“嫦娥五号”发射及入轨段X频段测控任务设计
2022-05-06 12:10:58李海涛陈少伍李宇波
深空探测学报 2022年2期
李海涛,程 承,黄 磊,陈少伍,李宇波,强 立,康 凯
(1. 北京跟踪与通信技术研究所,北京100094;2. 中国卫星海上测控部,江阴 214431;3. 西安卫星测控中心,西安 710043)
引 言
探月工程三期“嫦娥五号”[1]任务于2020年11月24日凌晨4时30分发射升空,经过地月转移、环月飞行、动力下降、月面采样、月面起飞、月球轨道交会对接、环月等待、月地转移和再入回收等阶段[2],于2020年12月17日凌晨2时许返回内蒙古四子王旗着陆场,圆满完成了中国探月工程“绕”“落”“回”三步走目标。
“嫦娥五号”探测器由轨道器、上升器、着陆器和返回器组成,其中只有返回器采用S频段测控,且仅在返回段使用。前期从火箭发射、地月转移、月面采样以及月地转移等阶段探测器均采用X频段测控。“嫦娥五号”探测器采用“长征五号”(CZ-5)运载火箭发射。发射及入轨是“嫦娥五号”任务成功的第一步。CZ-5运载火箭采用窄窗口多轨道发射方案,共5条弹道[3-4],不同弹道存在一定差异。探测器采用X频段测控,相比S频段,X频段具有着增大测控距离、提高测量精度、避免无线电干扰等优势,但它也带来了地面天线波束更窄、频率动态范围更大、探测器接收机带宽更宽等挑战[5-7]。尤其在发射段,对探测器测控提出了更高的要求。因此在发射段测控总体设计时,需综合考虑“嫦娥五号”发射段运载火箭、探测器测控特点和难点,科学合理地设计,可靠保障发射及入轨段任务的实施。
1 “嫦娥五号”发射段测控任务分析
文昌发射场具有纬度较低、火箭发射安全性好和火箭运输便利等优势[8]。海南靠近中国最南部,火箭起飞后将很快飞出国境,地面测控资源较少,只能以测量船和中继卫星为主进行测控。为最大程度利用运载火箭的发射能力,“长征五号”采用窄窗口多轨道发射方案,发射当天共50 min发射窗口,每个发射弹道的窗口10 min[4],每个窗口的弹道均不相同,弹道散布随时间增大,给测控设备跟踪和测量船布设带来了挑战。此外,“嫦娥五号”任务相比以往“嫦娥”任务[9],首次在发射及入轨段全程采用X频段测控,天线波束在发射及入轨段仅为之前采用的S频段的1/4[10],由火箭高速运动导致的多普勒动态变化范围达到了± 200 kHz,对发射及入轨段的测控快速捕获提出了更高要求。
1.1 运载火箭测控要求及难点
CZ-5运载火箭是为满足中国航天发展对大运载能力的迫切需求而研制的新一代大型运载火箭,填补了中国大推力无毒无污染液体火箭的空白,使中国火箭技术水平和运载能力进入世界前列,是中国由航天大国迈向航天强国的重要标志[11]。“长征五号”系列运载火箭采用模块化设计方案,其中运载火箭总长约57 m,芯级采用了5 m直径箭体结构,捆绑4个3.35 m直径助推器,起飞重量约880 t,采用两级半构型,由结构系统、动力系统、电气系统和地面发射支持系统4大系统组成[4]。
发射段运载火箭采用窄窗口多轨道发射方案,以节省探测器在地月转移过程中的推进新消耗[3],每条发射弹道其散布会随着飞行时间的增加而逐渐扩大,火箭二级一次关机点和器箭分离点的散布如图1和图2所示。
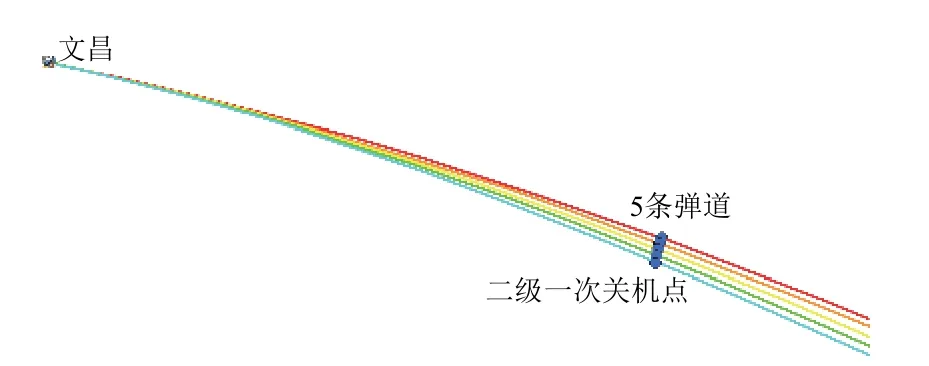
图1 二级一次关机前后弹道Fig. 1 Trajectory of stage-two turn-off
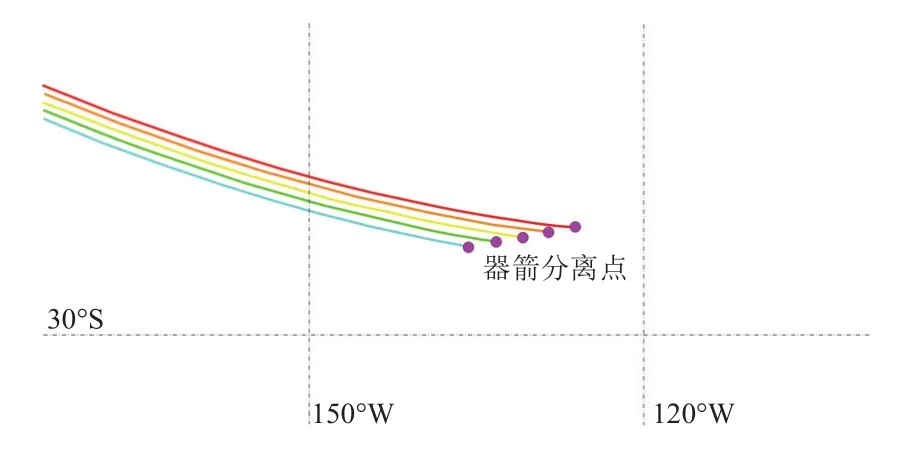
图2 器箭分离前弹道Fig. 2 Trajectory before rocket probe separation
发射段火箭测控主要满足火箭动力飞行期间的地面测控覆盖,重点监视运载火箭飞行状态及发动机工况。动力飞行主要包括火箭起飞至二级一次关机点和二级二次点火至器箭分离。
由于发射窗口时间窄,测量船机动范围很小可视为一个定点,在测量船位选择时,考虑在固定船位上兼顾图1和图2前后5条弹道测控要求,给出测量船的可布设范围,既能保证在该范围内满足测控要求,同时可布设范围不能太小,以保证测量船在遇到气象、海况和其它因素影响的情况下,仍能通过调整船位完成任务[12]。
1.2 探测器X频段测控要求
“嫦娥五号”探测器发射及入轨段测控系统需完成探测器遥测监视、应急处置、探测器初轨确定和器箭分离后阿根廷深空站的首次捕获跟踪等重要任务。深空测控工作频段如表1所示。

表1 深空测控工作频段Table 1 TT&C frequency band of deep space exploration
探测器X频段测控的难点在于频率域和空间域两方面的捕获。频率上,与S频段相比,X频段应答机的捕获带宽更宽[13],约为S频段的4倍,捕获所需时间更长,由火箭带来的动态多普勒(见图3)变化更大,动态范围为


图3 测量船多普勒示意图Fig. 3 Doppler of TT&C ship
其中:v为火箭相对测量船的径向飞行速度,飞向测量船(进站)速度为正,飞离测量船(出站)速度为负;c为光速;f为频率。
测量船布设在弹道一侧,火箭飞向测量船时多普勒为正,远离测量船时多普勒为负。进站时飞行方向与测量船视线方向夹角最小,图3中为40°,到航捷时夹角为90°,随后夹角又逐渐减小,出站时最小。
探测器为飞离地球到达月球,其器箭分离时速度需接近第二宇宙速度(11.2 km/s),预计进站时速度约10 km/s,径向飞行速度10 × cosθ≈ 7 km/s。发射段探测器的跟踪由测量船的X频段测控设备完成,最高发射频率f= 7 235 MHz,因此按照式(1),进站时多普勒频率168.8 kHz。出站时预计速度约11 km/s,径向飞行速度11 × cosθ≈ 7.7 km/s(夹角仍按40°),其出站时多普勒频率f= -185.7kHz,因此最大多普勒动态范围约± 200 kHz。
发射段每条测量船的测控弧段只有数百秒时间,短时间内需完成探测器的发现、捕获、跟踪、状态判断、应急指令发送和外弹道测量等一系列操作。空间上,测控天线3 dB半波束与频率和天线口径的关系[10]

其中:f为频率;D为天线直径。
由式(2)可知,在相同天线口径条件下,测量船X频段天线3 dB波束宽度仅为S频段的1/4。阿根廷深空站是入轨段主用测控站,拥有中国为探月工程三期新建的35 m口径深空测控设备,与佳木斯、喀什深空测控设备组成中国深空测控网[14],其口径比以往探月任务[15-17]中使用的18 m天线增加了近1倍,其下行信号接收能力和测控距离大大增加,但其波束宽度在相同频段下又只有原来的1/2,在频率和天线口径的双重影响下,阿根廷深空站35 m天线的捕获跟踪波束覆盖范围是以往探月任务18 m天线的1/8。此外,由于天线口径增加,其转动速度和目标搜索能力大幅下降,使得入轨段快速发现并捕获目标的难度进一步增加,因此,如何可靠保障阿根廷深空站对器箭分离后探测器的及时捕获跟踪是“嫦娥五号”任务的又一难点。
2 “嫦娥五号”发射及入轨段测控总体设计
2.1 测量船布设区域确定
测量船布设区域主要受测控几何可见性、测控链路、海况等条件约束。发射段火箭和探测器距离测量船较近,测控链路相关的发射功率、飞行姿态等在工程方案设计阶段进行了详细的设计论证,因此可以近似认为几何可见即测控链路满足要求。海况等约束需根据任务实施时具体分析,本文主要分析同时满足多条弹道几何可见性的测量船布设区域确定。
测量船对火箭的可见性主要在于仰角,如图4所示,R表示地球半径,r表示航天器到地心的距离,S'表示航天器S的星下点,仰角E即为从测量船P观察航天器S时,观测矢量与当地海平面的夹角。在已知测量船位置、航天器轨道时,可通过余弦定理计算测量船观测仰角,即
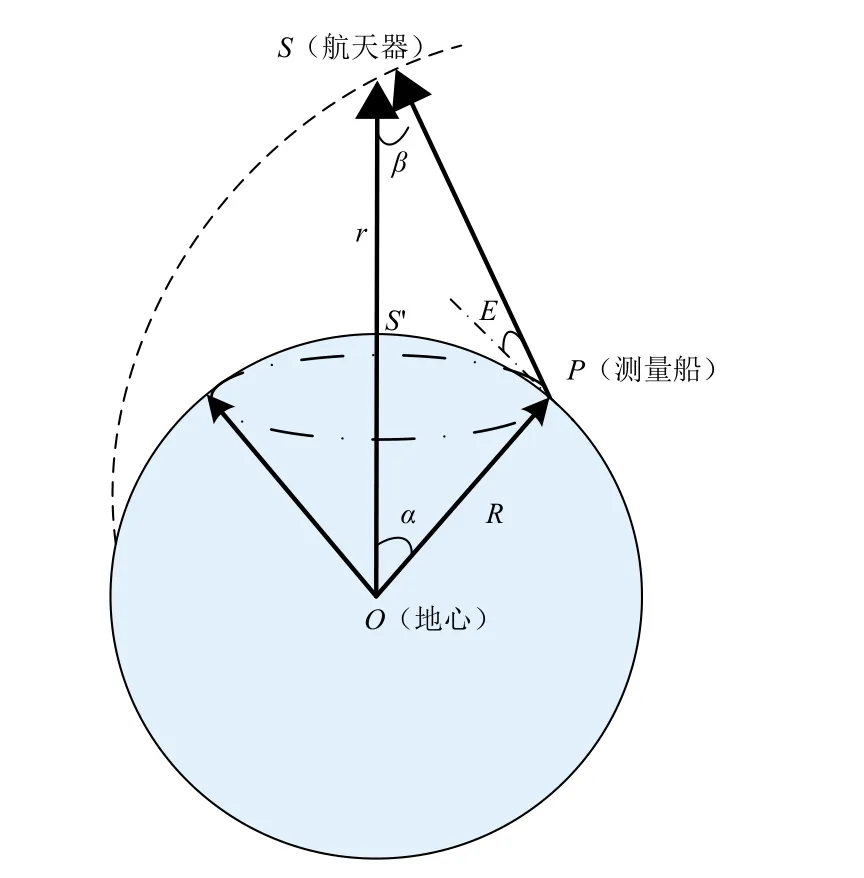
图4 测量船几何可见示意图Fig. 4 Visibility of TT&C ship

在已知航天器位置和测量船跟踪最低仰角时,可以计算得到海面能够观测到该航天器的范围为

图4中点画线确定的区域就是能够在某个固定仰角条件下观测到航天器的区域,该区域近似为以星下点S'为圆心的一个圆。
对于火箭动力段测控的要求,测量船需要:①与地面站测控弧段搭接,同时覆盖到二级一次关机点;②保证器箭分离后一定的测控时间,同时尽可能多地覆盖二级二次点火后的测控弧段。
如图5所示,以其中1条弹道为例,以地面站测控结束点和二级一次关机点为基准,分别画出满足覆盖这两个点的海面可用区域(以5°仰角为例),两个区域的交集就是测量船可布设的区域,在该区域内,对于地面测控结束至二级一次关机之间的任意一点,其距离更小,仰角更高,因此测量船可以完成这两点之前全部弧段的覆盖。同理,如图6所示,确定器箭分离后测控覆盖结束点和二级二次主动段测控开始点,可以确定测量船的布设区域。
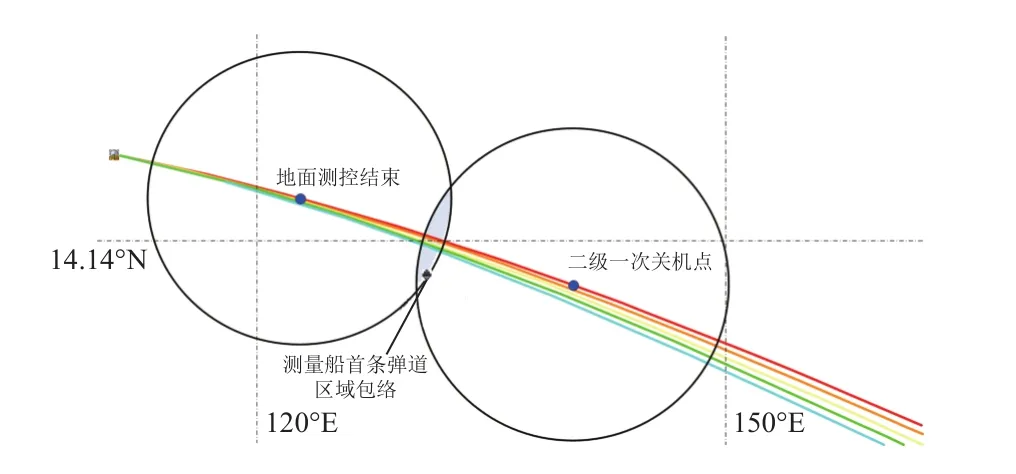
图5 首条测量船弹道1区域Fig. 5 First ship range of one trajectory
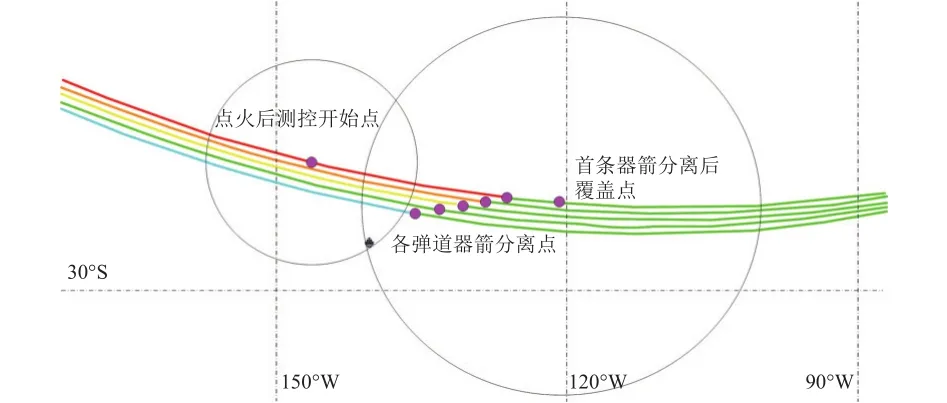
图6 第二条测量船弹道1区域Fig. 6 First ship range of one trajectory
对于全部5条弹道,每条弹道都有上述区域,将5条弹道的区域取交集,就是发射日当天的测量船适用于5条弹道的区域,如图7和图8所示。测量船在这些区域的基础上,进一步考虑领海、经济专属区、气象、水文、测控最高仰角等因素,根据具体情况确定具体船位,完成对火箭和探测器的测控。

图7 首条测量船5条弹道区域Fig. 7 First ship range of 5 trajectory
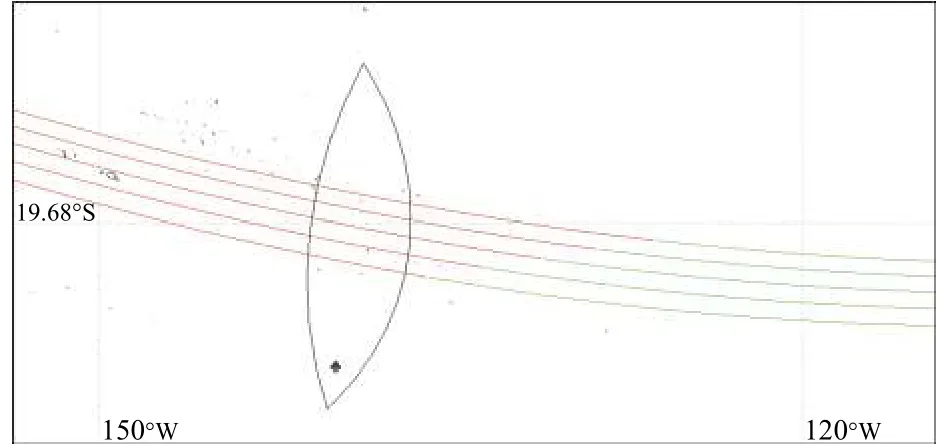
图8 第二条测量船5条弹道区域Fig. 8 Second ship range of 5 trajectories
2.2 发射段测量船快速捕获
发射段测量船快速捕获的核心需求就是快速稳定可靠地捕获,应答机的双向捕获包括发现目标、扫描、随扫和回零等步骤。传统S频段应答机的扫描范围± 115 kHz,扫描速率15 kHz/s[18-19],扫描一个周期的时间为115 kHz × 4/15 kHz/s = 30.7 s,即约30 s完成双捕[20]。而X频段应答机的扫描范围增大4倍到 ± 460 kHz,传统方法下扫描一个周期的时间为460 kHz × 4/15 kHz/s =122.7 s。“嫦娥五号”任务中,测量船一个测控弧段仅5 min左右,若双捕就需要2 min,一旦出现意外情况导致捕获丢失,那么测量船很可能没有足够的时间完成第二次双捕和应急处置,给工程任务带来很大的风险。因此必须采取措施缩短双捕时间,降低任务风险。若能把双捕时间控制在1 min内,对后续发令和应急处置的风险可控,则能够可靠保证任务实施。
为了缩短双捕时间,有加快扫描速率和减小扫描范围两个途径。应答机锁相环理论跟踪门限要求[21]为

其中:θe表 示锁相环动态应力误差;σj表示锁相环热噪声相位抖动。

其中:Bn为锁相环环路带宽;为探测器最大视线方向加速度,有

其中:a为视线方向加速度;λ表示波长。
锁相环热噪声相位抖动为

其中:S/N0为信噪比。
综合式(7)~(10)可知,应答机锁相环理论跟踪门限要求为

由式(11)可知,如果Bn过小,则动态应力误差会很大,导致失锁;而如果Bn过大,会导致信噪比S/N0过低,导致失锁。在发射及入轨段,探测器距离近,信噪比高,理论上应答机可以适应更大的扫描速率。经过“嫦娥五号”探测器系统的仿真分析和试验验证,确认发射段在15 kHz/s扫描速率的基础上,可以进一步提升至30 kHz/s的速率进行扫描。
在扫描范围上,CCSDS标准[13]中推荐的扫描范围主要考虑了探测器与地面站相对运动产生的多普勒效应和应答机接收频率的不确定性。对于多普勒效应,可以根据理论和实时飞行弹道进行预报,预报精度可达1 kHz/s,因此首先采用了预置多普勒频率,以补偿火箭飞行动态产生的多普勒效应。假设探测器进站时由于飞行方向和速度会带来200 kHz的多普勒效应,那么测量船将上行频率设置为-200 kHz附近的某个值,以抵消多普勒效应,使其靠近所要的频率,大幅减小扫描范围。对于应答机接收频率不确定性,CCSDS标准要求达到 ± 200 kHz。为快速捕获,任务中采用 ±100 kHz的带宽扫描,因此整个双捕时间小于200 kHz ×4/15 kHz/s = 53.3 s,满足任务要求,若采用30 kHz/s速率进行扫描,则可以将双捕时间降低到30 s之内。
2.3 器箭分离后地面站首次捕获
“嫦娥五号”探测器在器箭分离后有一系列重要动作需要在阿根廷深空站弧段内完成。阿根廷深空站是器箭分离后首个地面站,其顺利发现并捕获探测器,对探测器状态监视、应急处置起到至关重要的作用。阿根廷深空站35 m天线口径大、波束窄、转动速度慢,而探测器在阿根廷深空站弧段内距离较近、飞行速度快,在国际上也没有如此大口径的天线负责入轨段测控。
发射“嫦娥五号”探测器在器箭分离后进入阿根廷深空站弧段时距离约4 000 km。根据式(2),阿根廷深空站35 m天线X频段半功率波束宽度约0.07°,在4 000 km的距离上,波束覆盖是一个直径约5 km的圆。而火箭实际入轨与理论弹道的偏差最大可能达到百千米量级,利用阿根廷深空站完成扫描捕获,如图9所示。

图9 阿根廷深空站快速扫描捕获示意图Fig. 9 Fast sweep capture of Argentina deepspace station
火箭入轨精度与理论弹道偏差按照150 km考虑(误差圆),35m天线波束在此距离上覆盖直径约5 km的空域,天线最大转动速率0.8°/s,按此计算,将误差圆扫描一遍的时间约320 s。而在这个时间内,探测器相对于35 m深空天线的位置变化已经超过数百千米,方位俯仰角的变化均超过20°,早已飞出天线扫描范围,对捕获存在很大风险。
针对上述风险,也可以考虑在阿根廷深空站西部智利附近海域再布设一条测量船,辅助35 m天线捕获。但测量船从中国开赴智利附近海域航程长达数千千米,往返需要数10 d,对人力、物力消耗很大。如果将原本用于运载火箭测控的测量船布设到阿根廷深空站西部,则会损失运载火箭的测控弧段,导致无法接收火箭二级一次关机的高速遥测数据。
库鲁站15 m S/X双频段测控设备是欧洲航天局(European Space Agency,ESA)法属圭亚那的库鲁发射场附近的测控设备[22],对器箭分离后“嫦娥五号”的测控弧段与阿根廷深空站大部分重叠,它支持ESA发射及早期入轨段的任务和运行段任务,具备X和S双频段测控能力,X频段3 dB波束宽度0.19°,天线转动速率方位15°/s、俯仰5°/s,X频段发射功率82.8 dBw、G/T值37.5 dB/K。库鲁站15 m天线上还配备了一个口径1.3 m的引导天线,波束宽度2°,是库鲁15 m X频段主天线波束的10倍。按照前面的计算方法,小口径引导天线在4 000 km距离上覆盖空域的直径约150 km,基本覆盖火箭误差圆,能够可靠地为捕获高速运动的探测器提供引导。
按照库鲁站15 m天线的指标和上述入轨精度计算,库鲁站15 m测控设备能够在10 s之内完成捕获,满足任务要求。库鲁站15 m和阿根廷35 m测控设备在快速捕获能力对比如表2所示。

表2 阿根廷35 m与库鲁15 m快速捕获能力对比Table 2 Difference of fast sweep acquisition between Argentina 35 m and Kourou 15 m
为将任务风险降至最低,可靠保证探测器可靠捕获,在总体设计时,对器箭分离后可能出现的风险点进行了仔细分析,梳理了理论等待点未能发现目标、利用初轨引导仍未能发现目标等情况,同时充分发扬“协同攻坚、合作共赢”的探月精神,与ESA库鲁站联网,利用ESA库鲁站15 m测控设备进行备份,在应急情况下为探测器的捕获跟踪提供支持。
图10给出了器箭分离后首次捕获策略,根据不同分支进行了风险分析和措施应对。
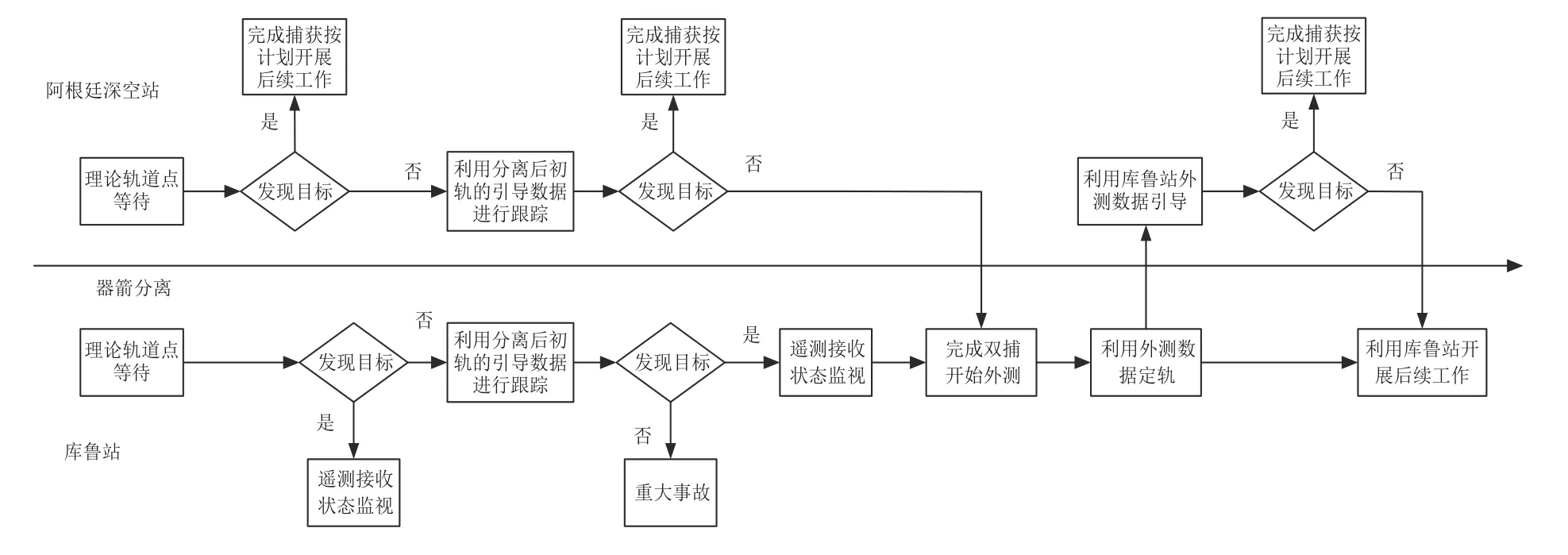
图10 入轨段地面站捕获流程Fig. 10 Capture process of ground station in early orbit phase
器箭分离后地面站首次捕获策略包含:①阿根廷深空站和ESA库鲁站初始均在理论等待点,等待探测器进站;②若理论等待点顺利发现目标,则阿根廷深空站按计划开展后续工作,ESA库鲁站进行状态监视;③若理论等待点未能发现目标,则利用器箭分离后初始轨道作引导,进行探测器搜索捕获;④正常情况下ESA库鲁站能够利用初始轨道跟踪目标,若库鲁站无法发现目标属于重大事故,按照应急预案开展后续工作;⑤若利用引导数据阿根廷深空站仍无法稳定跟踪目标,则利用ESA库鲁站对探测器进行外测,利用积累的外测数据再进行轨道确定,为阿根廷深空站提供引导,阿根廷深空站按计划开展后续工作;⑥若利用ESA库鲁站引导数据阿根廷深空站仍无法跟踪目标,则后续工作由ESA库鲁站开展。
3 工程在轨验证
在“嫦娥五号”任务工程实践中,上述总体设计方法都起到的相应的重要作用。
船位选择方面,两条测量船提前到达了菲律宾以东、太平洋东南部预定海域,完成了相应海域的勘察,天气探测、相关试验准备等工作。在海况、气象等条件允许的情况下,选择了测控弧段更长的船位,超额完成预定遥测数据接收任务30 s以上。
探测器捕获方面,根据理论飞行弹道事先计算了飞行全过程的多普勒,实现可以在弹道任意时刻准确预置多普勒值。实际飞行过程中多普勒预置准确、无线电信号较强,扫描捕获过程顺利实施,未出现失锁重捕现象,在探测器进入弧段后快速完成双向捕获,比预计时间提前20 s以上,顺利完成后续工作。
入轨首次捕获方面,由于运载火箭入轨精度非常高,阿根廷深空站和ESA库鲁站都在第一时间等待点发现了目标,探测器器箭分离后的测控工作由阿根廷深空站完成,ESA库鲁站作为备份持续监视探测器状态,“保驾护航”直至其第一个测控弧段结束。
4 结论与建议
“嫦娥五号”任务已经圆满成功,测控系统也圆满完成了包括发射及入轨段在内的各项任务,任务总体设计在准备及实施过程中起到了重要作用,为X频段发射及入轨段测控积累了重要经验,为将来更高频段测控打下了基础。未来发射段测控总体设计中,要着重针对船位布设、测量船快速捕获和入轨后首次捕获开展系统设计,必要时进行试验验证,采取有针对性预防措施,将风险降至最低。就本次任务发射和入轨段测控而言,能够得到的经验和建议如下。
1)在发射段多窗口设计中,从运载火箭的角度来说,不同理论弹道的特征点(二级一次关机、二级二次点火、器箭分离等)应尽量靠近,使得测量船能够同时兼顾多条弹道的测控;从测控系统的角度来说,建议未来考虑采用机动能力更强的测控设备,如测控飞机,能够根据发射时具体弹道及时选择的更优化的测控点位,实现更长测控弧段。
2)深空应答机设计中,需重视同时兼顾X频段(或未来更高频段)发射段高动态、快速捕获和深空段低动态、低信噪比的情况。应答机需具备发射段快速捕获和应急指令接收能力,能够提高适应的最大扫描速率(30 kHz/s),减小扫描范围( ± 200 kHz)。
3)大口径天线在入轨段捕获中能力较弱,对于首次捕获存在较大风险,建议在阿根廷深空站参照库鲁15 m设备的能力,新建类似库鲁15 m测控设备并配备1 m左右的引导天线辅助主天线快速捕获,完成入轨段快速捕获的同时一定程度兼顾未来探月任务的多目标测控支持的需求。
猜你喜欢
上海航天(2024年1期)2024-03-08 02:52:28
电子设计工程(2022年24期)2022-12-23 12:03:28
环球时报(2022-08-15)2022-08-15 17:13:41
小哥白尼(趣味科学)(2022年3期)2022-06-09 03:22:48
军事文摘(2021年22期)2022-01-18 06:21:58
光学精密工程(2021年8期)2021-10-04 11:46:28
电子制作(2019年7期)2019-04-25 13:17:48
智富时代(2017年7期)2017-09-05 10:08:11
制导与引信(2016年3期)2016-03-20 16:02:02
四川建筑(2015年4期)2015-06-24 14:08:40