
基于多径环境下的非同步OFDM网络定位技术
2022-05-05 13:38卞志勇牛利平
计算机与现代化 2022年4期
卞志勇,牛利平
(1.南京机电职业技术学院,江苏 南京 211306; 2.河南师范大学,河南 新乡 453007)
0 引 言
随着智能网络时代的到来,利用无线基站在导航、公共安全、执法、救援行动、交通管理、库存跟踪、家庭自动化和病人监测等领域对无线目标节点设备进行准确的位置分析具有重要意义[1]。而作为当今标准中领先的通信方法,正交频分复用技术(OFDM)在无线通信中具有许多优点[2-3]。过去的几年中,在不同步的情况下基于现有的OFDM无线网络基础设施的部署和对定位服务的需求,使得OFDM技术有了显著的发展[4]。而基于OFDM的定位技术依赖于测量2个无线设备之间的信号传播时间及到达时间(TOA)[5]。在自由空间环境中,发射机和接收机之间只存在一条路径,因此估算TOA相对简单。而在室内环境中,发射信号被环境中的墙壁、地板、天花板等物体反射,并且在低信噪比条件下易形成许多密集的重叠信号副本,这使得准确计算TOA(对应于直接视线(LOS)路径)极具难度[6]。位置计算可通过单向传输(BSs或目标节点)或双向传输来完成[7]。单向定位需要同步BSs(Base Stations, BSs)的开销,而双向定位需要一个专用协议来测量基站和目标之间的往返延迟。在当今许多已部署的无线网络中,BSs通常是不同步的且BSs的硬件不支持往返延迟测量[8]。因此,目前无线网络中基于位置的服务仍具有很大的局限性。
国内外大量学者对该方面进行了研究并提出了在多径条件下计算TOA的各种方法。Shojafar等人[9]将802.11 OFDM用于无线网络中目标节点的位置分析。在该研究中位置信息较少地依赖于TOA测量,并在实际的多径环境中给出了结果,但该方法对于多目标的定位精度和准确性方面误差较高。此外McDermott等人[10]提出了一种基于同步BSs和“低多径”的定位方法。在该研究中,第一到达分量明显强于随后的多径分量,并且在“低多径”条件下获得了较小的平均位置误差,但是该方法的不足在于工作量较大且对周围环境的噪声要求比较高。而国内学者李豹等人[11]比较了多径环境下多种定位估计方法的性能,认为如要达到精确定位采用的大多数方法都不能仅仅基于TOA测量(例如内部运动单元测量和指纹识别),还需要特定节点与已知位置的锚节点时钟同步,并进一步结合对多径干扰的影响因素。该算法计算复杂度高,实现更繁琐。Wylie等人[12]提出了改进的TOA测试方法,考虑多径环境中各种NLOS误差的性质,通过处理TDOA存在的时延差数据完成视距的近似重构,得到测量值后进行定位。该算法的前提要具备精确的视距环境的先验参数,不适合动态变化的多径环境。
本文基于已知位置的参考节点及BSs传输,通过目标和参考节点上的采集样本导出目标的近似最大似然估计法(ML)位置,提出一种基于非同步BSs传输的OFDM信号目标节点精确位置计算方法,并对分析性能进行分析。该算法能够利用现有的无线网络基础设施,不需要在BSs中进行任何修改而对无线设备进行精确的位置计算,研究结果对于类似室内环境下的位置估计算法研究具有一定的理论意义。
1 系统模型的建立
本文采用的定位系统如图1所示。该系统包括K(K≥3)个不同步BSs,在已知位置p0,…,pK-1(在2D中)中pr处的参考节点和未知位置pt处的目标节点BSs发送OFDM信号的数据包。每个数据包包含一个已知的前导码符号,后续包括BSs标识号、分组标识号和可选数据的有效载荷代码。其中目标节点和引用节点充当嗅探器,查找每个BSs传输的任何数据包[13]。然后根据在目标和参考节点中从每个BS相互接收到的数据包进行目标节点位置计算[14]。在定位会话期间通过多种方式激活所有要传输的BSs。当每个BS感测通信链路在处于空闲状态的时间间隔发送信号时,可以实现有效的时间分离,BSs传输在频率或时间上是分离进行时,便不存在传输冲突[15]。例如,可通过具有与802.11无线LAN中使用的载波感测多址冲突避免(CSMA/CA)协议相同的分组标识号来标识相互分组。
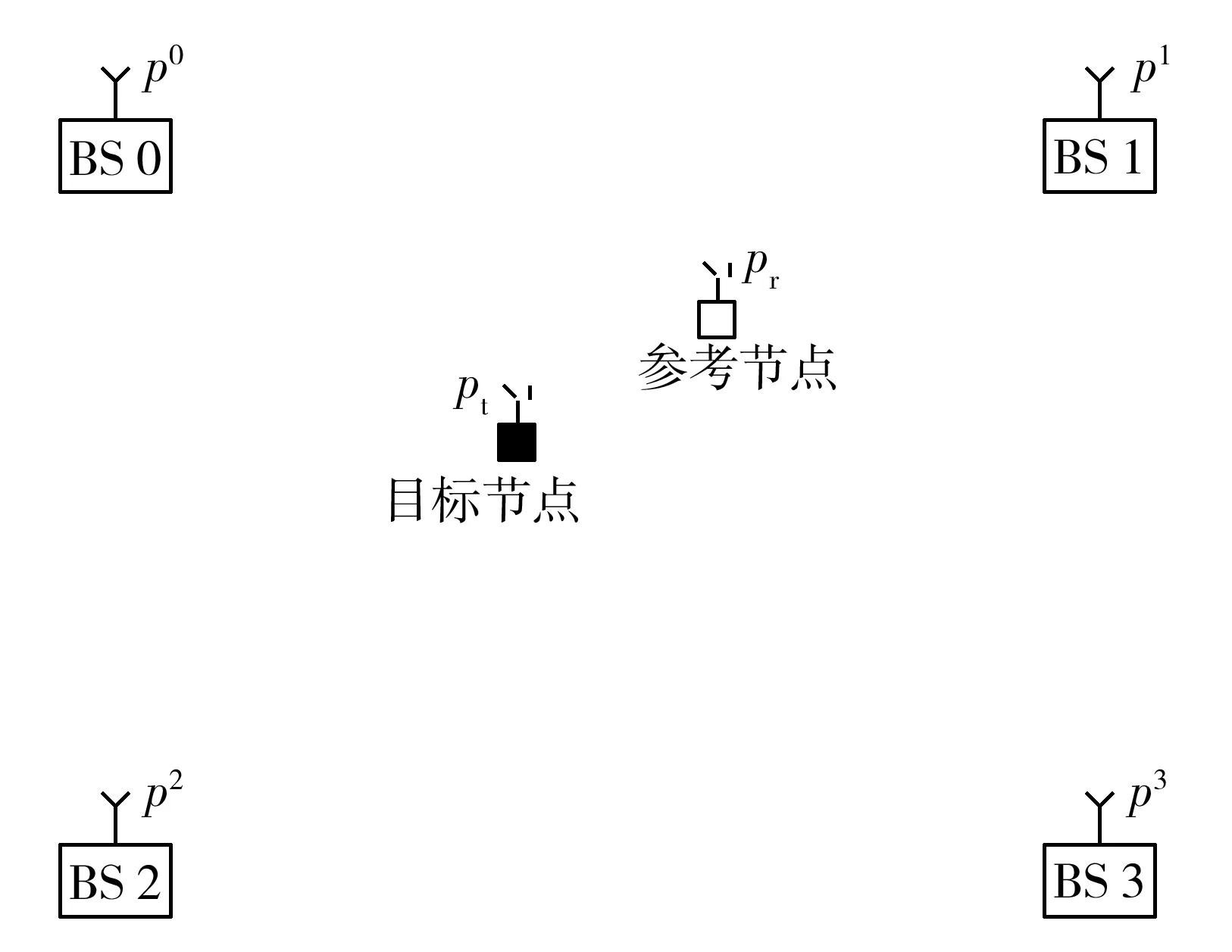
图1 定位系统示意图
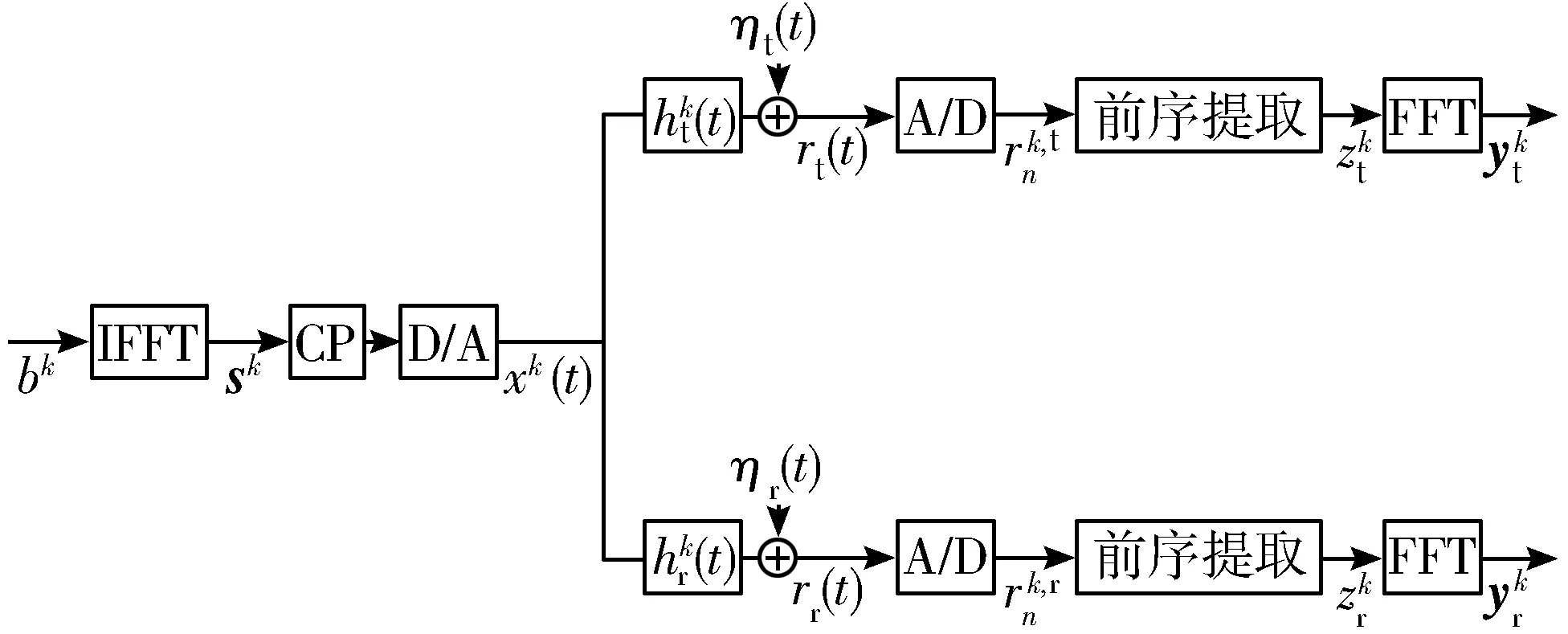
图2 基带信号与信道模型

(1)
(2)

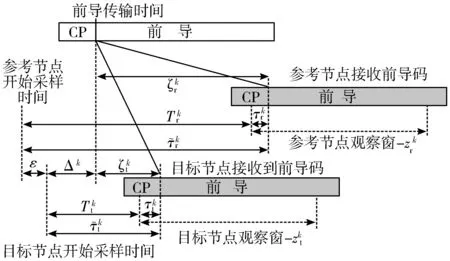
图3 时序图
(3)
(4)

对于表示法,f(x)表示x的概率密度函数,上标为*、T和H分别表示共轭、转置和共轭转置,符号diag(x),其中x=[x0,x1,…,xL-1],表示从左上角开始的对角线项为x0、x1、…、xL-1的对角矩阵。
2 基于非同步BSs传输定位算法
(5)
(6)
其中:
(7)

由图3和公式(8)、公式(9)可得到目标节点和参考节点的观测窗口内的TOA偏移量为:
(8)
(9)
ML的位置估计器可用以下公式计算:

(10)

在后一种假设下,使用公式(3)、公式(8)和公式(9)可得:

(11)
(12)

ψ(s,τ)=FHG(τ)Fs
(13)
其中,G(τ)是一个线性相移算子:
G(τ)=diag{1,ej2πτ/N,ej2π2τ/N,…,ej2π(N-1)τ/N}
将公式(12)与公式(13)代入公式(5)并利用F·FH=I,符号I表示单位矩阵,可得:
(14)
其中:
(15)

(16)
将公式(15)与公式(16)代入公式(14),可得:
(17)
其中:
当前导TOA与观测窗口的开始完全对齐时,观测窗口可接收无噪声样本。因而把公式(17)代入公式(16)可得:
(18)

(19)

(20)
(21)

3 无线定位仿真测试
为评估给出的目标节点位置估计器的性能,本文开发了相关测试系统(见图4)。该系统包括:3个802.11g Wi-Fi路由器(TP-LINK 150 Mbit/s无线路由器),它们被放置在室内环境中的已知位置并用作基站;2个通用软件无线电外围设备(USRP),其分别表示为USRP参考和USRP目标,它们是参考节点和目标节点;以及连接到个人电脑(PC)的Wi-Fi路由器[24]。USRP参考节点被放置在一个固定的已知位置,而USRP目标节点被放置在室内环境中的各种未知位置。
PC端Wi-Fi路由器与Wi-Fi路由器1之间通过网络连接,并将Wi-Fi路由器1和2配置为中继器工作,路由器1将其接收到的信号传送到路由器2,路由器2传送到路由器3,如图4所示。Ping命令由PC路由器发起并传送到路由器3,由于中继器的配置关系,Ping消息包也从路由器1、2和3发送。目标节点和参考节点USRP设备将从路由器接收到的信号下变频到基带,以25 MHz采样,并通过以太网链路将采样传输到PC。在PC上,对Wi-Fi数据包进行解码,并将来自具有相同BS标识号和相同数据包序列号的目标节点和参考节点的成对数据包传输到位置估计算法[25]。

图4 定位测试系统
所有的Wi-Fi路由器和USRP设备都不同步,因此路由器的传输时间也未知,并且2个USRP设备的采样时间之间存在未知的偏移量并以Ping包序列号作为包标识号。

4 测试结果分析
以下对于在2个室内环境中,用上述的测试系统获得的目标位置进行性能测试。第1个是图5所示的会议厅。会议厅面积约1500 m2,路由器和USRPs之间有视距,但也有反射物体造成多径,如混凝土墙、混凝土杆、家具,此外也有来自环境中人的反射。第2个测试环境为如图6所示的住宅公寓。住宅公寓有水泥墙和家具。3个Wi-Fi路由器(BSs)位置在图中用星号标记。参考USRP位置用圆形标记,并且有100个不同的目标USRP位置,它们大致均匀地分布在图片的灰色阴影区域中。
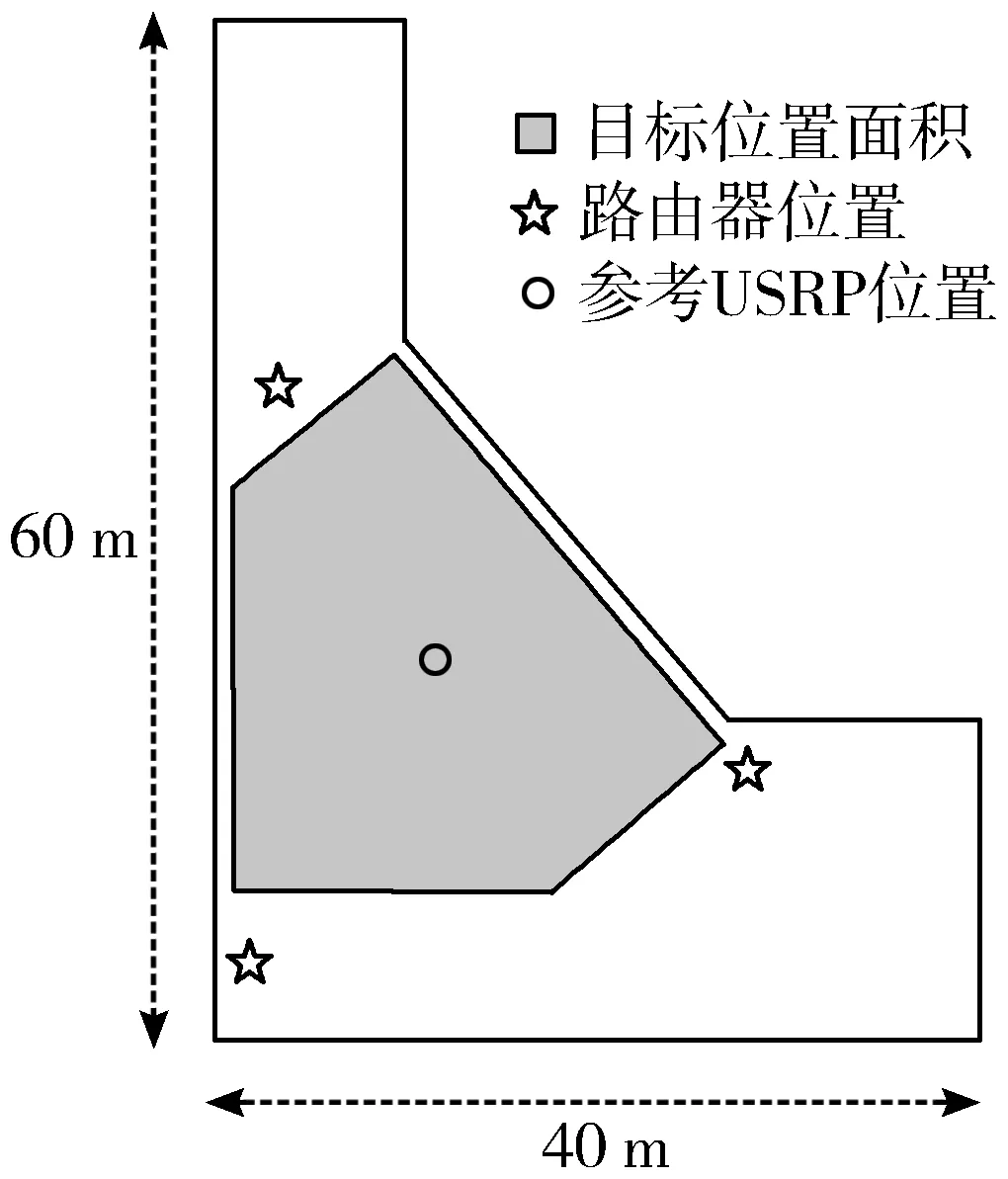
图5 会议厅试验场地示意图
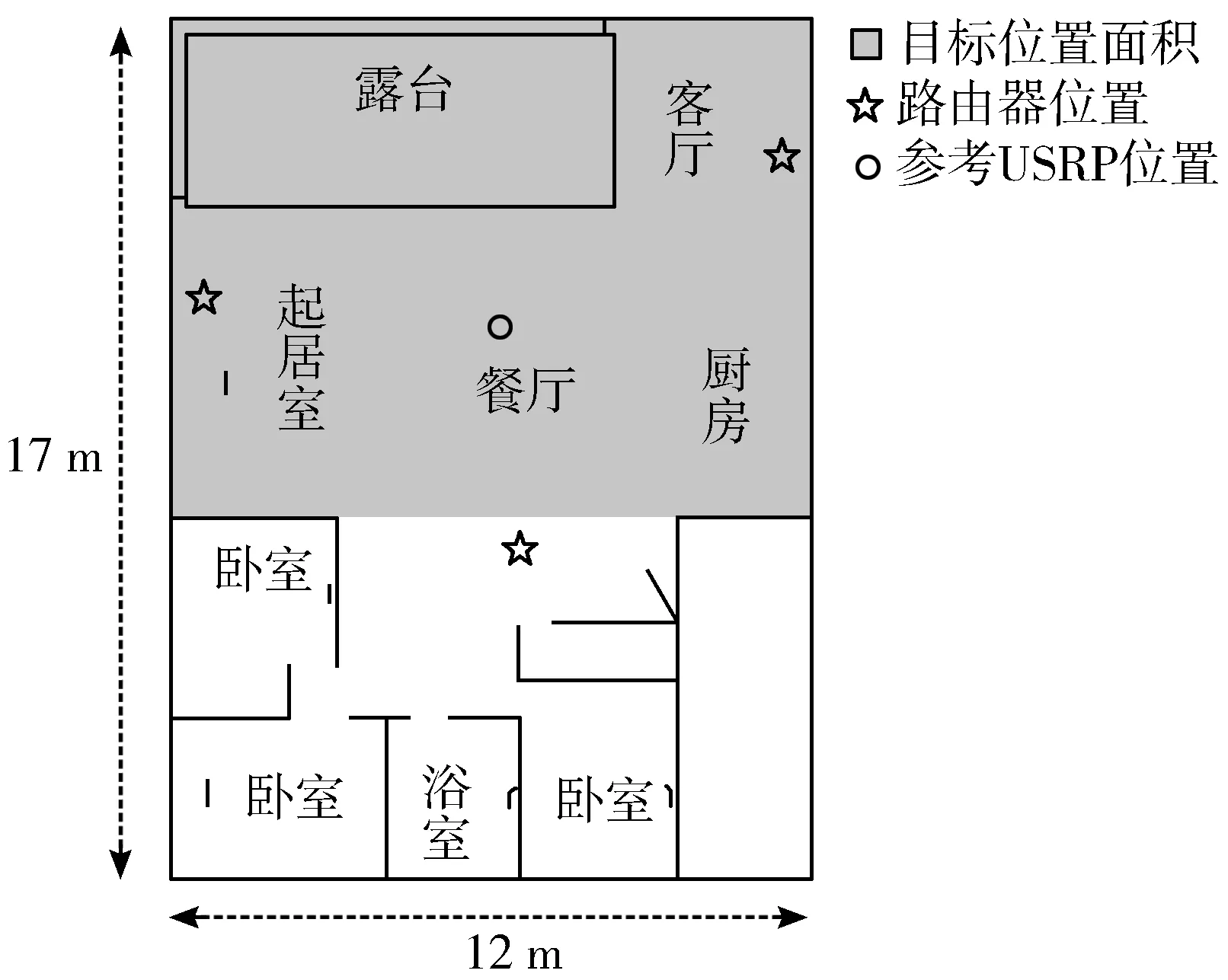
图6 住宅公寓试验场地示意图
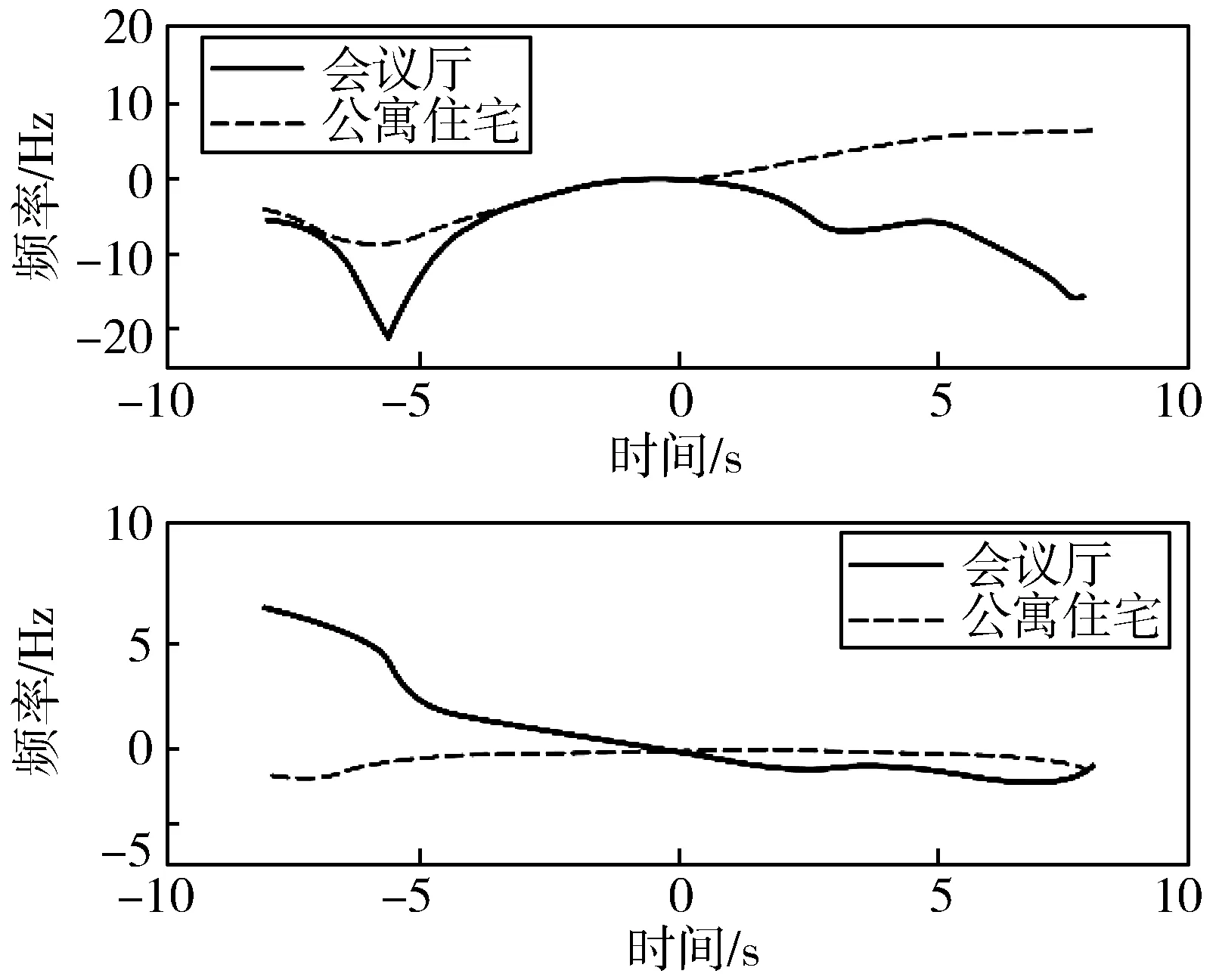
图7 会议厅和住宅公寓的信道频率

图8 会议厅和住宅公寓的信道脉冲
图9为2种测试环境下所提出的位置估计器误差范围的累积分布函数(CDF)。实验数据显示,针对会议厅和公寓住宅的2种测试环境下,当概率在0.1~0.9时,2种测试环境的误差均在3 m以内,其中公寓住宅环境下的误差整体小于会议室,概率超过0.9以后,误差值均增加,在4 m~6 m间。
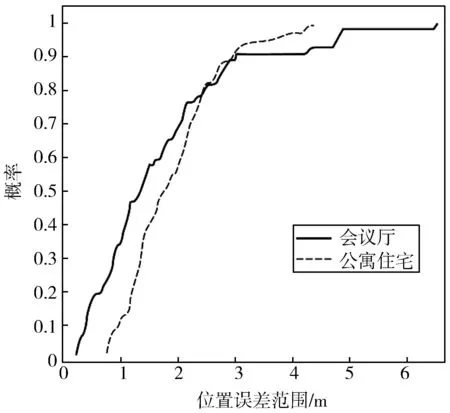
图9 位置估计误差
表1为测量的平均位置误差范围和分析的平均位置误差。通过对被测目标节点位置进行平均并取结果的平方根,得到解析平均位置误差范围。结果表明,分析平均误差范围略低于实测平均误差范围,但仍能很好地预测估计器的性能。
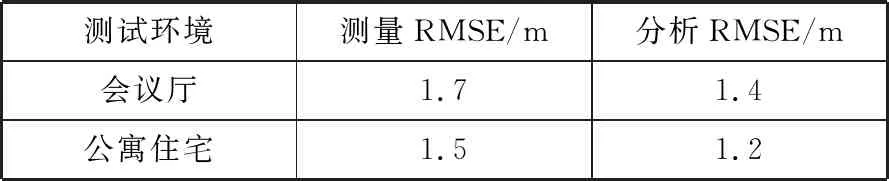
表1 位置估计平均误差范围
表2为本文估计器的平均测量位置误差范围(在2个测试环境中的平均值)与其他2种常用方法(“低多径”及双向传动法)的性能比较。这2种方法仅基于具有相似带宽的Wi-Fi 802.11信号的TOA测量,并在实际生活中的多路径环境进行测试。在TOA测量方法中,BSs是同步的,并且测试环境具有相对于多径的强视线分量(“低多径”)。在另一种参考方法中,BSs不同步,解决方案需要双向传输[26]。每种参考方法都在不同的多径环境和不同数量的BSs中进行了测试,因此性能可能有些不足。
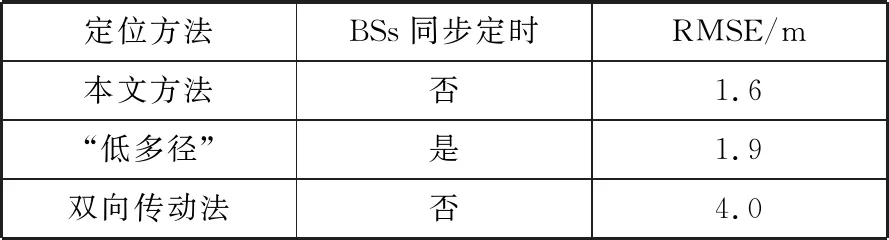
表2 不同参考方法的性能比较
在比照实验中选择文献[10]中提到的目前传统的低多径算法以及文献[27]中提到的在复杂多径环境下定位准确率相对较高的双向传动法进行对比实验。双向传动点位算法为刘潇等人在结合双向到达时间测量的基础上提出的一种目标定位算法。该算法为了解决周转时间时钟偏差以及直接处理无法得到最优解目标位置的问题,使用次优强健算法近似模拟,结合二分算法生成精确定位值。该算法虽然定位精度较高,但算法执行效能较差。对比本文提出的算法,不同算法的性能对比结果如表2所示。由表2可知,本文方法的评估精度提升了约1倍,同时不需要BSs同步,也不需要双向传输。
5 结束语
针对多径环境,本文提出了一种基于非同步OFDM信号的传输和接收目标节点位置估计算法。该算法能够相对准确地估计无线网络中设备的位置,而无需在基站中进行任何修改。此外,本文还对该估计器的性能进行了分析。在室内多径环境下,用已有802.11g Wi-Fi路由器对算法进行测试,在不修改路由器固件的情况下,平均位置误差范围为1.6 m,分析结果对估计性能能够很好预测。结果表明,与其他室内环境下的802.11信号实验相比,该方法较为精准且响应时间较短。
猜你喜欢
科教新报(2022年24期)2022-07-08
新高考·高二数学(2022年3期)2022-04-29
新高考·高二数学(2022年3期)2022-04-29
计算机与数字工程(2022年3期)2022-04-07
作文小学中年级(2021年10期)2021-12-26
科教新报(2021年23期)2021-07-21
恋爱婚姻家庭·养生版(2021年5期)2021-05-31
民用飞机设计与研究(2020年4期)2021-01-21
中学生数理化(高中版.高二数学)(2020年11期)2020-12-14
物联网技术(2018年8期)2018-12-06
