基于星站差分GPS的水下光谱剖面测量方法研究
2022-05-05 05:42韩宏达
经纬天地 2022年1期
韩宏达
(黑龙江地理信息工程院,黑龙江 哈尔滨 150081)
0.引言
随着全球陆地资源日渐短缺,很多国家将视线转移至海洋中。对海洋的水体进行离水辐射亮度检测,能得到水体中各物质的组成与含量。水下剖面光谱测量是检测离水辐射亮度的主要方法,离水辐射亮度的产生源于水体中存在的生物与悬浮物,这些物质在水、光、大气的共同作用下发生散射,得到离水辐射亮度。对离水辐射亮度的精准测量能帮助专家精准地推测海洋的水质状况,为海洋水质研究提供有价值的参考。
在目前的有关研究中,田礼等[1]基于SBA水体光谱现场获取原理,设计了基于SBA的水体光谱测量系统硬件和软件,进而实现连续直接观测,得到离水辐亮度;曾凯等[2]设计了海底光谱反射率测量双光路采集系统,为消除测量探头与被测物之间的距离影响,采用放置灵活的参考白板,方便对目标物贴近测量,双通道的同步测量能够避免水下光场对测量结果产生影响,使测量结果相对精准。以上传统的光谱剖面测量方法中,使用普通卫星能够接收海洋中的离水辐射亮度,但是由于大气粉尘等形成的气溶胶以及一些小直径粒子的散射影响,使普通卫星接收到的离水辐射亮度出现偏差。为提高卫星的接收精度,本文设计一种基于星站差分GPS的水下光谱剖面测量方法。
1.基于星站差分GPS的水下光谱剖面测量方法研究
1.1 水下光谱剖面仪的结构设计
在水下光谱剖面测量方法设计过程中,需要采用光纤式高光谱剖面仪。该类型仪器的主要媒介是光纤,以完成光信号传输,将信号从水下位置传输至光谱仪中,完成水下剖面光谱数据的通讯与测量[3]。水下光谱剖面仪的测量过程示意图(如图1所示):
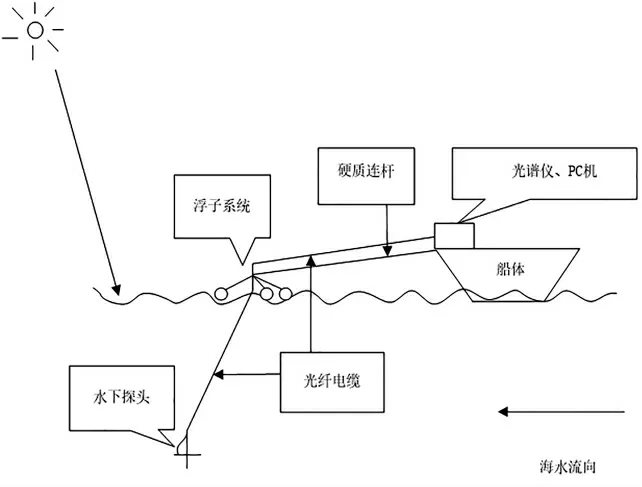
图1 剖面仪测量使用示意图
由图1可知,水下光谱剖面仪在工作过程中需远离船体,因此利用硬质连杆支撑光纤的电缆,将浮子系统移动至船体向阳面,电缆采集到水下的光信号后连接表面光谱仪,测量过程中所获得的信号能够通过光纤连接船上的光谱与水下的测量状况,经过数据处理与分析之后得到水下的剖面光谱[4]。在光纤选择过程中,由于水体中的入射光存在于入射光谱近红外波中,测量过程中易被大气、海水表层所吸收,因此在光纤选取中需要重视波段为250nm-341nm的光纤传输性能。一般的光纤芯直径较小,相对于水下光谱剖面仪而言,其接收并传输的入射辐射量达不到检测范围要求,因此光纤需要选择水下光谱剖面仪的适配特种石英PCS光纤,其芯径为0.58mm~0.65mm,数值孔径为0.57mm,这种适配特种光纤在测量过程中产生的损耗较小,其曲线与镜头测量值具有较高的相似性。使用该类光纤与水下光谱剖面仪相连接,能够提高实测值的精度。
1.2 引入星站差分GPS技术
传统的GPS定位技术因受气候限制,定位精度较差,因此本文使用星站差分GPS代替传统RTK技术应用于水下光谱剖面测量。星站差分GPS实际上是一种单机RTK技术,与传统RTK相比,其对基准站进行了更换和替代。星站差分GPS技术的整体拓扑结构包括:L波段的通信卫星、GPS卫星定位系统、用户接收机、注入站、数据处理器及遍布全球的GNSS参考站网络。GPS卫星定位系统获取信息后,通过参考站网络传输至注入站与数据处理器,再经雷达传至L波段的通信卫星上,经过DGPS差分之后,得到差分改正数据,传入用户接收机中,实现地面与卫星之间的数据联通与交换。本文研究的水下光谱剖面测量方法使用MarineSTAR星站差分技术,针对不同的水下光谱剖面进行测量,MarineSTAR星站差分技术可以提供多种GPS差分等级服务,能够针对不同的置信度环境提供有效的定位精度,总体来说在信号覆盖范围内,平面和高程的精度能够保证在15cm以下[5]。在星站差分GPS测量系统中,设置双串口PC卡、PC机以及GPS接收机等硬件装置,其中重要的探测仪器为15H型海鹰探测仪,在星站差分GPS工作机制下,卫星接收到辐射亮度后,其测量所处的大气环境对辐射亮度的测量结果具有重要影响。因此,为保证测量获得的离水辐射率准确度,需进行大气校正。
1.3 水下光谱剖面测量数据处理与计算
由于受卫星工作环境的影响,在恶劣天气条件下,图像的获取与通信会存在一些条带,因此在测量结束后,需要对图像以及数据进行处理。本文采用自适应局部回归法,在数据相同的多个测量图像中,选择区域面积最小且相关性最大的区域进行分析。针对遥感图像,选择经过自适应局部回归法去除条带后的某波段图像,搭配大气校正的波段图像,并切割图像以简化数据,并将其进行掩膜处理,以去除遥感图像中的陆地部分。
完成数据整理后,需要对星站差分得到的遥感数据图像进行辐射校正。在水下剖面测量过程中,传感器传输的辐射强度能以图像灰度值的方式体现[6]。在真实的测量过程中,传感器能够接收到的辐射强度除了目标物自身的真实辐射外,还受水下其他物质的影响。在测量过程中,除了传感器误差外,对于大气辐射进行校正是测量方法中的关键环节。基于大气与太阳辐射的独特性,太阳辐射在穿越大气过程中经过一系列折射、吸收及散射等自然现象,其在计算水层遥感反射率时需依据辐射校正后的遥感数据进行计算。对于星站差分GPS卫星,计算如式(1)所示:

本文在测量中主要利用ETM+的3波段,通过查阅相关资料,可以确定上式中值为0.9215,为遥感抵消,具体数值为-3.8810。校正的相关流程(如图2所示):
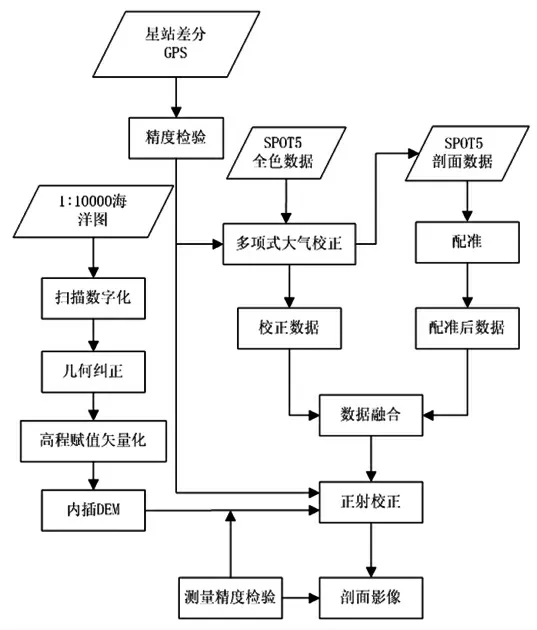
图2 大气校正流程图
在上述校正流程下,对遥感图像进行相关的波度运算,从而得到辐射亮度值。对于遥感反射率,其计算如式(2)所示:

式(2)中,P0为目标反射的辐射能量;P为总入射能量;RS为无量纲。由于不同目标的外在形状及质地不同,故遥感反射率存在一定差异。针对水下光谱剖面进行测量,目标绝大多数时候会发生漫反射,这种情况下的太阳辐射波长与角度对最终的测量结果会产生影响。为提高测量精度,可以采用缩小自然光入射角的方式减少镜面反射。一般水中物体的反射率范围为[0,1],通过反射率数值判定目标物体的性质与浓度。在测量中,需对大气传输的方程进行简化,编写与太阳光谱相关的信号以模拟太阳辐射的传输过程,假定测量环境为晴朗无云,考虑到大气环境中正常物质的系统以及气溶胶散射问题,故将相关参数与处理过的水下遥感数据代入计算,得到高质量的水下光谱剖面测量遥感数据。至此完成基于星站差分GPS的水下光谱剖面测量方法研究。
2.试验
2.1 试验准备
为验证基于星站差分GPS的水下光谱剖面测量方法的有效性,选择某研究区的水体进行测量。该研究区的海水纳污能力强,其中含有的泥沙较多,海滩土质松散,包括粉质黏土、砂质黏土、粉砂混合土等多种类型。在该片研究区中设置若干测量点,分别对其进行表观光学及固有光学测量。选择其中两个测试点,得到相关点位信息(如表1所示):
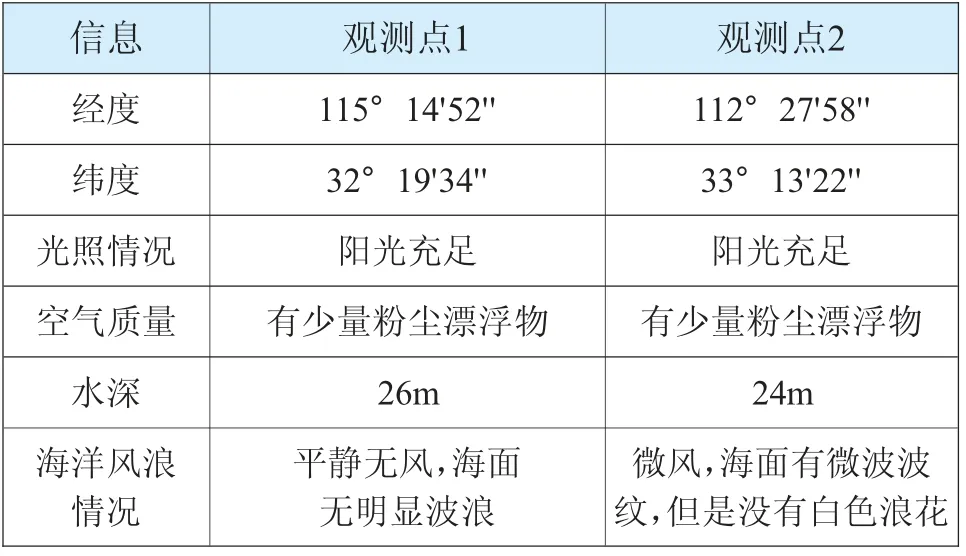
表1 两个观测点相关点位信息
在测量过程中,本文使用基于星站差分GPS的水下光谱测量法,将光谱仪的观测角度设置为与太阳入射平面夹角的135°,与地平面的法线夹角为40°,仪器测量示意图(如图3所示):
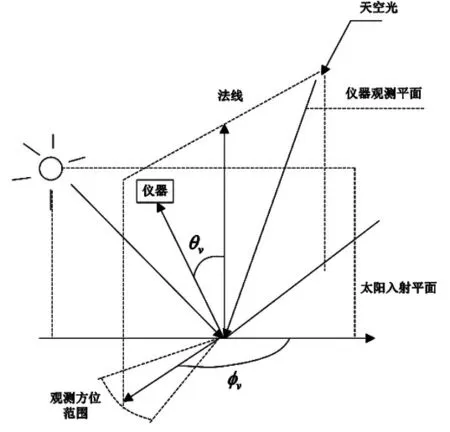
图3 水下光谱测量示意图
水下光谱的遥感反射率计算如式(3)所示:

式(3)中,ρ为漫反射板的反射率;本文选择的漫反射板反射率值为24%,Yi为水下反射率;n为海洋表面的反射率;Yi为天空反射率;Yq为离水辐射率。水下光谱剖面测量仪主要是依靠其特有的辐照度来接收水下测量的辐照度,使用漫反射板测量水面到测量船中的上行光辐射率,水下各层面的遥感漫反射率计算如式(4)所示:

式(4)中,λ为海面的入射辐照度。在上行光以及下行光所覆盖的测量剖面中,各个方向光的分布相对均匀,因此某些角度的通光量较理想中的分布大。本研究使用的测量仪器与传统方法使用的测量仪器参数(如表2所示):
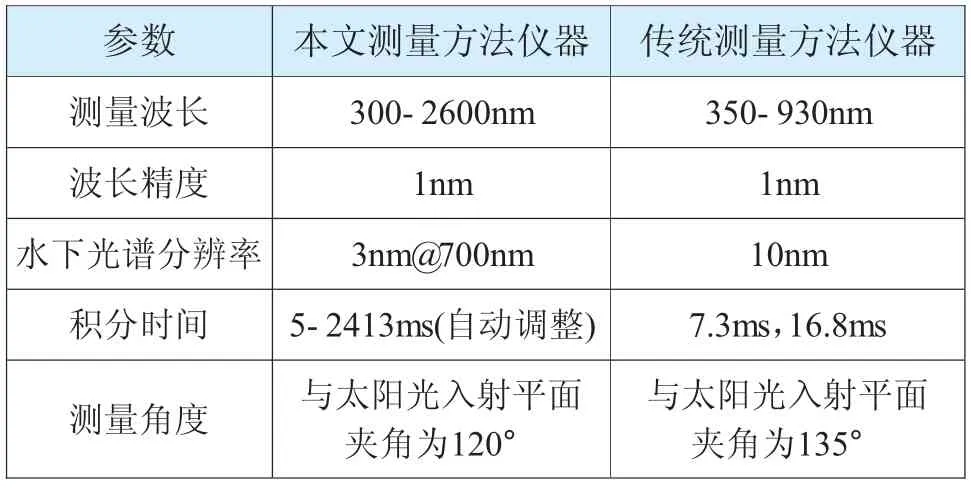
表2 两种方法所用仪器参数
在上述试验环境下,使用传统水下光谱剖面测量方法进行同步测量,并对测量结果进行对比与统计分析。
2.2 试验结果与分析
经过测量试验,得到两种方法的水层遥感反射率曲线(如图4所示):
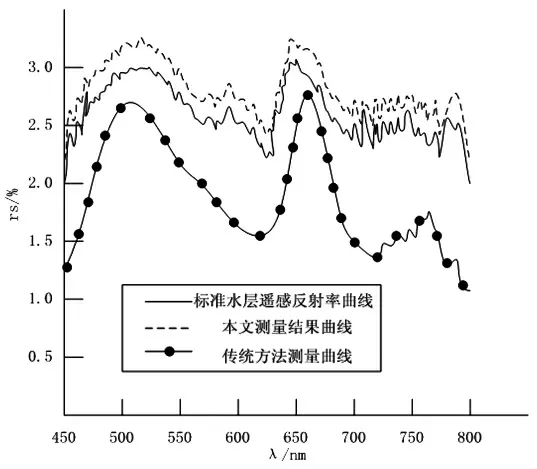
图4 两种方法得到的水下遥感反射率曲线
根据公式中的计算方法,分别使用本文设计的测量方法与传统测量方法得到水下统一深度的遥感反射率。由于光线在水中发生折射,故水下光谱剖面仪能接收到经水面折射的光斑。从上图可以看出,本文测量方法得到的遥感反射率与标准水层遥感反射率曲线在450nm~800nm高度相关,经计算机对比,两曲线的相关系数R2>0.995,传统测量方法得到的曲线与标准水层遥感反射率曲线的相关系数R2>0.855,吻合情况不及本文方法,说明本文方法的测量准确度较传统方法高。
3.结束语
在遥感反射率测量过程中,大气环境及水环境中存在诸多影响测量准确性的因素,因此本文引入星站差分GPS技术以避免测量及传输过程中带来的误差和影响。在水下光谱剖面测量过程中,受传统基站束缚较少,通过一系列传输流程使卫星接收到辐射亮度。为保证测量准确度,还需对水下光谱剖面测量数据进行处理与计算以校正大气辐射。结果表明,本设计方法可提高遥感反射率曲线的测量准确度。
猜你喜欢
数学杂志(2022年5期)2022-12-02
冶金能源(2022年5期)2022-10-14
湘潭大学自然科学学报(2022年2期)2022-07-28
——缺陷度的算法研究
条码与信息系统(2022年3期)2022-07-05
汽车电器(2022年6期)2022-07-02
新世纪智能(数学备考)(2021年5期)2021-07-28
燃气涡轮试验与研究(2020年2期)2020-06-20
汽车文摘(2018年2期)2018-11-27
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
汽车与新动力(2015年1期)2015-02-27