倾斜摄影测量在城市精细三维建模中的应用研究
2022-05-05 05:41贺正训
经纬天地 2022年1期
贺正训
(广州市城市更新规划设计研究院有限公司,广东 广州 510030)
0.引言
随着科学技术的不断发展,数字地球、城市智能开发规划、智能旅游及社区服务等现代化建设得到了较大突破,并且越来越多的从业人员对构建城市真正的三维数字模型有着极大的兴趣[1],具有真实质感的数字城市也展现了巨大的市场价值,具有非常广阔的应用及发展前景。地形和建筑物的立体模型成为数字城市立体景观模型的最重要的模型,其中数字城市建设的基本内容是建立建筑物的三维模型。
随着无人机技术在测绘领域中的不断推广应用,基于无人机的倾斜摄影测量技术逐渐成为城市精细化三维建模主要技术手段[2]。因此,不断研究和改善无人机倾斜摄影测量三维建模方式,提高建模效率和成果精度,降低作业成本,不断推动无人机倾斜摄影技术在城市精细三维建模领域中的应用及深层次研究,是现阶段及未来极为重要的研究方向。
在本次研究过程中,采用无人机倾斜摄影技术对研究区进行航摄作业,高效获取多视角高精度原始影像数据,采用DP-Modeler软件进行内业数据处理,建立研究区实景三维模型,并对建模成果进行精度分析,研究无人机倾斜摄影测量在城市精细化建模中的适用性及可靠性。
1.倾斜摄影技术
1.1 倾斜摄影技术简介
倾斜摄影测量的主要特点是摄影相机的主光轴与地面的垂直方向存在一定的夹角,从而实现对地表地物的旁向摄影测量(如图1所示)。其中,当倾角小于5°时,视为垂直摄影测量;当倾角大于5°小于30°时,视为轻度倾斜摄影测量;当倾角大于30°小于90°时,视为高度倾斜摄影测量;当倾角接近90°时,视为水平摄影测量。

图1 倾斜摄影测量光线原理示意图
1.2 技术特点
传统摄影测量多采用正射角度进行地物信息采集,从地物顶部以下视摄影方式进行拍摄,能够对地表地物的顶部特征信息进行充分反映,但无法对地物侧面进行数据采集[3];倾斜摄影测量能够弥补垂直摄影测量的不足,以一定倾角对地物侧面进行摄影测量,但容易被其他地物遮挡,造成拍摄影像信息缺失(如图2所示)。因此在利用无人机进行摄影测量作业时,应采用多基线多视角的航摄形式,尽可能从多个角度获取地物信息,最大程度获取地物完整影像数据,满足三维建模需求。
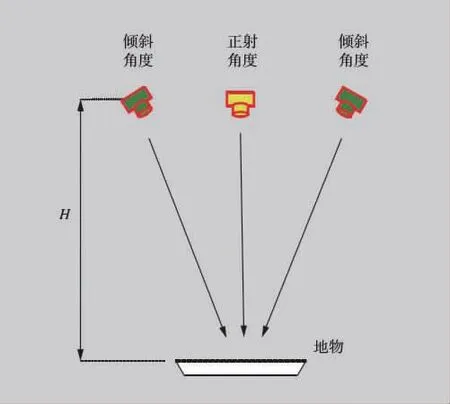
图2 倾斜摄影和垂直摄影区别示意图
2.关键技术研究
2.1 自动空三
无人机倾斜摄影测量充分结合先进视觉还原技术,将传统航测系统中的高精度定向技术与计算机视觉三维现实还原技术进行充分融合[4],从而使得三维实景模型在具有美观性的基础上,同时具备可量测性,扩宽应用场景。自动空三过程主要分为连接点自动匹配、自由网构建、区域网平差三个步骤(如图3所示):
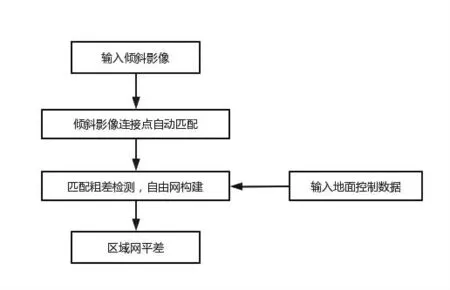
图3 自动空三
2.2 倾斜影像的密集匹配
以SHIFT算法为基础,建立数学关系模型,对待匹配特征点间的欧氏距离进行计算,并将其作为匹配测度对倾斜影像的特征点进行密集匹配。算法的主要过程:首先对核线影像进行彩色分割,然后以半全局匹配算法为基础,构建原始影像的视差图;假定用来进行影像分割的块为最小匹配单位,以Ransac(随机采样一致性)方法为基础,进行视差平面拟合处理,然后利用置信度传播方法,对拟合成果进行视差平面分配,其成果即为最终所需要的视差图。由于SHIFT算法匹配效率和适用性具有一定的限制,故将影像分块和SHIFT算法进行充分融合,有效提升了视差范围较大条件下SHIFT算法对于倾斜影像的密集匹配速度,扩大其应用场景。
2.3 倾斜影像粗差检测
对倾斜摄影影像密集点粗差进行合理剔除,可以有效提高三维建模精度。粗差检测剔除和自由网构建过程:首先以RANSAC方法为基础,采用5点法相对定向法,建立粗差检测双模型,进行密集点粗差检测[5];然后采用空间前方交汇算法,计算密集点残差,将残差值较大的像点进行剔除;然后通过选择具有较多连接点的三张影像进行两两间的相对定向,若计算获得的3个线元素向量为共面向量,3个旋转矩阵的依次相乘结果为单位矩阵,则表明倾斜摄影相对定向结果准确,可靠性较高,从而输出自由网构建结果。
3.实例探究
3.1 研究区概况
本次研究以丘陵地区小范围城市区域为研究对象,研究区域南北方向长900m,东西长500m,采用无人机倾斜摄影技术获取该地区外业航摄数据。在本次研究过程中,以无人机倾斜摄测量技术为基础,共获取1380张航摄影像,其中垂直影像有276张,倾斜影像有1104张。在本次无人机飞行过程中,共设置8条航带,均匀部署了40个影像控制点。航摄技术参数(如表1所示),飞行路径及图像控制点点位分布(如图4所示):

表1 航摄技术参数统计表

图4 飞行路径和像控点布设方案图
无人机倾斜摄影测量在航拍作业时,其主要的作业任务是采集研究区的地表地物影像数据信息。在此过程中,所获取影像的旋转角度、重叠和路线曲率是测量的核心指标。航摄相片质量直接影响空三加密解算的准确性,从而影响最终生成的测量及映射产品的准确性。在本次研究过程中,使用专业的无人机飞行质量检测软件,快速处理研究区范围内的全景图像,对飞行作业进行现场实时质量评估,并在较短的时间内取得结果并评价成果质量。本次航拍作业质量检查成果(如图5所示):
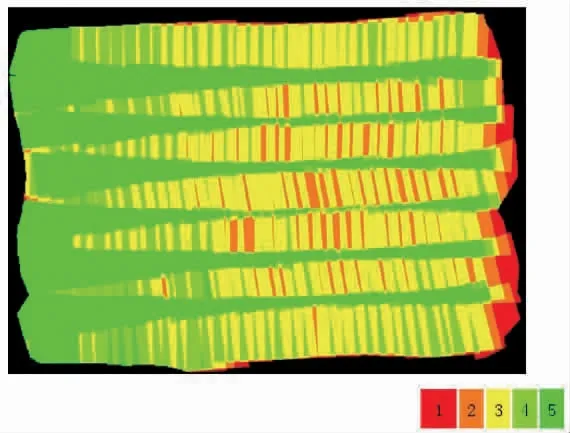
图5 航飞质量报告
通过对图5进行综合分析,能够详细明了地检查无人机的飞行质量,能够有效提高航拍飞行效率。本次航拍过程的航拍影像具有较高的重叠度,导致在无人机转换飞行航带时存在遗漏影像,但由于航拍面积大于研究区面积,故不影响研究区城市精细三维模型基础数据采集工作的进行,无须进行再次航拍作业。
3.2 建模成果
以无人机倾斜摄影测量获取到的原始影像数据为基础,构建研究区三维实景模型,首先需要对原始影像数据进行预处理。由于原始影像中存在光照不均匀现象、拍摄角度存在差异、拍摄时有时间差等,故所得到的原始影像数据存在较大的辐射误差。建模前需最大程度降低该误差,故需要对原始数据影像进行归一化处理。
POS系统提供的航摄影像的外部方向要素和地面基准点数据结合,从而形成研究区地物信息空间数据。以SHIFT特征提取算法为基础,对外业所拍摄的原始影像进行特征提取,从而建立特征点之间的连接点和连接线,然后利用控制点坐标和POS数据,构建该地区城市区域网平差误差方程,对其进行联合平差计算,从而获得各航摄影像的外方位元素以及所布设的空三加密点物方坐标数据。
以获取的垂直和倾斜影像数据为基础,结合空三加密成果,利用数据影像的外方位元素,对多角度多视觉影像进行综合匹配,从而生产出密度相对较高的点云数据,进而构建能够对地表地物真实反映的数字表面模型数据。通过归一化处理以及纹理增强处理,把具有较高分辨率的纹理通过一定方式映射到DSM数据表面,进而生成研究区的三维实景模型(如图6所示):
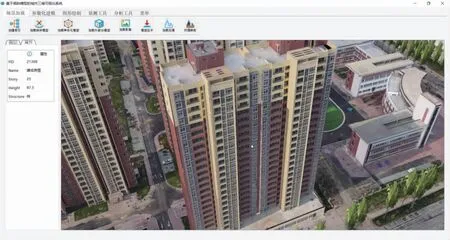
图6 研究区三维实景模型
3.3 模型精度评定
3.3.1 理论精度评定
(1)空三加密的像点精度
将待评定点位的坐标改正数假设为随机变量,则坐标改正数的方差—协方差矩阵便可利用最小二乘平差方法进行计算求解,从而获得待评定点位坐标的理论精度。图像像素的均方根可以评定计算结果的优劣,像素的均方根在0.5像素以下,才可以满足使用精度要求。在本次研究过程中,空三加密后的像控点中误差为0.0016mm,满足精度要求。
(2)空三加密的检查点精度
在完成空三加密后,需对检查点的误差进行综合分析,其误差是由检查点实测数据与空三加密后的影像对应点数据差值。在本次研究过程中,在研究区内均匀布设了40个控制点,在其中选择了10个控制点作为检查点,各方向残差(如表2所示):

表2 检查点X/Y/Z的方向残差表
城市精细三维实景模型平面精度中误差计算公式如式(1)所示:

式(1)中,m为待评定点位各方向中误差;△为真误差;n为检核点数量。
将检核点残差代入式(1)进行计算,可得出检查点的中误差结果,其中平面坐标中误差为±0.109m,最大误差是0.167m;高程中误差为±0.218m,其中最大误差是0.407m。通过查阅相关资料可知。城市精细三维建模数据采集需满足1∶500测图比例尺精度要求,由于研究区为丘陵地区,平面限差为0.5m,高程限差为0.4m,故本次研究过程空三加密的检核点精度满足使用要求。
3.3.2 模型实际精度评定
城市精细三维模型的实际精度主要分为三个方面:实景模型平面精度、高程精度以及几何精度评定。在实际模型生产过程中,由于存在较多偶然误差以及不同像控点布设方式不一样,模型精度和理论精度往往存在较大偏差。因此,需要对三维实景模型的实际精度进行综合分析。
(1)平面精度
在研究区范围内均匀布设了20个平面控制检查点,对实景模型的平面精度进行综合评定,统计结果(如表3所示):

表3 平面检查点精度统计表
通过对表3进行分析可知:研究区的三维实景模型X方向的中误差为±0.168m,Y方向的中误差为±0.186m,因此该地区城市精细三维模型平面坐标中误差为±0.251m,其中最大误差为0.461m。三维模型平面坐标差值普遍在0~0.3m之间。经查阅相关资料可知,实景三维模型的平面精度应满足1∶500成图比例尺Ⅰ级精度要求,即平面误差小于0.3m,故可知本次研究过程中构建的三维模型平面精度满足规范要求。
(2)高程精度
在研究区范围内均匀布设了16个高程检查点,对实景三维模型的高程精度进行综合分析评定,统计结果(如表4所示):

表4 高程检查点高程精度统计表
通过对表4分析可知:研究区的三维实景模型高程中误差为±0.117m,最大误差为0.189m。高程中误差是评估实景三维模型的地形精度的重要指标,规范要求不得大于0.75m,故本次研究过程中构建的三维实景模型满足规范要求。
(3)几何精度
在本次研究过程中,除对测区三维实景模型的单点平面和高程精度进行分析外,还对模型特征线进行几何精度验证。本着“均匀分布”的原则,在研究区范围内随机选取25条具有显著特征的建筑物特征线,取2次独立测量结果的平均值作为真值,并与三维模型上的对建筑物边线进行对比分析,研究测区三维实景模型几何精度,统计结果(如表5所示):

表5 建筑物特征点长度对比表
通过对表5分析可知:本次研究建立的测区实景三维模型的几何中误差为±0.057m,最大误差为0.13m,几何精度满足规范和生产要求。
本次研究过程中,基于无人机倾斜摄影测量技术获取研究区范围内的原始影像数据,构建研究区三维实景模型。通过对三维模型进行精度分析评定,得到的结果为:研究区三维模型平面中误差为±0.251m,高程中误差为±0.117m,引入几何精度评定分析,几何中误差为±0.057m。通过研究区三维模型的精度评定结果可知,所构建的模型精度完全满足规范要求和使用生产要求。故以无人机倾斜摄影测量技术为基础,进行城市精细三维模型构建,能够有效提升建模效率,并保证高质量三维模型成果输出,具有较高的现实意义。
4.结束语
无人机倾斜摄影测量能够实现大面积范围内城市地物信息的快速采集工作,从而完成城市精细三维模型的快速构建工作,推进数字城市建设的发展。本次研究通过对无人机倾斜摄影关键技术的详细研究,运用项目实例进行分析论证,分别从平面、高程及边长中误差对城市精细三维模型成果进行精度分析,验证了无人机倾斜摄影测量在城市精细三维建模中的可靠性及成果准确性,且有效解决了传统建模方法的不足,实现了城市精细三维模型的快速构建与更新,具有较高的现实意义。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
一重技术(2021年5期)2022-01-18
国画家(2021年4期)2021-10-13
现代企业(2021年2期)2021-07-20
华人时刊(2021年23期)2021-03-08
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
初中生世界·九年级(2020年2期)2020-04-10
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2018年17期)2018-09-28