
无人机新型撞网回收系统设计与数值仿真
2022-05-09 03:19:24闫兆武
兵器装备工程学报 2022年4期
蔡 亮,闫兆武
(1.南昌航空大学 飞行器工程学院, 南昌 330063; 2.南昌航空大学 通航学院, 南昌 330063)
1 引言
无人机是指无人驾驶的飞行器,没有飞行员或者乘客,可以进行遥控驾驶或预先编程以自动飞行。无人机近些年发展迅猛,以其隐蔽能力强、生存能力强、造价低廉、不惧伤亡的特点受到了军事和边境的青睐,被广泛应用于提供情报,监视,目标获取和侦察等任务。
无人机在军事上应用比较广泛,而近几年随着无人机的发展,其在民用公共领域应用场景也越来越多越多。根据国际无人驾驶系统协会(AUVSI)对美国无人机民用领域应用的一项调查,无人飞行器行业的前三大应用是建筑,基础设施和农业。这也表明无人机在各领域应用越来越广泛,承担的任务也越来越重,其所携带的设备精密程度也越来越高,所以做到安全回收对于无人机的使用至关重要。
无人机的回收方式在选择时受多个因素的影响,其中包括无人机自身重量、工作场合、用途、成本等限制。现阶段无人机回收方式主要有撞线回收、伞降式回收、撞网回收、跑道滑跑式回收、机腹擦地式回收、阻拦索回收、空中回收、气囊着陆回收。
其中,无人机撞网回收技术比较成熟,简单有效,但是撞网回收系统的难点在于无人机撞网时阻尼装置的设计,在降低成本的同时,选择合适的阻尼装置对于安全回收无人机至关重要。撞网回收可以实现无人机零距离回收,这对于在山区、舰船、战场或者其他没有广阔场地的地方回收无人机具有非常重要的意义。
撞网回收是无人机通过碰撞柔性阻拦网,从而进行减速回收的一种方式。其中阻拦网在受力时呈现出非线性特点,难以建立准确的数学模型,而采用非线性仿真工具,运用有限元思想,可以很好地描述柔性网的非线性特性,从而更准确的描述无人机撞网过程。万佳宁等在ANSYS/LS-DYNA中用LINK167缆单元对警用网枪所用的柔性网进行了建模和动力学仿真,仿真结果与实验结果相吻合。胡晓楠等在ANSYS/LS-DYNA中采用LINK167缆单元建立柔性绳索模型,并且实现了单根柔性绳索在空气阻力作用下的动力学仿真,仿真结果与实验结果有较高的一致性,证明了仿真方法的有效性。曹强等基于有限元法,在ANSYS/LS-DYNA中用LINK167单元对具有非线性特性的柔性网进行仿真建模,动态模拟了其弹射飞行过程,与实物实验结果相吻合。朱超等在ANSYS/LS-DYNA中运用LINK167缆单元对柔性网进行有限元建模,并且模拟了旋转柔性网与刚体目标之间的碰撞等非线性接触问题。
无人机撞网回收可按照按拦阻网和立网支架的数量不同划分,可分为以下几种方案:单网单杆、单网双杆、单网三杆、双网双杆。褚永康、文登等在其设计的单网三杆撞网回收系统中运用了涡轮阻尼器来降低回收无人机时的峰值过载。金泉等在其设计的单网双杆撞网装置中运用自行车刹车阻尼系统来降低无人机的峰值过载。
本文旨在通过设计一种新型的L形网阻力伞撞网回收装置,将无人机入网后,利用柔性网和阻力伞控制无人机撞网后的最大过载,以保护无人机及其携带的精密仪器和设备。
2 L形网阻力伞撞网回收系统设计
无人机撞网回收系统降低无人机回收过程中峰值过载的途径一般有2种:① 依靠网自身的吸能缓冲特性来降低回收过程中的峰值过载。② 利用自行车刹车、涡轮阻尼器等附加阻尼装置降低峰值过载。途径②相较于①回收效果较好,但现有如涡轮阻尼器等附加装置结构复杂、成本较高、稳定性差。L形网阻力伞撞网回收系统利用阻力伞的空气阻力特性和阻拦网的吸能缓冲特性来作为撞网回收装置的阻尼,在结构和原理上对撞网回收系统进行创新设计,以求达到降低峰值过载、平稳的回收效果。
如图1所示,回收装置主要由立柱3和5、钢索2和7、回收网8、阻力伞1、钢环4以及钢索尾端的缓冲阻尼装置6组成。其中4根立柱和钢索组成回收系统的整个框架。4根立柱分别由钢索连接和固定,回收网整体形状呈L形,回收网与钢索由6个钢环连接在4根钢索上,回收网通过橡筋连接在钢环上。网垂直面的四角分别带有伞包,伞包中放置有阻力伞,钢索末端装有橡胶缓冲垫。
在三维建模软件中建立撞网回收装置的数字化模型,如图1所示。
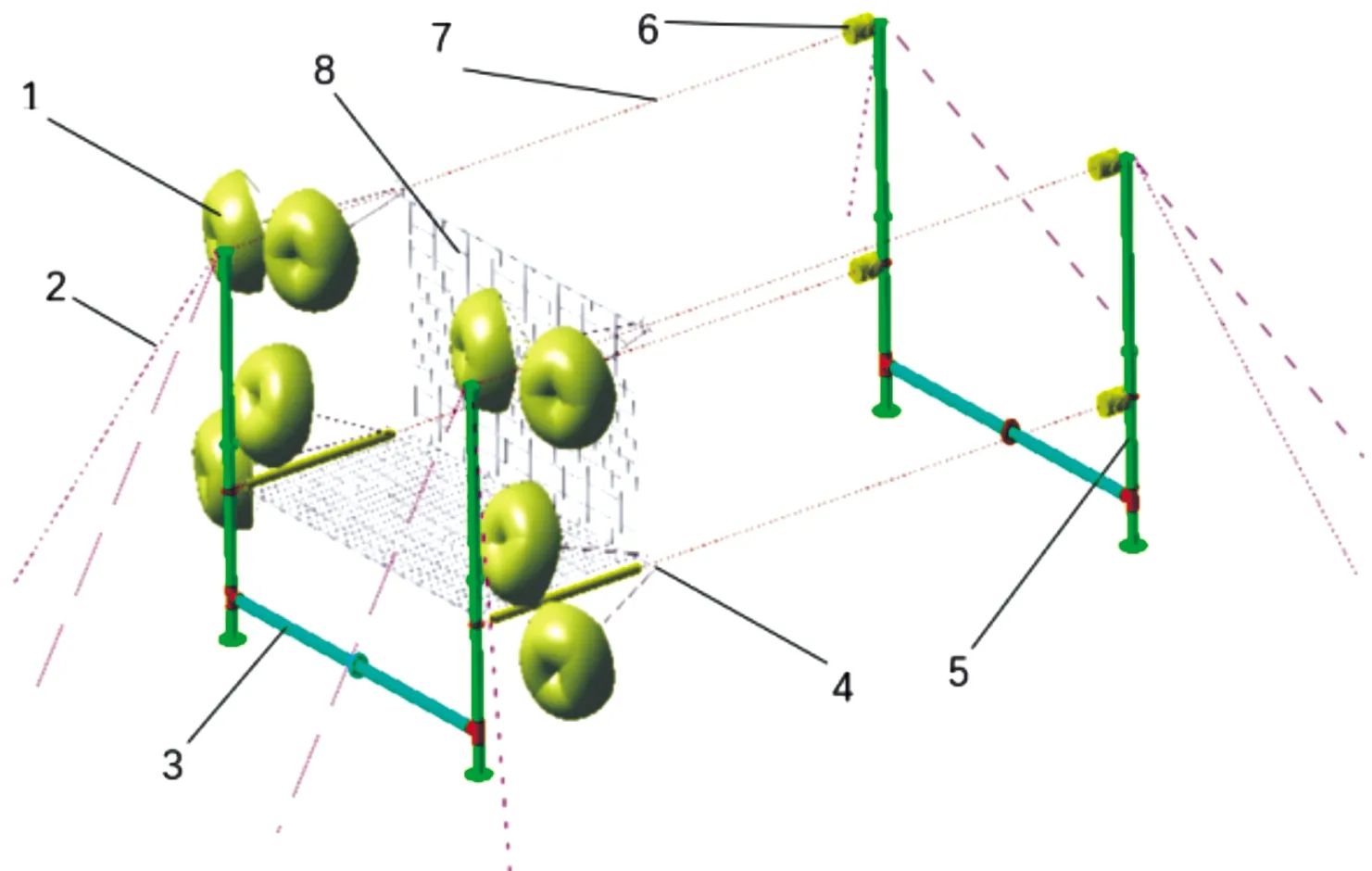
图1 撞网回收系统模型示意图
无人机在回收时首先接触到阻拦网,并迅速地和阻拦网系统共速。共速前位于L形网4角位置的阻力伞,被迅速拉出,为无人机和网组成的系统提供阻尼力。无人机与网组成的整体迅速减速,经过2 s左右,无人机和网组成的整体触碰到钢索末端的阻尼装置,整体速度降至0,回收过程完成。
3 无人机回收过程动力学建模
由于无人机在撞网后,与网一直保持紧密接触,故而这个过程可以看作是完全非弹性碰撞,而且由于无人机撞网时间非常短暂,故而整个系统遵循动量守恒。设无人机速度方向为正向,则有:
=(++)
(1)
式中:为无人机的质量;为网的质量;为钢环以及伞包的总质量;为无人机撞网前速度;为撞网后整体的速度。
无人机在回收过程中所受到的阻尼力分为3个阶段。
3.1 阶段一阻尼
此阶段中主要由阻拦网提供阻尼力。此过程为无人机撞向阻拦网,并迅速达到共速。阻拦网由于无人机的撞击,会发生变形并产生阻尼力。无人机近似为刚性球体,所以可将无人机与网的碰撞近似成为刚性球体与柔性网之间的碰撞,在ANSYS/LS-DYNA中建立有限元模型,无人机简化为刚性球体,用LINK167缆单元模拟阻拦网。在ANSYS/LS-DYNA中建立模型如图2所示。
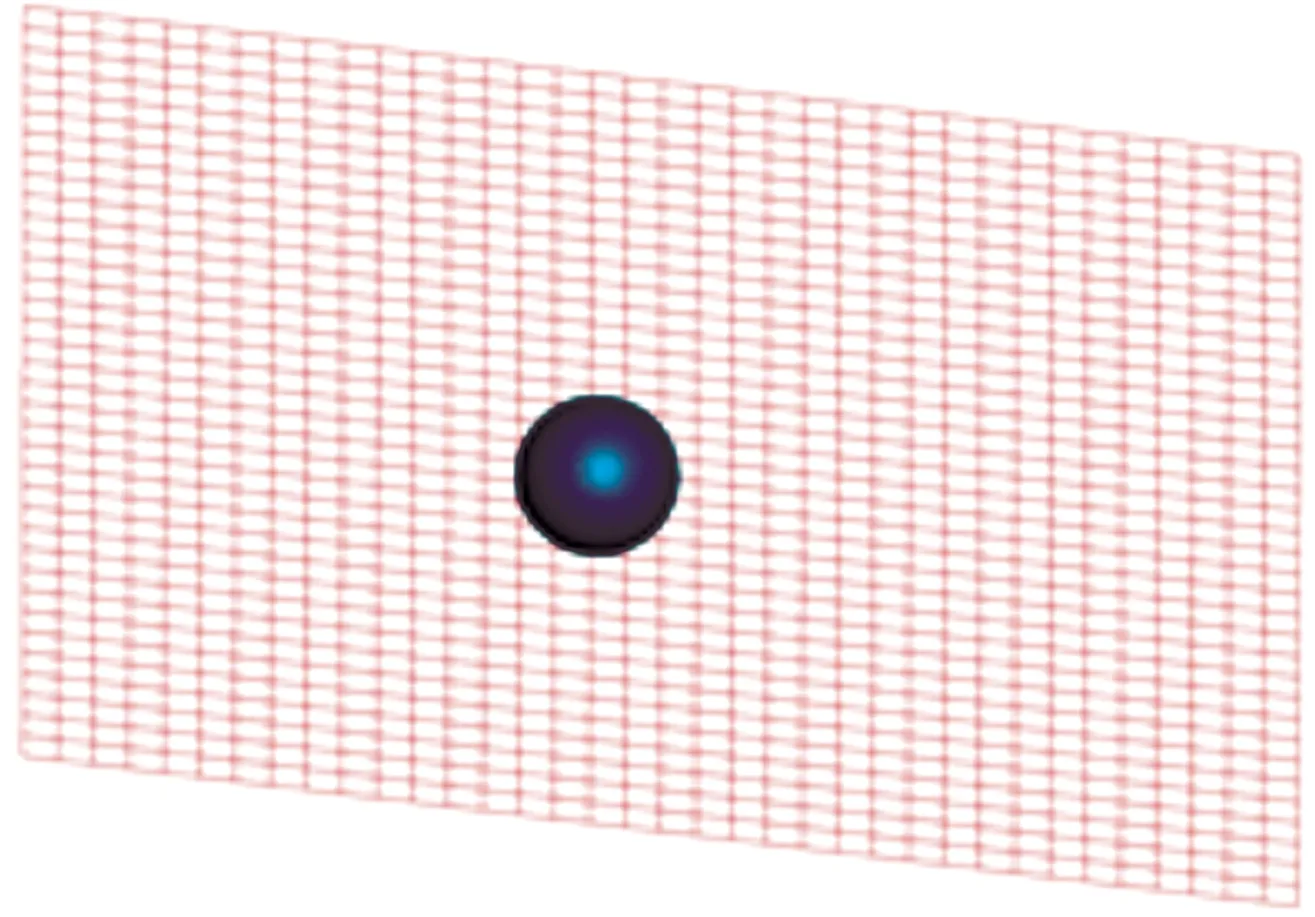
图2 刚性球和绳网模型示意图
在模型中将无人机近似为直径为0.15 m,质量为25 kg的刚性球,以30 m/s的速度与阻拦网相撞,阻拦网4个角固定。阻拦网的尺寸为长6 m,宽3 m。阻拦网的弹性模量为1.2×10Pa。
3.2 阶段二阻尼
阻力伞的阻尼力由空气阻力产生。阻力伞在开伞过程中,伞结构会在充气阶段受到冲击载荷。冲击载荷主要在充气阶段产生。系统整体在撞网后由阻力伞提供阻尼力,而其中阻力伞的空气阻力随着整体速度的减小而变小,故在整个回收过程中阻力、速度、加速度都在变化。
开伞动载:
(2)
式中:为开伞速度;动载系数,此处取1.5;开伞动载缩减系数,此处取0.33;为开伞动载不均匀系数,此处取1.45。
根据牛顿第二定律可有:
(3)
式中:
=++
阻力伞在某时刻的阻力:
(4)
式中:为所选取阻力伞的阻力系数;为空气密度;为阻力伞面积;为阻力伞在时刻的速度。
结合式(3)、式(4)两个式子可有:
(5)
回收系统在某时刻的速度:
+1=-d
(6)
由式(3)、式(4)、式(6)可得

(7)
由式(8)结合位移定义可得回收过程的位移:
(8)
3.3 阶段三阻尼
第3阶段阻尼力由阻力伞的空气阻力和钢索尾端的的橡胶缓冲垫提供。阻力伞的阻力随着速度的减小而慢慢变小,系统接触到末端的阻尼缓冲垫,回收系统的速度降至0,回收结束。橡胶缓冲垫可以为阻拦网系统提供很好地缓冲,可以让整个系统实现“软制动”,从而更好地保护无人机。
故此时对于系统有:
(9)
其中:为橡胶缓冲垫提供的阻尼力。
将式(14)代入式(10)可得:

(10)
4 数据仿真与分析
4.1 阶段一仿真结果与分析
第一阶段是无人机和柔性网进行碰撞,在ANSYS/LS-DYNA中建有限元模型后,设置完关键词后将其保存为k文件,将k文件提交至LS-DYNA manager解算器进行仿真计算。仿真核数设置4,然后等待计算结果完成,仿真完成后,用LS-PrePost查看结果,结果中可以看到模拟的小球与网碰撞时各个时刻的变形,以及小球在与网相撞方向的过载。仿真过程中几个不同时刻的接触状态以及碰撞方向上的过载如图3、图4所示。
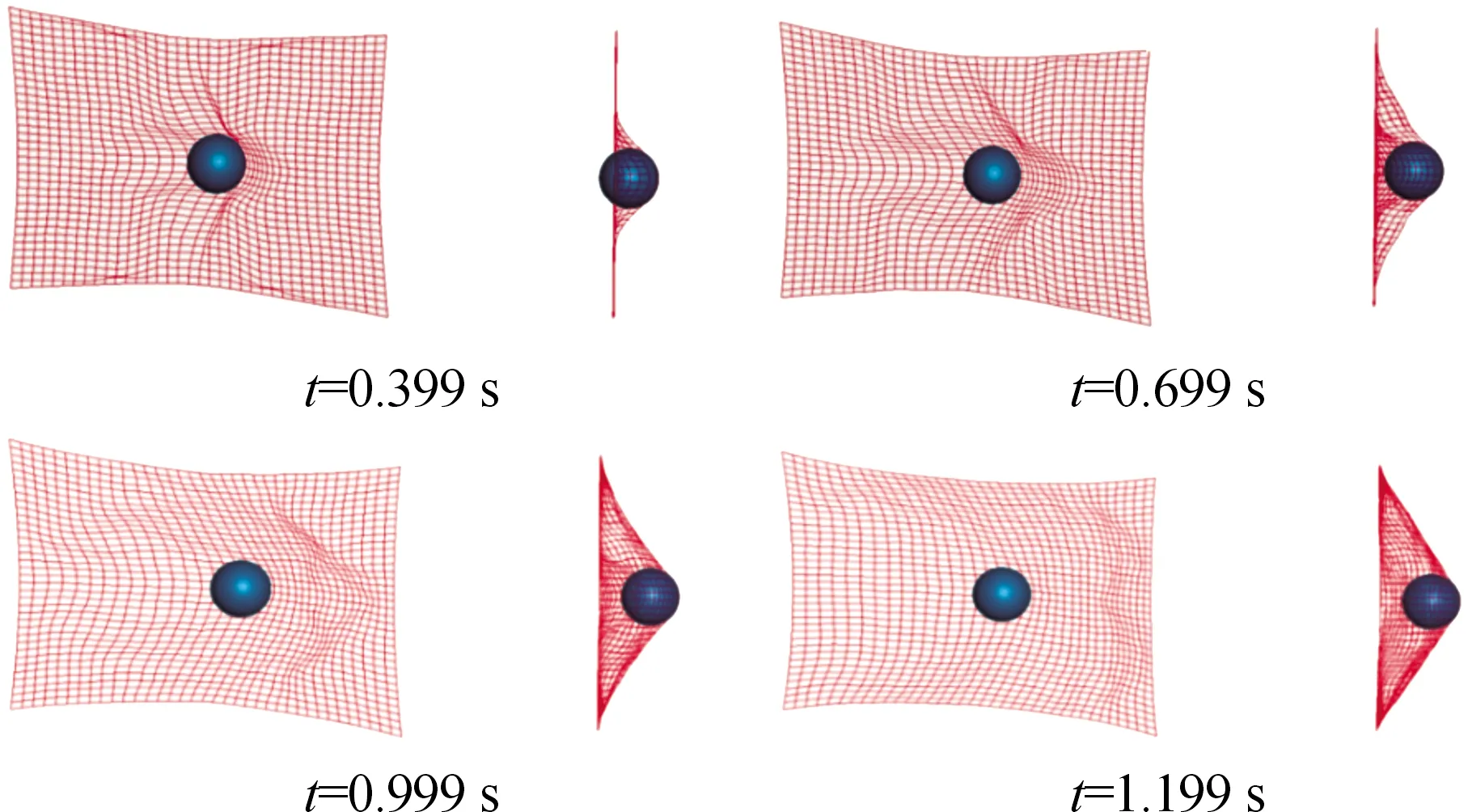
图3 不同时刻接触状态图

图4 刚性球不同时刻过载曲线
由图4可以看到当阻拦网4角为固定状态时,刚性小球与阻拦网在0.72 s开始接触,到1.63 s时过载达到最大,无人机在回收过程中的峰值过载约为6.1 g。
4.2 阶段二仿真与结果分析
阻力伞充满的时间特别短暂,一般在10~100 ms。阻力伞在共速前某时刻开伞,开伞速度为共速速度,开伞动载持续时间为30 ms。阻力伞产生开伞动载时,根据阶段一的仿真结果,当无人机所受到的阻力大于1 989 N时,阻拦网的吸能缓冲可将无人机的过载控制在6.1 g以内。阶段二对阻力伞的回收过程动力学仿真参数如表1所示。
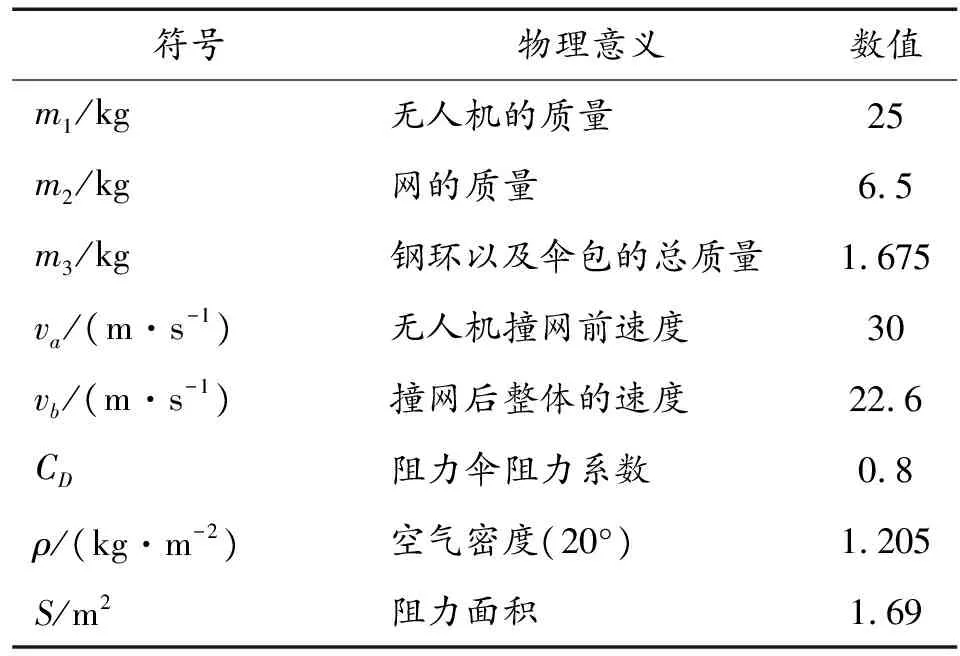
表1 无人机回收系统参数Table 1 Parameters of UAV recovery system
无人机与回收网碰撞后,回收网整体所受的力为阻力伞的空气阻力:
=
根据阶段一撞网仿真结果以及阶段二所建立的阻力伞动力学模型图5在Matlab/Simulink环境下进行仿真运算,可得到无人机撞网回收整个过程的速度、位移以及过载变化结果如图6所示。
图6(a)是阻力伞开伞后的阻力曲线,开伞动载持续时间约为30 ms,阻力在开伞动载阶段阻力维持在5 196 N以上,此阶段无人机会产生回收过程中的最大过载,而回收网是一个吸能缓冲的耗散系统,所以根据阶段一撞网仿真模拟所得结论,可将开伞动载期间的阻力控制在1 989 N以内,如图6(b)的曲线所示。图6(a)、(b)的阻力曲线在降低到30 N后陡增到753 N时,对应的是回收网系统碰撞到钢索末端的橡胶缓冲垫,迅速制动时的状态。
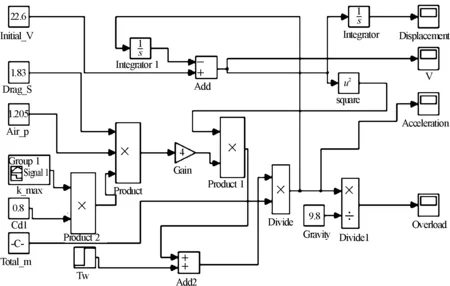
图5 Simulink仿真模型示意图
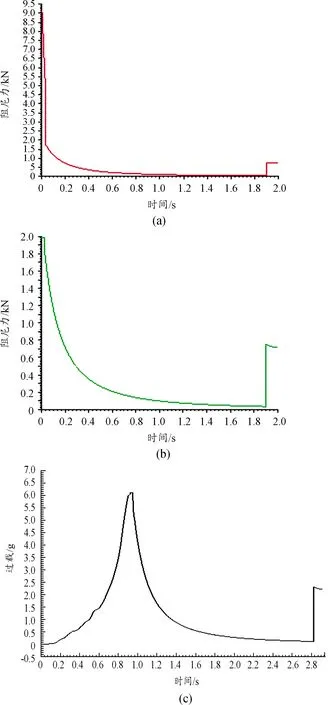
图6 回收过程阻力过载曲线Fig.6 UAV net-recovery drag force and overload
图6中是无人机的回收过载曲线。在回收过载曲线图中,可以看出无人机的最大回收过载为6.1 g,产生于阻力伞开伞动载产生阶段,随后无人机的过载逐渐下降,由于此过程阻尼力由阻力伞的空气阻力提供,而阻力伞的阻尼力又随整体的速度降低而降低,所以整体的合外力迅速减小,过载亦迅速减小。系统接触到钢索尾端的橡胶缓冲垫,速度迅速降为0,会出现瞬时的过载增加。
图7中的速度刚开始出现了陡降,这是由于阻力伞开伞瞬间产生了开伞动载,阻力迅速增加。回收过程中系统速度随阻力伞阻尼力减小而减小,直到无人机与网组成的系统接触到钢索尾端的橡胶缓冲垫,对应图中速度的拐点,随后速度迅速降为0,无人机位移可由速度为零时得到,整个回收行程大约为10 m。
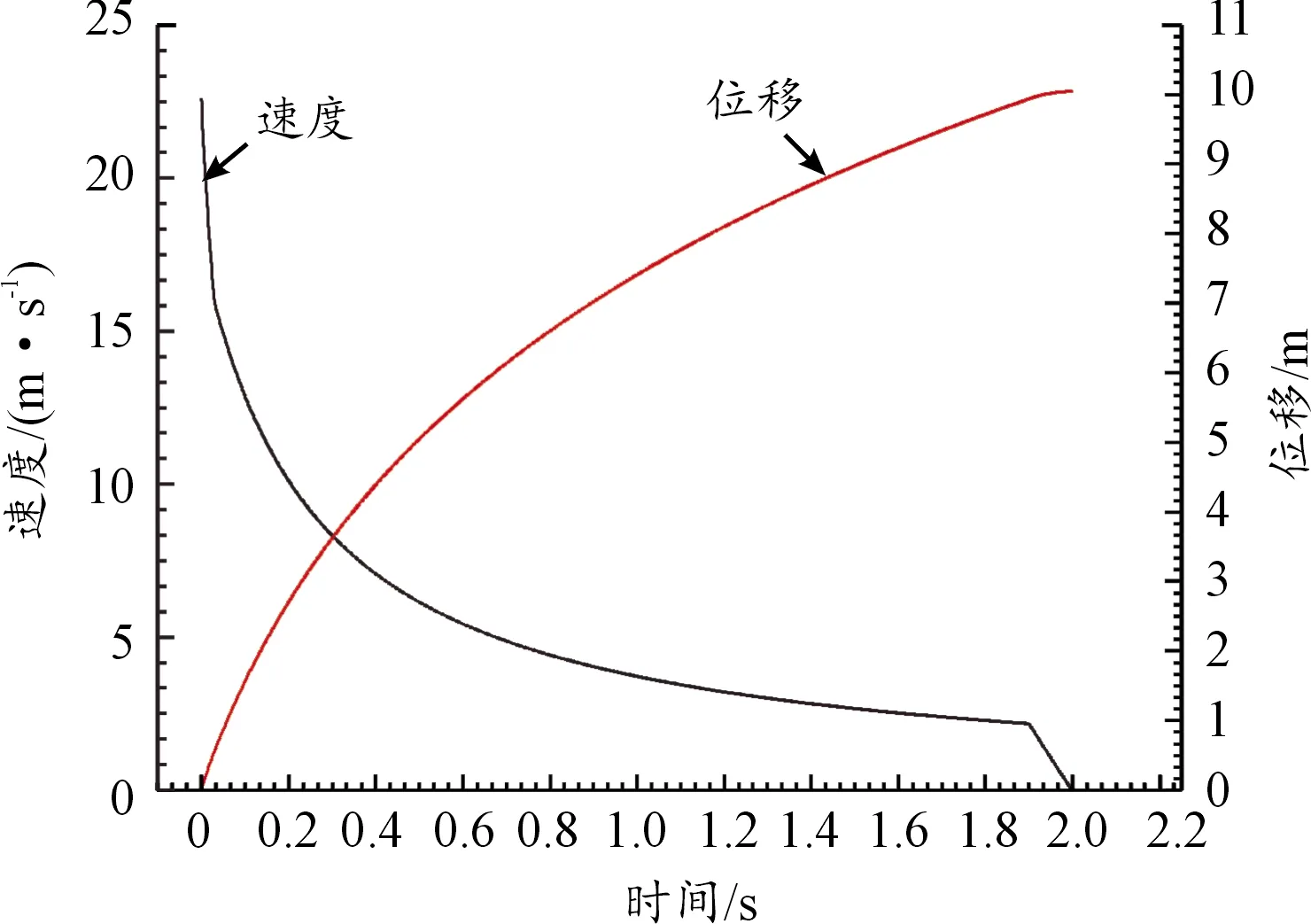
图7 无人机回收速度位移曲线
5 结论
本文从无人机撞网回收装置阻尼力的角度、减小回收过程中的过载以及装置成本的角度出发,对无人机撞网回收装置进行了创新设计,建立了撞网回收装置的三维数字化模型,并进行动力学建模和数字化仿真。可得到结论如下:
1) 本装置结构简单、易操作,能够实现快速拆装,满足小型固定翼无人机的回收需要。
2) 仿真以25 kg固定翼无人机为研究对象,设定以 30 m/s的速度进行撞网回收,柔性网和系统使用的8个阻力面积为1.69 m阻力伞,回收过程中无人机的峰值过载为 6.1,回收距离约为10 m。能够实现快速平稳回收。
3) 回收过载与回收距离与阻力伞的的阻力面积和数量分别成反相关和正相关。后续可针对不同重量类型的无人机调整阻力伞阻力面积和数量。结合调整阻力伞的位置关系,实现低过载或快速回收。
猜你喜欢
郑州大学学报(工学版)(2023年6期)2023-10-26 08:35:28
疯狂英语·初中天地(2022年9期)2022-08-29 13:58:34
数学物理学报(2021年3期)2021-07-19 06:02:32
数学年刊A辑(中文版)(2021年2期)2021-07-17 08:38:02
数学物理学报(2021年2期)2021-06-09 08:54:38
北京理工大学学报(2020年11期)2020-12-15 04:55:50
上海公路(2017年1期)2017-07-21 13:38:33
小学生导刊(2017年22期)2017-07-19 13:41:46
数学物理学报(2016年6期)2016-04-16 04:41:06
石油化工建设(2015年6期)2015-12-01 04:17:31
