
液压支架电气控制系统的试验与应用
2022-05-14 02:49王建平
机械管理开发 2022年3期
王建平
(寿阳开元矿业有限责任公司机电运输部,山西 寿阳 045400)
引言
液压支架、采煤机、刮板输送机为综采工作面的“三机”,其担负着煤矿的主要生产任务。尤其是大功率、多功能采煤机在工作面的应用,对其配套刮板输送机、液压支架等大型设备的自动化、智能化水平和可靠性提出了更高的要求。液压支架作为工作面安全支护的主要设备,其根据生产任务对支护高度进行控制;同时,为刮板输送机提供推溜动力。端头控制器是实现对液压支架的远程控制,并最终实现工作面自动化生产的基础[1]。本文重点对液压支架电气控制系统进行试验与应用研究。
1 液压支架端头控制器集中控制设计
液压支架电气控制系统主要由防爆计算机、端头控制器、各架间的控制器组成。其中,防爆计算机主要用于接收液压支架运行状态参数,并对参数进行记录和存储。端头控制器主要功能是对现场液压支架的实际工作参数和工作面其他设备的工作状态发出相对应的控制指令,同时向防爆计算机发送预警信号和故障信息,其是实现远程监测控制的核心器件[2]。架间控制器是具体控制某组液压支架的直接控制装置;同时架间控制器还装备了位移、压力等传感器对液压支架支柱压力、推溜位移等参数进行采集,为端头液压支架提出控制指令奠定基础。液压支架一体化电气控制系统组成如图1 所示。
由图1 可知,端头控制器是实现液压支架集中、一体化控制的核心,起着承上启下的作用,主要承担发送控制指令、接收设备运行参数、向防爆计算机上传运行参数的功能。
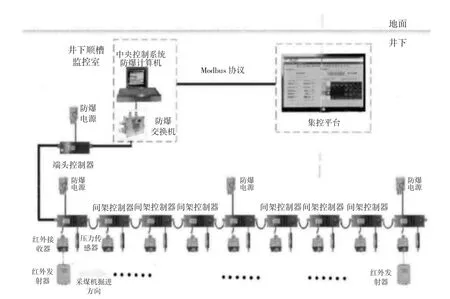
图1 液压支架电气控制系统组成图
1.1 端头控制器巡检功能的实现
端头控制器巡检功能指的是能够对现场各类传感器所采集的数据进行接收,其是实现集中、一体化控制和在线监测的基础。端头控制器在现场传感器采集数据支撑作用下,结合工况和实际运行参数对架间控制器发出控制指令;将控制指令和实时运行参数上传至上位机供用户直观查看[3]。端头控制器巡检流程如下:从当前液压支架的状态参数判断采煤机的位置,为集中控制奠定坚实的基础;以采煤机为中心,对其前后15 架的状态进行巡检。
巡检参数包括整体参数、局部参数、成组参数和端头自动化参数。其中,整体参数主要包括移架、降柱、升柱、推溜的最长时间及推溜安全间距、移架压力等;局部参数主要包括最小升架压力、顶梁伸缩时间、极限压力、移架压力等;成组参数主要包括小循环参数、成组推溜参数、成组移架参数等;端头自动化参数主要包括上下端头的开启与否、上下端头反向开关与否等。端头液压支架巡检流程设计如下页图2 所示。

图2 液压支架巡检流程
1.2 端头控制器集中控制功能的实现
端头控制器集中控制功能是根据采煤机的实时位置并结合工艺要求对液压支架的各项动作发出指令。对于综采工艺而言,主要包括中间区段、斜切进刀、截割三角煤及返回中间段。其中,以斜切进刀和截割三角煤对应的工艺流程比中间区段和返回中间段的工艺流程复杂[4]。因此,实现对采煤机在斜切进刀和截割三角煤工艺时对液压支架的精准、实时控制尤为重要。端头控制器集中控制功能实现流程如图3 所示。

图3 端头控制器集中控制功能流程设计
2 液压支架电气控制系统的试验与应用
在对液压支架电气控制系统软硬件(包括端头控制器硬件、键盘显示程序、远程手动控制程序、集中控制追机拉架程序、故障报警、急停功能、错误状态显示功能等)调试成功的基础上,对液压支架电气控制系统的性能进行试验。
2.1 液压支架电气控制系统性能试验
重点对液压支架电气控制系统的基本功能组成检查试验、工作稳定性进行试验。按照如图4 所示的方式对被试组件进行连接,重点对单台小循环、成组、煤机联动控制功能进行试验。经试验后得出如下结论:
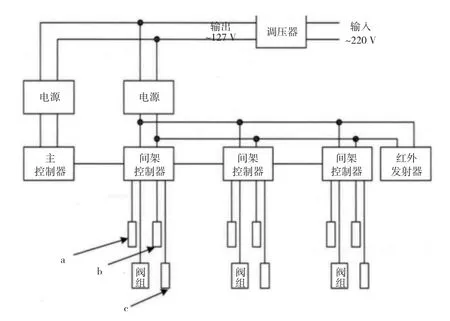
图4 受试系统连接图
1)小循环功能试验结论:选择左右各一台液压支架为被控液压支架,操作者按下“小循环”操作键后,相邻液压支架能够按照指定动作运行,包括降架、移架、升降等;选择左右各7 台液压支架为成组动作液压支架,操作者按下“小循环”键后,成组液压支架均能够按照指定指令动作。
2)电气控制系统工作稳定性试验结论:系统在连续长时间运行后输出电压始终为额定值;系统连续长时间运行后始终能够保证稳定输出状态。
2.2 液压支架电气控制系统地面试验
液压支架电气控制系统地面试验主要对其远程手动控制功能进行试验。该项试验主要是对液压支架执行指令动作的所需时间和反应速度进行试验,在现场试验后得出如下结论:
1)试验人员按下“动作键”后,对应被控制的液压支架会实时动作,即具有较好的实时性,可满足实际生产需求[5]。同时,在反复试验过程中能够稳定、实时执行指令,并未出现误动作或不响应的情况。
2)根据现场工况,设定端口控制器执行每个指令的时间不超过5 s。经反复试验后,液压支架动作执行时间均不超过5 s,即动作速度满足要求。
2.3 液压支架电气控制系统的应用
为验证所设计液压支架电气控制系统在现场的应用效果,将其应用于实际工作面中,该工作面走向长度为200 mm,并为其配置了122 个液压支架,现场液压支架安装如图5 所示。

图5 液压支架现场应用
经实践应用并总结如下:在应用生产的一个周期内,液压支架电气控制系统能够稳定通信,能够根据采煤机实时位置等工况对各项动作进行实时、精准控制,并在故障发生前能够实现急停、闭锁的控制功能;同时,电气控制系统还能够将液压支架运行参数及控制指令实时上传于上位机,实现了远程、集中控制。
3 结论
液压支架为综采工作面的主要支护设备,其与采煤机、刮板输送机一起称为工作面的“三机”,为进一步提升综采工作面生产安全性和效率,提升液压支架电气控制系统的性能尤为重要。本文所设计的液压支架电气控制系统能够实现对设备集中、一体化、远程控制。通过试验表明:电气控制系统的性能优越、稳定性良好,系统动作速度满足不超过5 s 的要求;并经实践工作面验证其在恶劣环境下也可正常通信、稳定及时控制。
猜你喜欢
理化检验(物理分册)(2022年10期)2022-11-22
防爆电机(2022年1期)2022-02-16
河北画报(2021年2期)2021-05-25
文萃报·周五版(2020年29期)2020-10-20
探索科学(学术版)(2020年5期)2020-07-12
煤矿机电(2019年6期)2020-01-13
汽车与安全(2020年10期)2020-01-06
电子技术与软件工程(2019年15期)2019-12-03
山东工业技术(2016年24期)2017-01-12
