基于图像识别的大型建筑钢结构形变监测研究
2022-05-11 00:32陈宗玥
测绘技术装备 2022年1期
陈宗玥
(浙江省工程物探勘察设计院有限公司,浙江杭州 310000)
1 引 言
近年来,随着建筑业的不断改革和发展,在保证建筑物实用性的同时也开始注重美观[1],例如鸟巢、国家会议中心、国家体育馆等。但这些建筑大多为钢结构建筑物,随着时间的推移不可避免出现钢结构形变等情况。因此,在建造过程中进行建筑结构形变监测是十分重要的步骤[2]。但钢结构建筑体量巨大,拼接构件烦多[3],如何安全且高效地监测其形变程度是目前亟待解决的问题。
朱茂[4]等人提出基于InSAR技术的建筑钢结构形变监测方法。该方法通过PSP-InSAR技术分析建筑数据,结合建筑物自身属性和建筑材料等信息,预测不同时间钢结构形变变化趋势,从中获取建筑物不同位置PS点的差异形变和倾斜量,计算大致形变风险,通过与标准数据对比获取InSAR形变结果,实现建筑钢结构形变监测。然而,此方法在监测钢结构形变前未对大型建筑钢结构图像进行预处理,导致干扰因素过多,无法有效监测形变位置,经常错误监测形变位置或监测不到实际形变位置,严重影响监测效果。
马瑞[5]等人提出基于北斗伪卫星系统的建筑钢结构形变监测方法。该方法首先构建北斗伪卫星系统,将接收机放置在建筑钢结构监测点处,并实时打印监测结果,通过接收机定位结果的变化判断监测点处是否发生变形,以此实现建筑钢结构形变监测。但是,该方法没有提前对图像进行灰度化处理,在监测过程中只能以彩色图片形式进行形变监测,导致颜色等无用信息对监测过程造成严重干扰,降低图像监测形变结果,无法精确识别形变曲度,导致形变曲度误差过大。
杨义辉[6]等人提出基于多频多系统GNSS OEM板卡的建筑钢结构形变监测方法。该方法利用数据解码、基线处理、网平差和坐标转换等手段获取实时建筑钢结构监测站点高精度空间坐标,通过串口通信获取板卡多频多系统观测信息进行系统解算,得到钢结构形变实时定位,实现建筑钢结构形变监测。该方法在监测过程中未及时处理大型建筑钢结构图像,导致图像像素较低,无法突出钢结构形变区域,只能模糊识别形变位置。
为了解决上述方法中存在的不足,本研究提出基于图像识别的大型建筑钢结构形变监测方法。与传统方法相比,该方法增强了建筑钢结构图像的处理,提升了建筑钢结构形变监测的精度。
2 大型建筑钢结构图像预处理
目前,大型建筑钢结构图像均为彩色图像,由于彩色图像占用较大储存空间,且对监测形变没有任何意义,因此,在大型建筑钢结构监测前需要将图像进行灰度化处理。此外,为了更加准确地监测钢结构形变,可对图像进行增强处理。
2.1 大型建筑钢结构彩色图像灰度化
彩色图像颜色分量会消耗大量资源,降低大型建筑钢结构监测效率。因此,将彩色图像灰度化,即将颜色分量R、G、B转换为统一的特殊图像,此时图像只包含亮度信息,对监测钢结构形变实时性更加有利。
已有的彩色图像的灰度变换方法有最大值法、平均值法以及加权平均值法[7],但前两种方法获取图像中相同像素区域的亮度相同,导致灰度值大的区域过亮,不利于监测;加权平均值法是基于视觉模型选择系数,可智能调节图像区域亮度,最终获取的灰度图像更符合要求。
加权平均值法中将大型建筑钢结构彩色图像像素点R、G、B赋予一个特定加权系数,并将每个系数与自身系数乘积相加,获取大型建筑钢结构彩色图像灰度化结果,计算公式如下:
I=0.587G+0.299R+0.114B
(1)
式中:I表示灰度图像的灰度值。
2.2 大型建筑钢结构同态滤波增强
彩色图像灰度化处理后,为提升大型建筑钢结构监测的效果,需要对其图像做进一步的增强处理。
假设大型建筑钢结构图像为g(x,y),且建筑物所处环境均受阳光照射,此时大型建筑钢结构图像可表示为:
g(x,y)=gr(x,y)×gi(x,y)
(2)
式中:gr(x,y)表示大型建筑不均匀光照反射分量,gi(x,y)表示大型建筑不均匀光照入射分量。入射分量是变化缓慢的低频元素,包含不均匀光照;反射分量是高频元素,包括建筑物细节等特性。利用对数获取空间域内具有相加关系的图像g(x,y)为:
ln[g(x,y)]=ln[gr(x,y)×gi(x,y)]= ln[gr(x,y)]+ln[gi(x,y)]
(3)
式中:gi(x,y)代表频谱元素,gr(x,y)代表图像特性。
基于图像g(x,y)的相加关系,通过离散傅里叶变换处理后的频域为:
Fln(u,v)=F[lngr(x,y)+lngi(x,y)]=Fr,ln(u,v)+Fi,ln(u,v)
(4)
式中:Fln(u,v)代表离散傅里叶变换,u、v分别代表图像频域内像素点。
若建筑物钢结构的光照不均匀,灰度图像会出现亮度不均的情况[8],为保证图像不受光照不均的影响,可减少频谱元素。根据图像特性,构建其专属同态滤波器T(u,v),降低低频元素的同时加强高频元素,进而弥补光照不均影响,实现增强图像对比度,其频域为:
Pln(u,v)=T(u,v)Fi,ln(u,v)+T(u,v)Fr,ln(u,v)
(5)
并利用离散傅里叶逆变换获取相应空间域[9],即:
F-1{Pln(u,v)}=F-1{Pr,ln(u,v)}+F-1{Pi,ln(u,v)}
(6)
式中:F-1{Pln(u,v)}代表离散傅里叶逆变换过程。
最后,利用指数计算即可获得滤波后的增强图像:
P(x,y)=exp{F-1[Pln(u,v)]}
(7)
式中:P(x,y)代表滤波后的增强图像。
3 大型建筑钢结构形变监测实现
基于上述大型建筑钢结构图像处理结果,实现监测钢结构形变。本文将形变监测问题转换为识别形变图像问题,可减少监测工作量,提升监测精度。
3.1 大型建筑钢结构形变标识边界位置确定
在大型建筑钢结构形变监测中,形变结构监测流程如图1 所示。

图1 大型建筑钢结构形变监测流程图Fig.1 Deformation monitoring flow chart of large building steel structure
利用灰度化处理和增强图像进行标识[10],记录图像中各行各列Value为1的像素个数,以此构建由Y={b1,b2,…,bn}以及X={a1,a2,…,an}组成的线性队列空间,在此空间内将图像边界信息{x1,x2}和{y1,y2}作为图像特征信息并加以保存。
若已知大型建筑钢结构图像中标识点的大小,比较形变目标x轴和y轴相应的边界{x1,x2}和{y1,y2},则两个方向上的单像素的实际大小为:
(8)
式中:d表示形变,L表示目标的大小。
(9)
式中:dx和dy分别表示在平面坐标轴X和Y方向上的实际大小值。
3.2 标识边界位置信息提取
将线性队列X={a1,a2,…,an}和Y={b1,b2,…,bn}根据空间序列扩展,并求解序列中各点斜率f′(n),在符合f′(Xn)<-High/2和f′(Yn)<-Width/2的所有点中提取最大点{x1,x2}和第二大点{y1,y2},将这两点当作边缘位置信息,分别获取钢结构形变特征点D1、D2、D3、D4。
统计矩阵中x值和y值具有相同数量的点,将x值和y值中最大点分别记为maxX和maxY,则备用钢结构形变的区域大小就是最大x值和最大y值的乘积,即maxX×maxY。
假设标识图像点的中心坐标为(a,b),令a=x1,b=y1,依次提取矩阵内成分,并判断其长为maxX,宽为maxY区域中矩阵内是否有以(a,b)为中心的点,当中心点在此区域中时,需要重新计算中心点坐标。计算公式如下:
(10)
式中:n表示目前备用区域中所有点数量。
在遍历矩阵后,保存目前的中心点坐标D1,并反复进行上述步骤,直到获取D2、D3、D4后停止计算,即实现了图像的二值化[11-12]。
根据dx、dy以及焦距f,即可求解拍照设备到形变目标标识的距离Lc,计算前后帧图像内的特征点信息,即可得到空间中所有方向上钢结构的位移信息。
为避免拍摄设备自身原因影响形变监测结果,需要对设备进行畸形矫正,可以利用二阶插值法对其进行校正,校正后的钢结构位移大小表达式为:
F(x)=8.947-0.673 2x+0.001 54x2
(11)
式中:x表示垂直光轴方向的位移大小。
通过上述分析,求解出钢结构位移结果即可实现钢结构形变监测研究。
4 试验分析
4.1 试验环境及参数
为了验证本研究所提方法的整体有效性,进行了试验研究。试验中以某地一大型建筑钢结构为研究对象,该结构高20 m,宽30 m,共有5层。该建筑建成已有5年时间,其间其结构存在一定改变,试验环境如表1所示。

表1 试验环境Tab.1 Experimentalenvironment试验配置试验参数CPU赛扬2.4GHz内存512M操作系统Matlab2007a
4.2 结果分析
为验证所提方法的有效性,试验对比所提方法、文献[4]InSAR技术地铁沿线建筑物形变监测方法以及文献[5]基于北斗伪卫星系统的建筑形变监测方法,对样本大型建筑钢结构的形变进行监测,首先确定样本图像的变形点,再采用三种方法对其进行监测,得到的试验结果如图2 所示。

图2 不同方法大型建筑钢结构形变监测结果Fig.2 Deformation monitoring results of large building steel structure by different methods
从图2可以看出,样本图像中存在4处形变,分别采用所提方法、文献[4]方法以及文献[5]方法对其进行监测,得到的监测结果存在一定差异。其中,文献[4]方法只能准确监测出钢结构较明显的形变处,共计2处;文献[5]方法共监测出3处形变;经核对此方法监测的形变中有2处错误形变。经比较后发现只有本研究所提的方法最适合形变监测,且监测精度保持在约95%以上。这是由于所提方法在监测钢结构形变监测前将建筑图像进行预处理,保证建筑图像精度,提高了监测效果。
试验分析了三种方法对样本建筑形变曲度误差的监测,得到的结果如图3 所示。

图3 不同方法形变曲度误差Fig.3 Deformation curvature error by different methods
分析图3 可以看出,利用三种方法监测样本图像中的形变区域,并对比三种方法监测出的曲度精度。其中,所提方法的最大误差低于3 mm;但文献[5]方法曲度误差最低为4 mm以上,最高达到9.5 mm;文献[4]方法曲度误差最低为4.7 mm以上,最高达到6.8 mm。综上对比,本研究所提方法的监测效果最好,这是由于所提方法将图像提前进行灰度化处理,再进行形变监测,降低颜色等无用信息带来的干扰,在保证监测速度的同时,提高了监测精度,降低了曲度误差。
为进一步验证所提方法的有效性,将样本建筑钢结构形变图像分别横截成5份、10份、15份、20份和25份,判断监测的形变位置与实际形变位置的误差位移大小,得到的结果如图4 所示 。
由图4可知,所提方法在X轴上的误差不超过0.7 mm,在Y轴上的误差不超过0.3 mm,而其他两种方法在X轴和Y轴上的误差均超过1.0 mm。由于所提方法根据在监测过程中对图像进行增强处理,使得图像更加清晰,突出钢结构形变区域,可以精确识别形变位置,从而降低形变位移误差。
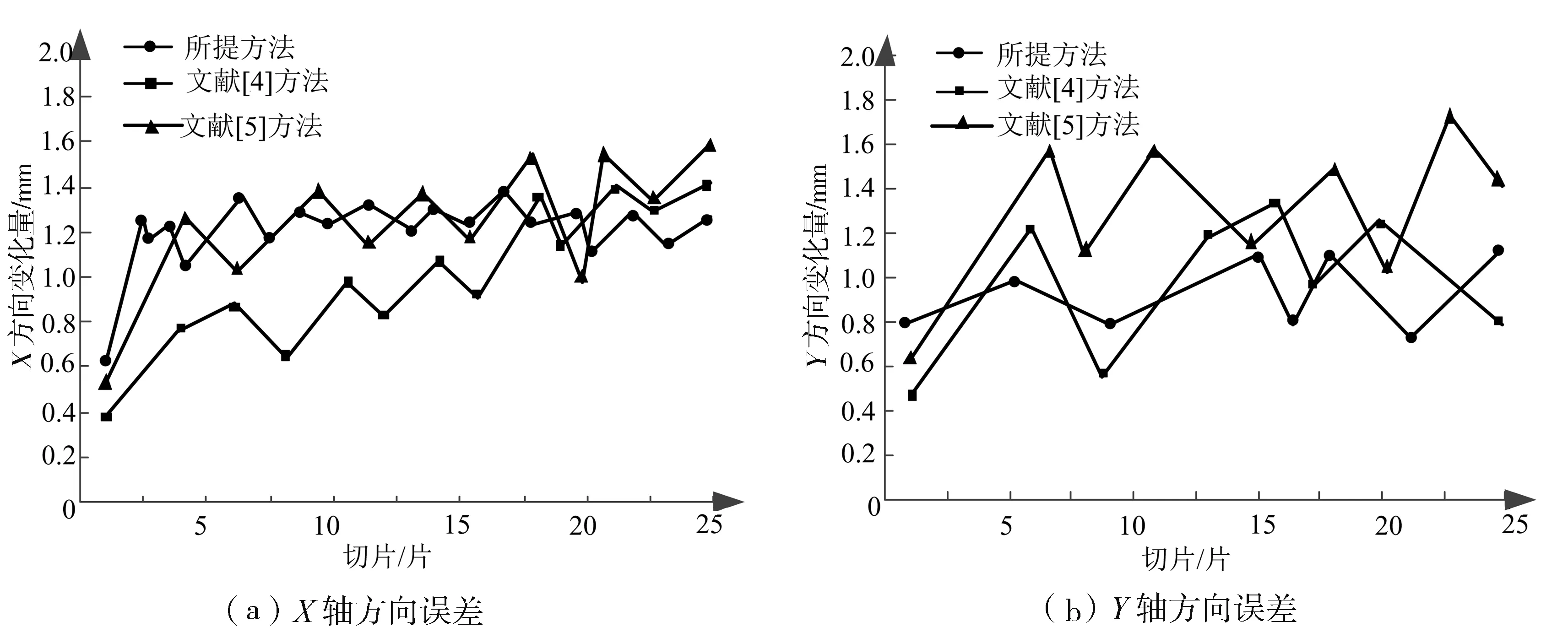
图4 三种方法建筑钢结构不同方向形变量Fig.4 Shape variables in different directions of building steel structure by three methods
5 结束语
本研究提出基于图像识别的大型建筑钢结构形变监测方法,该方法首先对钢结构图像进行预处理,其次提取标识图像坐标轴上的特征信息,计算出形变实际位移,从而实现大型建筑钢结构形变监测。该方法解决了大型建筑钢结构形变监测效果差等问题,对保证建筑稳定及社会财产安全具有一定理论参考意义。
猜你喜欢
兵器装备工程学报(2022年8期)2022-09-13
建材发展导向(2022年14期)2022-08-19
建材发展导向(2022年14期)2022-08-19
建材发展导向(2022年14期)2022-08-19
北京航空航天大学学报(2022年6期)2022-07-02
医学概论(2022年4期)2022-04-24
建材发展导向(2022年5期)2022-04-18
中医正骨(2022年1期)2022-04-18
家庭医药(2021年5期)2021-05-11
集装箱化(2021年1期)2021-04-12