一种仿生鱼深海探测机器人的机构设计
2022-05-17 03:01:44张昕辰杨康孙玉龙崔皓然姜嘉雯
机械 2022年4期
张昕辰,杨康,孙玉龙,崔皓然,姜嘉雯
一种仿生鱼深海探测机器人的机构设计
张昕辰,杨康*,孙玉龙,崔皓然,姜嘉雯
(佳木斯大学 机械工程学院,黑龙江 佳木斯 154007)
为了使机器鱼能够潜入更深的海洋,设计了一种仿生鱼深海探测机器人的机械结构,首次提出了“多室水肺”这一概念。基于参考现有的鱼类模型受力等实验的研究成果以及机械原理的设计指导,通过对鱼的运动方式以及各部位作用的分析,从构件层次上提出了一种新的机器鱼骨架、背鳍、胸鳍、尾鳍以及内腔的机械结构,阐述了这些机械结构更加优化的原因以及其运行方式。同时根据现有的研究成果对材料选用、控制方式以及电子器件的放置提出了见解。
深海探测;机械机构;仿生鱼
为了更深入的了解地球、保护海洋、合理地采集深海资源,形成可持续发展,探寻深海非常重要,深海探测装置必不可少。仿生鱼海洋探测机器人在深海探测方面起到了重要的作用,它可以完成收集图片影像、海水和海底土壤的元素含量、温度、水流波动速度数据、观察深海生态等海洋任务。国内外学者在鱼类推进机理研究和仿生机器鱼研制方面都也取得了一定的成果,梁准等[1]发明出一种二自由度胸鳍仿生鱼,如图1所示。其采用一体化硅胶膜,防水性能强大并且实现了类似鲹科鱼的尾部摆动和鱼体波动。李国瑞等[2]成功设计并制造出一种自能源软体机器仿生鱼,该仿生鱼能够实现潜入万米深海并且自主游动,如图2所示。它身长22 cm、展翅28 cm,已经在马里亚纳海沟完成了深浅实验。Caleb Christiansion等[3]从透明的鳗鱼幼体细头鳗身上获得灵感,研发出一种由无框流体电极介电弹性体致动器驱动的半透明软机器人,图3为引入荧光染料的机器体。Berlinger等[4]从鱼群中获得灵感,设计出了不依赖于集中的、水上的、明确的通信,而是通过对附近邻居的视觉观察做出行动的鱼群机器人。这种模仿鱼群的能力,成为了机器鱼融入鱼群的关键,能够更方便的进行伪装、监察、探测等。不依赖路上通信,能让它完成更复杂的深海任务。
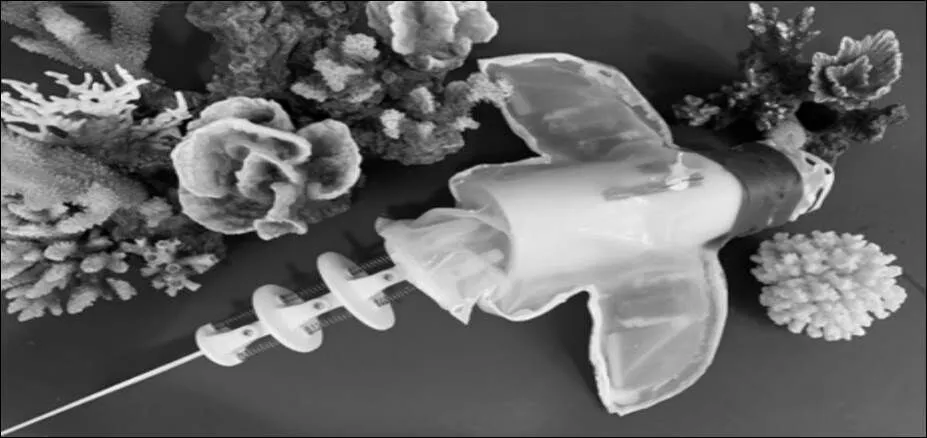
图1 二自由度胸鳍仿生鱼
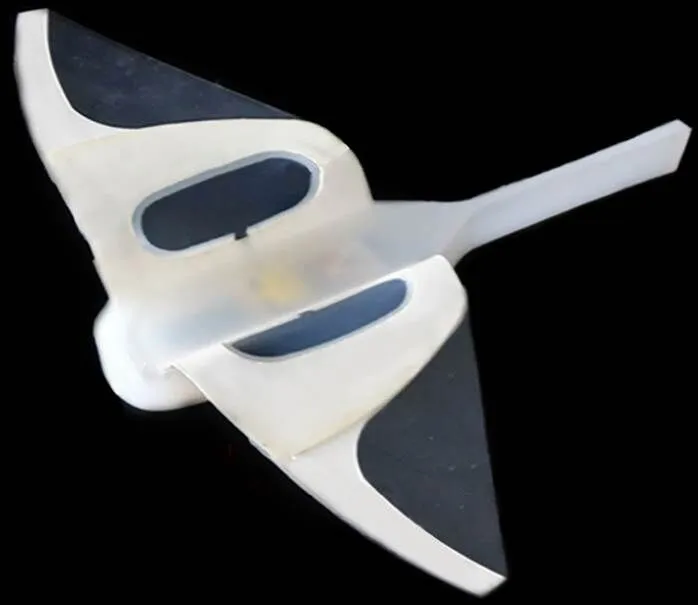
图2 自能源软体仿生鱼

图3 引入荧光染料的软体深潜机器人
目前现有的深海探测设备已经能够潜入万米深海并自主游动,但其在深海中的运行仍存在着动力不够大、游动速度较低、可转向角度小以及载重较小的不足之处,所以,本文设计了一种仿生鱼深海探测机器人的机构设计,使得仿生鱼深海探测机器人能够潜入更深的海洋、具有更快的游速和上浮速度、能够更快地完成转向动作以及具有更大的载重。
本仿生鱼深海探测机器人能够独自完成一些简单的探测工作,也可以辅助载人深潜器进行深海科学探测、调查深海金属矿产和海底生态等工作。
1 机构设计
本文提出一种柔性体摆尾喷射式组合动力仿生鱼,旨在能够利用更加优化的机构使得仿生鱼海底探测机器人能够潜入更深的海底完成作业。
1.1 主骨
主骨目的在于带动鱼身和尾鳍进行水平摆动,通过排水来产生本仿生鱼前进、转向的动力。
主骨机构如图4所示,由多个球销副构成,一般取球销副数目=5。球销副不宜数目过多,否则会导致运动的不确定性增加以及抗干扰能力的下降。球销副的实际数目需要根据鱼体具体的摆动范围、所要求的摆动精度以及球销副的转动范围来确定。

图4 球销副主骨机构

而主骨总转动角度的最大值就决定了鱼身的摆动范围。
由于球销副为IV级副,其自由度为2,多个球销副组合就会造成主骨自由度过多、运动不可控的问题。为使鱼的摆动可控,在球销副上增加多个销孔,当球销副在电动机的作用下转动到所需位置时,控制系统会解开销锁定,同时控制电动机制动,此时销弹出,插入销孔。这样,就能够通过控制销,实现在一定范围内控制鱼体摆动角度的目的。
机构示意图机构示意总图如图5、图6所示。主骨机构在整机中的位置如图5中4所示。

图5 机构示意主视图
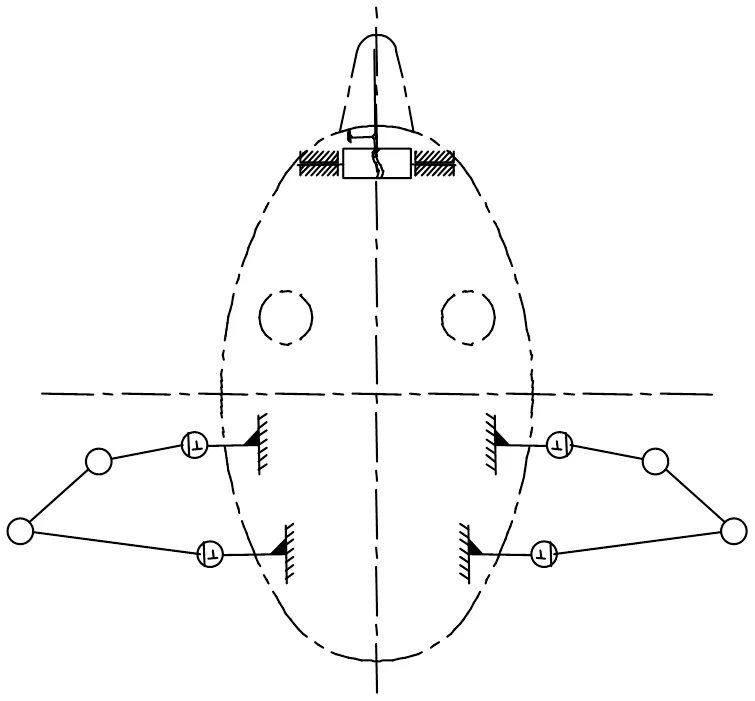
图6 机构示意侧视图
1.2 抹香鲸仿生:腮和肺
根据仿生原理:抹香鲸游速一般为5.56~9.26 km/h,受惊时可达18.52~22.22 km/h[5]。抹香鲸的最大潜水深度可达3000 m以上,是动物王国当之无愧的“潜水冠军”。抹香鲸能成为“海洋霸主”的原因之一是它具有强大的呼吸系统,其右鼻孔的通道类似于一个空气储藏室,这样抹香鲸就相当于拥有了两个肺。
鉴于抹香鲸强大的深潜功能,本文提出“多室水肺”的概念。通过对抹香鲸的仿生,在本深海探测机器鱼内部设置了多个空腔,这些空腔主要有:在鱼体中部的一个较大的空腔,称之为“肺”,如图5中2所示,它与接下来所述小空腔都连通并且设置有一个空气产生装置,如图5中5所示。在头的上部和下部、近尾部都分别有一个较小的空腔,它们都与“肺”连通但不互相连通。这些空腔与“肺”的连接处设有由芯片控制的开关,可以将空腔与“肺”完全隔绝,形成独立的空腔。这些较小的空腔各连接一个双向变量液压泵和气体产生装置,当传感器检测压强在可承受范围外时,控制系统不会启动液压泵,只是控制液压泵的开合,根据实际情况控制气体的产生和排放。在压强承受范围内,当需要快速上浮或者动力不足需要使机器鱼浮出水面时,芯片发出指令控制气体产生,此时打开如图5中5所示空气产生装置的阀门,将腔内海水排出,使得气体充满“肺”
以及各个小空腔,这样机器鱼能够获得很大的浮力,浮出水面。同理,当需要下潜时,下侧液压泵向腔内泵入海水,腔内气体从图5中3所示的排水/放气阀和1所示的上侧液压泵排出,使海水充满内腔,鱼体下潜。
深海的压强极大,1000 m深海压强约为103 kg/cm²。在外界压强极大的情况下,“肺”中不能存有空气,否则会被巨大的压强立即压扁。
当外界压强足够大时,芯片会控制液压泵启动,泵入海水并将气体排出,这样,即使在深海,也不会被巨大的压强压扁,仍然能够潜入更深的海洋进行探测工作。在深海时,控制芯片基于算法和接收到的讯息控制液压泵的运转,通过液压泵向外排水可以获得前进的动力,与鱼体摆动排水产生的动力组合,使得机器鱼获得更大的动力,同时,液压泵排水也能够完成纠正鱼体行进方向的任务,令仿生鱼在深海的运动更为精确。
上述液压泵即代替了鱼类腮的部分作用,主要作用是排气、排水和吸水,使得本机器鱼可以完成预定任务。
1.3 鱼鳍
鱼体各鳍都为鱼能够在水中运动自如产生了不可替代的作用,通过对各种鱼鳍的仿生,使本仿生鱼深海探测机器人可以如同鱼儿一样,在水中自如运动。根据下述鱼类的尾鳍、胸鳍、背鳍的仿生原理,为仿生鱼设计出属于自己的鱼鳍。
根据李芝旭[6]利用局部麻醉法来观察鱼鳍作用的结论了解到:
尾鳍:如同船“舵”,能够调节鱼在水中游动时的方向,随鱼体左右摆动从而排水,产生鱼儿前进的主要动力,同时还可以保持身体平衡稳定。尾鳍位于鱼体尾端,对于大多数鱼来说,相比于其它鱼鳍更大。
胸鳍:胸鳍类似于“船桨”,用来维持鱼儿身体的平衡、也能改变运动的方向、控制鱼体前进和减速。形态及运动:位于鱼鳃鳃孔后侧,当尾鳍不运动时,胸鳍向鱼体俩侧张开,在做前后摆动时,鱼体前进;一侧胸鳍摆动时,鱼体改变方向。
背鳍:作用是参与调节鱼体在水中垂直方向上的平衡、在快速游动时改变方向。在一些鱼类中,可以起提供动力的作用。形态及运动:垂直波浪,维持鱼体直立。可左右摆动幅度小。
利用上述结论进行相应的设计。
(1)尾鳍
尾鳍连接于主骨上,其机构示意图如图7所示:、、形成虚约束,尾部支撑杆7、8在点固定,联结成尾鳍的形状。尾鳍随主骨的摆动而摆动,同时摇杆3、4、5的摆动使得尾鳍本身也可以在一定范围内摆动。轴表示不在同一平面内
苏柏泉等[7]指出:尾鳍连杆机构的结构尺寸和摆角之间的关系:相位差调节范围一般在60°~100°之间。
尾鳍分为上下两鳍,在其接缝处有契合槽,能将上下两鳍紧紧固连在一起,尾鳍使用刚性材料,边缘处使用柔性材料。
(2)胸鳍
设计胸鳍,目的是为了使鱼体能够转弯和保持平衡。胸鳍横于鱼体两侧,能够上下摆动从而控制平衡,其机构示意图如图8所示。
本胸鳍机构中,以摇杆4为主动件,当摇杆2和连杆3共线时,机构的传动角为0°,此时的位置是死点。两个球销副和主骨机构中介绍的球销副原理相同,能够控制卡死和进行胸鳍竖直位置的微调。当需要胸鳍工作时,芯片会控制销弹出卡死,此时的形状就是鱼的胸鳍状,这样的设计使胸鳍的摆动能够更加稳定、可靠。
转弯时,主骨上每一个球销副的转动角度叠加在一起,再加上尾鳍的自主摆动角度,就是鱼体的摆动角度。此时鱼体偏离其中心弯曲于鱼体一侧,通过控制另一边胸鳍的拍动提供转动方向的力,从而实现鱼体转弯的动作。

1.机架;2.连杆;3~5.摇杆;6.连杆;7、8.尾部支撑杆(可手动调整角度);A、B、C、D为转动副。

1.机架;2、4.摇杆;3.连杆;B、C.转动副;A、D.球销副。
而在鱼体游动时,胸鳍通过上下调整、略微倾斜来改变鱼体对于水流的受力面积,两侧胸鳍各自控制,鱼体会因两侧受力不同从而改变其偏斜角度,令鱼体恢复、保持平衡状态。
胸鳍采用柔性材料,刚性构件在其内部支撑,根据张纪华等[8]对胸鳍的实验结果:胸鳍模型的尖端薄壁区域发生了比较严重的不规则被动变形,由此,胸鳍使用柔性材料,让这种变形的影响不至于破坏鱼体以及影响机器鱼的工作。
(3)背鳍
设计背鳍的目的是维持潜水状态时机构的平衡,其机构单元体的机构示意图如图9所示。

1.机架;2.圆柱凸轮;3.摇杆;A、C、D.转动副;B.移动副。
在仿生鱼背鳍处,有多个背鳍机构单元体依照背鳍形状排列,每一个都能单独进行控制。
背鳍采用柔性材料,能够随意弯曲和在一定范围内扩张。当鱼体为平衡状态时,背鳍静止不动;当鱼体在水中游动,产生力的不平衡时,就会导致鱼体的不平衡,此时,通过对传感器传回的数据进行分析,控制系统根据分析结果控制各个背鳍单元体左右摆动,由于各个单元体摆动的方向、角度不同[9],就会使得背鳍变成波纹状,各个单元体不断变换角度就会令柔性背鳍产生波动,波动产生的水的推力与阻力平衡,从而能够更加精确地实时控制鱼体的平衡。当游动速度加快时,背鳍的波动频率也要升高,这是由于游速加快时所受到的阻力也会变大,所以必须以较高的波动频率产生较大的水动力与阻力形成平衡状态。
2 外壳与潜海深度
2.1 外壳
仿形原理:抹香鲸具有很厚的皮下脂肪层。脂肪是热的不良导体,导热性比水低得多。鲸的皮下脂肪就相当于一层天然的绝热屏障。在鲸类中,抹香鲸皮下脂肪的平均厚为13~18 cm。皮下脂肪越厚,隔热性能就越强。
软体机器人与刚性机器人最本质的区别就在于其躯体材料的使用上,软体机器人使用软弹性材料,能够获得较好的灵活性和适应性[10]。本设计中的仿生鱼深海探测机器人采用流线型设计,头部以及各个构件采用刚性材料,而鱼身采用软体材料,能够增强本机器鱼的灵活性,使得它能够在水中自由地变换角度。
为了保护仿生鱼中的电子器件免受高压的侵害,将这些电子器件分开排列,使得每个部分所占空间很小,并将这些电子器件嵌入到软体材料中,由李国瑞等[2]的测试和模拟表明,上述方法能够减小压力下组件之间界面处的应力,能够更有效的保护机器鱼中的电子器件不受损伤,并且这样的排列也更加便宜实用,能够减少经济成本。
2.2 潜海深度
本机构设计旨在增大仿生鱼的探海深度,从理论上讲,因为可以将内部空气排净,所以在不受续航时间、信号范围等条件制约的情况下,能够潜入尽可能深的海洋。
由于可以通过控制装置实现自动探测、返航,可以不受信号范围约束,所以实际潜水深度主要受续航能力的制约。而产生气体上浮、排气下沉的方式也能节省能源的消耗,增强续航能力。由于本文只提供机构设计,未进行实物模型的制造以及模拟实验,所以其实际潜海深度本文不做详细讨论。
3 总结
本文通过对几种鱼类的仿生,提出了一种仿生鱼深海探测机器人的机构设计:主要对本深海探测仿生鱼体的骨架机构、胸鳍机构、背鳍机构和尾鳍机构进行了基于仿生原理的设计。
对于外壳材料,结合张纪华等[8]、郝天泽等[10]的研究结果进行参考并仿生。
首次提出“多室水肺”的概念,在使深海探测装置能够潜入更深的海洋进行探索、检测的同时也增强了机器鱼的性能、降低了深潜时的能耗,为新一代深海探测装置的设计制造提供了参考。
[1]梁准,张子扬,林子雄,等. 一种双自由度胸鳍仿生机器鱼[J].兵工自动化,2020,39(11):82-86.
[2]Li G R,Chen X P,Zhou F H,et al.Self-powered soft robot in the Mariana Trench[J]. Nature,2021,591(7848):66-84
[3]Nathaniel N. Goldberg,Dimitri D. Deheyn,Shengqiang Cai,et al. Translucent soft robots driven by frameless fluid electrode dielectric elastomer actuators[J]. Science Robotics,2018,3(17). DOI:10.1126/scirobotics.aat1893.
[4]Berlinger Florian,Gauci Melvin,Nagpal Radhika. Implicit coordination for 3D underwater collective behaviors in a fish-inspired robot swarm[J]. Science robotics,2021,6(50). DOI:10.1126/scirobotics.abd8668.
[5]刘军,赵新生,刘政. 探秘抹香鲸[J]. 大自然,2012(3):66-69.
[6]李芝旭. 用局部麻醉法观察鱼鳍的作用[J]. 生物学通报,2003(1):25.
[7]苏柏泉,王田苗,梁建宏,等. 仿生鱼尾鳍推进并联机构设计[J]. 机械工程学报,2009,45(2):88-93.
[8]张纪华,刘乐华,杨晓光,等. 水下仿生柔性胸鳍摆动水动力特性试验研究[J]. 船舶力学,2021,25(4):406-415.
[9]蒋小勤,杜德锋,彭钧. 长背鳍扭波推进活鱼实验研究[J]. 海军工程大学学报,2010,22(3):1-6.
[10]郝天泽,肖华平,刘书海,等. 集成化智能软体机器人研究进展[J]. 浙江大学学报(工学版),2021,55(2):229-243.
Mechanical Structure of Bionic Fish Deep-Sea Detection Robot
ZHANG Xinchen,YANG Kang,SUN Yulong,CUI Haoran,JIANG Jiawen
( School of Mechanical Engineering,Jiamusi University, Jiamusi 154007, China)
In order to make the robot fish dive into the deeper ocean, the mechanical structure of a bionic fish deep-sea exploration robot is designed, and the concept of "multiple lungs" is put forward for the first time. Based on the research results of existing fish model stress experiments and the design guidance of mechanical principles, a new mechanical structure of the skeleton, dorsal fin, pectoral fin, caudal fin and inner cavity of robot fish is put forward from the component level by analyzing the movement mode of fish and the functions of each part, and the reasons for these mechanical structures being more optimized and their operation modes are expounded. At the same time, according to the existing research results, some opinions are presented on material selection, control methods and the placement of electronic devices.
deep sea exploration;mechanical mechanism;bionic fish
TP242
A
10.3969/j.issn.1006-0316.2022.04.012
1006-0316 (2022) 04-0068-06
2021-11-01
张昕辰(2000-),男,山西介休人,主要研究方向为深海探测机械及其应用,E-mail:2769773756@qq.com。*通讯作者:杨康(1972-),女,湖南长沙人,硕士,副教授,主要研究方向为自动控制与检测技术,E-mail:332108924@qq.com。
猜你喜欢
水下无人系统学报(2024年1期)2024-03-14 03:42:28
苏州科技大学学报(工程技术版)(2023年3期)2023-11-02 08:27:58
包装工程(2023年18期)2023-09-27 09:18:38
南方农业学报(2020年7期)2020-11-09 03:09:31
孩子(2020年10期)2020-10-21 09:24:43
淡水渔业(2019年3期)2019-05-21 08:58:56
养生保健指南(2017年8期)2017-12-09 18:45:31
船舶力学(2017年5期)2017-06-05 14:14:11
科学Fans(2017年3期)2017-04-13 07:32:13
作文世界(小学版)(2016年12期)2017-04-10 00:39:03