
改进的三帧差分运动目标识别算法
2022-05-05 07:22丁文龙
智能计算机与应用 2022年3期
丁文龙,尹 朵,邱 崧
(华东师范大学 通信与电子工程学院,上海 200241)
0 引 言
实时检测系统的特点,要求运动目标检测技术能正确、快速和完整地检测到运动目标,以便于后续操作。常用的运动目标检测算法有:帧间差分法、背景减除法、光流法,以及基于机器学习的模型匹配法。不同的检测算法各有其优缺点:帧间差分法计算量较小,可以很好地实现实时系统,但该算法容易出现空洞、拖影等问题;虽然背景减除法结构比较简单,但容易受到环境光线变换的影响;光流法可以在未知的场景下检测出运动目标,检测准确率较高,但是计算量较大,不能满足实时性要求;基于机器学习的模型匹配法可以很好地识别到物体、准确率高,但识别前需要先训练模型,而且结构较复杂,需要很强的处理器去运算。针对以上方法的缺点,也出现了很多的改进算法。Jun等提出混合高斯模型和帧间差分法,用来检测运动目标;Liu等提出了结合帧间差分法和光流法的目标检测算法;Liang等针对帧间差分法和背景减除法,对提取目标不完整易产生空洞问题,提出自适应双阀值的运动目标检测算法;Lu等提出将混合高斯模型和背景减除法相结合的运动目标检测算法;Cho等提出了混合高斯模型与光流估计相结合的运动目标检测算法。
综上所述,虽然这些算法在一定程度上完善了运动目标检测,但在高速运动物体检测中,随着摄像头帧率提高、运动物体在帧间运动距离有重叠的情况下,上述方法检测到的运动目标识别率较低,仍有运动物体检测不全的状况。为此,本文提出了改进型三帧差分法的运动目标识别算法。
1 三帧差分运动目标识别改进算法
帧间差分法是一种通过对视频序列中相邻两帧图像之间做差分运算,得到运动目标差分图像的方法。当运动物体进入摄像视野后,运动物体在帧与帧之间的位置信息差别较大,通过相邻帧图像之间相减后,进行绝对值操作得到差分图像。通过对差分图像进行阈值分割,提取得到运动物体的二值化图像。三帧差分法是在两帧差分的基础上改进而来,将相邻的三帧图像进行相邻帧两两差分后,通过逻辑运算得到最后的二值化图像。由于运动物体在相邻帧间图像运动存在快慢的区别,当运动物体相邻帧之间没有重叠时,不会出现“空洞”现象;但是当运动物体在相邻帧间有部分重叠时,重叠部分在差分后会表现出“空洞”现象。为了解决三帧差分法中的“空洞”现象,本文提出的改进方案原理如下:
获得摄像头序列连续的三帧图像f(,)、f(,)、f(,),这些图像均由R、G、B三通道组成,对应的数学关系如下:

其中,(x,y)表示图像(,)第行、第列的像素,(x,y)包含R、G、B 3个通道的值:(x,y)、(x,y)、(x,y),该值分别是第行、第列的R通道、G通道和B通道的像素值。
对相邻三帧的原始图像f(,)、f(,)、f(,)进行灰度化处理,得到灰度图像:L(,)、L(,)、L(,),灰度处理的数学公式为:

其中,(x,y)、(x,y)、(x,y)分别是原始图像(,)的R通道、G通道、B通道;每个通道前有一定的权重,将三维原始图像(,)合并成一维的灰度图像(,)。
计算相邻两帧的灰度图像(,)之间的差分图像(,),得到两幅差分图:(,)、(,),其转换公式如下:

对两幅差分图像(,)和(,)分别进行阈值分割,其数学表达式如下:

通过上述表达式,将得到的两幅图像进行阈值分割处理得到(,)和(,)的二值化图像;对二值化图像(,)进行形态学膨胀处理,得到F(,),其原理表达如下:

其中,()是形态学的膨胀操作。
将膨胀后的差分二值化图像(,)和(,)进行逻辑“与”,得到膨胀处理后的目标二值化图像F(,):

之后,对F(,)进行腐蚀操作得到F(,),其原理表达如下:

其中,()是形态学的腐蚀操作。通过该操作得到最终的F(,)目标二值化图像。
本文提出的改进算法是根据出现的“空洞”现象,在未进行差分图像二值化“与”操作之前,采用形态学的膨胀操作,将图像中出现的“空洞”地方进行填充;进行“与”操作之后,再通过形态学的腐蚀操作,将运动目标区域面积变为原来的大小,最终得到准确的运动目标区域。
2 实验对比
对于本文提出的算法,利用高速运动的乒乓球,来验证算法在处理实际场景中的情况。在乒乓球高速运动的真实情况下截取连续三帧图像,如图1所示。图像采集设备选用USB工业摄像头,帧率为120 fps,图像尺寸是640∗480,图像格式为JPEG格式。
针对连续三帧的真实场景图像,经过相同的预处理操作后,得到灰度图像。分别使用传统的三帧差分法和本文提出的算法进行处理,处理的结果如图1所示,两种算法对比结果如图2所示。
由图2(a)中可以看到,运动的乒乓球形状前后都丢失了一部分,这就是由于差分图像时出现的“空洞”现象;图2(b)是原始图像锁定的乒乓球位置图像;图2(c)是采用本文提出的算法得到的结果图像,相比较传统的三帧差分法得到的结果图,白色部分的运动乒乓球轮廓比较圆滑,球型大小和真实大小基本相同,表明本文算法可以很好的消除图像在差分时出现的“空洞”现象,提高了运动目标检测的准确性。

图1 连续三帧的原始图像Fig.1 Original image of three consecutive frames
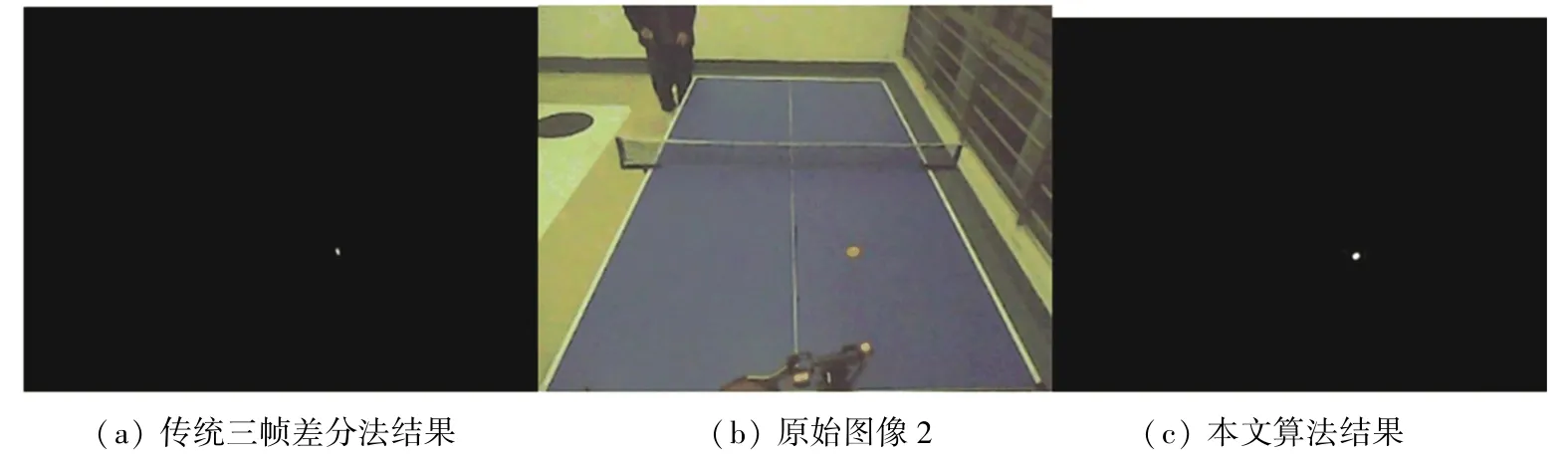
图2 结果对比Fig.2 Result comparison chart
3 结束语
本文根据传统的三帧差分法容易出现“空洞”现象的缺点,提出了一种改进的三真差分法的运动目标检测算法。实验结果表明文本提出的方法可以很好的消去“空洞”现象,对运动目标检测更加准确和完整,整体的计算比较简单,可以实现实时性处理,这为后面的实时识别系统打下了良好的基础。
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
集装箱化(2021年1期)2021-04-12
经理人(2020年9期)2020-10-12
科学24小时(2020年6期)2020-07-18
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
中国信息技术教育(2020年2期)2020-02-02
上海师范大学学报·自然科学版(2018年3期)2018-05-14
价值工程(2017年28期)2018-01-23
计算机应用(2016年10期)2017-05-12
故事作文·高年级(2017年2期)2017-03-01
