
集装箱码头水平运输设备混行技术方案研究
2022-05-12 07:26张肇伦周鸿茂石浛锟郭肇森交通运输部水运科学研究所
珠江水运 2022年8期
◎ 张肇伦 周鸿茂 石浛锟 郭肇森 交通运输部水运科学研究所
1.引言
在新建和改造的自动化集装箱码头规划阶段,码头前沿装卸作业和码头堆场装卸作业的自动化技术已经十分成熟,国内的自动化集装箱码头都采用相似的方案。相比之下,在制定集装箱码头水平运输作业工艺时,要充分考虑堆场箱区布置型式、交通组织方式、无人水平运输设备性能三方面因素,各个因素的不同选择都会对效率产生很大影响。堆场箱区布置型式主要受码头进出口业务比重、作业点数要求、码头平面布局的限制,为保证码头整体装卸任务的高效完成,堆场箱区布置型式一般不会改变。无人运输设备性能则是取决于码头选取的设备,现有的无人水平运输设备均可以满足环境相对封闭的码头作业需求。所以在堆场箱区布置型式和无人水平运输设备性能已经确定的情况下,交通组织方式就成为影响水平运输作业效率的唯一因素。顺岸开放式堆场布置必然会出现无人水平运输设备和外集卡混行工况,目前国内自动化集装箱码头采用的交通组织方式可分为有人和无人水平运输设备的完全隔离、空间隔离、时间隔离。集装箱码头水平运输作业工艺制定流程如图1所示。集装箱码头水平运输设备混行指自动化集装箱码头内无人水平运输设备与外集卡共享码头道路基础设施、自由行驶。本文通过分析现有自动化集装箱码头水平运输设备混行现状和所应用的水平运输解决方案,提出一套适用于顺岸开放式堆场布置的集装箱码头水平运输设备混行技术方案,并总结了其推广意义。
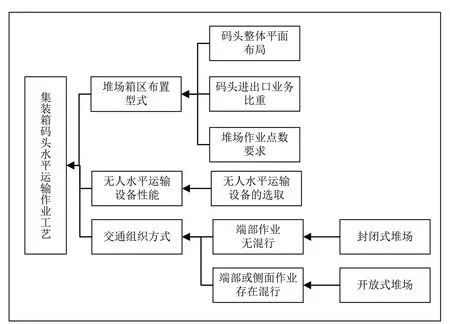
图1 集装箱码头水平运输作业工艺制定流程
2.集装箱码头水平运输设备混行现状
国外集装箱码头应用有人和无人水平运输设备混行方式进行水平运输作业开始的时间较早。2020年4月泰国林查班港D码头应用6辆西井科技的Q-Truck无人驾驶集卡完成了12小时的不间断混行装卸作业。2021年5月,经过一年的安全作业,Q-Truck正式全面投入商业运营,这是全球首个将无人驾驶集卡和有人集卡混行作业投入商业运营的项目,因为混行方案的应用区域是岸桥到场桥的水平作业区,实现的是码头内集卡和Q-Truck无人驾驶集卡的混行作业,不存在与外集卡交互的情况。西井科技所提供的混行解决方案包括其自主开发的车队管理系统FMS(Fleet Management System)和自主研发的Q-Truck无人驾驶集卡。FMS系统对无人驾驶集卡进行统一的调度和路线规划;Q-Truck通过车辆自带的环境感知传感器对周围的人员、车辆、环境进行识别,根据其内置的驾驶逻辑自主完成跟车、换道、超车、避让等动作。与Q-Truck混行的有人驾驶集卡的驾驶员在上岗前需要经过简单的操作培训和安全教育。通过应用西井科技公司提供的混行驾驶方案,集装箱码头不需要为无人驾驶集卡提供封闭的作业区域。
国内自动化集装箱码头近些年建设和改造案例较多,对于开放式堆场中水平运输设备和外集卡混行的解决方案主要有三种。第一种方案是通过道闸处理无人水平运输设备和外集卡的交互,道闸的开启或关闭状态由码头的车辆管理系统进行控制,目前天津港北疆港区C段集装箱码头正在应用这种方案。在混行条件下,IGV和有人驾驶集卡分别有自己的专属车道,但两条车道存在交汇处,IGV在进入堆场作业时会穿行过有人驾驶集卡的专用车道。码头车辆管理系统监测车辆的运行状态,当IGV距离交汇处有足够的距离时,车辆管理系统会打开道闸放行外集卡。第二种方案是外集卡从进闸口到出闸口整个过程走U型路线,无人水平运输设备有自己的独立车道,整个作业过程不存在行驶轨迹上的交叉,目前应用这种方案的码头有山东港口日照港自动化集装箱码头和北部湾港钦州港域自动化集装箱码头。第三种方案是在堆场后方设置无人水平运输设备和外集卡的作业交互区,通过车辆管理系统的调度和路径规划控制无人水平运输设备和外集卡通过作业交互区的时间。目前广州南沙四期自动化集装箱码头应用的是这种方案。
国内外应用混行技术的集装箱码头详细信息如表1所示。

表1 国内外应用混行技术的集装箱码头详细信息
综上所述,国内外对于港口内车辆的管理和调度都是基于车辆管理系统,在不同的混行方案中,车辆管理系统在处理有人车和无人车交汇时所采取的措施是不一样的。目前泰国林查班港D码头实现了无人和有人车辆在港口内无需物理隔离的混行,但是混行区域仅限于码头岸桥到场桥之间的混行,并没有和外集卡有交互,这个区域道路结构相对简单。国内的自动化集装箱码头对于混行的处理方式都是应用物理隔离或者设置单独交互区的方式,实现无人水平运输工具和外集卡在空间和时间上的隔离。目前缺少一套无需物理隔离且应用作业范围更大的混行技术方案。
3.集装箱码头水平运输设备混行技术方案
集装箱进出堆场的作业包括水平运输设备在堆场的取箱、放箱和外集卡在堆场的取箱、放箱。由于开放式平面布局的堆场内存在交叉道路,所以即使规划出水平运输设备和外集卡的专用通道后也会存在两种设备交汇的情况。混行技术方案就是通过技术手段使无人驾驶水平运输设备和外集卡混行作业,实现在行驶和交汇时合理避让,不再通过单独划分独自车道且在交叉路口设置道闸等方式来确保行车安全,从而提升码头的装卸效率和作业安全性。混行技术方案是对自动化码头原有方案的补充和完善,在码头已经具备了水平运输无人化作业的功能后,根据混行作业工况的作业需求增添硬件设备、添加软件功能、融合高新技术,相当于让已经实现自动化的码头更加的智能化。集装箱码头水平运输设备混行技术方案架构如图2所示。
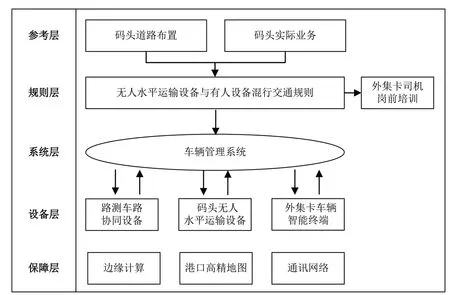
图2 集装箱码头水平运输设备混行技术方案架构
混行交通规则:根据码头的具体作业工况和道路规划,制定共同适用于无人水平运输设备和外集卡的交通规则,导入车辆管理系统,在接收到无人驾驶水平运输设备和外集卡终端实时行驶状态和位置信息后,通过智能算法确定无人驾驶水平运输设备和外集卡进行交汇的位置,然后根据交通规则确定车辆行驶的优先级,适时给无人驾驶水平运输设备发送停车等待指令或给有人车辆发送提醒;提出交通规则也方便有人车辆驾驶员上岗前培训,快速适应码头内作业环境。
车辆管理系统:自动化码头中的必备系统,主要负责码头内作业设备的调度、路径规划、运行状态监控等功能。针对混行的特殊工况,需要对车辆管理系统进行升级,将更多的传感器和终端等融入到其中,无人水平运输车辆、外集卡智能终端、路侧车路协同系统等采集的信息传入到车辆管理系统中进行分析,实现车辆管理系统对混行车辆的集中调度、集中管理。
外集卡车辆智能终端:外集卡车辆智能终端的功能包括码头内导航、接收调度信息、增强外集卡驾驶员对车辆运行状态和行车环境的感知。智能终端辅助驾驶员在行驶过程中对即将发生的事件进行提前预判,同时与车辆管理系统进行信息交互,接受车辆管理系统的统一调度和路口通行时的通行指引。
路侧车路协同设备:路侧车路协同设施的主要功能是采集道路情况、交通状况、外来人或设备进入作业区域的信息。通过路侧传感器和摄像头等采集的感知信息通过通讯网络传输到车辆管理系统,实现增强、补充、验证无人车和外集卡司机的感知不足,以便车辆管理系统高效、准确的管理;通过路侧的摄像头对闯入作业区域内的人或物进行追踪,同时向车辆管理系统发送报警。
边缘计算:边缘计算的主要目的是分散混行条件下产生大量数据的计算和处理负荷,通过对部分计算内容在边缘计算节点中计算来缓解码头计算中心的计算压力,从而确保数据的高效处理和传输。
港口高精地图:港口高精地图的主要功能是辅助无人车辆的厘米级别定位和外集卡的车道级别定位和导航。
通讯网络基础设施:通讯网络基础设施提供高可靠、低延时、广连接、快速接入的网络环境,确保在混行条件下大量的感知设备和车载终端的数据传输需求。
4.结论
集装箱码头水平运输设备混行技术方案是对现有的自动化集装箱码头建设方案的补充,为水平运输作业工艺的制定提供了新思路,而且该技术方案所应用的技术成熟度高,可规模性推广应用。应用混行技术方案,可大幅度的提升港口整体自动化水平、提高集装箱码头水平运输作业效率、降低集装箱码头建设和改造成本、提升传统集装箱码头升级意愿。
猜你喜欢
计算机仿真(2023年2期)2023-03-29
机械设计与制造工程(2022年8期)2022-09-19
智能建筑电气技术(2022年2期)2022-02-06
核科学与工程(2021年4期)2022-01-12
中国金属通报(2020年2期)2020-12-09
环境影响评价(2020年2期)2020-12-02
集装箱化(2020年7期)2020-06-20
运筹与管理(2019年1期)2019-02-15
天津科技(2018年12期)2019-01-02
集装箱化(2016年8期)2016-10-20
