基于脉冲相干雷达的车辆检测算法
2022-05-19 13:31:20张先才张足生李益广郭小红
计算机工程与应用 2022年10期
张先才,张足生,李益广,2,郭小红,陈 伟,2
1.东莞理工学院 网络空间安全学院,广东 东莞 523808 2.广东工业大学 计算机学院,广州 510006
近年来,随着我国汽车保有量持续增加,城市中心区停车难问题日益严重,路边智慧停车管理系统已成为解决该问题的有效途径[1-2]。该系统的基础是实时车辆检测技术,在准确获得每个停车位的状态信息基础上,路边智慧停车管理系统可实现车位预约、停车诱导、停车计费等功能。
磁阻传感器、视频是目前主要的车辆检测技术。磁阻传感器成本和功耗低,生命周期长,但容易受到相邻车位、城市轨道交通等磁场干扰[3]。基于磁阻传感器的停车位检测已有很多研究,文献[4]提出了一种自适应阈值算法;文献[5]为了降低相邻车位干扰,综合相邻传感器的信息,通过计算相邻车位信号的相似度实现停车检测。相比磁阻传感器,视频可以获得更多的信息,比如车牌号,但是视频易受到天气和光照干扰,并且室外视频停车检测技术需要布电源线和通信线,安装和维护成本高。随着人工智能的发展,已有越来越多的研究将深度学习算法应用在基于视频的车辆检测中[6]。文献[7]提出一种基于Faster R-CNN[8]的车辆检测改进算法,可以较好地实现交通监控视频中的车辆检测;文献[9]提出了一种基于最新的YOLOv3[10-12]算法的实时车辆检测分类模型,该模型通过增强深度残差网络的特征提取能力,提高了复杂无约束自然场景下实时车辆检测的精度。
基于磁阻和视频的车辆检测技术大多受限于不同的干扰因素,虽然目前对各种干扰问题有较多研究,但是效果有限。而基于新型传感器的方法可以和这些方法互补。目前关于雷达的车辆检测研究,大多是基于激光雷达[13-15],且主要关注于自动驾驶领域。激光雷达探测距离远,精度高,但是在功耗、体积和成本方面皆不适用于停车位检测。
本文使用的脉冲相干雷达传感器(pulse coherent radar,PCR)是一种新型的传感器,它兼具脉冲式雷达低功耗和相位式雷达高精度的优点[16],面积只有29 mm2,成本远低于激光雷达,并且不受磁场、光照干扰。本文根据PCR雷达信号的特征,考虑到水和湿树叶等干扰,提出了一种基于PCR的停车检测算法。
1 问题描述
PCR基于信号传播时间来测量物体的距离,即无线电波由第一根天线发射,经物体反射后再由第二根天线接收,通过测量发射和接收信号之间的传播时间来判断物体的距离。本文采用的是型号为A111的雷达传感器,该传感器提供四种工作模式[16],其中Powerbin工作模式采样的信息量较少,能耗低,适用于停车位检测,下面给出该模式的雷达信号定义。
例如,起始检测距离是20 cm,检测范围为50 cm,如果分为5个Bin,每个Bin代表的距离范围依次为[20,30],[30,40],[40,50],[50,60],[60,70]。图1(a)是t0时刻传感器上方没有被物体遮挡时的信号,图1(b)是t1时刻其正上方0.5 m处有金属板时的信号。可见当有物体时,第3个Bin接收的振幅最大,则可以估计该物体的距离范围是[40,50]。
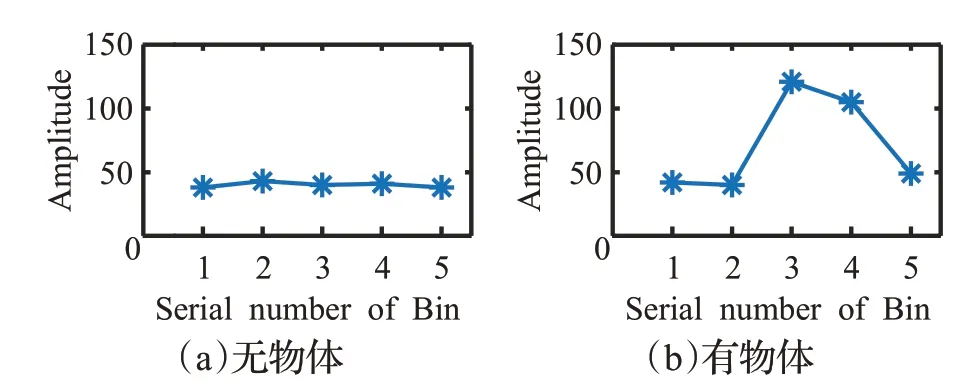
图1 无物体和有物体时的雷达信号Fig.1 Radar signal with object and without object
PCR对外界的光、声音、磁场和灰尘不敏感,因此不受这些因素干扰。玻璃、水、湿树叶等材料能很好地反射PCR发射的无线电波。路边停车检测,传感器节点置于地面以下,顶盖与路边齐平,当节点顶盖被水或湿树叶覆盖时,无线电波被反射,会影响车辆检测的准确性。为此将干扰因素纳入检测任务中,将停车位状态划分为四种类别,如定义2所示。
定义2停车位状态的集合为{ }S1,S2,S3,S4。各状态按次序分别指{无车且无干扰,有车且无干扰,无车且有干扰,有车且有干扰}。
基于定义1、定义2,本文算法可表示为:

其中,n为Bin的个数,Bin1(t),Bin2(t),…,Bin n(t)为t时刻的雷达信号,S(t)为t时刻的停车位状态。
2 算法设计
算法的框架如图2所示,包括添加扩展特征、分类算法和训练三部分。添加扩展特征:给雷达信号添加扩展特征。分类算法:对添加了扩展特征的雷达信号分类,得到该雷达信号对应的停车位状态。训练:根据雷达数据样本,利用粒子群优化算法[17]训练分类算法的参数。
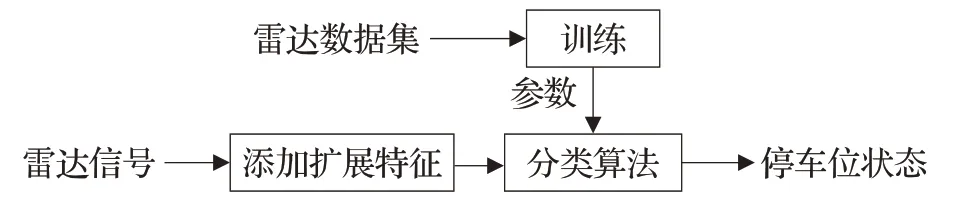
图2 算法框架图Fig.2 Algorithm framework
2.1 添加扩展特征
图3展示了不同停车位状态的20条雷达信号。S1、S3、S4之间差异较小,S2与其他类别差异较大。为了更好地区分S1、S3和S4,提取雷达信号的特征并将其作为雷达信号的扩展特征。将添加了扩展特征的雷达信号称为扩展雷达信号。
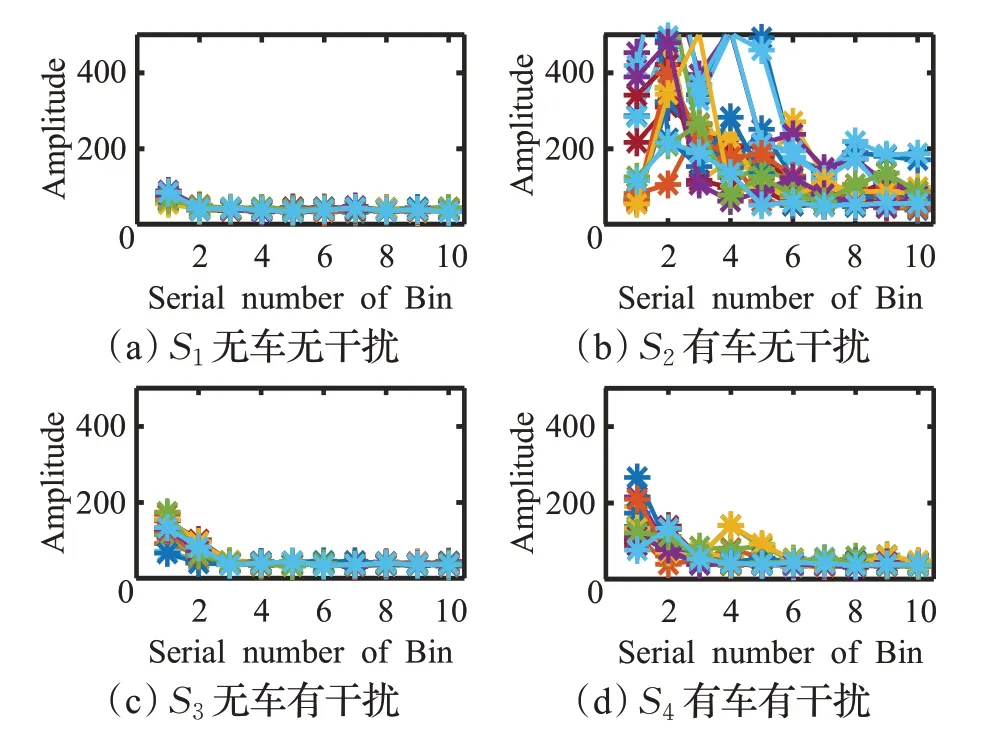
图3 不同停车位状态的雷达信号特点Fig.3 Radar signals of different parking space status
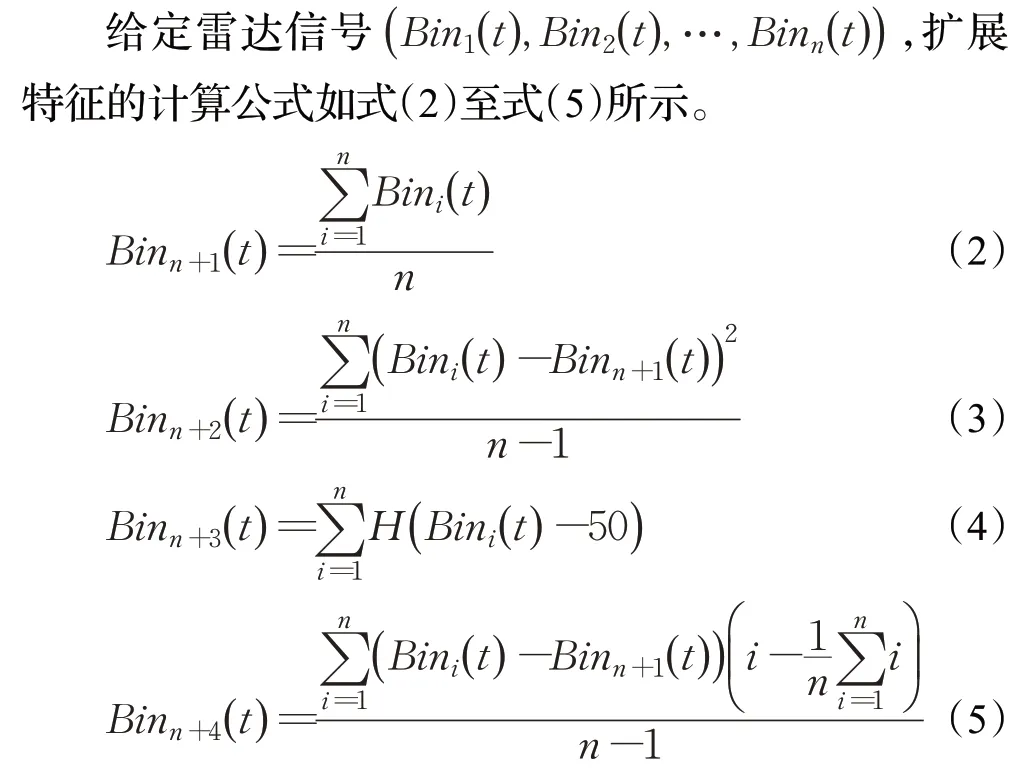
式(2)为均值,反映了雷达信号各个Bin的平均大小;式(3)为方差,反映了雷达信号各个Bin的波动大小;式(4)为大于或等于50的Bin的个数,H(~)是单位阶跃函数,在~大于或等于0时为1,小于0时为0,无物体遮挡时雷达信号各个Bin一般小于50,因此该特征反映了雷达信号的响应程度;式(5)为雷达信号各个Bin与下标序列(1,2,…,n)的协方差,其在一定程度上反映了雷达信号的变化模式[18]。
2.2 分类算法
分类算法对扩展雷达信号分类,得到停车位状态。停车位状态有四种,本文的分类算法每次在两种停车位状态中做出预测,将四种停车位状态两两配对有六种不同的组合,因此总共需要预测6次[19]。每次预测的两种可能的停车位状态如表1所示。
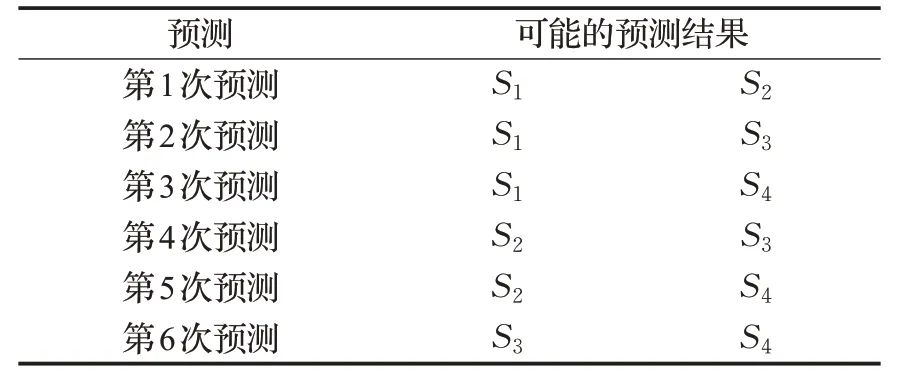
表1 每次预测的可能的预测结果Table 1 Possible outcomes of each forecast
S1、S2、S3、S4中被预测次数最多的即为分类算法所得到的停车位状态。在实际测试中出现被预测次数相同的情况少于0.5%。相同说明雷达信号特征不明显,难以分类,此时在被预测次数相同的停车位状态中随机选择一个作为输出。
具体来说,当进行第1次预测时,算法依次对每个Bin进行分类:

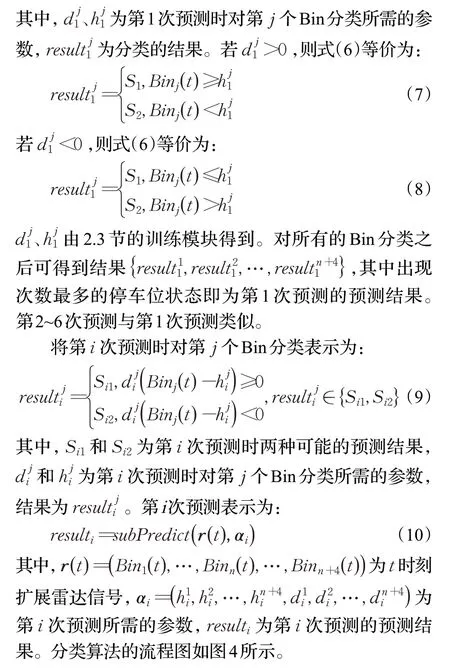
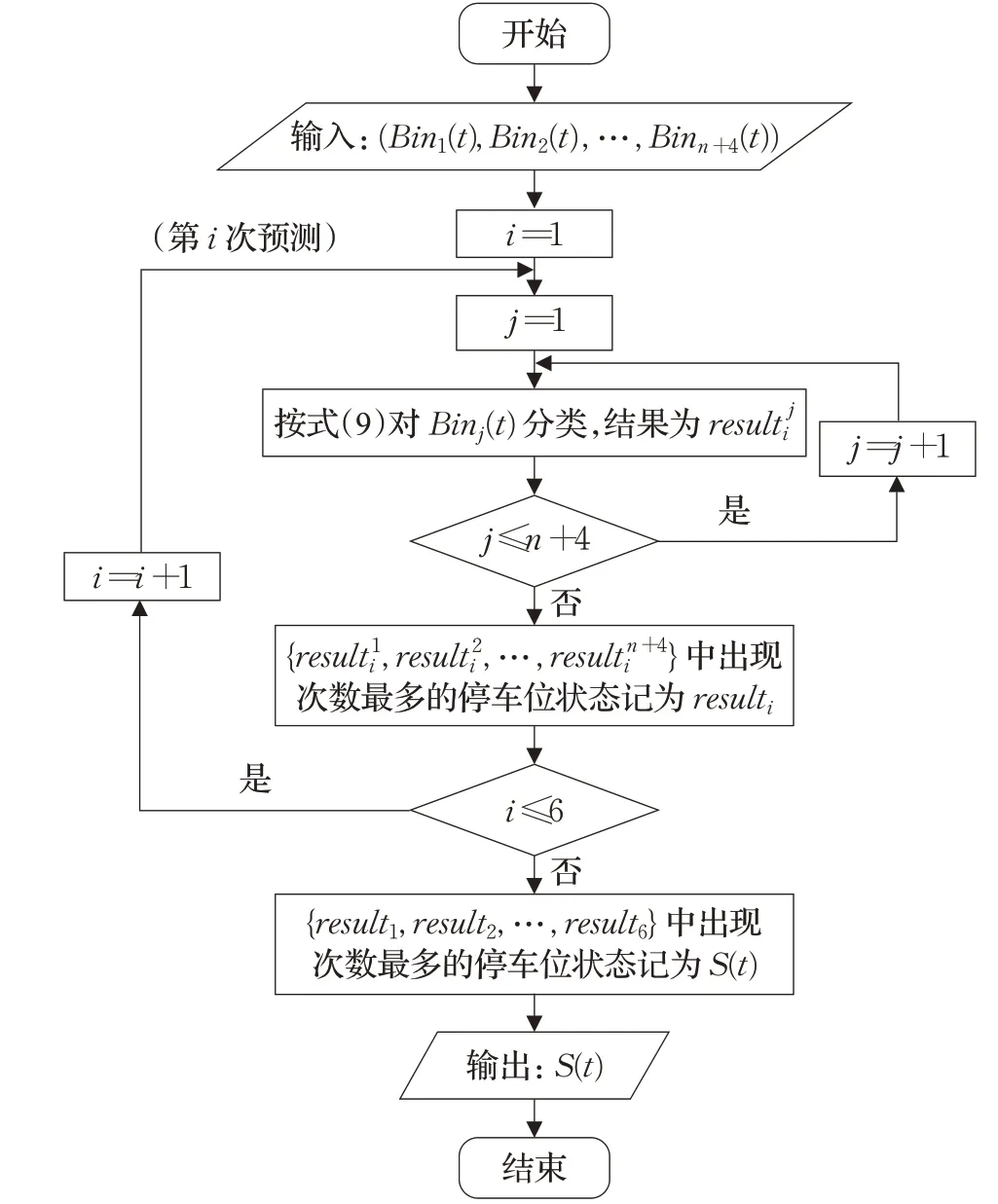
图4 分类算法流程图Fig.4 Classification algorithm flowchart
2.3 训练
训练模块的目的是根据雷达数据集计算分类算法参数。原始雷达数据集是采集的雷达信号的集合,本文为采集的雷达信号添加扩展特征和停车位状态标签。将处理后的数据集记为L,L中的样本记为(r(t),S(t)),其中r(t)为t时刻的扩展雷达信号,S(t)为t时刻的停车位状态。L中所有停车位状态为S1、S2、S3、S4的样本依次记为L S1、L S2、L S3、L S4。
第1次预测的可能结果为S1和S2,希望找到最佳的参数α1,使得第1次预测在L S1和L S2上的误差和最小,误差和记为error(α1,L S1,L S2)。寻找参数α2至α6与寻找α1类似。形式上,寻找分类算法参数的问题可表达为:
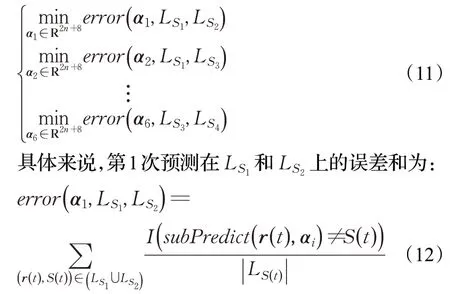
其中,L S(t)为L中所有停车位状态为S(t)的样本,函数I(~)在~为真和假时取1和0。注意,因为S1和S2的样本数不同,如果直接将第1次预测在L S1和L S2上的错误个数作为误差和,预测的结果会倾向样本数更多的停车位状态。为了消除这种偏好,当停车位状态为S()
t的样本分类错误时,误差修正为1/ ||L S()t。第2~6次预测的误差和计算与第1次类似。
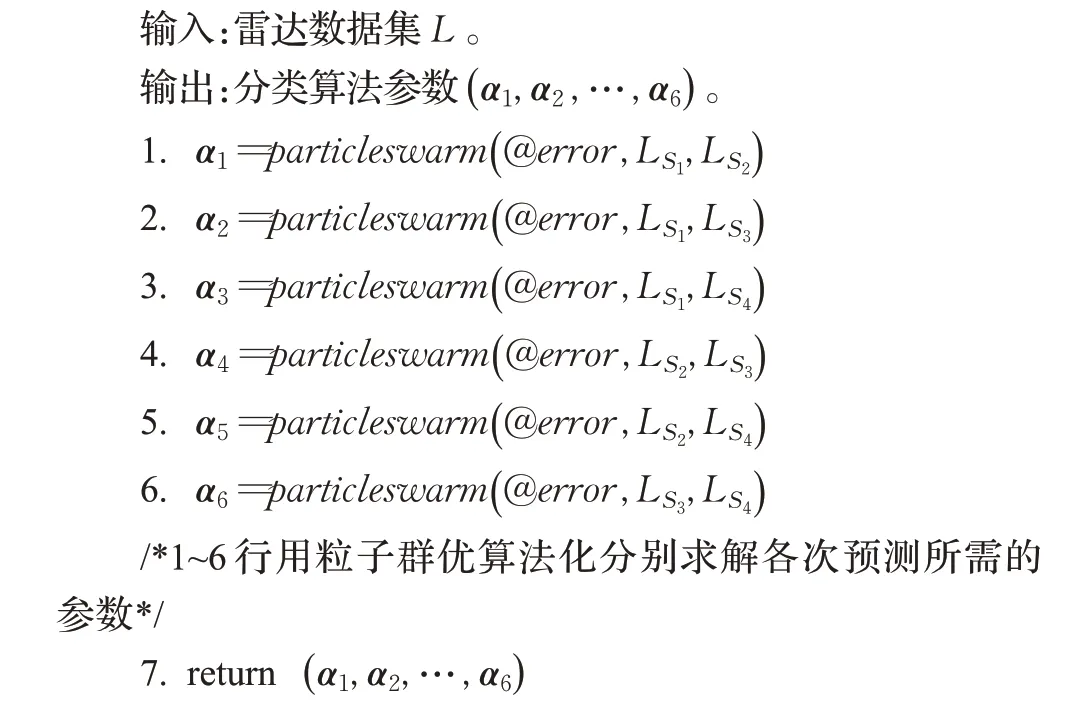
式(11)所示的优化问题的目标函数形式复杂,难以找到一个专门的算法求解。而粒子群优化算法[17]是一种群体智能优化算法,可以近似求解拥有复杂目标函数的优化问题。因此利用粒子群优化算法求解该问题,得到分类算法的参数。算法1展示了训练算法。
算法1训练
2.4 复杂度分析
添加扩展特征和分类算法的时间复杂度为O(n)。分类算法每次预测需要存储对每个Bin的分类结果,空间复杂度为O(n)。训练部分共执行6次粒子群优化算法,假设每次的粒子个数为M,迭代次数为K。每次迭代包括:(1)计算所有粒子的目标函数值,时间复杂度为O(M|L| n);(2)更新粒子,时间复杂度为O(Mn)。从而训练部分的时间复杂度为O(KM|L|n)。将添加扩展特征和分类算法作为算法的检测部分,表2列出了算法的时间复杂度和空间复杂度。
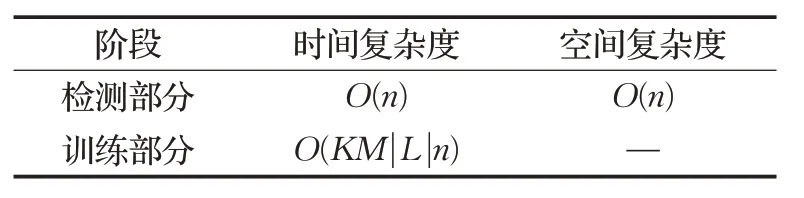
表2 算法复杂度Table 2 Algorithm complexity
3 实验与分析
3.1 实验设定
(1)采集系统与数据集
PCR雷达信号的采集系统如图5所示,由检测节点、网关节点和上位机三部分组成。检测节点放置在停车位中央,网关节点和上位机放置在检测节点附近并通过串口相连。检测节点集成了MSP430MCU、PCR雷达传感器和Lora SX1278无线通信模块,由ER14505H锂电池供电,每隔1秒采样一次,并将数据通过无线通信模块传输出去;网关节点集成了MSP430MCU和Lora SX1278无线通信模块,由ER14505H锂电池供电,其通过无线通信模块接收检测节点发送的数据,并通过串口将数据传给上位机;上位机是普通的笔记本电脑,从串口接收数据,并将其保存在本地。实验参数取值如表3所示。
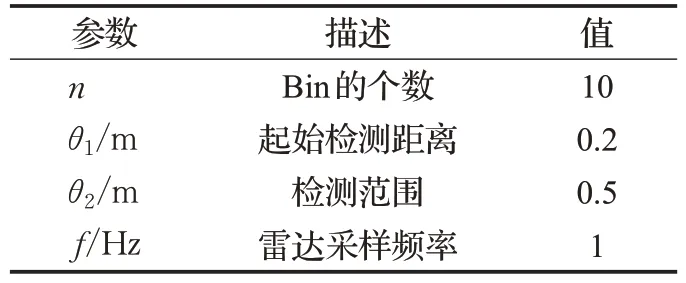
表3 实验参数Table 3 Experimental parameters
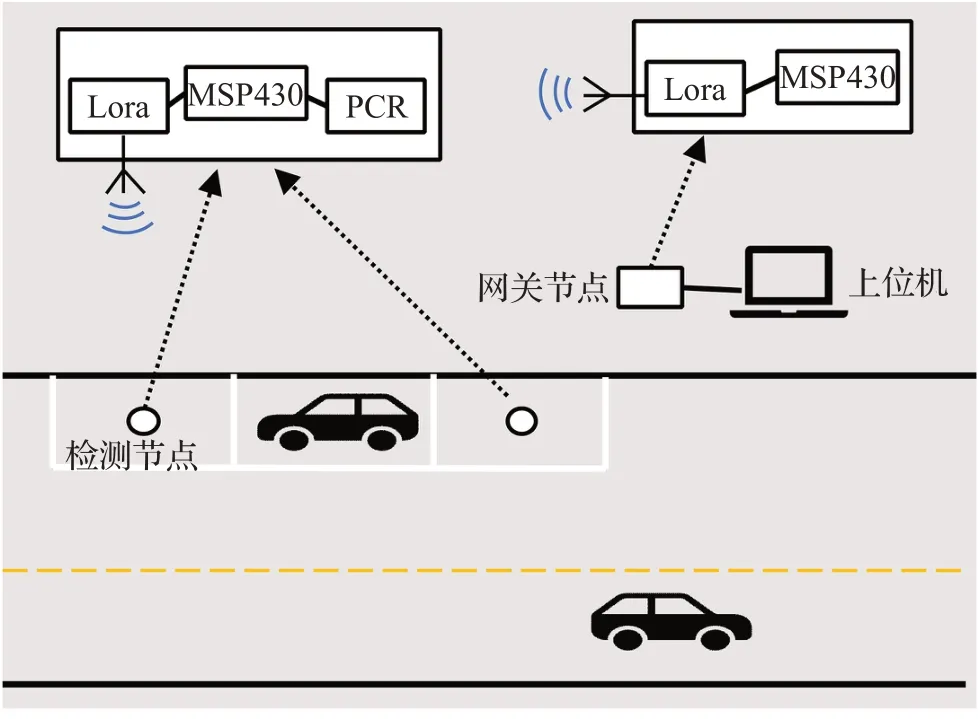
图5 采集系统示意图Fig.5 Schematic diagram of acquisition system
基于该采集系统对某部门停车位的无车无干扰、有车无干扰、无车有干扰、有车有干扰四种状态做了详细的采样。所得到的雷达数据集共有12 285条样本,四种类别的样本数依次为3 720、4 835、1 700、2 030。采集场景如图6所示。
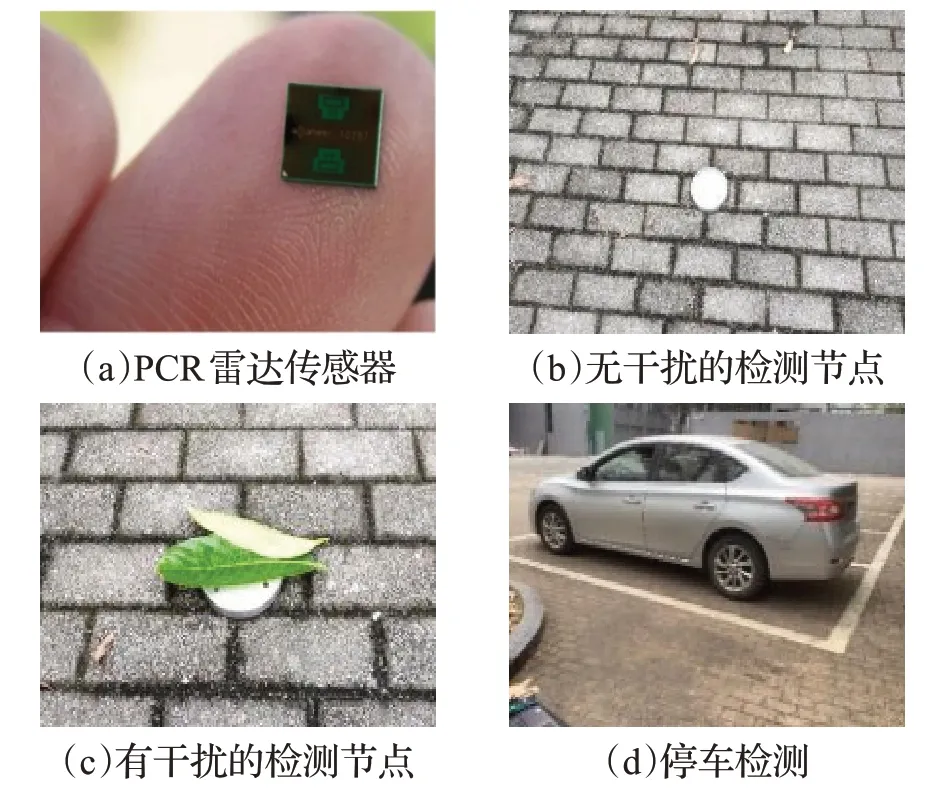
图6 雷达信号采集场景Fig.6 Scene of collecting radar signals
(2)对比算法
在MATLAB上实现了上文所述的所有算法,将本文提出的算法称为多阈值投票法(multiple threshold voting,MTV)。为了客观地验证MTV的性能以及引入扩展特征的效果,采用两种检测方法进行对比实验。
ER算法[16]:PCR雷达供应商提供的停车位检测算法。将无物体时的雷达信号作为参考信号,计算待检测的雷达信号与参考信号的差值,超出阈值则检测为有车,阈值根据经验设置。
MTV-0算法:以MTV为基础,不使用扩展特征进行停车位检测。
MTV-0和MTV需要训练过程,因此利用5折交叉验证方法[20]来验证两种算法。做法是将雷达数据集随机划分为5等份;选取其中的4份用于训练,选取余下的1份用于测试;共执行5次,每次选取不同的等份用于训练和测试,累计每次的测试结果,最后得到算法对整个雷达数据集的测试结果。
3.2 方法有效性分析
当得到停车位状态后,MTV既实现了停车检测,又检测出了雷达是否有干扰,因此评估在这两种任务上的性能。
停车检测的测试结果如表4所示。在无干扰场景下,MTV的准确率大于99.9%。在有干扰场景下,MTV的准确率为91.46%,比MTV-0高约3个百分点,这是因为MTV引入扩展特征,增加了S3和S4的差异,从而提高了在干扰场景下的检测精度。ER在干扰场景下的准确率只有71.81%,这是因为:(1)ER只利用了雷达信号与参考信号的差值这一个特征,没有发掘雷达信号更多的信息;(2)ER在无干扰和有干扰场景下使用同一个参考信号和阈值进行检测,难以同时保证两种场景下的准确率。而MTV综合雷达信号所有的Bin以及扩展特征的信息,并且进行多次预测,每次预测针对不同的停车位状态使用不同的参数,因此MTV在无干扰和有干扰场景下皆有不错的准确率。
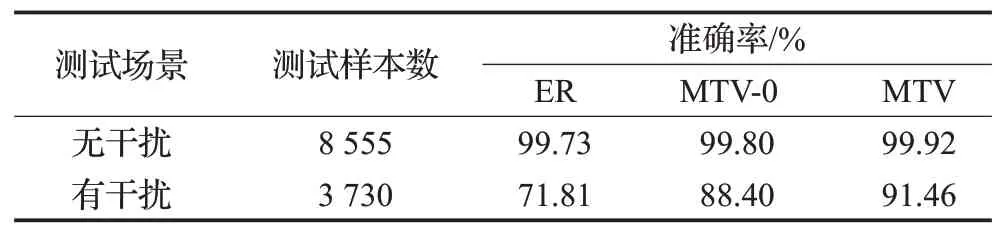
表4 检测是否有车的准确率Table 4 Accuracy of detecting whether there is a car
检测雷达是否有干扰的测试结果如表5所示。MTV的准确率为96.09%,比MTV-0高约1个百分点。而ER只考虑了“有车”和“无车”两种状态,无法检测出传感器是否受到干扰。

表5 检测是否受到干扰的准确率Table 5 Accuracy of detecting whether there is interference
图7是一段时间内无干扰的雷达信号,其中0~0.2 min、0.6~0.8 min、1.1~1.5 min为无车无干扰,0.2~0.6 min、0.8~1.1 min为有车无干扰。检测结果如图8所示。因为两种停车位状态的区别明显,三种算法都能得到正确的检测结果。
图9是一段时间内有干扰的雷达信号,其中0~0.8 min、1.7~2.5 min为无车有干扰,0.8~1.7 min、2.5~2.9 min为有车有干扰。检测结果如图10所示。在干扰场景下,ER几乎漏检了所有停车事件,MTV-0有较多的漏检和误检,而MTV只在2.6 min处漏检了一次。MTV-0和MTV都没有将停车位状态误判为S1或S2,这说明两种算法都成功地识别出传感器受到了干扰。
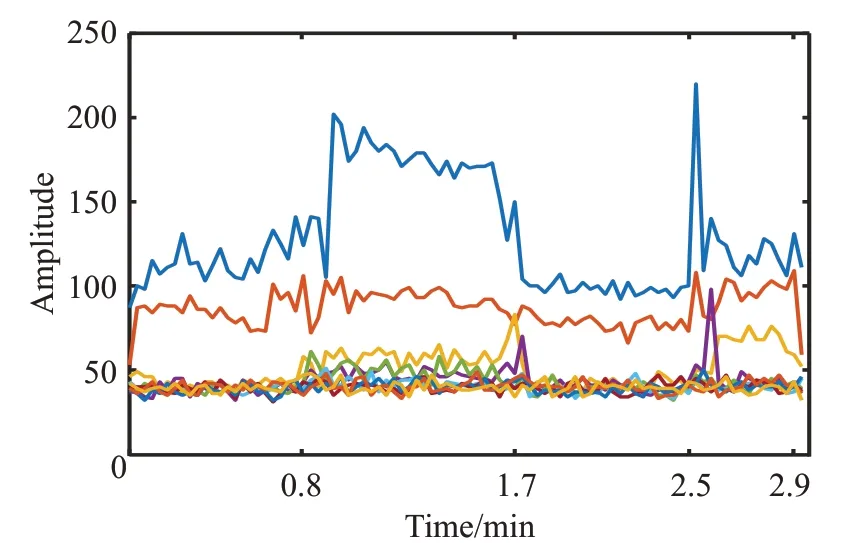
图9 有干扰雷达信号Fig.9 Radar signal with interference
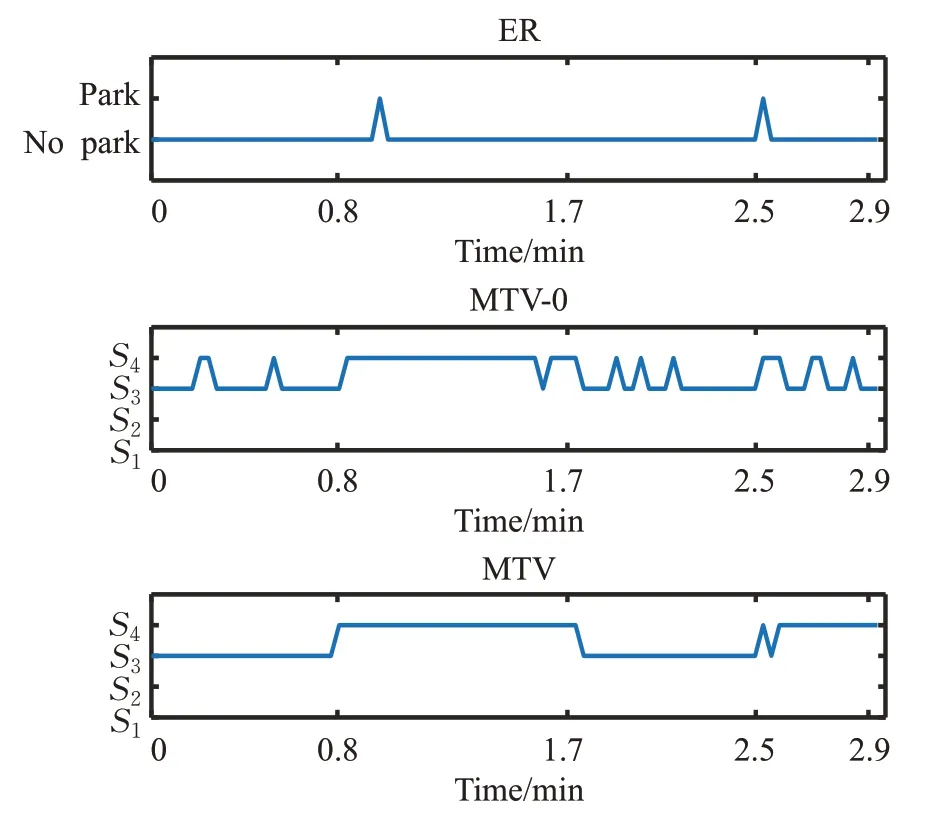
图10 有干扰时的检测结果Fig.10 Detection results with interference
含有泥土、灰尘等杂质的水不仅能很好地反射PCR发射的无线电波,而且无线电波穿过它时会产生散射。这种干扰在实际场景中是常见的,且比无杂质的水对停车检测的挑战更大。本文采集了这种干扰下的停车数据,测试了MTV在这种数据下停车检测的效果。相比无杂质的水,检测精度略微降低,可见散射对MTV停车检测的性能影响较小。
为了更全面地验证MTV检测干扰的性能,除了水和湿树叶干扰之外,本文也采集了传感器受到含有杂质的水、玻璃、泥土覆盖的数据用于测试。MTV识别这些干扰的精度依然较高,为95%左右。这些干扰对传感器的影响是类似的,这些具有较高反射率的干扰物体覆盖在检测节点上,反射了雷达发射的部分无线电波,使得雷达信号相应的Bin值产生了相似的变化。
3.3 方法运行效率分析
三种算法检测不同数量的样本所需的时间如图11所示。MTV用时虽然明显大于ER和MTV-0,但三者的速度都已满足实时性的要求。MTV与MTV-0的主要区别是MTV需要计算扩展特征,而MTV用时明显大于MTV-0,这说明MTV的时间开销主要花在扩展特征的计算上。表6列出了三种算法的检测速度。
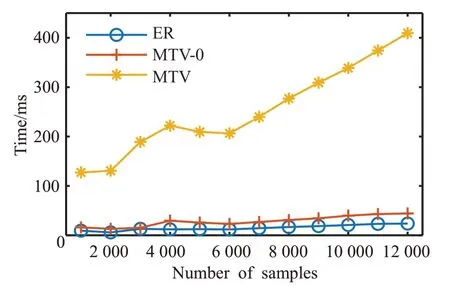
图11 算法检测效率对比图Fig.11 Detection efficiency comparison
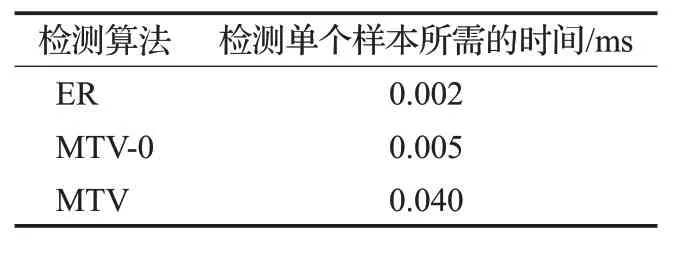
表6 检测速度Table 6 Detection speed
图12是MTV训练不同数量样本所需的时间,其中各类别的样本比例相同,粒子个数设为100,迭代次数设为50。在上述参数设定下,训练时间与样本数成线性增长,这与本文复杂度分析相符。虽然相比ER算法,MTV需要较耗时的训练过程,但在训练完毕后,MTV的检测速度可以满足实时性要求。
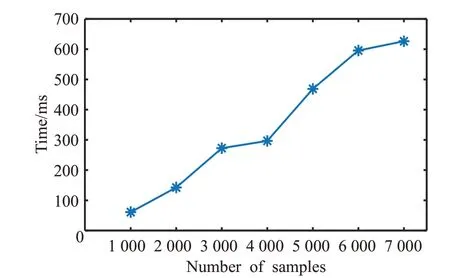
图12 MTV训练不同数量样本的时间Fig.12 MTV training time for different numbers of samples
4 结束语
本文提出了一种基于脉冲相干雷达的停车检测算法。提取雷达信号的特征,对雷达信号进行多次预测,结合多次预测的结果实现停车检测。相比已有算法,本文算法提高了干扰场景下停车检测的精度,并且可以检测雷达是否有水或湿树叶的干扰。未来工作包括:将本文算法扩展到更多干扰因素的场景;借鉴相邻多个时刻的雷达信号提高检测准确率。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
英语文摘(2020年7期)2020-09-21 03:40:56
数学小灵通(1-2年级)(2019年5期)2019-05-21 10:02:14
中国惯性技术学报(2019年6期)2019-03-04 09:50:10
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
自然资源情报(2018年7期)2018-12-28 00:52:52
遵义(2018年13期)2018-08-08 03:46:00
中央民族大学学报(自然科学版)(2017年2期)2017-06-11 07:14:54
火控雷达技术(2016年3期)2016-02-06 02:30:28
火控雷达技术(2016年3期)2016-02-06 02:30:26