无人机影像结合激光扫描在地面停车场测量中的应用
2022-05-11 01:25白振军范文超
测绘技术装备 2022年1期
王 研 ,白振军,范文超
(1.长庆工程设计有限公司,陕西西安 710018;2.陕西天度云激光科技有限公司,陕西西安 710021)
1 引 言
随着5G技术、大数据、物联网等高新技术的发展,数字城市建设成为未来发展的必然趋势。在精确导航的基础上配合数字化停车场地图,可实现停车场的智能导航。因此,停车场及其附属设施的数字化也是今后测量领域的热点。
停车场数字化的附属信息多,不仅要求测绘车道线、出入口标志、闸机、转向箭头、导流线、减速带等信息,而且测量要求也更加精细(如车道线宽5 cm)。地理要素测量如此庞杂且高精度,传统的测量精度一般为3~5 cm,不能满足测量精度要求,并且信息记录和表述困难。
地面三维激光扫描技术在采集速度、测量精度、信息多元化等方面都具有强大的优势,配合其自带像机可实现地面建筑物点云和影像的全获取[1],测量精度可控制在2 cm以内。
因此,地面三维激光扫描是解决上述问题的一个很好的方案。但是当地面建筑物结构复杂、遮挡较多时,扫描和拍照时总存在缺漏的地方,影响后期地面信息的判读。如果飞行条件容许,结合无人机正射影像,将解决三维激光扫描仪点云和影像获取不足的问题,直观且清晰地实现后期的信息解读和成果制作[2-3]。
2 地面停车场三维激光扫描
2.1 工程要求
测图要求:详细表述停车场各单元信息、附属物及周边建筑,如图1-3所示。测图比例尺为1∶100,平面位置精度≤5 cm,高程精度≤10 cm,成果形式为二维CAD图纸。
2.2 选择仪器
本次采用的仪器为徕卡P40,仪器的参数如表1所示。
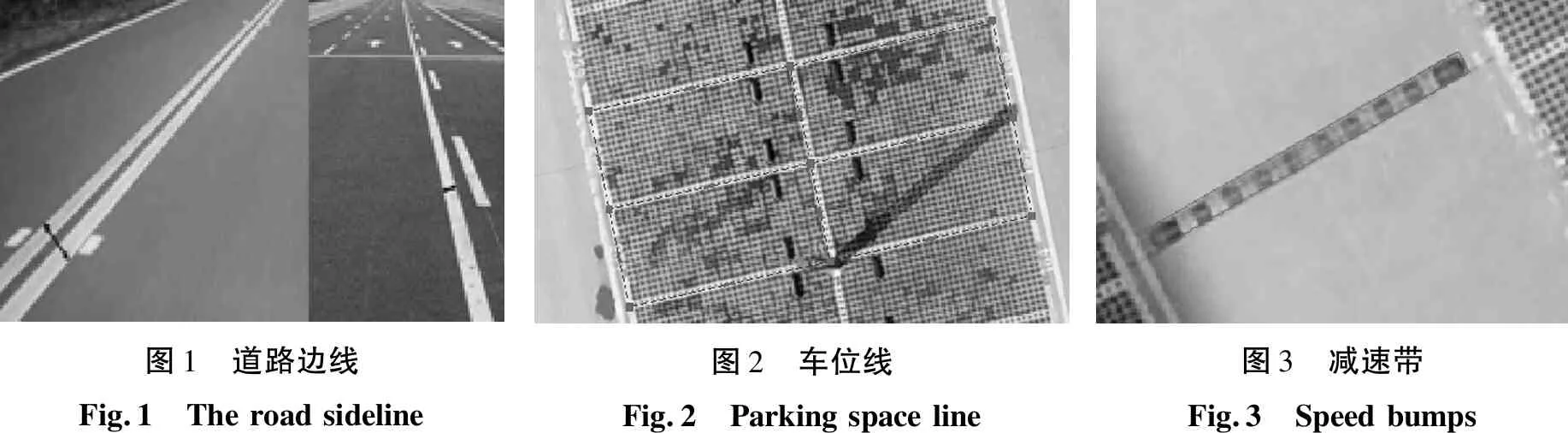
图1 道路边线Fig.1 Theroadsideline图2 车位线Fig.2 Parkingspaceline图3 减速带Fig.3 Speedbumps

表1 徕卡P40参数Tab.1 ParametersofLeicaP40名 称参 数扫描距离/m270扫描速度/(点/s)1000000点位精度/mm3,506,100距离精度/mm1.2mm+D×10-6视场角/(°)水平360垂直270
2.3 数据获取及处理
外业扫描时先对场地进行踏勘,依据地形布设控制点,控制点布设时应兼顾无人机像控点布设的要求,扫描作业时将地面控制点同时扫描[4]。图4、图5分别为扫描作业和布设控制点照片。

图4 扫描作业Fig.4 Scanning operation

图5 布设控制点Fig.5 Layout of control points
扫描完成后,将各站的扫描数据导出。首先,对各站进行数据降噪[5],如某单站扫描的点云数据中包含控制点,需将控制点信息添加到点云中,以便后期的坐标转换;其次,依据公共标靶点进行数据拼接,并结合工程需要按照地面控制点信息进行坐标系转换;最后,将数据导入CAD中进行平面和立体图制作。图6为整体作业流程[6]。

图6 三维扫描作业流程Fig.6 3D scanning process
3 地面停车场无人机作业
3.1 选择仪器
本次选用大疆PHANTOM 4 RTK无人机进行作业,飞行高度约100 m,地面平均分辨率达到5 cm。相关参数设置如表2所示。
3.2 作业流程及数据处理
无人机地面像控点可选择三维激光扫描时布设的控制点,在控制点上可覆盖十字丝光标,飞行完成后通过软件进行数据处理,进行正射影像的制作。其作业流程如图7所示。
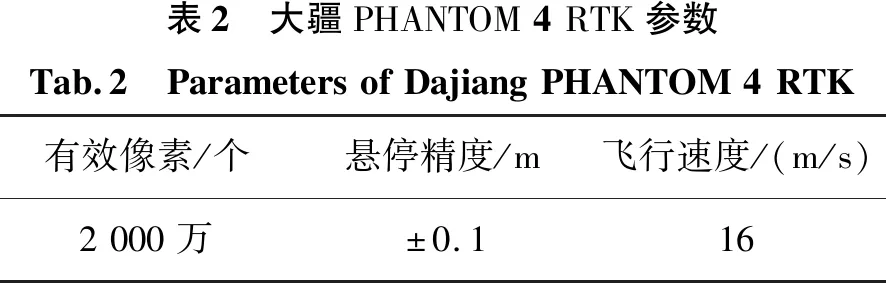
表2 大疆PHANTOM4RTK参数Tab.2 ParametersofDajiangPHANTOM4RTK有效像素/个悬停精度/m飞行速度/(m/s)2000万±0.116
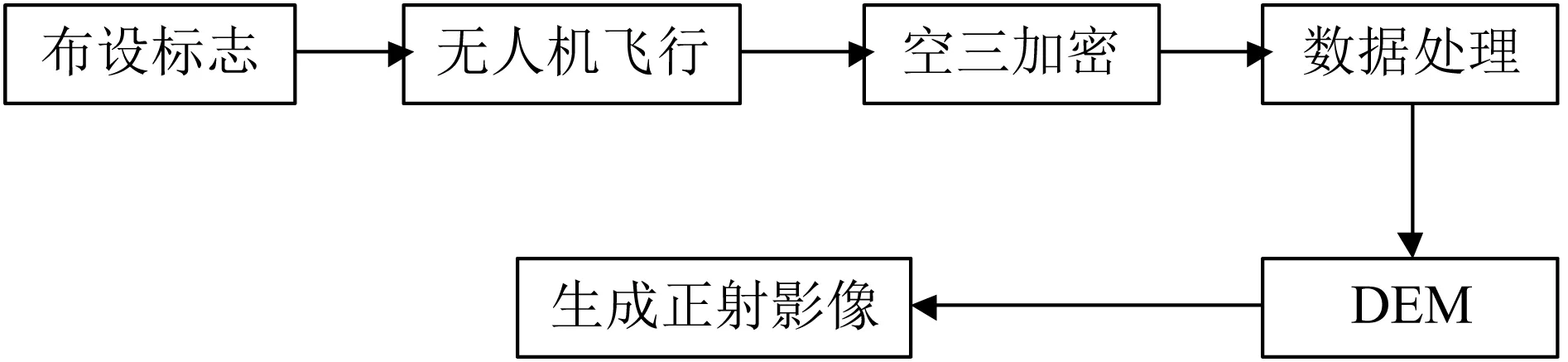
图7 正射影像图制作流程Fig.7 Production process of orthophoto map
4 点云和正射影像融合
处理后的点云数据和制作完成的停车场正射影像图分别如图8和图9所示。
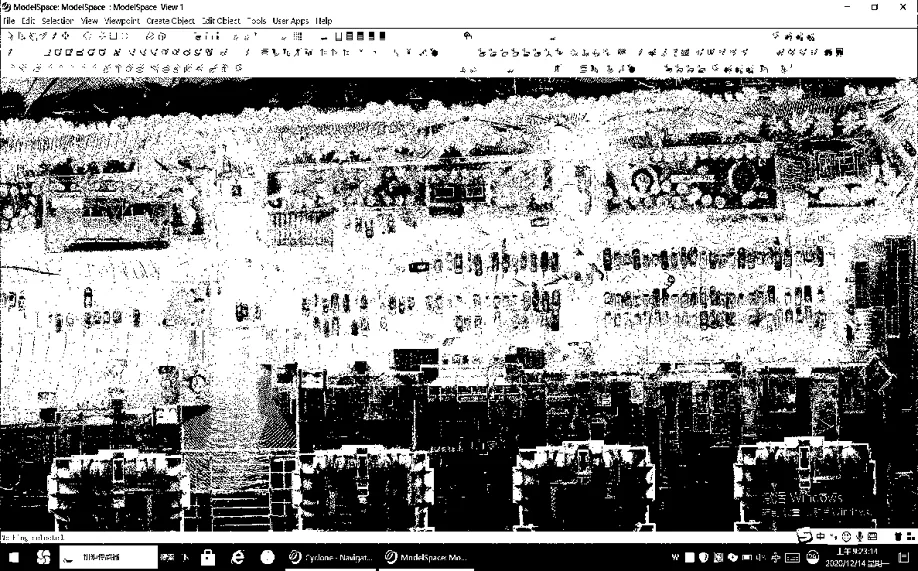
图8 停车场点云数据Fig.8 Point cloud data of parking lot

图9 停车场正射影像Fig.9 Orthophoto of parking lot
将点云和正射影像导入CAD中,按照坐标进行叠加,并依据点云和影像进行制图。
图10为融入影像的点云,图11为制作的停车场CAD成果。

图10 点云及正射影像Fig.10 Point clouds and orthophoto maps
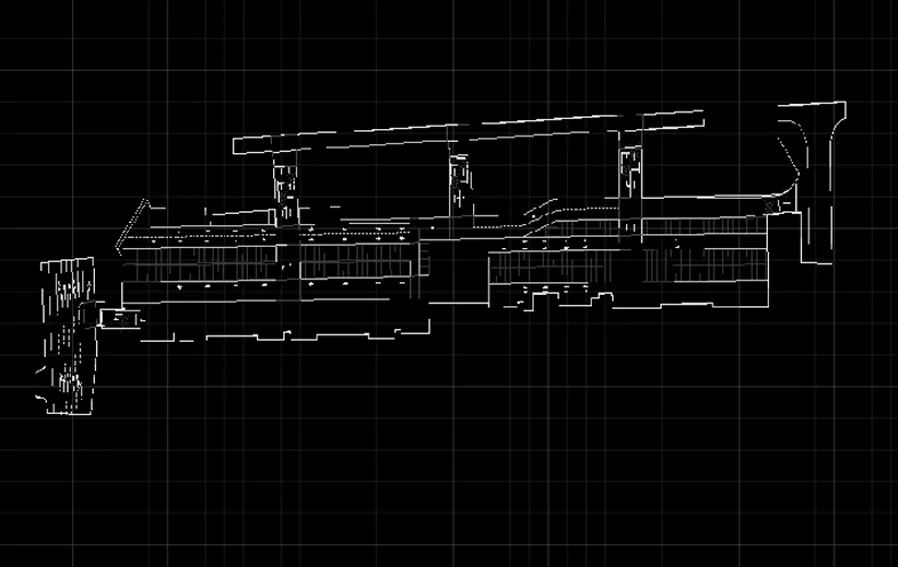
图11 停车场CAD图Fig.11 CAD drawing of parking lot
5 精度统计
为了检验成果精度,现场使用徕卡全站仪TS09进行测量,仪器测角精度1″、测距精度2 mm+2D×10-6架设于控制点上随机对几处线状地物进行测量,并与CAD图纸坐标进行对比。表3为坐标精度对比。

表3 精度对比Tab.3 Precisioncomparison序号ΔX/cmΔY/cmΔZ/cmΔS/cm11.70.50.61.8721.01.31.42.1630.71.11.72.1440.71.71.62.4451.11.01.92.4161.31.01.52.2270.81.22.03.2482.11.00.72.4390.91.51.72.44101.00.82.22.55中误差mx=1.21my=1.16mz=1.74m=2.41
6 结束语
通过点云叠加正射影像采集的停车场车位线和导向标识,经过GNSS-RTK抽样检测,中误差为2.41 cm,满足工程精度要求。本文得出的结论如下:
1)诸如停车场、机场等建筑数字化采集时,地面标志、导向箭头等要素采用全站仪测量时,数据采集量太大且不易描述记录;采用GNSS-RTK方式时采集点精度不易控制且易受到建筑物、树木等遮挡,卫星数量少,解算慢,影响作业效率。通过实践,采用手持激光扫描仪无需后期数据拼接,其成果精度经过测试,满足工程要求,今后可作为此类项目作业的优先技术手段。
2)城镇区域地面停车场数字化测量时适合采用地面三维激光扫描的方式进行数据采集和成果制作,作业时应尽量选用自带拍照功能的扫描仪,这样采集的点云附着影像,有利于后期物体的识别和绘制。
3)城镇周边有条件进行无人机拍摄时,可采用无人机进行正射影像的制作,无人机生成的正射影像具有整体性强、直观且清晰的特点,弥补了三维激光扫描仪采集像片中的不足,有利于作业人员进行后期影像的判别和绘制。
猜你喜欢
全球定位系统(2022年1期)2022-04-14
科技信息·学术版(2022年3期)2022-02-21
动漫界·幼教365(大班)(2021年4期)2021-05-23
全球定位系统(2021年1期)2021-03-26
思维与智慧·下半月(2021年3期)2021-03-25
阅读(快乐英语高年级)(2020年6期)2020-08-28
数学大王·低年级(2019年12期)2019-08-14
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
中学数学杂志(高中版)(2016年4期)2016-07-27
中学数学杂志(高中版)(2008年5期)2008-11-24