
基于传感器感知信息的物流运输设备故障自动识别
2022-09-19 01:27:10刘晗兵
机械设计与制造工程 2022年8期
刘晗兵
(陕西交通职业技术学院经济管理学院,陕西 西安 710018)
由于每天都有海量的物品需要物流运输,造成物流运输设备长期超负荷运行,容易出现多种故障,因此对于物流运输设备故障的自动识别方法成为了物流运输领域的研究重点。对于物流运输设备故障的识别,主要通过对采集的海量信息数据的分析,高效获取其中重要的信息点,从而对故障点进行准确的定位,实现对物流运输设备故障的自动识别,提高物流运输整体的安全性[1-3]。涂小卫等[4]提出一种基于深度置信网络的牵引电机轴承故障诊断方法,用来解决故障诊断不准确的问题,该方法可以提高设备故障诊断的精度,但是稳定性较差。李远军等[5]提出了一种基于特征提取的物流车辆汽车轴承故障诊断方法,可以有效提高汽车电机轴承故障识别的效率,但是精度较低。为了提高故障类型识别精度和稳定性,本文设计了一种基于传感器感知信息的物流运输设备故障自动识别方法,并通过仿真实验分析了其性能。
1 基于传感器感知技术的物流运输设备故障自动识别方法
1.1 定位物流运输设备故障
在对物流运输设备故障定位的过程中,首先利用小波变换对故障位置进行定位[6],假设φ(t)为小波函数,则小波变换函数φg,h(t)为:
(1)
式中:g为小波系数;h为小波因子;φg,h(t)为利用φ(t)的变换而得到的小波系数,其中t为小波变换系数的连续变量。通过改变小波系数和小波因子的值,能够获得故障定位函数[3]。
设y(t)为物流运输设备故障信号,根据式(1),利用小波函数φ(t)对y(t)进行离散小波变换,得到新的小波变换系数Uy(g,h)为:
(2)
由式(2)可知物流运输设备发生故障时的故障信号是连续的[7]。利用物流运输设备故障信号的连续性离散小波函数,能够获得小波离散函数。根据小波离散函数对各个尺度上的故障信息进行变换计算:
(3)
式中:Uy(2l,2lt)为各个尺度上故障信息的系数;l为各个尺度上故障信息的变换阈值。利用小波分解法对小波方程式进行重构[8],得到各故障点之间的距离均值K为:
(4)
式中:m为数据库中含有的故障数据数量;j为运行的故障数据数量;kj为数据之间的距离。
通过对小波函数的分解与重构,可以实现对物流运输设备任意故障点f(t)的定位:
(5)
式中:f(t)为距离故障信号最近的信号;dl,0为各个尺度上故障信息的变换阈值取值区间;fl(t)为距离第l层故障信号最近的信号;Rl(t)为f(t)信号在第l层的细节部分的小波系数。利用小波基函数分解得到物流运输设备故障位置的小波系数dl,v,可分解为:
dl,v=〈f(t),φl,v(t)〉
(6)
式中:dl,v为l点到v点之间物流运输设备故障位置的小波系数;φl,v(t)为利用φ(t)的变换而得到的l点到v点之间的小波系数。
再对不同尺度的物流运输设备故障信号进行调节与重构[9],可实现对物流运输设备故障的准确定位:
(7)
式中:Bl为小波因子,能够调节故障信号的幅度大小。
根据上述步骤即可完成对物流运输设备故障的定位,接下来通过对物流运输设备故障的诊断,为故障识别提供可靠依据。
1.2 构建物流运输设备故障诊断模型
对物流运输设备的故障进行诊断时,假设物流运输设备运行状态的有限集合为Ω={ζ1,ζ2,…,ζN},物流运输设备故障的诊断信息与物流运输设备运行状态之间的相关概率为p={ζn∈Ω},其中ζn为某个物流运输设备运行状态,则利用物流运输设备运行状态描述物流运输设备运行过程中不确定因素[10]的公式为:
(8)
式中:W(ζ)为物流运输设备运行过程中不确定因素。
假设物流运输设备的诊断信息反映了物流运输设备运行状态的不确定性,二者之间存在关联关系,当物流运输设备运行的不确定性降低时,说明此时的物流运输设备故障诊断效果较好[11]。物流运输设备故障的诊断信息与物流运输设备运行状态之间的关联关系F(ζ;X)为:
(9)
式中:p(ζ,x)为物流运输设备故障的诊断信息与物流运输设备运行状态之间的相关概率;p(ζ)为物流运输设备故障的诊断信息出现次数;p(x)为物流运输设备运行状态总值。
假设物流运输设备故障信息为X,已知X=xj,其中xj为物流运输设备的故障点位置集合,则物流运输设备运行状态的条件熵W(ζ|X=xj)为:
(10)
在物流运输设备故障点的位置已知时,物流运输设备运行状态的平均熵值W(ζ|X)为:
(11)
通过子系统获取更多的故障信息数据(如发动机的转速信息、冷却液的温度等[12]),通过与历史数据的对比,即可对物流运输设备的故障状态进行诊断。本文通过融合层次诊断方法,构建物流运输设备故障诊断模型,如图1所示。

图1 物流运输设备故障诊断模型
1.3 传感器感知信息的物流运输设备故障识别算法
在得出物流运输设备故障诊断结果的基础上,利用传感器感知信息系统设计一种物流运输设备故障自动识别算法[13]。传感器感知信息系统的表达式为C{Q,Bs,Bε,F,D},其中Q为传感器信息集,Bs为传感器感知信息的约束集,Bε为物流运输设备的总线约束集,F为传感器控制集,D为传感器感知信息系统的接口网关。
在传感器感知信息系统中,由传感器对物流运输设备运行过程中的状态数据进行测量,再将状态数据通过传感器约束集Bs传输给相应的传感器控制集F,最后对信息数据格式进行转换[14],得到传感器感知信息系统的传输拓扑结构图(图2)。

图2 传感器感知信息系统拓扑结构图
定义传感器感知信息物流运输设备故障识别信息集Y={Yf,Ys,Yo},其中Yf为物流运输设备快速故障的采集数据,Ys为物流运输设备慢速故障的采集数据,Yo为物流运输设备故障的全部数据集,三者可用下式描述:
(12)
式中:Yfi为Yf中的快速故障数据,共有N个;Ysj为Ys中的慢速故障数据,共有M个;Yok为Yo中的故障数据,共有Q个。
随后利用传感器感知信息系统定义物流运输设备故障的信息:
(13)
式中:afai,asaj和aoak分别为3种物流运输设备故障的数据帧;afbi,asbj和aobk分别为3种物流运输设备故障的应答数据帧;RC为传感器感知信息系统的运行周期;RK为物流运输设备故障信息采集的周期。
通过上述操作,可以确定物流运输设备故障信息的采集列表以及物流运输设备故障的采集周期,再对式(12)、(13)进行归一化处理,得到物流运输设备故障识别集Z为:
Z=(Zi|i=1,2,…,N+M+Q)
(14)
式中:Zi为识别到的物流运输设备故障数据。
至此,完成物流运输设备故障的自动识别。
2 仿真实验
为了验证基于传感器感知信息的物流运输设备故障自动识别方法(简称本文方法)在实际应用中的性能,以某物流运输公司的10辆重大件陆上运输车辆为研究对象,如图3所示。

图3 物流运输设备
图3所示的运输车辆可承运各类超重、超大的单件和成套设备,实现海陆大件运输的对接服务。由于长期从事长途运输且维修保养条件有限,导致10辆车存在多种故障,每辆汽车的实际故障见表1。
由表1可知,实验所用运输车辆存在多种故障问题,为方便分析,对以上故障进行编号,发动机故障、离合器故障、刹车系统故障、轮胎故障、转向系统故障、悬挂系统故障分别为故障1~故障6。
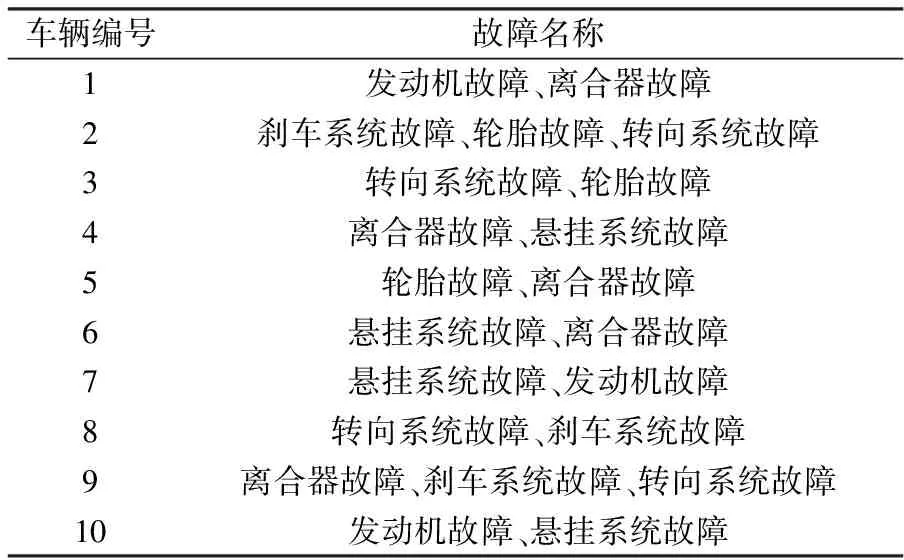
表1 设备故障
为了验证物流运输设备故障自动识别效果,对本文方法与文献[4]方法、文献[5]方法进行故障种类识别对比,结果见表2。

表2 不同方法故障种类识别结果
由表2可知,本文方法可对10辆运输汽车的故障进行准确识别,文献[4]、文献[5]方法进行故障种类识别时的准确度较低,出现多次种类识别错误现象。例如,文献[4]方法在对车辆2、车辆3、车辆4、车辆6以及车辆9进行检查时出现故障种类识别错误,而文献[5]方法在对车辆2、车辆3进行检查时出现故障种类识别错误,由此可知本文方法的故障种类识别精度更高。
用本文方法、文献[4]方法、文献[5]方法对物流运输设备故障信息识别的响应频率进行测试,测试结果如图4所示。
从图4可知,与另外两种方法相比,本文方法的响应频率呈现出稳定的波动趋势,说明本文方法适用于物流运输设备故障的识别,可以提高物流运输设备故障识别的稳定性。而另外两种方法的波动较大,证明其稳定性还需提高。

图4 物流运输设备故障信息识别的响应频率测试结果
为了更深入分析本文方法的故障识别效果,对3种方法的故障识别时间进行对比,所得到结果如图5所示。
从图5可以看出,文献[4]方法与本文方法的故障识别所用时间均较短,但总体来看,还是本文方法的识别时间更短,最少为6.2 s。综合上述分析内容可知,本文方法不仅可以保证故障识别精度,还能以较少的时间消耗完成故障识别,进一步证明了本文方法的有效性。

图5 物流运输设备故障识别时间测试结果
3 结束语
本文提出的基于传感器感知信息的物流运输设备故障自动识别方法,对物流运输设备故障类型识别精度较高,且最快可在6.2 s内完成故障识别,效率较高。受限于条件,本文研究还存在很多不足,在今后的研究中,希望可以通过构建物流运输设备故障诊断专家系统,保证物流运输设备的安全性与稳定性。
猜你喜欢
核科学与工程(2021年4期)2022-01-12 06:30:28
科技风(2021年19期)2021-09-07 14:04:29
中国金属通报(2020年2期)2020-12-09 13:51:20
环境影响评价(2020年2期)2020-12-02 01:23:26
电子制作(2019年13期)2020-01-14 03:15:32
特别健康(2018年3期)2018-07-04 00:40:18
制造技术与机床(2017年10期)2017-11-28 05:20:43
科技与创新(2017年1期)2017-02-16 20:55:03
发明与创新(2016年26期)2016-08-22 03:23:28
电测与仪表(2016年6期)2016-04-11 12:06:38
