4自由度上肢康复机器人结构设计与仿真分析
2022-05-07 11:15蔡国庆周利杰
河北水利电力学院学报 2022年1期
蔡国庆,石 岩,周利杰,闫 明
(1.河北省工业机械手控制与可靠性技术创新中心,河北省沧州市黄河西路49号 061001;2.沧州市工业机械手控制与可靠性技术创新中心,河北省沧州市黄河西路49号 061001;3.河北水利电力学院机械工程系,河北省沧州市黄河西路49号 061001)
2012年至2018年,我国40岁以上的脑卒中标化患病率由1.89%升至2.32%,以此推断我国当前40岁以上脑卒中患病人数约为1318万[1]。而幸免于脑卒中的患者,大多会产生麻痹或者肢体无力的后遗症,进行康复运动训练能有效的降低肢体运动障碍[2]。而外骨骼康复机器人可以克服传统理疗时间和空间的局限,实现人机交互[3],并且具有灵活轻便的特点,与其他医疗设备相比优势明显[4]。
随着机器人技术的发展,国内外各研究机构逐渐将机器人应用到康复领域。美国亚利桑那州立大学研发的康复机器人能实现5个自由度的运动[5-7],帮助患者完成康复训练和进食等行动。日本筑波大学研发的HAL-SJ单关节辅助外骨骼[8],能实现肘关节0°~120°的运动[9],通过临床试验验证了其有效性[10]。与国外相比,我国康复机器人发展起步较晚。台湾大学研制了一款5自由度康复机器人,以气动肌肉驱动,节省了空间[11]。上海康复器械工程技术研究中心设计的康复机器人[12],可完成左右肢交换锻炼。上海交通大学栾晓燕研制出3自由度的机器人[13],实现了肩肘关节的运动,但忽视了对腕关节的康复训练。本文针对我国上肢康复机器人运动关节单一、复合运动程度较低的问题,设计了一款4自由度外骨骼上肢康复机器人,能够实现肩关节的屈伸和收展、肘关节屈伸、腕关节屈伸运动。通过对机器人模型进行运动学建模及仿真分析,验证了结构设计的合理性。
1 整体方案设计
1.1 自由度选取
根据对人体上肢解剖学结构分析,上肢从肩膀到腕部共有9个自由度,运动简图如图1所示。其中,p1、p2分别代表肩关节上下和前后方向的2个移动自由度;q3、q4、q5分别代表肩关节3个转动自由度,运动名称为屈伸、收展和内外旋;q6代表肘关节的屈伸运动;q7代表前臂的旋前旋后运动;q8、q9分别代表腕关节摆动运动和屈伸运动。考虑到外骨骼机器人穿戴空间有限性及近端关节对远端关节康复效果的影响,本文设计的外骨骼机器人可实现肩关节屈伸、收展,肘关节屈伸和腕关节屈伸4个自由度的运动,对应图1中的q3、q4、q6、q9关节。

图1 上肢运动简图Fig.1 Upper limb movement diagram
1.2 主要尺寸、功能参数选取
查阅我国人体尺寸标准GB 10000-88,以36~60岁成年男子、50百分位数为参考,选择与设计相关的尺寸参数,见表1。

表1 人体上肢尺寸参数
设定机器人上臂的基本长度L1为313mm,前臂的基本长度L2为235mm。为适用于不同体型的患者,增加臂长调节装置,调节余量为30mm。根据人体上肢日常活动情况,设定机器人每个关节实现的运动范围,见表2。
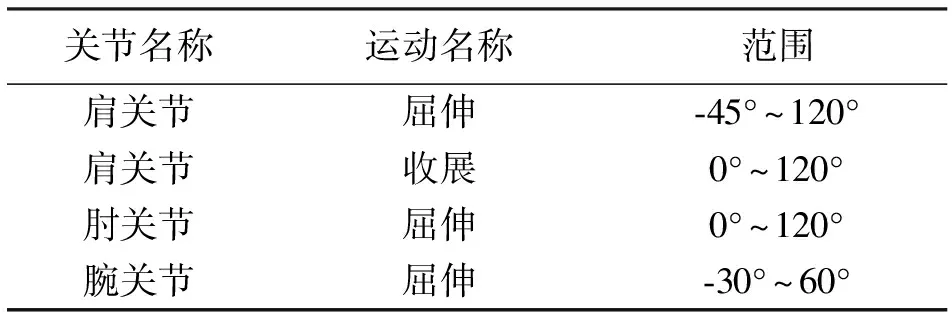
表2 关节运动范围
1.3 结构方案设计
由于外骨骼穿戴空间有限,同时兼顾各关节运动范围的实现,本文通过两组摇杆滑块机构来实现肩关节的屈伸和收展运动,两组电机配合减速器分别实现肘关节的屈伸运动和腕关节的屈伸运动。利用SolidWorks软件,建立了机器人的三维模型,如图2所示。
电机3输出转矩,通过丝杠5带动滑块4移动,滑块4通过连杆2带动摇杆1旋转,实现肩关节的屈伸运动;电机6置于摇杆1上,输出转矩,通过摇杆7和滑块8相连带动上臂连杆9转动,实现肩关节的收展运动;电机10与上臂连杆9固连,带动前臂连杆12旋转,实现肘关节的屈伸运动;电机13与前臂连杆12固连,带动握杆14旋转,实现腕关节的屈伸运动。同时,在上臂连杆9与前臂连杆12设置长度调节孔,以调节机器人整体尺寸,满足不同体型的患者使用。
2 运动学分析
2.1 运动学建模及验证
应用D-H法对图2的三维模型建立连杆坐标系,如图3所示,确定连杆长度ai-1、连杆转角αi-1、连杆偏距di、关节角θi等连杆参数,如表3所示。

图3 机器人连杆坐标系Fig.3 Connecting rod coordinate system of robot
根据表3中的连杆参数,按照相邻坐标系变换的链式法则,得到相邻连杆间的坐标变换矩阵的一般表达式,由式(1)表示:
(1)
(2)
式中:
nx=c1c2c3c4-c1c2s3s4-s1s3c4-s1c3s4
ny=s1c2c3c4-s1c2s3s4+c1s3c4-c1c3s4
nz=s2c3c4-s2s3s4
ox=-c1c2c3s4-c1c2s3c4+s1s3s4-s1c3c4
oy=-s1c2c3s4-s1c2s3c4-c1s3s4+c1c3c4
oz=-s2c3s4-s2s3c4
ax=-c1s2
ay=-s1s2
az=c2
px=c1c2c3l2-s1s3l2+c1c2l1
py=s1c2c3l2+c1s3l2+s1c2l1
pz=s2c3l2+s2l1
通过Matlab中机器人工具箱,对式(2)建立的机器人正向运动学解进行仿真验证。根据连杆参数,在机器人工具箱进行编程建模,取一般情况,令θ1=pi/2,θ2=pi/3,θ3=pi/4,θ4=pi/5,得到此配置下的位姿和正解(图4),结果与式(2)一致,验证了运动学模型的正确性。

图4 在θ1=pi/2,θ2=pi/3,θ3=pi/4,θ4=pi/5配置下的位姿Fig.4 Position and Posture of Robot When θ1=pi/2,θ2=pi/3,θ3=pi/4,θ4=pi/5
2.2 运动学仿真
将SolidWorks中绘制的三维模型导入Adams中,添加约束、驱动,建立运动仿真模型。零部件间设置碰撞约束,同时设置各关节角运动速度为ω1=ω2=ω3=20°/s,ω4=10°/s,完成机器人4个自由度极限角度的复合运动。在机器人手臂末端建立标记点Marker,进行运动仿真,记录Marker点在X、Y、Z三个方向的位移,如图5所示。机器人末端运行轨迹流畅连贯,并且不同部位之间不会发生干涉,验证了机器人在规定的关节角度范围内,能够完成肩关节收展、屈伸,肘关节和腕关节屈伸运动的康复训练。

图5 机器人末端运动轨迹Fig.5 Robot end trajectory
3 工作空间仿真分析
机器人工作空间的大小,直接影响使用者的康复训练效果,本文是基于蒙特卡罗法对4自由度康复机器人进行的工作空间分析的,其原理是:在给定的关节角度范围内,采用随机角度组合,通过建立正向运动学解来计算机器人末端在基坐标系中的位置,其所有位置的集合即构成了机器人的工作空间,由式3表示:
(3)
式中:w代表机器人的工作空间;[pxpypz]T为运动学正解中对应的位置变换矩阵;θi代表第i个关节;θimin与θimax代表第i个关节角的取值上下限。
应用Matlab中rand()函数及正向运动学模型对机器人工作空间进行编程求解,设定每个关节空间产生10000随机关节角,仿真运算得到机器人工作空间的三维云图和二维云图,如图6所示。通过云图表明设计的4自由度上肢康复机器人能够达到近乎半球形的工作空间,与人体上肢的日常活动工作空间是相匹配的,能够满足康复训练的需求。

(a)三维云图3D Cloud image

(b)XOZ平面云图b)Cloud image of XOZ

(c)XOY平面云图c)Cloud image of XOY

(d)YOZ平面云图d)Cloud image of YOZ
4 轨迹规划
以患者完成抬臂屈肘康复运动为例,对机器人轨迹进行规划分析。通过机器人运动学逆解得到机器人初始关节角度θs=[0 0 0 0]和期望位置关节角度θf=[-pi/2 pi/2 -pi/3 pi/5],应用Matlab中机器人工具箱中jtraj()函数,根据机器人始末关节角度进行五次多项式轨迹规划,设定患者完成一次抬臂屈肘康复运动的时间为3.1s,采样间隔为0.05s,进行仿真,得到机器人末端运动轨迹及各关节角的角度、角速度、角加速度的时间变化曲线,如图7所示。通过图7可以看出,利用五次多项式对关节空间进行规划,机器人的各个关节角的角度、角速度、角加速度的变化是连续的,整个康复运动过程平稳可靠。

图7 机器人末端运动轨迹及各关节角角度、角速度、角加速度变化曲线Fig.7 Change curve of motion trajectory, angle, angular velocity and angular acceleration
5 结论
设计了一种4自由度外骨骼上肢康复机器人,能够完成肩关节的屈伸和收展、肘关节屈伸、腕关节屈伸运动,并对机器人进行正向运动学建模,运用Matlab机器人工具箱验证了其正确性。同时,通过对机器人进行运动学、工作空间仿真分析和康复运动轨迹规划,证明康复机器人能在人体上肢的日常活动空间内实现多关节的复合康复运动,该成果为上肢康复训练机器人进一步的研究开发奠定了基础。
猜你喜欢
医学概论(2021年19期)2021-01-21
中华肩肘外科电子杂志(2020年1期)2020-12-20
河北省科学院学报(2020年1期)2020-05-25
中国临床医学影像杂志(2019年5期)2019-08-27
重型机械(2019年3期)2019-08-27
中国临床医学影像杂志(2019年4期)2019-06-18
中华肩肘外科电子杂志(2019年4期)2019-01-03
制造技术与机床(2018年11期)2018-11-23
中国医学装备(2016年6期)2016-12-01
中华肩肘外科电子杂志(2016年3期)2016-01-23