盛瑞八速自动变速器动力传递推断分析
2022-05-13 02:26冮地王静
时代汽车 2022年10期
冮地 王静
摘 要:对于行星齿轮式自动变速器而言,档位变速过程较为复杂。本文对盛瑞八速自动变速器(SR8AT-300)的各档位动力传递过程进行分析,希望籍此能够对自动变速器的动力传递过程认知以及推断分析方式的推广做出作出一些贡献。
关键词:盛瑞8AT SR8AT-300 行星齿轮 动力传递 推断分析
Abstract:For planetary gear automatic transmission, the transmission process of each gear is more complex. This paper analyzes the power transmission process of each gear of Shengrui eight speed automatic transmission (SR8AT-300), hoping to make some contributions to the cognition of the power transmission process and the promotion of inference analysis method.
Key words:Shengrui 8AT, SR8AT-300, planetary gear, power transmission, inference analysis
1 引言
盛瑞传动是国内最早自主研发AT变速箱的企业,通过国际合作,很早就推出了拥有自主知识产权的8AT变速箱,具体型号为SR8AT-300。经过第二代与第三代的改良,由于其尺寸小、成本低的特点,正在愈发受到青睐。
2 动力传递结构的基本分析
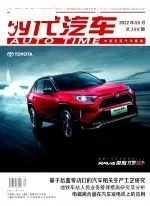
该变速结构沿输入至输出方向共分为四个行星排,所有行星排均为单级行星排,如图1所示。
较为特别的结构属于第三与第四行星排共用齿圈的结构形式,根据第三排太阳轮与第四排太阳轮的大小关系差别,第三排太阳轮更小导致了第三排行星架当量齿数更多,所以当第三与第四行星排同为“架带圈”的超速情况下第四行星排的↑0速度更快,记作4↑0(↑即为超速,右下角标0指非复合速度,左上角标4特指第四行星排),第三排的3↑0(左上角标3特指第四行星排)的速度略低。同理在“圈带架”的减速情况下第三排的3↓0(↓即为减速)的速度略快,第四排的4↓0的速度略低。
3 动力传递分析过程
各档位对应的执行元件数目为2,将所有组合形式列出,并依次进行速度分析:
①C1C2
C1和C2的工作可将速度1(输入轴速度为不变速状态,直接记为1)传递至第三排行星架和太阳轮。这样第三排两点约束为1,则第三点齿圈速度也为1,可直接输出。
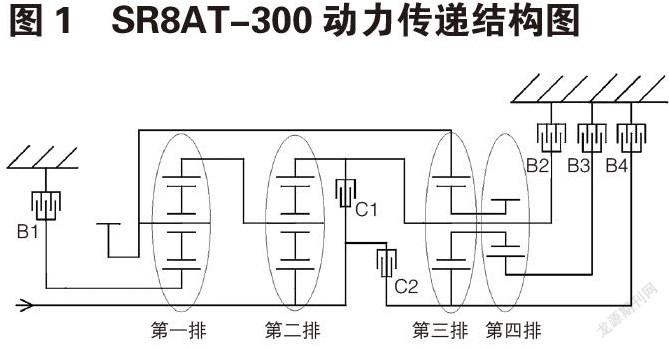
②C1B1
C1将输入轴的速度1传递至第二排,并使第二排的三元件以及第一排齿圈锁定为一体,速度均为1。另有B1固定了第一排太阳轮,所以在第一排中产生了齿圈主动、太阳轮固定的约束情况,即第一排行星架速度为↓0,可直接输出,如图2所示。
③C1B2
C1和B2的工作会将两个不同的约束传递至第三排行星架,这会导致约束冲突,所以当前组合无效。
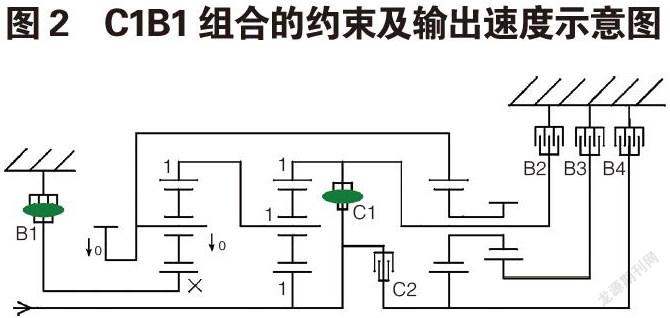
④C1B3
C1的工作将输入轴速度1传递至第四排行星架,B3可固定第四排太阳轮。这样在第四排中可以实现行星架主动、太阳轮固定的约束情况,所以第四排的齿圈可生成↑0的速度并能直接输出。但该速度是由第四排实现的,为区别于第三排所生成的相同速度,可简记为4↑0,如图3所示。
⑤C1B4
當前约束方式下也可生成↑0的速度,但速度是在第三排中生成的,为区别于第四排所生成的相同速度,可简记为3↑0
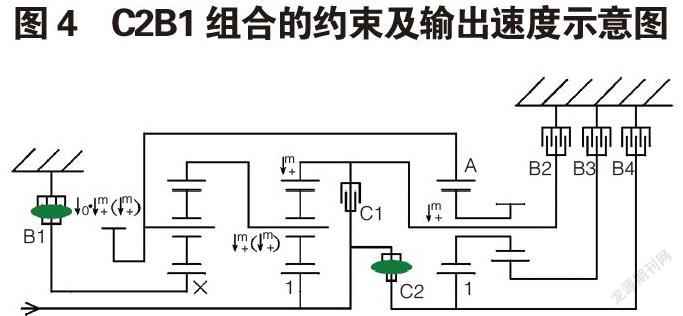
⑥C2B1(难度较大)
当前约束下可生成由第一、第二和第三排联合构成的三排铰链连接。速度分析时,由第三排先入手才能依次将三个行星排分析完整,所以视与输出轴一体的第三排齿圈为临时限速A,假定A为轻微顺时针旋转。根据C2的工作会给予第三排太阳轮1的速度,可知第三排中产生了太阳轮主动,齿圈顺时针受限的约束情况。这种情况与单纯的太阳轮主动,齿圈固定情况相比,由于前者齿圈速度在顺时针方向上有所提高,故从动元件速度会得到提升。所以第三排行星架速度标记为↓m+(右下角标+是指当前复合速度比角标为0时有所提高,右上角标m是指单级行星排内“太阳轮带行星架”的减速程度比“齿圈带行星架”的减速程度更强)。
再根据第二排的太阳轮具备常输入速度1、齿圈具备↓m+速度,则有第二排中太阳轮为主动,齿圈为顺时针受限元件。可知第二排行星架速度标记为↓m+(↓m+)。
根据B1会将第一排太阳轮固定,以及第一排齿圈具备了↓m+(↓m+)的速度,可知第一排行星架速度标记为↓0↓m+(↓m+),可直接输出。
⑦C2B2
C2和B2的工作分别给予第三排太阳轮输入轴的速度1和行星架×的约束,这使得第三排齿圈具备反向速度r↓0(左下角标r是指该速度与输入轴转向相反),可直接输出。
⑧C2B3
当前约束方式冲突,C2B3为无效组合。
⑨C2B4
当前约束方式冲突,C2B4为无效组合。
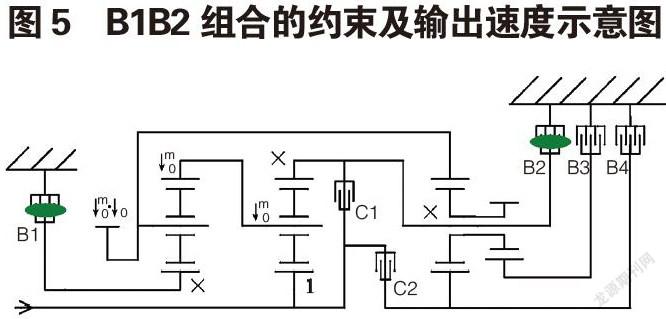
⑩B1B2
B2的工作可以将×约束直接传递至第二排齿圈,再根据第二排太阳轮的常输入速度1,可知第二排行星架速度为↓m0。由于第二排行星架和第一排齿圈一体,所以第一排齿圈速度也是↓m0,再根据B1给予第一排太阳轮的×约束,可知第一排行星架的速度即最终输出速度为↓m0↓0。如图5所示。
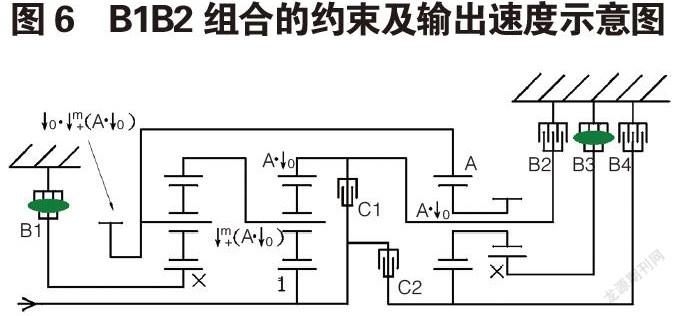
⑪B1B3(难度较大)
当前约束下可生成由第一、第二和第四排联合构成的三排铰链连接。视与输出轴一体的第三第四排公共齿圈为临时限速A,假定A为轻微顺时针旋转。根据公共齿圈A的速度和B3对第四排太阳轮造成的×约束,可知第四排行星架速度标记为A·↓0。为区别于相同变速方式下由第三排产生的A·↓0,当前第四排产生的A·↓0速度可表示为A·4↓0。
再根据第二排的太阳轮具备常输入速度1和齿圈具备的A·4↓0速度,可知第二排行星架速度标记为↓m+(A·4↓0)。
另有B1会将第一排太阳轮固定,以及第一排齿圈具备了↓m+(A·4↓0)的速度,可知第一排行星架速度标记为↓0↓m+(A·4↓0),可直接输出。如图6所示。
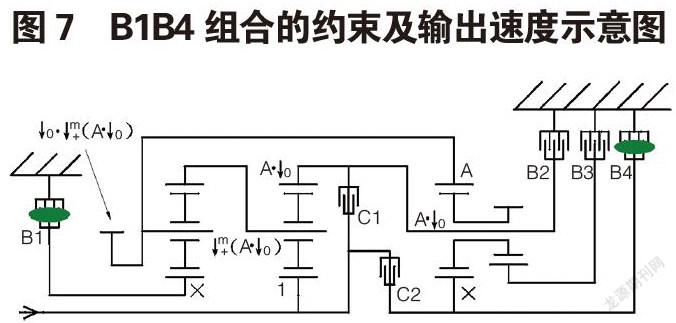
⑫B1B4
当前约束下生成速度的方式与⑪B1B3情况基本一致,第三排行星架速度标记为A·↓0。为区别于相同变速方式下由第四排产生的A·↓0,当前第三排产生的A·↓0速度可表示为A·3↓0。最终输出标记为↓0↓m+(A·3↓0),如图7所示。
⑬B2B3、B2B4、B3B4均为无效组合。
4 各组合速度排列分析
根据前文分析,3↓0>4↓0且3↑0<4↑0,可知↓0↓m+(A·3↓0)>↓0↓m+(A·4↓0)。
在B1B4的↓0↓m+(A·3↓0)和C2B1的↓0↓m+(↓m+)两个速度中,完全展开前者可以表达为↓0↓m+(↓0↓m+↓0),与后者↓0↓m+(↓m+)相比,前者核心速度↓m+的次级速度包含三次减速,而后者为一次。所以前者速度较低。
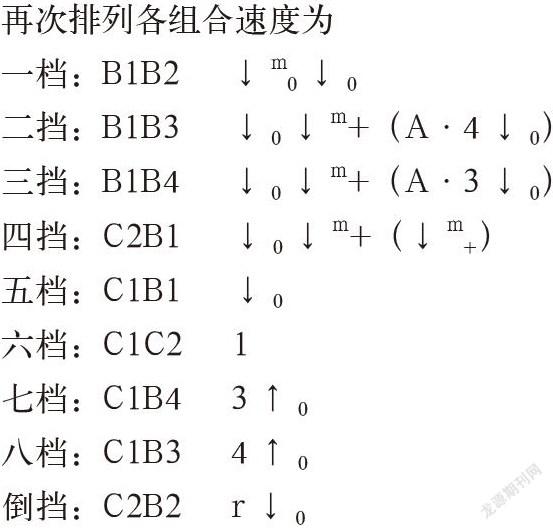
再次排列各组合速度为
一档:B1B2 ↓m0↓0
二挡:B1B3 ↓0↓m+(A·4↓0)
三挡:B1B4 ↓0↓m+(A·3↓0)
四挡:C2B1 ↓0↓m+(↓m+)
五档:C1B1 ↓0
六档:C1C2 1
七档:C1B4 3↑0
八档:C1B3 4↑0
倒挡:C2B2 r↓0
參考文献:
[1]盛瑞传动股份有限公司. 自动变速器[P]. 中国专利,20366835. 2015-09-23.
[2]冮地.行星齿轮式自动变速器动力传递综合分析[D]. 辽宁工业大学硕士学位论文,2019.
作者简介
冮地:(1989.11—),男,蒙古族,辽宁锦州人,硕士,讲师。主要研究方向:自动变速器。
王静:(1987.01—),女,汉族,辽宁阜新人,硕士,讲师。研究方向:数字信息化教学。
猜你喜欢
作文周刊·小学一年级版(2021年36期)2021-01-14
汽车与驾驶维修(维修版)(2019年5期)2019-09-10
广东第二课堂·小学(2017年9期)2017-09-28
民间故事选刊·上(2017年5期)2017-05-17
小学阅读指南·低年级版(2017年1期)2017-03-13
TopGear汽车测试报告(2016年4期)2017-02-06
世界汽车(2015年7期)2015-07-20
汽车之友(2014年18期)2014-09-22
计算机辅助工程(2012年5期)2012-11-21
祝您健康(1993年3期)1993-12-30