
颞下颌关节高副结构仿生研究*
2022-05-19 05:17许德章
菏泽学院学报 2022年2期
龚 锐,许德章
(安徽工程大学机械工程学院,安徽 芜湖 241000)
引言
2019年底,新型肺炎病毒给全球带来了极大挑战.新型肺炎重病患者通常需要人工输氧,在气管插管时,医生面临感染风险.研发一种气管插管机器人,能够有效地避免医护人员感染.研究一款安全可靠的机器人,前期需要多次实验验证.如果直接进行人体实验,无法保障患者的安全.针对机器人插管实验,我们需要研制一款实验模型.目前,已经有许多关于仿生下颌运动的研究.王倩竹[1]提出了一种基于四连杆机构的咀嚼机构,能够模拟人体在进行咀嚼时下颌运动规律.Chen等[2]研发一种用于咀嚼评价食品的机器人,由三自由度连杆构成,能够较好的复现人体口腔环境.Wen等[3]提出了一种6PUS-2HKP ( 6个棱柱形通用球面链,2个较高的运动副)冗馀驱动并联机器人( RAPR ),考虑肌肉骨骼生物力学,研究食物分解所需的最佳刚度、能量效率和咀嚼力.
上述咀嚼结构虽然能够初略地模拟人体的咀嚼运动,但体型过大,无法安放到机器人气管插管的实验模型内.市场上也有许多人体上呼吸道的模型,然而这些模型却又过于简单,都是针对医护人员训练使用,与真实人体存在许多差异,无法用于机器人的插管仿真实验.本文主要是研发一款高仿真度的实验模型.
1 颞下颌关节运动分析
1.1 颞下颌关节生理结构
颞下颌关节的构成主要分为上下两大部分.由图1所示,上半部分主要由颞骨关节窝和关节结节组成.下半部分主要由下颌骨髁突,以及位于两者之间的关节盘组成,外包由关节囊和囊内外韧带所构成.
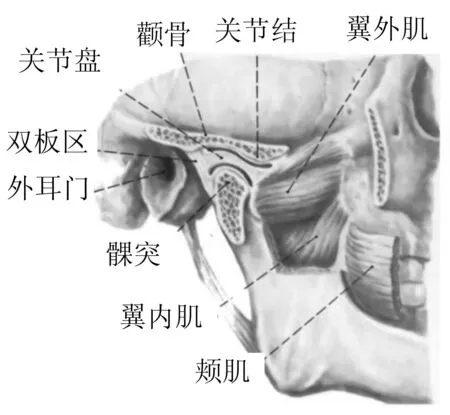
图1 颞下颌关节图
颞下颌关节的运动和约束,其肌肉和韧带组织建模相对简单.颞下颌关节是一个在可移动基底上的关节,开口(张嘴)时,下颌头旋转,关节盘与下颌头一起在上关节腔内向前移位,移至关节结节的下方.牵引力来自张嘴肌(翼外肌、二腹肌、舌骨上下肌);在舌骨固定时下颌舌骨肌和颏舌肌也参与颌骨下降牵引作用,当下颌骨固定时能提起舌骨.闭口(闭嘴)时,下颌头反向移动和旋转,牵引力来自闭口肌(颞肌、咬肌、翼内肌).
1.2 颞下颌关节运动特征
颞下颌关节的运动可以分为三种基本运动:开闭运动、前后运动和侧方运动.通过髁突的转动和滑动运动实现.下颌在做开闭运动时,涉及不同的运动状态,分别为小开颌运动、大开颌运动、最大开颌运动.如图2所示,三种运动状态存在着明显的差异.

图2 各状态下的TMJ图
颞下颌关节运动时,涉及到不同的肌肉协同运动,如图3.
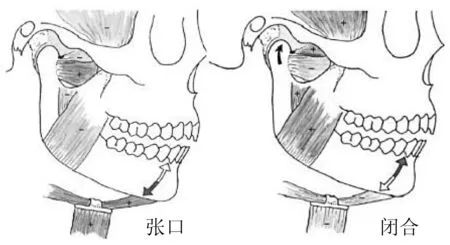
图3 开闭口运动时所涉肌肉作用图
1)开口运动
在做开口运动时,下颌骨从后退接触位开始,在翼外肌和舌骨上肌群的作用下,下切牙向后下方运动18~25 mm.小开口运动时,髁状突在关节下腔做纯转动.大开口运动时,向下运动,边做滑动运动,边转动,主要以滑动为主,直至髁状突运动到关节结节的前下方.继续开口,髁状突又表现为纯转动,直至最大张口位置.下颌颏部向下向后运动,髁状突运动的距离与下颌颏部运动的距离之比大约为1∶3.
2)闭口运动
闭口运动时,各部位的运动方向与开口方向相反.动力来源于翼内肌、咬肌和颞肌,颞肌、咬肌及翼内肌的收缩,牵引下颌向前上方运动.起初,髁状突单纯的转动,随后沿着关节结节的后斜面边做滚动边做滑动回到关节窝.
2 颞下颌关节运动副分析
2.1 运动副特点
机构是由多个构件构成,每个构件都是能够独立运动的单元体.机构中的每一个构件都要通过一定的方式与其他构件相互联接,使得两个构件直接接触,且有一定的相对运动.两个构件之间的联接关系称之为运动副.根据运动副对构件相对运动约束情况和运动副元素接触情况的不同,运动副可分为低副与高副.两个构件通过面接触组成的运动副称为低副,其中包括转动副和移动副.两构件通过点或线接触的运动称为高副.
颞下颌关节是保证下颌骨各种复杂运动的关键.在口颌系统中,髁突被韧带与关节约束在颞骨关节窝中,紧贴着上颌骨运动,因此上下两个颌骨可以看成是两个刚体的接触[4],如图4所示,那么两者的接触可视为线接触的高副.
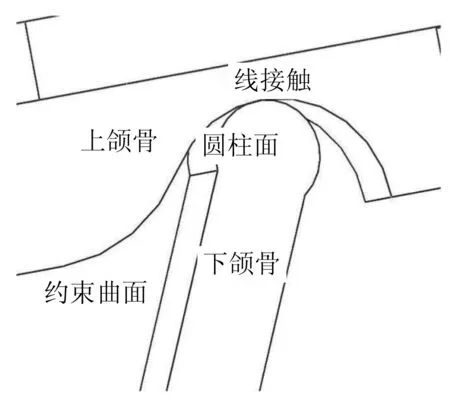
图4 上下颌骨高副机构图
2.2 运动方程计算


(1)
以分量形式表示为
(2)
令
(3)

因坐标系L2(t)相对于坐标系O2是固定的,则L2(t)相对于O2的速度VO2L2=0,则
VO2C2=AdgL2C2VO2L2+VL2C2=VL2C2
(4)
同理有
VO1C1=AdgL1C1VO1L1+VL1C1=VL1C1
(5)
通过L2(t)、C1计算C2相对于L1(t)的速度
VL1C2=AdgL2C2VL1L2+VL2C2
(6)
因t时刻C2相对于L2的位置为PL2C2=0、姿态为RL1C2=I,所以有
VL1C2=VL1L2+VL2C2
(7)
另有VL1C2=AdgC1C2VL1C1+VC1C2,因PC1C2=0,所以有
(8)
由式(5)、式(6)、式(7)和式(8)得
(9)


(10)

(11)
(12)
(13)
将式(10)、式(12)和式(13)代入式(9)中得
(14)
进一步计算得到Montana接触运动学方程
(15)
当vx=vy=0,且ωZ=0时,为纯滚动接触,其运动方程为
(16)
当ωx=ωy=ωz=0时,为纯滑动接触,其运动方程为
(17)
因为无法对人体下颌关节的运动直接测量,所以将其视作刚体求其运动方程,进而分析其运动.通过运动方程研究机械动力学和运动学,描述结构中的力与位移(包括速度和加速度),为仿生机构提供数据的支持.仿生机构的设计必须以计算数据为依靠,反应真实人体结构的运动.
3 仿颞下颌关节机构设计
3.1 机构自由度分析
在设计机构的时候,要考虑动力来源于外部作用力.基于人体解剖学研究成果,将主体分为上颌骨和下颌骨两个部分.人体口颌系统运动共有20多组肌肉,但开闭合运动涉及到的肌肉主要只有六组.将下颌骨看成一个刚体,受到颞下颌关节约束[6].因为有颞下颌关节的约束,下颌骨只有四个自由度.如图5中所表示,1和2是两侧的髁突沿着上颌骨的特定结构滑动.3和4为下颌骨转动与向两侧的平动自由度.
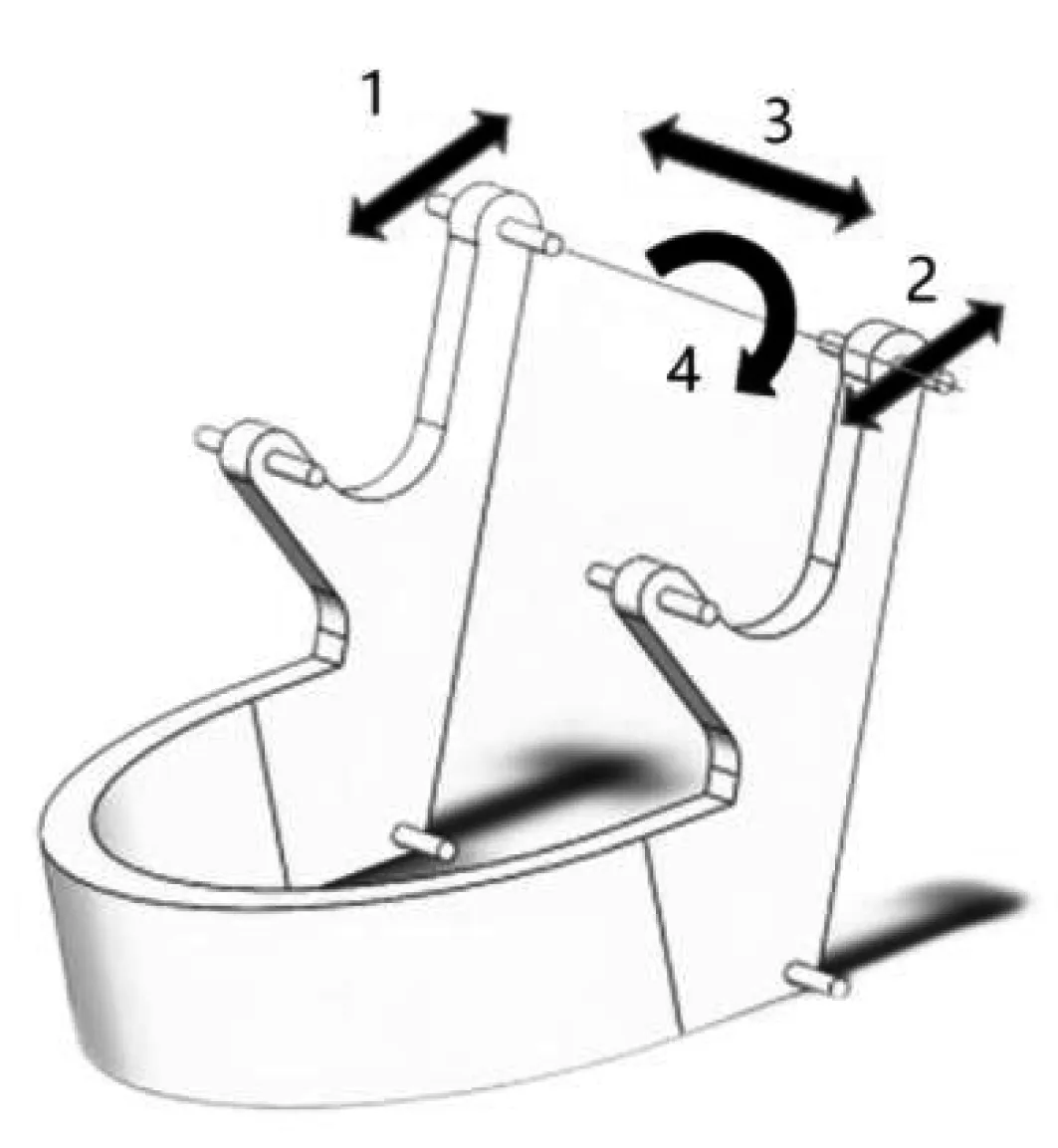
图5 下颌骨四个自由度图
3.2 颞颌关节仿生机构设计
机械传动广泛应用于机械工程领域中,主要是利用机械方式传递动力和运动的传动.分为两大类:一是依靠构件之间的摩擦力传递动力和运动的摩擦传动,例如带轮传动,摩擦轮传动和绳传动等.二是依靠主动件与从动件啮合或通过中间件啮合传递力或运动的啮合传动方式,例如齿轮传动和链传动、螺旋传动等.相比其他的传动形式,齿轮传动的优势明显:1)传动比准确;2)可以传递空间任意两轴间的运动和动力;3)传动的效率高;4)工作可靠,寿命长.
综合各种传动方式的优缺点和对颞颌关节的运动分析,本文采用齿轮组来实现颞下颌关节的运动仿生.如图6所示,将髁突设计成一个扇形齿轮,下颌能够自由的转动,下颌与传动小齿轮啮合,扇形齿轮的转动将会带动传动小齿轮的转动.传动小齿轮与转动大齿轮共同连接在转动轴上,具有相同的角速度,从而小齿轮带动转动大齿轮转动.转动大齿轮与上颌骨的齿轮路径啮合,大齿轮转动则会沿着路径方向滚动,将转动转化为线性的移动.连接杆起到将齿轮约束啮合的作用,连接杆会随着齿轮组的运动,沿着圆弧槽口运动.

图6 颞下颌关节齿轮组结构图


表1 渐开线圆柱齿轮模数
d=mz
(18)
压力角是物体运动方向与受力方向夹角的锐角,同一渐开线齿廓上各点的压力角是不同的,压力角已标准化α=20°.
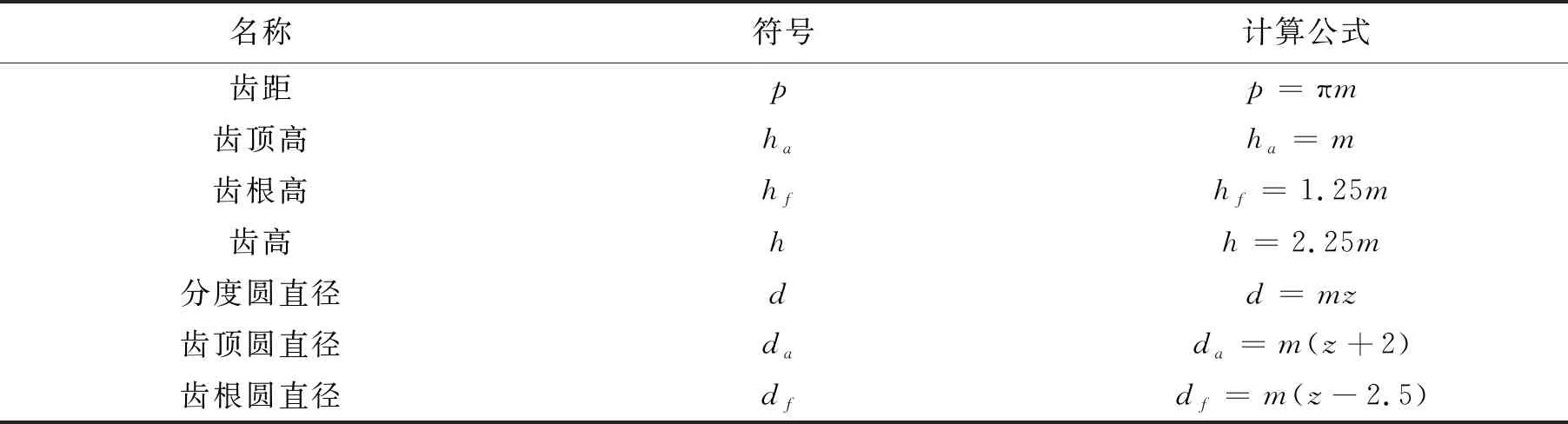
表2 外啮合标准直齿圆柱齿轮计算公式
两个渐开线齿轮相啮合需要具有相同的模数和压力角.两齿轮的传动比可以表示为
(19)
一对齿轮要保证能够实现连续的传动,需要保证重合度εα>1.重合度计算公式为
(20)
式(20)中αa1、αa2分别是轮1、轮2的顶圆压力角;α′为节圆压力角.
齿轮传动的标准中心距等于两轮的分度圆半径之和,即
(21)
3.3 机构运动状态分析
人体上下颌骨与颞下颌关节成对称关系,设计的仿生机构也成对称关系,颞下颌关节由两组相同的齿轮组构成.如图7所示,下颌骨由齿轮组约束在上颌骨上,在一定的空间范围内,下颌骨可以运动.

图7 颞颌关节仿生机构图
下颌在做开闭运动时,涉及几种不同的运动状态,分为小开颌运动、大开颌运动、最大开颌运动,如图8所示.

图8 各状态下颞颌关节机构图
4 仿真结果分析
为了验证所设计机构的准确性,对三维模型运动学仿真进行分析,观察测量机构开闭合的运动下,颞下颌关节的髁突中心点的运动轨迹如图9所示.由图中轨迹可以观测出,齿轮组机构能够对人体下颌骨运动具有较好的仿生.

图9 颞颌关节髁突中心点轨迹图
5 结论
本文根据人体颞颌关节结构特性和CT扫描影像,得到颞骨关节的几何特征,并设计了线接触的高副结构,分析了上下颌骨运动关系,建立了接触运动学方程.根据高副结构运动学分析,设计的齿轮组结构,能够有效的模拟颞下颌关节的运动,与其他结构相比,该结构能够更加精确地再现人类下颌运动的过程.对所设计的颞下颌关节机构进行了运动仿真,通过观察髁突的运动轨迹,结果表明该机构能够较好的复现人体下颌关节的运动规律,验证了机构的准确性.
猜你喜欢
昆明医科大学学报(2021年12期)2021-12-30
昆明医科大学学报(2021年1期)2021-02-07
婚育与健康(2020年9期)2020-11-09
中华老年口腔医学杂志(2016年3期)2017-01-15
中老年健康(2016年9期)2016-11-18
中华老年口腔医学杂志(2016年5期)2016-03-01
西南医科大学学报(2016年4期)2016-01-03
中国医疗美容(2015年1期)2015-07-12
中国医疗美容(2015年1期)2015-07-12
中国医疗美容(2015年1期)2015-07-12
