双目视觉和机器学习的拆回电能表微颗粒清洗系统
2022-05-11 01:30:14朱小超解秦虎
西安工程大学学报 2022年2期
朱小超,张 磊,解秦虎,黄 莺,崔 悦
(国网宁夏电力有限公司 银川供电公司,宁夏 银川 750000)
0 引 言
伴随供电行业的快速发展,用电信息采集以及利用频次的不断增多,电能表使用量增加。由于发生故障、需拆除等因素,作为电能表全寿命管理的重要收尾环节,拆回电能表准确计量对于提高电力服务质量具有重要意义[1-2]。但是由于季节因素以及周围环境的影响,电能表的表面存在灰尘、标签等污渍,导致清洗效果不佳,因此,需要设计一种有效的拆回电能表污渍清洗方法,提高电能表运行的可靠性,保证检定结果准确[3-4]。
部分学者提出关于电能表的故障检测及分类系统,对其进行智能管理,取得较好的研究效果,但是在电能表清洗方面,传统的电能表清洗方法仅利用电机带动毛刷进行灰尘清洁,无法对附着在电能表内的顽固污渍进行精准定位,导致清洗效果不到位[5]。
现代化拆回电能表管理系统中,双目视觉技术能够无接触获取环境以及器具的数据,为系统提供视觉信息,机器学习技术则依据视觉信息,高效地计算相关信息,从而更好完成拆回电能表的管理[6-7]。文献[8]采用自适应设定阈值,引入权重调整分配权值,提取电能表故障影响因素,并关联性分析,该方法对提高电能表检定性能具有一定帮助,但是其存在识别误差较高的问题;文献[9]重点分析电能表数据,基于机器学习建立电能表供电模型,有效完成了电能表故障测试,对于电能表全寿命周期管理具有重要作用,但是该方法的运行时间较长;文献[10]主要通过机器学习计算电能表台区归属的概率分布,寻找最优途径识别台区,但是该方法的耗时偏长。由此可知,传统的方法均或多或少地存在不足之处,如算法运行时间较长、计算难度过大和容易出现计算准确率较低的现象等。
为提高拆回电能表应用性能,解决现有方法存在的不足,本文设计一种双目视觉和机器学习的拆回电能表污渍清洗系统,并通过实验验证该系统的有效性。
1 拆回电能表污渍清洗系统
本文的拆回电能表污渍清洗系统主要依靠双目视觉和机器学习技术实现[11-12],由控制中心统一指挥,并且通过双目视觉和机器学习对拆回电能表的污渍进行识别和数据运算,进而利用通信协议连接清洗服务模块,控制微颗粒模块通过高压气流完成拆回电能表微颗粒表面污渍的自动清洗工作。系统设计如图1所示。
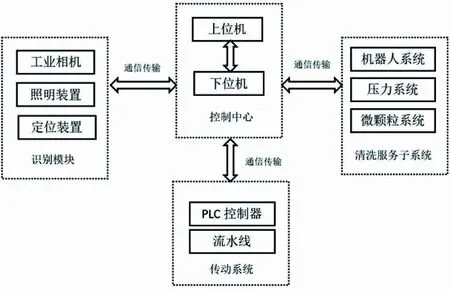
图 1 拆回电能表微颗粒清洗系统Fig.1 The microparticle cleaning system of disassembled electric energy meter
从图1可以看出,该系统主要由控制中心、传动系统、识别模块和清洗服务子系统组成。
1) 控制中心。控制中心是系统核心,依据任务分配和功能设计对各模块发出工作指令,协调各模块数据处理等工作,完成拆回电能表污渍清洗工作[13-14]。控制中心分为上位机和下位机2部分,上位机主要为计算机操作控制系统,通过通信协议连接识别模块,获取拆回电能表颗粒物的信息,同时,分解数据反馈至清洗服务子系统[15-16]。下位机为逻辑控制器,接收上位机指令,获取系统设备反馈信息,处理信息,并上传至服务器[17-18]。
2) 传动系统。传动系统用于拆回表的工位转运,将拆回表依次运输并定位到视觉识别工位、清洗工位、下料区工位,其由PLC控制配合传感器,并接受控制中心的指令,通过气动系统实现对拆回表的传输。
3) 识别模块。识别模块由工业相机、照明、定位装置等组成。在清洗电能表污渍之前,通过双目视觉与机器学习相结合的方法识别污渍,并在识别模块安置传动系统,依次连续检测不同拆回电能表,保障多个电能表依次完成污渍识别和清洗。考虑到双目视觉系统在采集电能表信息过程中,可能受到外界光线的影响,因此,在识别模块中采用专用照明系统,以此降低外界的干扰。当双目视觉系统工作时,定位装置自动抬升,以保证拆回电能表视觉识别过程的准确性。当完成识别拆回电能后,抬升装置自动下降,传动系统启动,传送电能表[19-20],识别模块通过图像识别算法确定电表表面的污渍分布和污渍类别,以此作为清洗子系统清洗的依据。
4) 清洗服务子系统。清洗服务子系统包括机器人系统、压力系统、微颗粒控制系统等。通过识别模块的分析数据,控制中心将数据发送机器人系统,机器人获得污渍分布位置后,远程设定微颗粒产生器的干冰研磨微颗粒的粒度,由机器人通过固定在机器臂上的高压喷口,通过控制运动位置、运动速度、喷射角度实现对表面污渍准确高效地清理。
2 双目视觉和机器学习的污渍清洗
依据系统框架结构可知,系统设计过程中,首先基于双目视觉和机器学习完成污渍识别,然后通过控制中心下达指令,清洗装置通过高速干冰微颗粒实现拆回电能表污渍清洗服务。因此本文重点分析污渍识别和微颗粒清洗过程。
2.1 双目视觉的目标污渍定位
双目视觉系统从2个不同角度采集同一物体摄影图像,根据视差计算,并确定最佳观察点,提高计算精确度,同时双目视觉系统具有易操作和较强抗干扰性的优势,被广泛应用于目标识别和检测领域。利用双目视觉系统进行拆回电能表污渍目标定位具体过程如下。
由于双目视觉系统构建中可能因曝光不足的针孔畸变或透镜畸变问题,导致定位效果不佳,因此,需要双目摄像机标定。本文以神经网络为依据,选取若干组数据点作为标定点输入到训练完成的神经网络中,通过神经网络计算以及权值赋予等步骤输出图像坐标,实现双目摄像机标定。标定完成后,通过双目摄像机进行拆回电能表污渍图像信息采集和处理[21-22]。
假设摄像机坐标系为XYZ,世界坐标系为X′Y′Z′,摄像机光轴与成像空间交点的齐坐标形式表示为A(x,y,z,1),在世界坐标系中表示为B(x′,y′,z′,1),则两者之间的关系可表示为
(1)
式中:F为转换矩阵。
(2)
式中:H1×3为摄像机坐标系与世界坐标系转换的旋转矩阵;g1×3为摄像机坐标系与世界坐标系转换的偏移向量。
由此计算双目摄像机在左右方向的视差sL和sR,完成双目视觉差异计算:
(3)
依据上述坐标转换以及视差计算,可完成定位拆回电能表的目标污渍。
2.2 机器学习的污渍识别
机器学习包含深度学习和半监督学习等多种技术,卷积神经网络是一种典型的深度学习方法,可自主完成数据特征提取,具有较强的网络泛化能力和数据处理能力[23-24]。本文基于卷积神经网络识别拆回电能表污渍,共分为输入层、卷积层、池化层、全连接层和输出层等部分,将双目视觉系统定位完成的图像信息输入神经网络,划分神经元网格,生成像素检测区域,从而通过神经元计算区域网格数据提取污渍特征,映射到多维空间生成特征图,采用神经网络的全连接层与支持向量机相结合的方式分类处理污渍[25],分类后对数据归一化处理,实现污渍目标识别。卷积神经网络识别流程如图2所示。

图 2 卷积神经网络识别流程Fig.2 Identification process of convolutional neural network
2.3 拆回电能表污渍清洗子系统
拆回电能表污渍清洗子系统中设计清洗装置,其主要由空气压缩机、干冰研磨机、干冰喷枪、机器人、除尘风扇、粉尘收集箱等组成,干冰喷枪固定于机器人的机器臂上,清洗介质采用颗粒状干冰。清洗装置结构如图3所示。
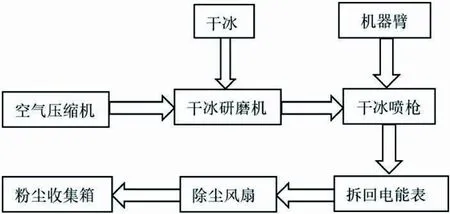
图 3 清洗装置结构Fig.3 Structure of cleaning device
图3中,启动清洗装置后,当拆回电能表到达指定工位,机器臂带动干冰喷枪到达指定位置,然后打开干冰喷枪,同时干冰研磨机运行对干冰进行研磨,将干冰研磨成要求尺寸的颗粒。空气压缩机持续工作提供高压气体输出,将研磨后的颗粒通过喷枪打到电表表面。根据主控系统发送的电表类型、污渍分布矩阵、污渍类型,由机器臂带动喷枪,设定所需速度、距离、角度,针对污渍进行高压喷射。清洗子系统由透明防护罩保护,防止高压高速干冰对外部人员及设备造成损伤。被清洗下来的污渍残渣会残留在防护罩内,通过启动除尘风扇,将残渣及粉尘吹入清洗工位下方的粉尘收集箱,完成完整的电表清洗工作。
综合以上模块分析,完成双目视觉和机器学习的拆回电能表污渍清洗系统设计。
3 结果与分析
为验证本文设计的拆回电能表污渍清洗系统的有效性,设计实验进行系统测试。实验采用Windows10操作系统,配置caffe深度学习框架,为提高目标识别效率,在GPU加速环境下开展实验。控制中心采用i7 6700K处理器,双目立体视觉的摄像头采用东芝TELI CCD相机,显示器像素分辨率为1 024×768。
将某地区多家电力公司共计500只拆回电能表作为实验研究对象,利用本文系统进行拆回电能表污渍清洗,并对比其他文献方法,验证本文设计系统性能。利用微粒检测仪对500只电能表进行处理,然后利用本文系统或其余对比系统进行检测,待一个系统检测完毕后,重新对电能表进行处理,利用污渍检测仪检测,供另一个系统实验,选取的实验指标:系统耗时;系统识别误差(提前处理待检测的电能表,确定污渍的数目,并且与其系统检测数目进行对比,确定识别误差);电能表污渍清洗前后的平均检定效率。
3.1 系统耗时
由于电力行业的快速发展以及电能表的广泛应用,实际应用中拆回电能表数量庞大,那么拆回电能表污渍清洗系统则需要具备快速运行的特征,以提高拆回电能表的处理效率,因此,将系统耗时作为指标,验证本文系统性能,对比结果见表1。
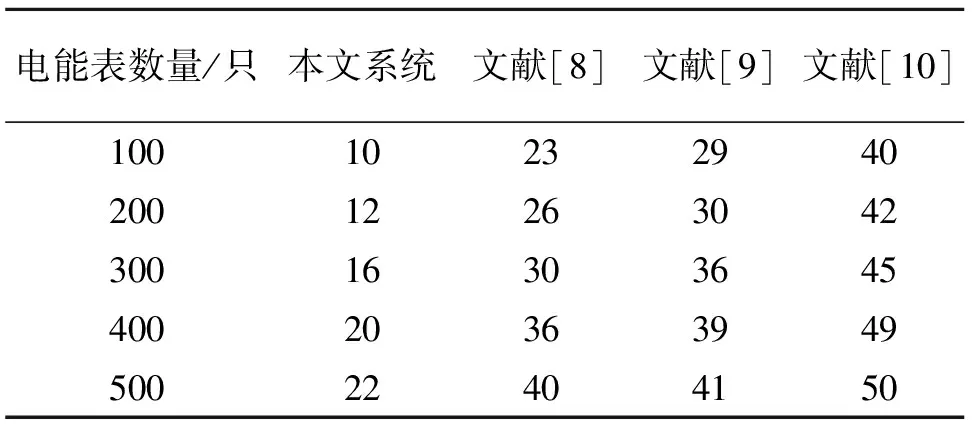
表 1 系统耗时对比
从表1可看出,随着拆回电能表数量的增加,4种系统的运行耗时随之增加,但是本文系统相较于文献[8]、文献[9]和文献[10]的系统,明显缩短了运行耗时,在拆回电能表数量增加至500只时,本文系统的运行耗时仅为22 min。由此证明,本文采用微颗粒模式的系统对于数量巨大的拆回电能表清洗具有较强的处理功能。
3.2 系统识别误差
本文在设计拆回电能表污渍清洗系统过程中,先基于双目视觉和机器学习完成污渍识别,将其作为实现清洗工作的基础工作,因此,污渍识别误差的大小将直接决定清洗结果的准确率。为保证系统清洗质量,对比分析本文系统与文献[8]、文献[9]和文献[10]系统的识别误差,结果如图4所示。

图 4 系统识别误差对比Fig.4 Comparison of system identification errors
从图4可以看出,本文系统的识别误差较小,识别误差稳定在10%附近。而文献[8]、文献[9]和文献[10]系统的误差较大,最低误差在15%以上,且在70次实验过程中,误差折线出现上下无规律波动,表明系统运行的稳定性不佳。因此,本文系统充分体现出了双目视觉和机器学习相结合的优势,能够准确完成拆回电能表的视觉定位和污渍识别,降低了识别误差。
3.3 平均检定效率
电能表是一种检定器具,检定效率为体现电能表质量的关键指标,因此,针对拆回电能表可能受到灰尘、水雾等污渍影响,降低检定效率的问题,本文设计了拆回电能表污渍清洗系统,以期保障电能表的清洗效果。若清洗后的拆回电能表的检定效率得到提高,则验证本文系统的有效性。目标状态为理想状态,即根据GB 1208—2006规定的精度等级。本文采用5%额定电流,1.0准确级的电能表。清洗前和清洗后拆回电能表的平均检定效率对比如图5所示。
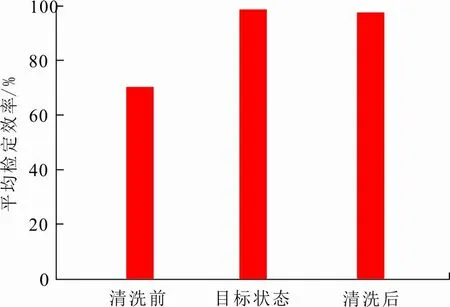
图 5 拆回电能表污渍清洗前后平均 检定效率对比Fig.5 Comparison of average verification efficiency before and after cleaning of micro particles in the dismantled electricity meter
从图5可以看出,清洗前拆回电能表的平均检定效率较低,仅为70%,清洗后的值为97%,平均检定效率基本达到目标状态。由此验证了本文系统的清洗效果得到了提升,具有一定的实际应用价值。
4 结 语
针对拆回电能表顽固污渍清洗效率的问题,本文设计了双目视觉和机器学习的污渍清洗系统。首先,采用双目摄像机获取拆回电能表的图像信息,定位污渍的位置。然后,将定位结果作为基础数据,输入卷积神经网络,完成污渍识别,以识别结果为依据,实现通过控制干冰微颗粒粒度,通过高压气流进行定点清洗,避免了传统清洗系统清洗效率低,清洗速度慢和对顽固污清洗效果不佳的问题。经实验测试,在拆回电能表数量增加至500只时,本文设计的清洗系统耗时仅为22 min,系统清洗效果大幅提升,并且利用本文系统清洗后的电能表平均检定效率约为97%,能够达到目标状态。因此,本文系统降低了识别误差,提高了检定效率,具有较好的应用性,为拆回电能表的准确计量和管理提供了一定的数据基础。
猜你喜欢
阅读(科学探秘)(2023年12期)2024-01-22 03:04:13
好日子(2021年8期)2021-11-04 09:02:54
散文诗(青年版)(2021年5期)2021-07-11 03:20:07
电子制作(2019年20期)2019-12-04 03:51:38
小雪花·成长指南(2017年5期)2017-06-07 01:47:00
现代计算机(2016年11期)2016-02-28 18:35:20
科技知识动漫(2016年1期)2016-01-27 20:44:31
少年科学(2015年8期)2015-08-13 04:04:36
机械与电子(2014年2期)2014-02-28 02:07:46
中国洗涤用品工业(2011年6期)2011-03-20 15:39:03