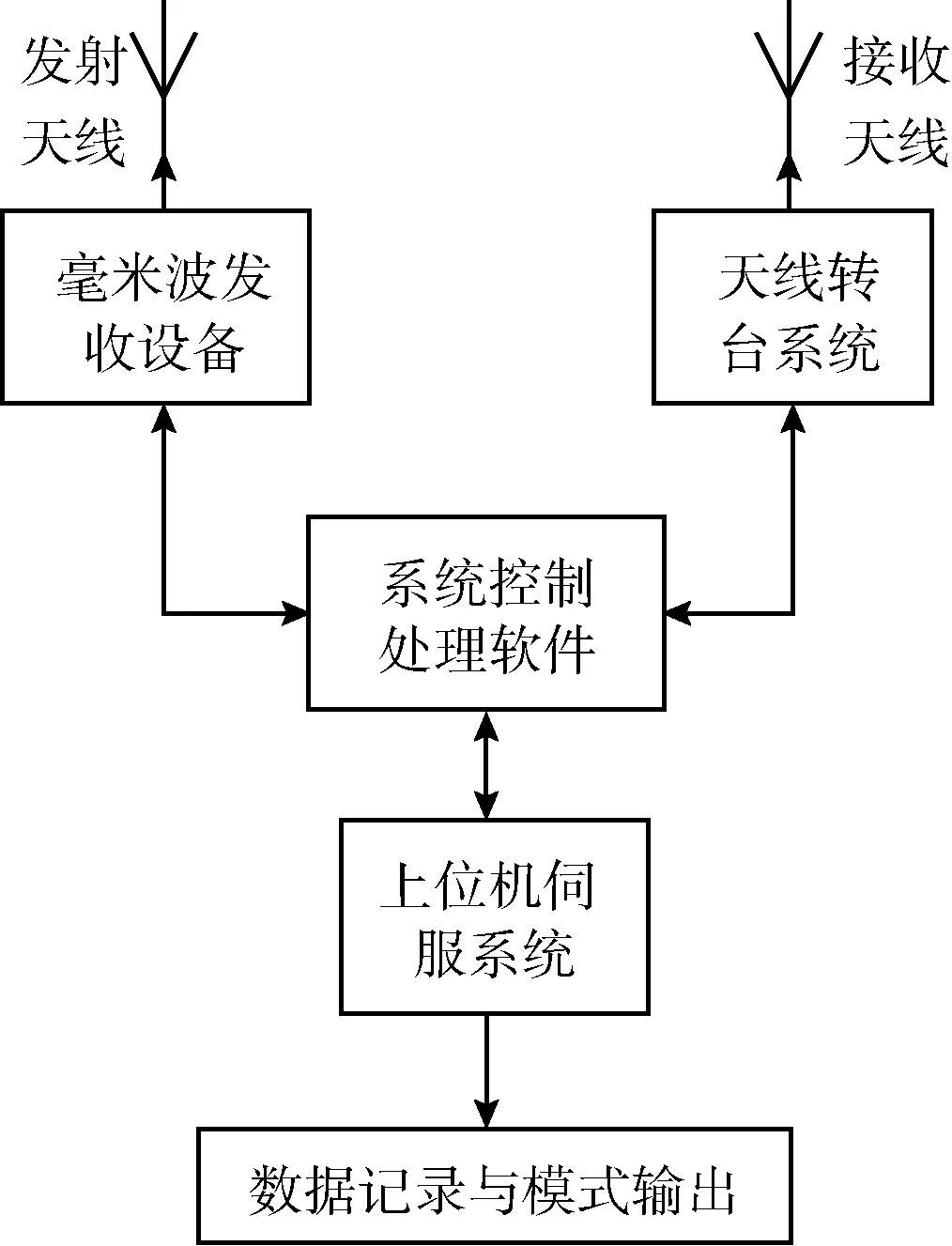
图1 技术方案
2 系统硬件实现
本文选用是德科技信号发生器、频谱分析仪和自主设计高精度天线转台,配置毫米波扩展部件,形成毫米波信道自动化测量和智能化建模技术的硬件系统,基本系统如图2所示。
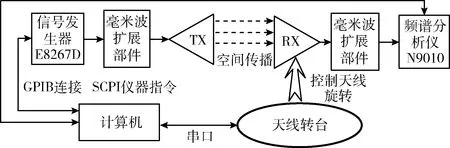
图2 系统框架
2.1 毫米波收发设备
如图2所示,本文选用是德科技E8267D矢量信号发生器、N9010A频谱分析仪及其扩展部件作为收发设备。收发设备使用上位计算机控制,通过GPIB转USB接口使用SPCI仪器指令对信号发生器和频谱分析仪进行远程控制,信号发生器产生线性频率信号并由发射天线辐射后经过相应传播环境,最后由接收天线接收并由频谱分析仪采样存储。系统基础发收设备的输出频率为31.8 GHz、接收频率为44 GHz,外部扩展组件为达到90 GHz的配置。
系统可配置至90 GHz的不同分段收发天线。本系统基础配置为400 MHz~60 GHz的三分段喇叭天线3组。本文给出了使用18 GHz~40 GHz的一组天线的测试研究结果。该组天线和系统线缆在24 GHz和28 GHz的相应参数见表1。
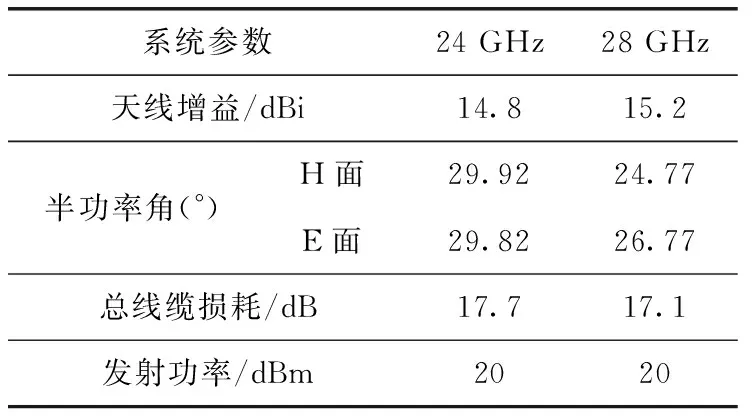
表1 系统参数
2.2 天线转台
在使用方向天线进行信道测量的过程中,为了更好的对毫米波信道中到达角、角度扩展和多径等小尺度参数进行测量,本文在C++平台通过串口对设计的天线转台进行控制,以实现自动化控制测量过程中角度参数的控制与获取。在机械结构上为了减少金属表面对电磁波的反射现象,转台整体结构和固定螺丝使用光敏树脂材料进行3D打印。使用微处理器、步进电机和自行设计的转台结构研发了如图3所示的双轴天线转台系统。
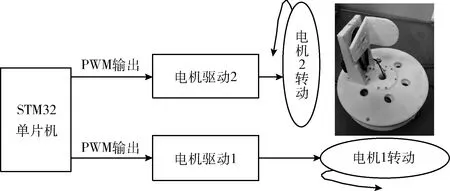
图3 天线转台系统框架
该天线转台使用STM32单片机为控制芯片,电机驱动使用三洋半导体公司PWM恒流控制双极性步进电机驱动芯片LV8729V,步进电机使用扭矩为0.6 N*m、步进精度为1.8°的42步进电机。步进电机驱动电路如图4所示,图中芯片外围供电电压均由外部稳压芯片提供,第6、13、14引脚(ST/FR/STP)为外部逻辑输入引脚,通过光耦隔离器与MCU相连接。MA1、MB1、MA2、MB2为电机驱动输出端,输出端电流大小可以通过21引脚(Vref)端的输入电压确定,计算公式如式(1)所示
(1)
本文驱动电路中R3阻值为0.2 Ω,所选择42步进电机额定电流的大小为1.6 A,固选择输入电压Vref=1.4 V,以确保步进电机正常工作。
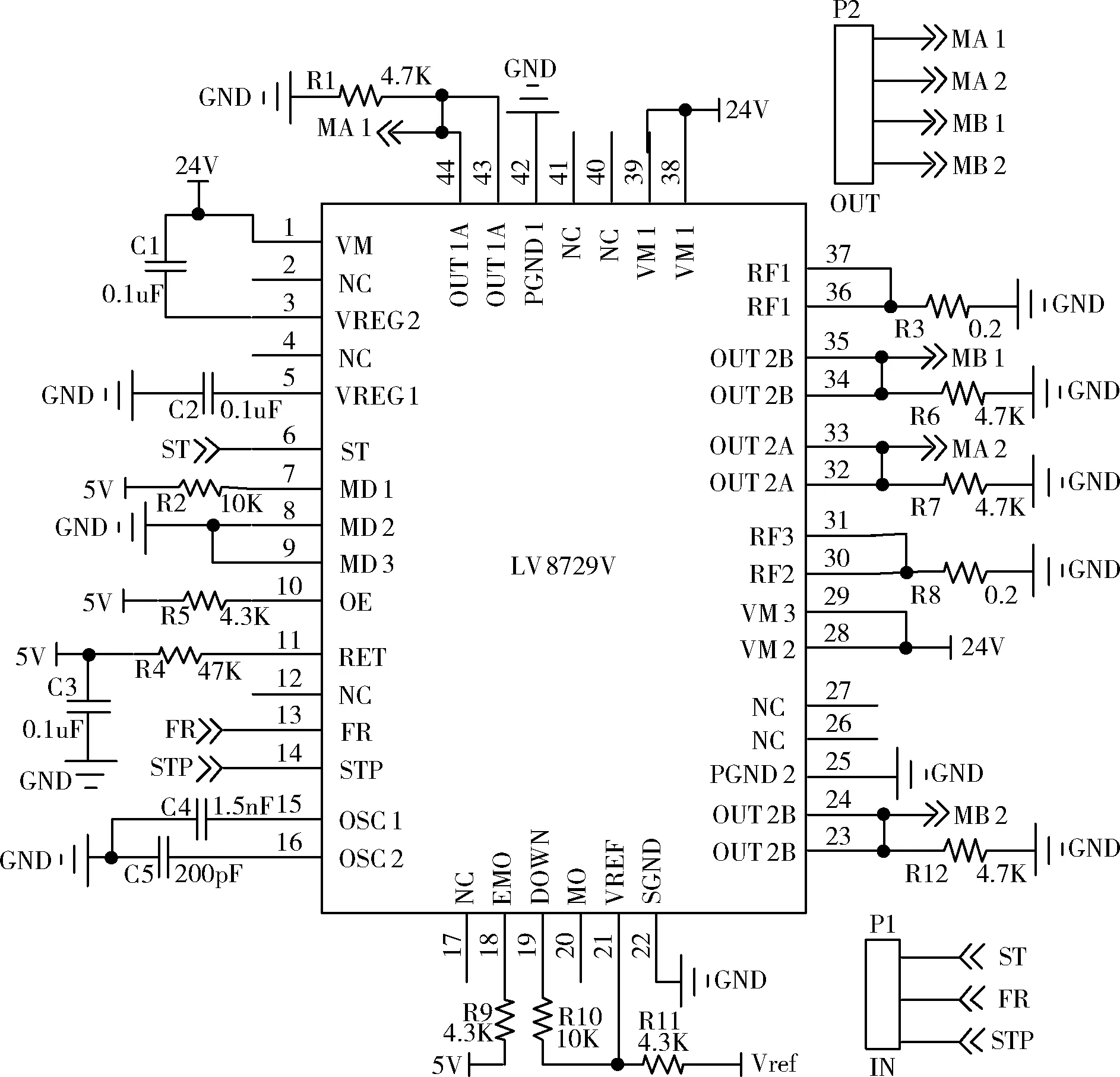
图4 步进电机驱动电路
在电机转动过程中可以通过细分方法有规律的对步进电机A,B线圈中的电流进行正弦变化控制,实现对电机整步位移的分解,从而达到对步进电机更精确的控制。通过对LV8729V芯片7、8、9引脚的输入电平控制可实现步进电机细分功能,本文根据系统测量时间,选择步进电机细分方式为1/2细分。
如图3所示,MCU控制端通过输出PWM脉冲信号到电机驱动电路,最终驱动步进电机转动。通过步进电机1实现转台方位角的旋转,步进电机2实现转台仰角的旋转,以实现全方位全自动的测量。
3 系统软件
系统软件结合Qt在C++平台上使用SCPI仪器指令对是德科技信号源E8267D、频谱仪N9010A和自主设计天线转台进行整体系统控制,完成系统自动化测量,并在数据后处理中使用Matlab完成信道模型建模和最优模型输出。
3.1 SCPI收发设备控制软件
3.1.1 控制语言
为了规范和方便不同的制造商的程控仪器的使用,电气和电子工程师协会(IEEE)在上世纪90年代提出了可编程仪器标准命令SCPI(standard commands for programmable instruments)。该仪器控制指令在自动化测试设备的设计中具有很好的兼容性,在物理层电气的连接上支持GPIB、RS232串口、以太网(LAN)、VXIbus等硬件总线;在软件层面该仪器编程指令更是支持如C/C++、JAVA、FORTAN等多种编程语言,易于各种商用程控仪器测试程序的移植。其缩短了自动测试设备程序的开发时间,使得各式各样的可编程自动化测试系统被广泛应用到工业和社会生活的各个领域,极大地促进了电子测量系统的发展[18]。

3.1.2 程序流程和功能
系统整体控制流程如图5所示。系统由电脑主机输入各设备的接口信息、所需要测试的频率、扫描方式、转台步进角度等系统参数和测量方式控制参数。测量中电脑主机首先对信号发生器进行设置,然后控制频谱分析仪进行预采样,验证采样信号的频率与设置的频率是否一致,并对50次采样信号的平稳度进行相应计算,若连续50次的预采样存在较大的波动则直接反馈相应的信号并结束程序。当确定采样信号为有效信号后,使用3.2节转台控制流程对转台进行旋转,在旋转完成后系统控制信号发生器和频谱分析仪完成相应测量频段采样,并将接收端得到的信号频率和强度等信息存储到电脑中。在完成所有测量工作后系统恢复原位置并停止。
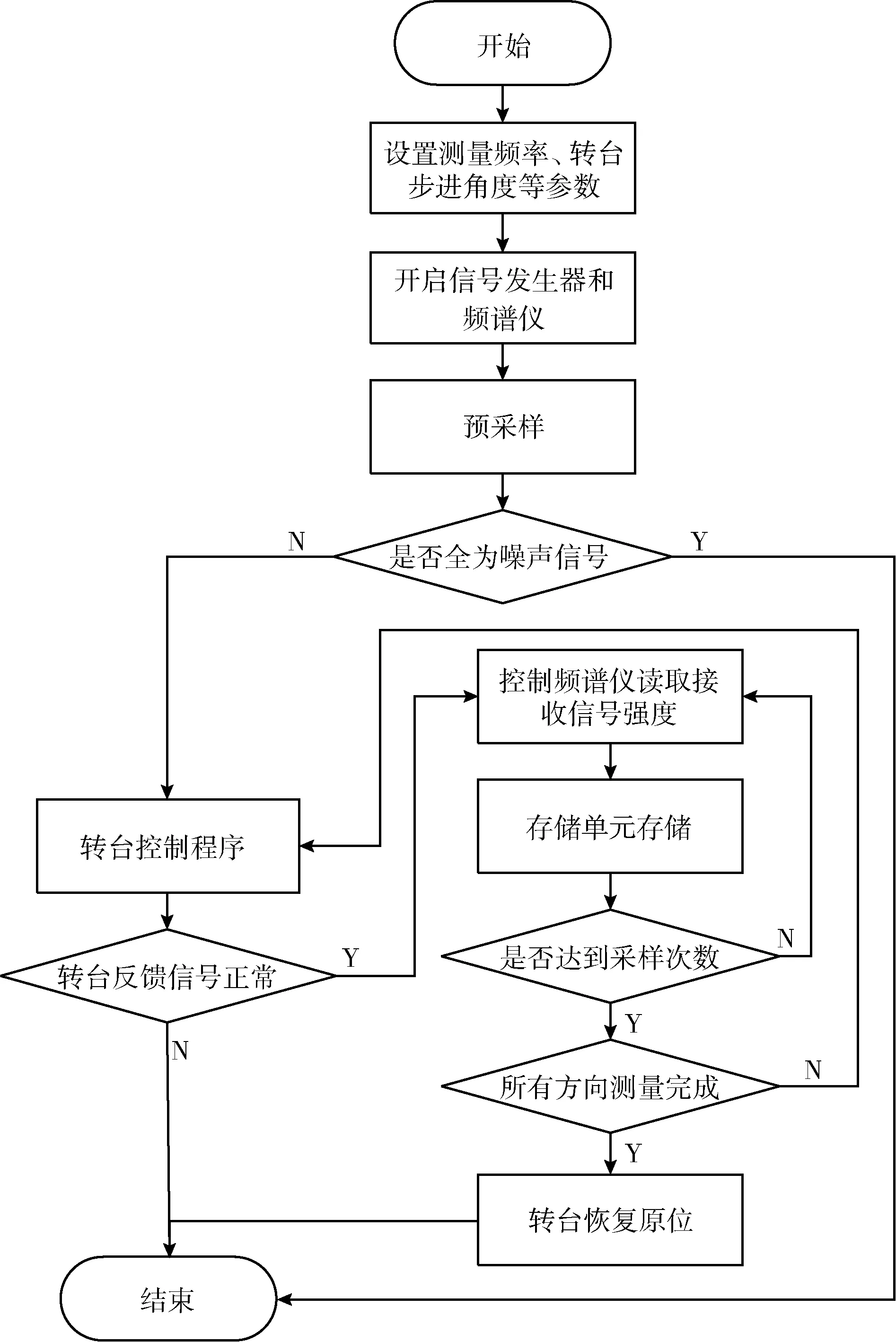
图5 系统流程
3.2 转台控制系统

天线转台控制的流程如图6所示。由图6可知微处理器MCU在接收到电脑主机发送的信号后,对信号按相应的字符进行读取和分析,确定旋转电机、旋转方向、旋转角度后,通过电机驱动对转台进行相应转动,转台完成转

表2 天线转台串口通信信号格式
动后将通过串口向电脑主机回复相应的信号,电机转动期间电脑主机不进行任何操作,在接收到MCU转动成功的信号后电脑主机将通过SCPI仪器指令控制信号源产生相应频段毫米波信号,并同时使用频谱仪记录此时的测量数据和转台角度,若转动异常则直接结束程序的运行停止测量。
3.3 信道模型及智能建模流程
不同环境中毫米波传播特性往往不同,对毫米波信道测量结果进行分析和提取是信道建模中的重要问题。国内外各研究机构在对毫米波大尺度路径损耗的建模中使用自由空间邻近参考距离模型(close-in free space reference distance path loss model,CI)或滑动截距模型(floating-intercept path loss model,FI)对室内外环境路径损耗进行建模,其中CI模型和FI模型表达式如式(2)和式(3)所示[5,6,17]

(2)

(3)

在使用CI模型或FI模型对典型环境中毫米波信道进行建模的过程中,往往只能对单一可视区域(line of sight,LOS)或非可视区域(non line of sight,NLOS)环境进行建模,而在LOS区域和NLOS区域共存的复杂室内环境建模过程中其适用性往往较差。在复杂环境中为了对毫米波在LOS区域和NLOS区域传播特性进行充分考虑,通常使用式(4)给出的分段模型进行建模
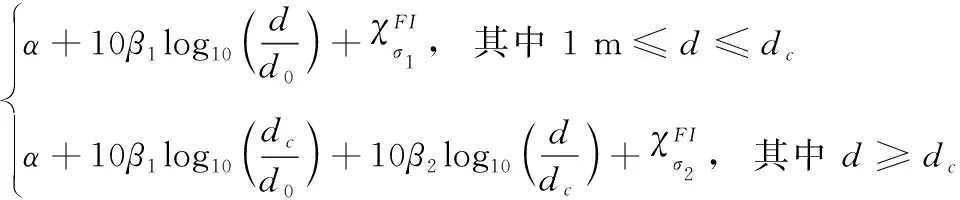
(4)
在实际信道建模过程中往往通过人为对实际信道测量结果进行判断后才选取相对应的路径损耗模型建模。本文在对毫米波大尺度损耗建模上,在Matlab数学处理软件上使用误差反向传播的前馈BP神经网络对各种测量环境中大尺度信道模型路径损耗因子进行特征提取,并实现对多类信道环境进行分类,最后根据分类结果选取合适信道模型对测量结果进行建模,结合BP神经网络的路径损耗建模流程如图7所示。
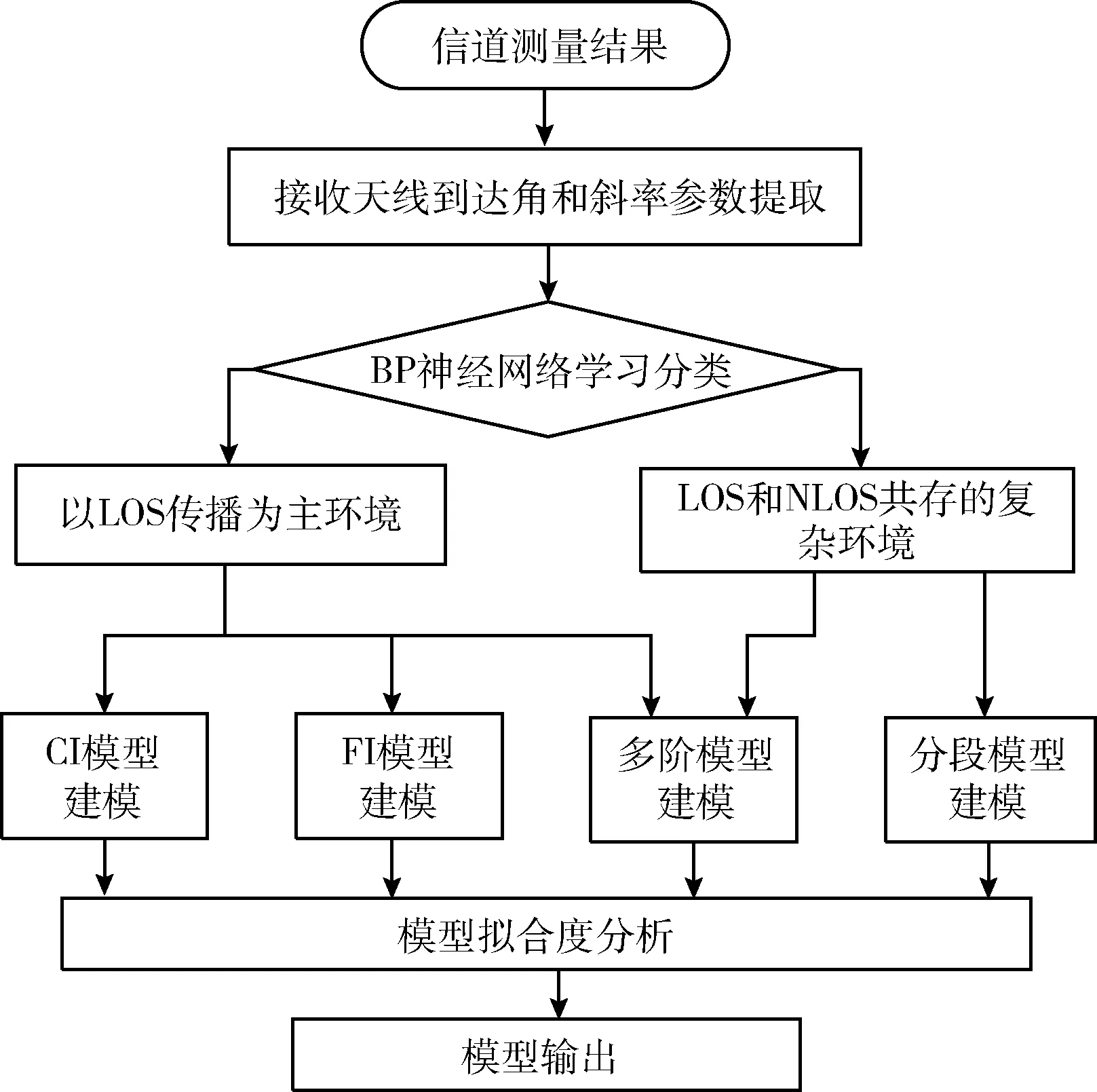
图7 路径损耗模型建模流程
由于不同类型的环境中接收天线的到达角往往不同,并且在只有LOS区域存在的传播环境和LOS与NLOS共存的复杂传播环境中建模模型的路径损耗因子和阴影衰落往往也各具差异。将这类具有非线性特征的信道参数供BP神经网络进行学习,构建神经网络可以有效对不同类型环境进行分别。系统在建模过程中会根据发射天线的离开角和接收天线到达角判断该系统中的主要传播环境机制,并根据利用大量实测数据构建的BP神经网络对实测数据进行分类,在确定环境类别后使用相应的模型对该路径损耗进行建模,最后输出与测量结果相适应的路径损耗模型。
4 性能分析
本文成功研发上述软硬件,集成为整体系统,联机调试成功。为分析本文提出技术和实现系统的功能。将系统在微波暗室和商用系统进行了天线方向图测试比对说明方向测量性能,在实际走廊环境中对22 GHz~29 GHz毫米波信号进行了信道的测量和建模,验证信道参数自动测量性能和智能建模的效果。
4.1 方向测量性能
方向测量使用天线转台实现,为说明其性能,设计了对比实验测试。使用该天线转台在微波暗室中对标准喇叭天线的天线方向图进行相应测量,然后与商用DAMS7000天线转台的相同测量作对比。
在微波暗室中对18 GHz~40 GHz标准喇叭天线做了天线方向图对比测量。图8绘出了28 GHz的方向图测量结果。图中虚线为商用转台测量结果,实线为本文设计转台测量结果,图8(a)和图8(b)分别为28 GHz喇叭天线E面和H面归一化方向图测量结果。
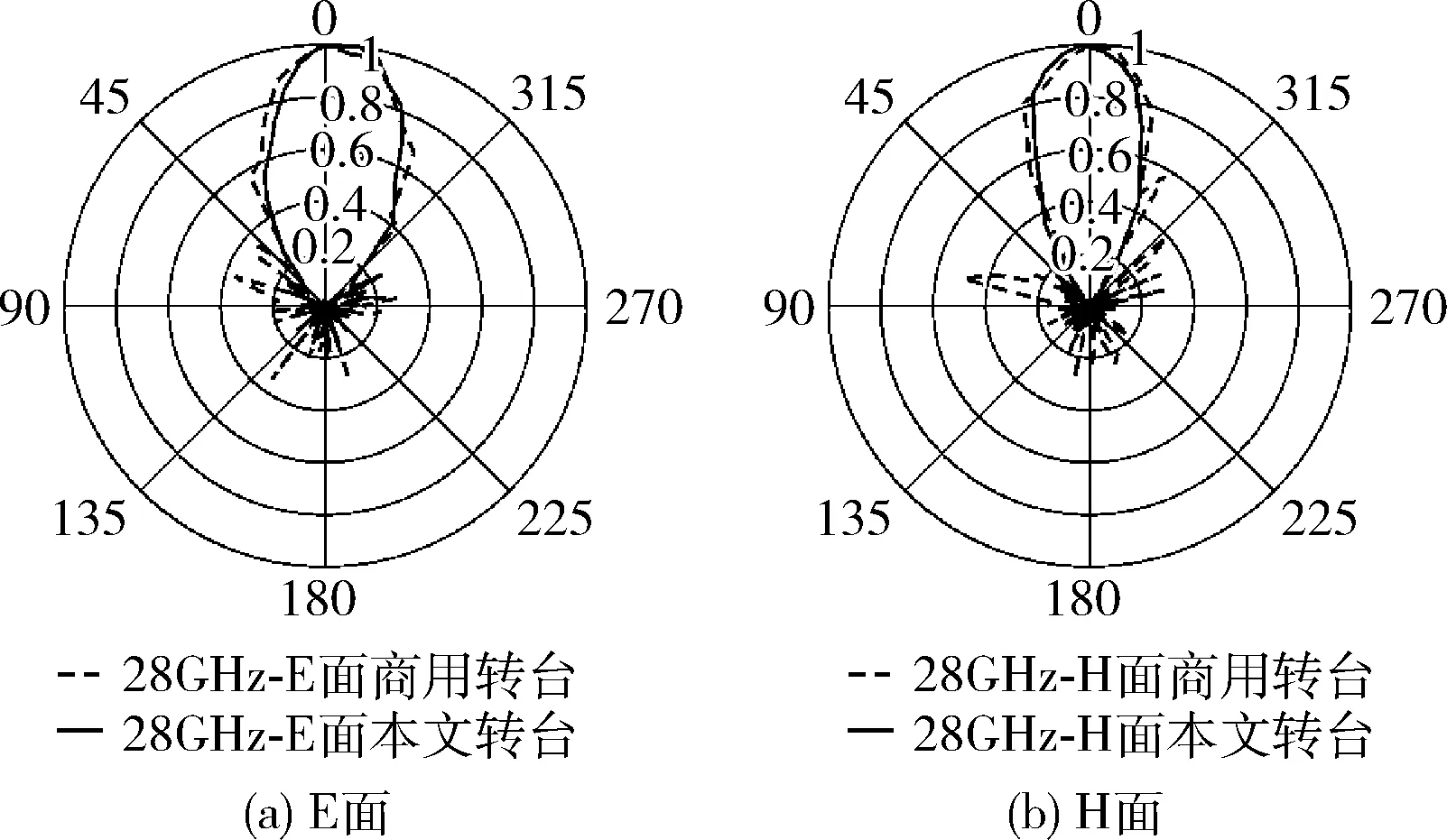
图8 28 GHz天线方向图实际测量结果
由图8中可以看出本文使用的标准喇叭天线具有较好的方向性。表3给出了方向图归一化后、本文转台与商用转台之间不同步进间隔下24 GHz和28 GHz的平均测量误差,可以看出在主瓣方向-30°~30°范围内,转台步进精度为9°时的测量误差约在-0.0249~-0.0506,步进精度为4.5°时的测量误差约在-0.0235~-0.0208。可见该系统用于实际信道环境测量中,可以获得较高的方向精度。
4.2 BP智能建模
BP神经网络是一种误差反向传播的前馈神经网络,可以通过输出层与实际数据之间的误差对网络中隐含层权值和阈值进行调整,最终实现期望输出的多层神经网络优化算法[19]。针对毫米波在LOS与NLOS共存环境中应用,各区域中路径损耗具有不同路径损耗因子的建模困难,本文对多种该类环境中毫米波路径损耗建模结果使用BP神经网络进行学习,构建了可以区分LOS区域与NLOS区域的神经网络建模技术。
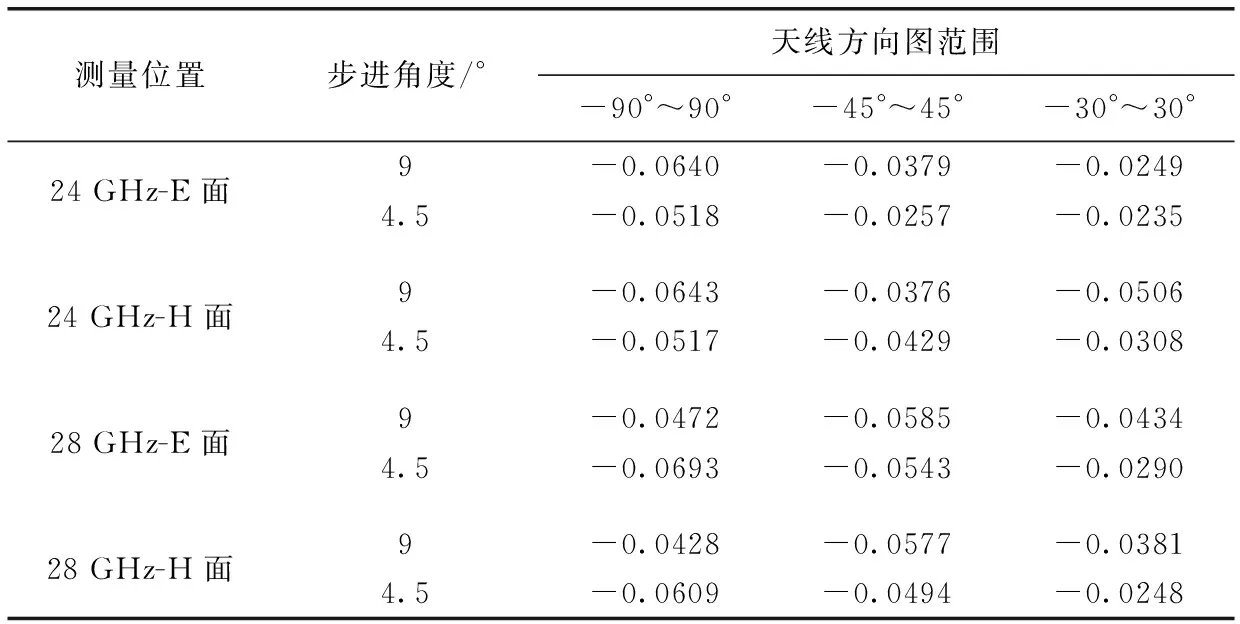
表3 本文转台与商用转台的测量平均误差
建模技术中构建的神经网络包含6个输入参数,9个隐含神经元,1个输出参数。输入层参数包含根据路径损耗实测值所提取的路径损耗因子n和损耗系数β。在神经网络的训练中,训练数据集对所构建的神经网络有着直接影响,但实际信道测量数据往往有限,由于无线信道中阴影衰落可以表示在一定范围或时间内信道大尺度损耗的波动,所以在测量数据不足时可利用阴影衰落对所测量的路径损耗进行数据扩展,故使用LOS与NLOS区域共存环境中路径损耗实测结果和文献[5-7]中的部分测量数据进行数据扩充后形成200组训练样本对BP神经网络进行训练。并使用文献[20-24]中的实测数据对已训练完毕的神经网络进行验证,图9为本文建模技术中BP神经网络对验证数据集的区分结果。
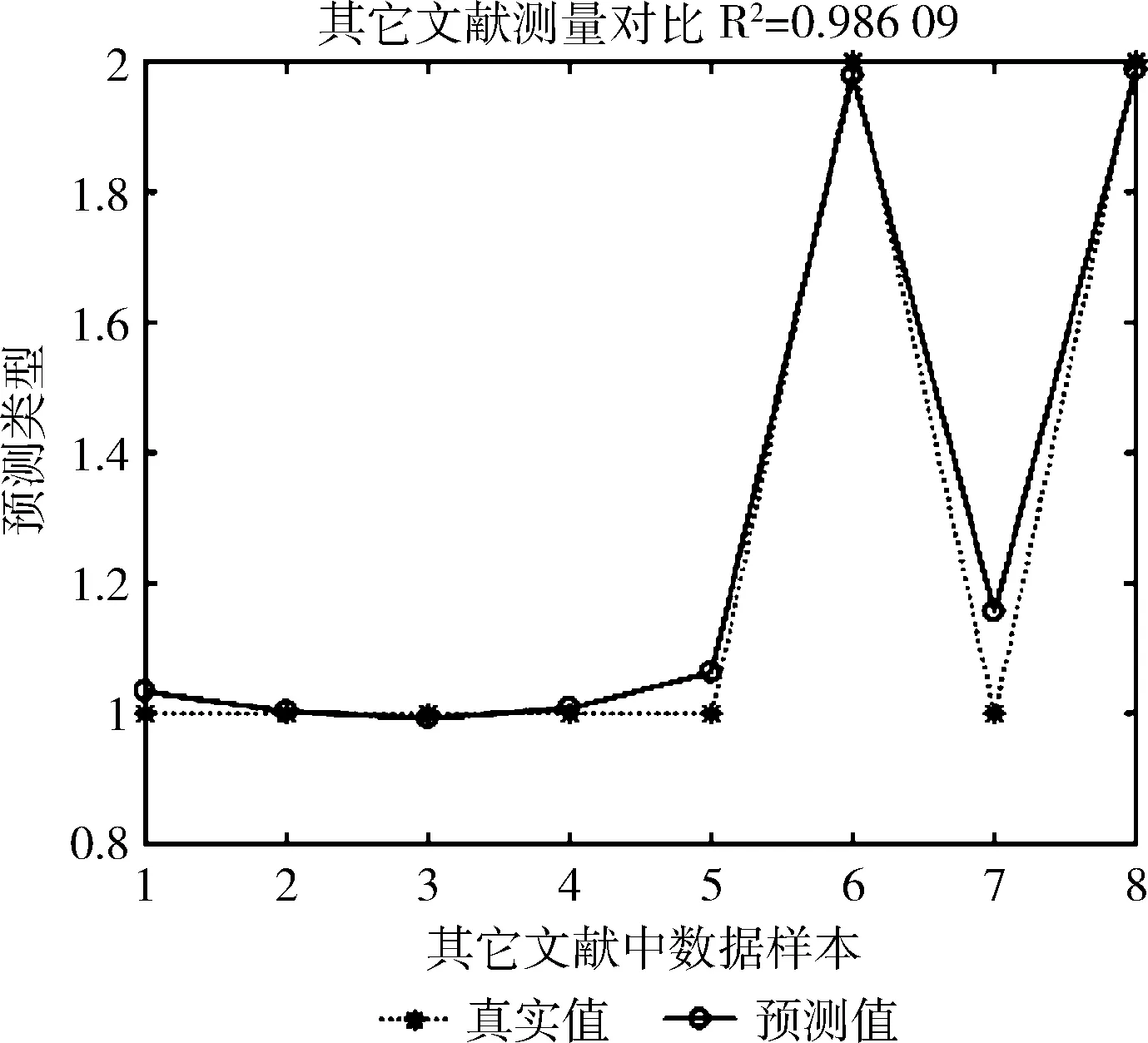
图9 BP神经网络模型测试数据集预测结果
图9中纵坐标为预测类型,当预测值接近1时为仅存在LOS的传播环境,预测值等于2时为LOS与NLOS共存的复杂环境,横坐标为文献[20-24]实测路径损耗结果所构成的样本(共8组)。其中第6组和第8组样本为LOS与NLOS区域共存传播环境中的路径损耗测量数据(文献[23,24]中数据)。其余为仅存在LOS区域的传播环境,可以看出本文所构建的神经网络能有效区分部分典型毫米波传播环境,能针对不同环境的特征使用特定信道模型进行建模。
4.3 实际走廊环境测试
使用该系统对走廊环境进行了自动化测量。测量中计算机控制收发设备在22 GHz~29 GHz毫米波频段进行线性扫频、控制天线转台驱动窄波束喇叭天线间隔18°进行转动。测量实际环境如图10所示(图中嵌入的是控制软件的控制界面),接收天线以等距离d=1.1 m为间隔进行测量,每个测量位置接收天线在各方向均采样100次。
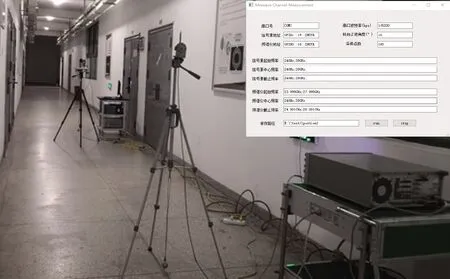
图10 实际测试环境
测量完成后使用Matlab对测量环境中不同频点测量数据的离开角、平均到达角、角度扩展等信道参数进行分析提取。本文选取其中24 GHz和28 GHz两个频率的结果作以说明。平均到达角和角扩展见表4,可以看出走廊环境中传播主要以视距传播为主,平均到达角均接近0°方向,即指向发射天线、角度扩展分别为54.45°和58.84°。
在大尺度路径损耗建模结果中,系统自动对走廊环境中所测量的路径损耗结果进行处理,并根据BP神经网络智

表4 走廊环境信道平均到达角和角度扩展
能建模结果得到了如表5所示的视距环境下路径损耗CI模型、FI模型、多频率ABG模型的建模结果。可以看出系统输出的模型为单斜率模型。24 GHz的CI模型和FI模型的路径损耗因子分别为1.352和1.182,而28 GHz的CI模型和FI模型的路径损耗因子分别在1.442和1.334,均较自由空间中的路径损耗n=2小,符合走廊环境中四周封闭的类波导结构物理机制。由于CI模型具有实际物理意义,在自适应建模过程中结合各模型所设置阈值,系统最终输出模型为CI模型。
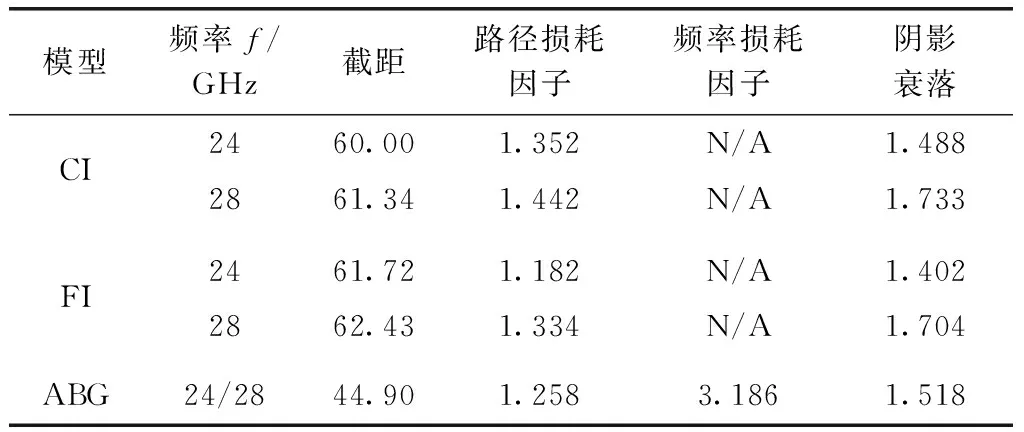
表5 走廊环境路径损耗建模结果对比
为了验证该系统自适应建模适用性,使用该自适应建模单元对其它文献中的路径损耗测量结果进行了建模,建模结果见表6。
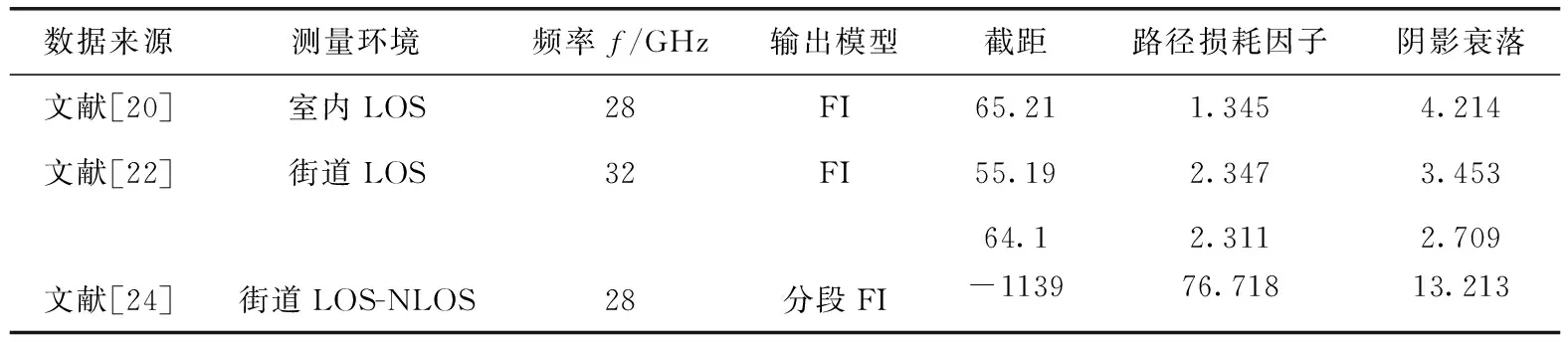
表6 其它文献中路径损耗自适应建模结果
由表6中建模结果和实际测量结果可以看出,在LOS传播环境中系统自适应输出模型为单斜率FI模型,与原文献[20,22]中建模结果相符,在LOS-NLOS复杂室外传播环境中,由于NLOS区域的存在导致在该区域路径损耗急剧增加,自适应单元也选择了合适的分段FI模型进行建模,并输出了路径损耗变化的断点约在距离发射天线76.9 m处,与实际结果基本相符。
上述结果说明,本系统可以在典型毫米波传播环境中进行多频段信道自动化测量,获得相应信道角度参数,并且可通过角度扩展、路径损耗因子、阴影衰落等信道参数对建模结果进行判别并输出最终优选模型,对实际信道测量具有实际价值。
5 结束语
本文研究了5G毫米波信道特性自动化测量和智能建模技术,形成了一种方案并构建了原型系统。本系统由信号发生器、频谱分析仪和天线转台构成,解决了系统整体控制、高精度控制转台和人工神经网络智能建模技术等关键技术。系统调试和整体性能验证表明,该系统可对毫米波信道路径损耗、平均到达角、角度扩展等参数进行测量,能给出多种模型的建模结果,具有在给定判据特征情况下自适应输出最优模型及其参数的能力。表明可以在未来5G毫米波典型应用场景进行信道测量。
本文仍然可以使用SCPI仪器对系统信号实现多种方式的调制,在未来研究中对信号的时延特性和多普勒频移等小尺度参数进行进一步研究。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
防爆电机(2021年5期)2021-11-04
黑龙江科学(2021年16期)2021-09-09
火控雷达技术(2021年2期)2021-07-21
家庭影院技术(2018年9期)2018-11-02
北京航空航天大学学报(2017年3期)2017-11-23
中国交通信息化(2017年10期)2017-06-06
电子制作(2016年1期)2016-11-07
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
现代防御技术(2014年6期)2014-02-28
