
弹性地基圆形加肋板静力弯曲及弯曲自由振动分析的无网格法
2022-05-04 05:18彭林欣谌亚菁杨健生
振动与冲击 2022年7期
彭林欣, 谌亚菁, 覃 霞, 杨健生
(1.广西大学 土木建筑工程学院,南宁 530004; 2.广西大学 广西防灾减灾与工程安全重点实验室,南宁 530004; 3.广西大学 工程防灾与结构安全教育部重点实验室,南宁 530004)
加肋板因其刚度高、重量低的特点,被广泛应用于房屋建筑、桥梁、船舶、航空及航天等工程领域,常见于地基板、路面板、机场跑道、船舶壁板等部位。因此,针对加肋板结构力学性能的研究受到了学者和工程技术人员的高度重视。一些特殊建(构)筑物,如水塔、烟囱、筒仓等,基础形式大多采用加肋多边形板或圆板,设计荷载较小时也可采用不加肋的形式。对于不加肋的平板式基础,一般取弹性地基上的圆板作为力学模型。国内外学者对弹性地基上圆板计算分析开展了深入研究,如王超刚[1]利用Ritz法研究了中心受集中力作用的自由放置在弹性地基上圆板的弯曲问题,并获得了该问题的解答。Wang等[2-4]通过引入非轴对称屈曲模态正确计算了弹性地基圆板的屈曲荷载,并进一步研究了弹性地基上同心铰接或带裂纹圆板的屈曲问题。何芳社等[5]将与板相关的各力学量展开为Fourier-Bessel级数,利用解析法对弹性圆板下横观各向同性弹性地基的轴对称问题进行了分析。Starovoitov等[6-7]研究了弹性地基上层合圆板在突发局部荷载作用下的轴对称振动问题及周期荷载作用下的共振问题。裴昭等[8]研究了横向轨迹动载作用下弹性基础上各向同性圆薄板在弹性约束下的动力响应问题。
除了弹性地基上的平板外,国内外学者对弹性地基加肋板亦进行了大量研究。金康宁等[9-10]用边界元法处理弹性地基上的薄板,用有限元法处理加肋板上的肋梁,利用肋梁结点处力的平衡和位移的协调关系进行耦合求解。蔡健等[11]将弹性地基上的加肋板视为十字交叉梁与平板的组合体系,通过梁、板、地基三者之间的力与位移平衡和协调分析,得出了梁板式筏基与地基共同作用的半解析解。Lee等[12-13]基于Mindlin板理论,采用有限元法分析了弹性地基上加肋板的动力特性。对于加肋板而言,采用有限元法进行分析时需要肋条沿板网格线布置。当肋条位置改变时,板的单元也要重新划分以保证肋条与网格线的重合。
无网格法[14-15]是近年来兴起的一种数值分析方法。不同于有限元法,无网格法的近似函数是建立在一系列离散点上的,不需要借助于网格,克服了有限元法对网格的依赖性。有限元线性单元的直边不能承受弯曲荷载,分析过程可能会出现剪切闭锁,无网格法没有单元概念,可以有效避免剪切闭锁。在涉及网格畸变、网格移动等问题中无网格法显示出明显的优势,容易进行自适应分析,因而被广泛应用于碰撞、动态裂纹扩展、金属加工成型、流体力学以及其它领域中[16]。不少研究者已成功应用无网格法对加肋板进行分析,例如Liew等[17]采用基于一阶剪切变形理论的无网格伽辽金法研究加肋折板在不同载荷和边界条件下的弹性弯曲行为;Tamijani等[18-19]采用无网格伽辽金法分析了曲线加肋板及功能梯度板的自由振动;Sadamoto等[20-21]提出了一种有效的伽辽金无网格扁壳公式用于分析加肋板结构的弯曲问题;彭林欣[22-23]在一阶剪切变形理论的基础上建立了矩形加肋板的无网格模型,并研究了加肋板的弯曲和振动等问题。
目前采用无网格法对地基板的研究较少,大多集中在对板壳结构自身力学性能的分析[24-29],而考虑地基作用的不多。对于此类问题的分析主要有:熊渊博等[30-31]用无网格局部Petrov-Galerkin(MLPG)方法分析了Winkler弹性地基上正交各向异性板的弯曲问题。夏平等[32-34]采用无网格局部径向点插值方法(LRPIM)研究了双参数弹性地基中厚板的静力弯曲问题。Shams等[35]用再生核质点法(RKPM)研究了Winkler-Pasternak弹性地基上碳纳米管增强复合材料层合板在面内载荷作用下的屈曲行为。覃霞等[36-39]利用无网格法分析了弹性地基上矩形加肋板以及斜肋板的振动特性,并对弹性地基加肋板肋梁进行优化分析。对于弹性地基圆板,曾祥勇等[40]基于Mindlin中厚板理论,建立了Winkler 地基上圆形厚板弯曲挠度的无单元伽辽金法(element-free Galerkin method, EFGM)求解控制方程;肖勇刚等[41]基于EFGM分析了集中载荷作用下弹性地基圆板的弯曲问题。
综上所述,鲜见文献采用无网格法研究弹性地基加肋板线性弯曲的静力和振动问题,特别是对圆形加肋板。本文利用无网格法的优势,基于一阶剪切理论和移动最小二乘法(moving least squares, MLS),提出分析弹性地基圆形加肋板线性弯曲的静力和自由振动问题的无网格伽辽金法。首先,采用一系列离散点建立弹性地基圆形加肋板的力学模型,并通过肋条与平板的位移协调条件导出两者节点参数转换方程;其次,分别通过最小势能原理和哈密顿原理建立静力弯曲和弯曲振动的控制方程;最后,采用完全转换法处理边界条件。文中以不同几何尺寸、材料参数、荷载分布、肋条布置形式的弹性地基圆形加肋板为例,将本文解与ABAQUS有限元解及文献结果进行比较分析,并研究了影响域及离散节点个数对计算结果的影响。研究表明,该方法能有效地分析弹性地基圆形加肋板线性弯曲的静力及自由振动问题,且具有计算稳定性好、结果易于收敛等优点。
1 弹性地基圆形加肋板弯曲的静力与自由振动的无网格列式
无网格法采用点来离散计算模型,避免了单元的划分。由此,本文基于无网格伽辽金法提出圆形弹性地基加肋板的无网格模型,计算其线性弯曲的静力及自由振动问题。
1.1 弹性地基加肋板的无网格模型
一弹性地基圆形板如图1所示,其中R、hp、hs和ts分别为圆板平板半径、板厚、肋条高和肋条宽,λ为弹性地基系数。在本研究中,圆形平板和肋条为均质材料,弹性模量和泊松比分别记为E、μ。圆形加肋板为圆形平板与肋条的组合结构,两者在交接处位移协调。弹性地基采用Winkler地基模型,以弹性模拟。本文基于无网格法,分别采用一系列点来离散圆形平板和肋条,平板节点数记为n,肋条节点数为m,平板与肋条采用独立坐标系,具体如图2所示。
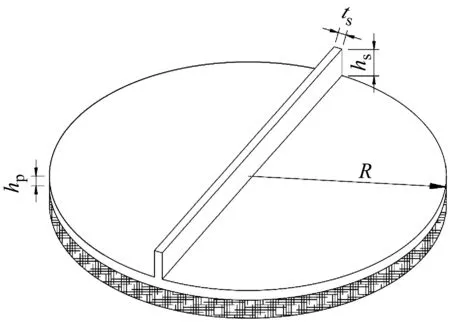
图1 弹性地基上的圆形加肋板
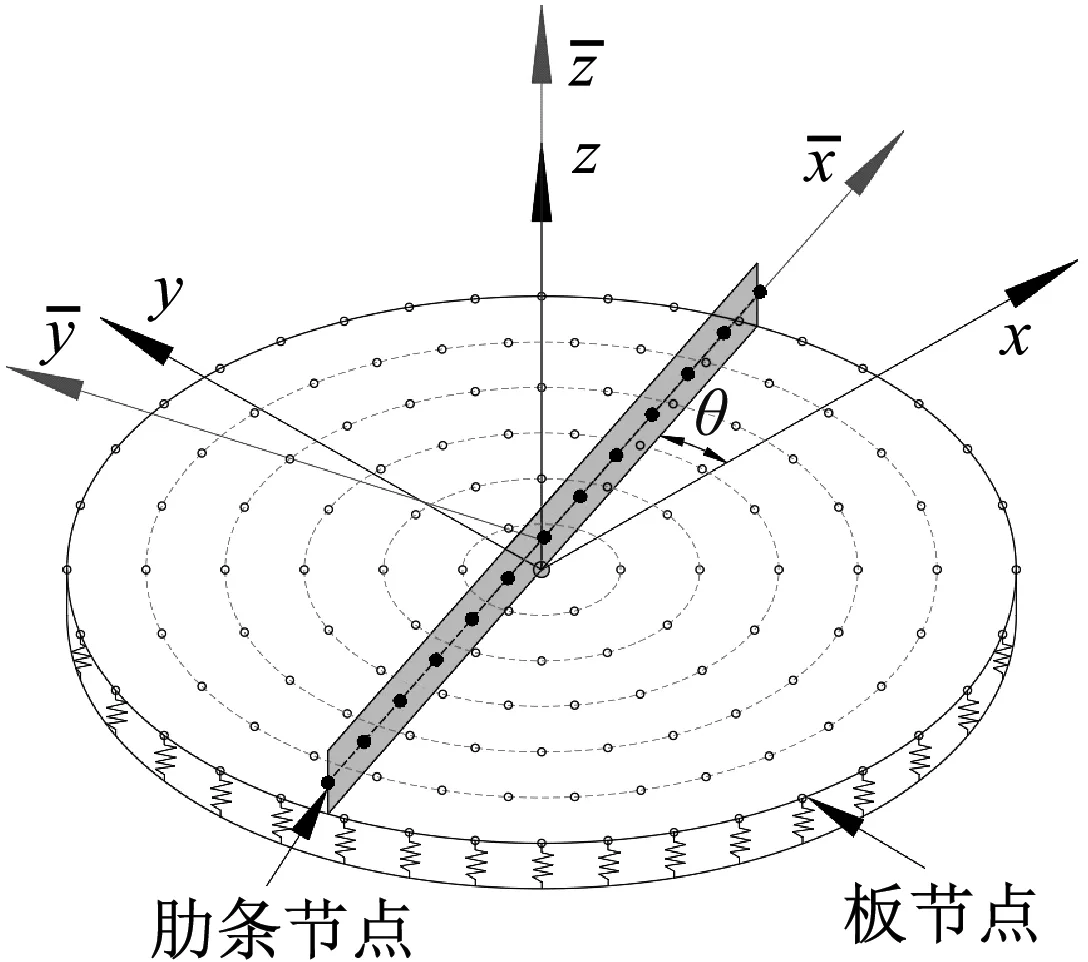
图2 弹性地基上圆形加肋板的无网格模型
1.2 圆形平板和肋条的位移场
圆形平板包含5个自由度up、vp、p、φpx和φpy,其中前3个分别为沿着x、y、z轴的平动位移,后两者分别为绕着y、x轴的转角。采用移动最小二乘法[42]建立形函数,根据一阶剪切理论[43],圆形平板的位移场可近似为
(1)
用矩阵形式
(2)
式中:[u0pI,v0pI,pI,φpxI,φpyI]T=ΔpI为圆形平板节点参数;φpx、φpy与p完全独立。

(3)
或写成矩阵形式
(4)
式中:[u0sI,sI,φsI]T=ΔsI为肋条节点参数;φsI与sI完全独立。
1.3 圆形平板与肋条的位移协调方程
如图3所示,肋条任一点S,必定在平板上存在对应点P(在整体坐标系xyz中,P与S的xy坐标相同,P可以是板上任意点,不一定属于板上的离散点),C点为P、S两点连线与板面的交点。对于同心肋条三点重合。根据C点的位移协调条件,有:
图3 位移协调示意图
p=s
(5)
φpxcosθ+φpysinθ=φs
(6)
upcosθ+vpsinθ=us
(7)
由式(5),(6)和(7),可得
(8)
(i=1,…,m)
(9)
(10)
根据移动最小二乘法,式(5),(6)和(7)可写成
(11)
(12)
(13)
将式(11),(12)和(13)写成矩阵形式
TpΔp=TsΔs
(14)
其中:
Δp=[u0p1v0p1p1φpx1φpy1u0p2v0p2p2φpx2φpy2…u0pnv0pnpnφpxnφpyn]T,
Δs=[u0s1s1φs1u0s2s2φs2…u0smsmφsm]T,
由式(14)可推出
Δs=TspΔp
(15)
其中:
(16)
对式(15)关于时间求导可得
(17)
综上所述,通过肋条与平板的位移协调条件可将肋条节点参数转换成板节点参数,转换方程为式(15)。当肋条位置改变时,只引起矩阵Tsp的改变,因此只需要重新计算该矩阵。
1.4 圆形加肋板与弹性地基的接触势能
假定弹性地基与圆形加肋板紧密接触,则两者的位移满足连续条件。设基床反力系数为λ,则接触力势能可表示为
(18)

1.5 弹性地基圆形加肋板弯曲的自由振动控制方程
根据1.2节圆形平板的位移场,其面内应变可表示为
(19)
面外应变为
(20)
其中:
从而可以导出圆形平板的势能
(21)
其中:
Δp=[Δp1Δp2…Δpn]T,

同样,圆形平板的动能为
(22)
式中:
对于肋条,其应变表示为
(23)
(24)
式中:
从而可导出肋条的势能
(25)
式中:
Δs=[Δs1Δs2…Δsm]T,
As为肋条截面面积。同样,肋条的动能表示为
(26)
式中:
叠加式(18)、(21)、(25),整个弹性地基圆形加肋板的势能可表示为
(27)
叠加式(22)、(26),其总动能可表示为
(28)
由式(15)、(17)给出的转换方程,整个圆形加肋板的势能和动能可分别表示为
(29)
(30)
式中:
由Hamilton原理可导出结构的自由振动控制方程
(31)
进而结构的自振频率由以下方程求出
(K-ω2M)Δp=0
(32)
1.6 弹性地基圆形加肋板的静力弯曲控制方程
如图4所示,一弹性地基圆形加肋板受面外荷载q(x,y)作用,该外力做的功为
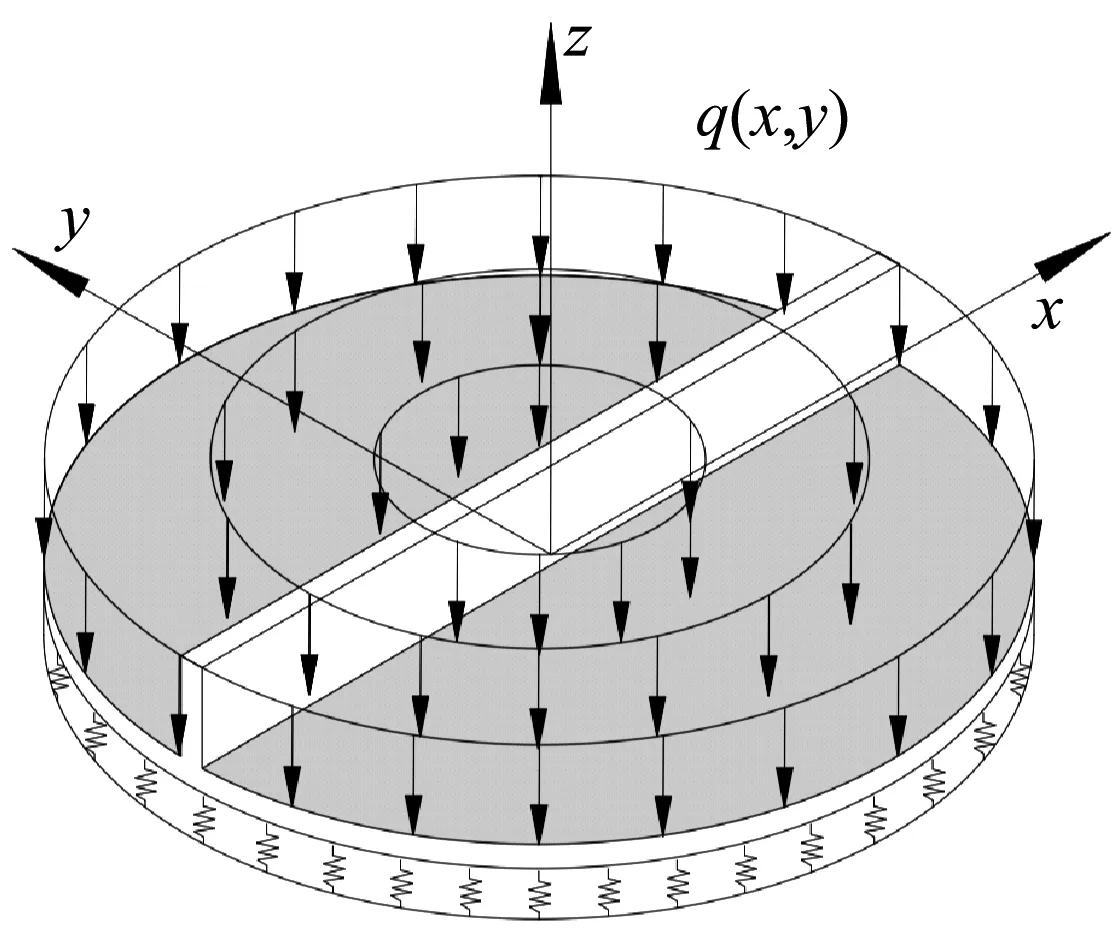
图4 弹性地基圆形加肋板受面外荷载作用
=∬q(x,y)pdxdy
(33)
根据MLS可写成
(34)
其中:
叠加应变势能和外力势能(外力做功的相反数),有总势能
(35)
由最小势能原理δΠ=0可导出弹性地基圆形加肋板的静力弯曲控制方程如下
KΔp=f
(36)
2 算例分析
2.1 收敛性分析
采用不同节点离散方案分析本文方法的收敛性。对一铰接弹性地基单肋条圆形加肋板做自由振动分析。板与肋条材料相同,材料和几何参数为E=17 MPa,μ=0.3,R=0.5 m,hs=0.1 m,hp、ts均为0.01 m,λ= 4.0×104N/m3,ρ=1 000 kg/m3。背景网格尺寸均为0.12 m×0.12 m。
2.1.1 节点离散方案
如图5所示,为确定统一的节点离散方案,将圆板分成n个同心圆,每个圆有6n个节点,肋条有2n+1个节点。影响域扩大系数dmax定义为
其中:r是节点的支撑半径;dmax表示影响域的大小。在本算例中,dmax取值为4.0。用不同的节点离散方案获得的前4阶自振频率如表1所示。其收敛曲线如图6所示。研究表明,当n大于6时,计算结果趋于稳定,可认为该节点离散方案使计算收敛。
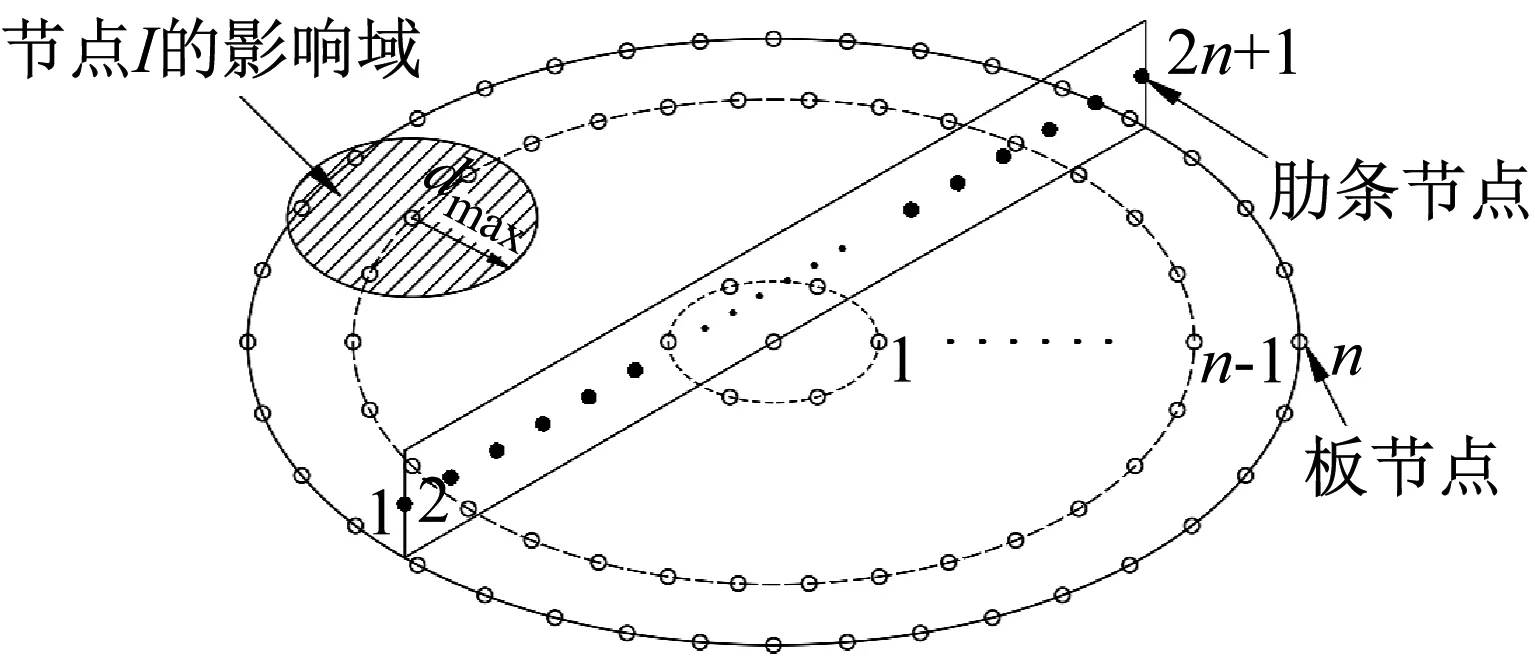
图5 圆形加肋板的节点离散方案

表1 不同节点离散方案下弹性地基单肋条圆板的频率
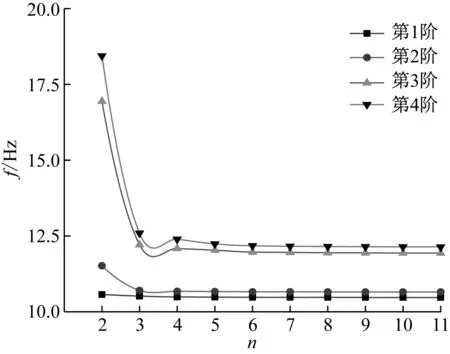
图6 不同节点离散方案下弹性地基单肋条圆板频率随离散阶数的变化
2.1.2 影响域
在本算例中,圆板用169个节点离散,肋条用15个节点离散,即n为7。在不同dmax下获得的自振频率如表2所示。前4阶自振频率随dmax的增加而变化的趋势如图7所示。研究表明, 当dmax的取值大于3.0时,计算趋于稳定。
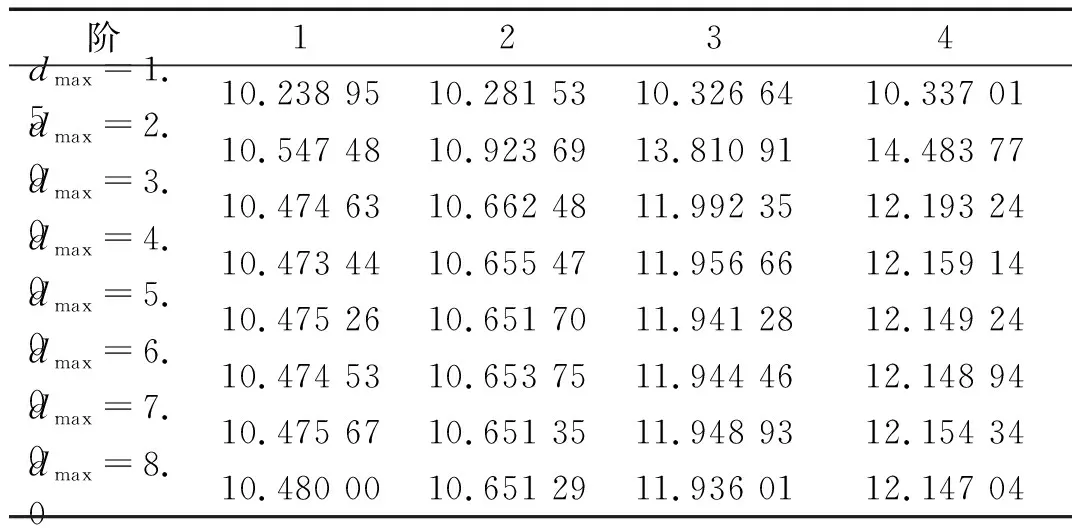
表2 不同dmax下的弹性地基单肋条圆板频率

图7 弹性地基单肋条圆板在不同dmax下的频率
通过对算例分析可知,本文方法收敛性好。当圆板采用169个节点规则离散(即n=7)及dmax的取值在3.0~6.0之间的节点离散方案可给出满意的计算结果。
2.2 有效性分析
采用上述无网格方法对弹性地基圆板进行自由振动分析。一弹性地基上的自由圆板的几何和物理参数为:半径R=1.0 m,板厚hs=0.1 m,弹性模量E=1.166 7×1010Pa,泊松比μ=0.166 7,密度ρ=2 460 kg/m3,基床系数λ=1.0×107N/m3。将本文方法计算得到的自振频率与文献[44]进行对比,结果如表3所示。
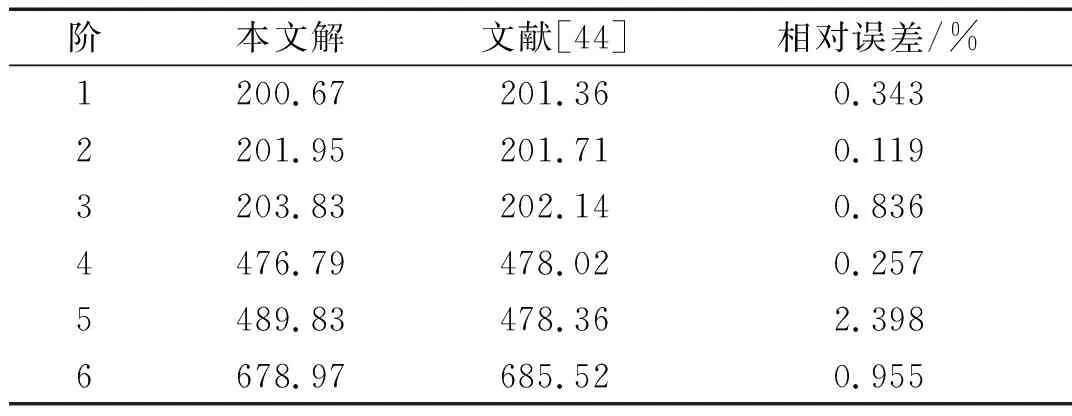
表3 弹性地基上的自由圆板的频率
采用上述无网格方法对弹性地基圆板进行静力弯曲分析。弹性地基上圆板作用一轴对称圆形均布荷载,荷载作用半径为0.18 m,均布力集度q为1 000 kN/m2,λ=5×104kN/m3,E=2.45×107kN/m3,μ=1/6,圆板半径为1.35 m,板厚hs为0.25 m。将本文方法计算得到的挠度与文献[45]的结果进行对比,如表4所示。
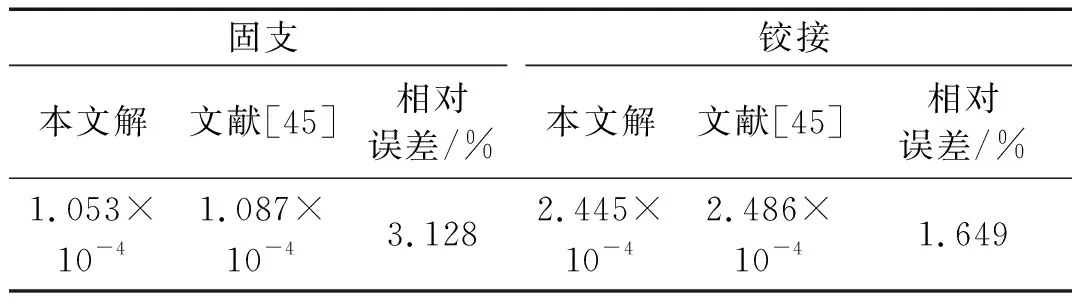
表4 弹性地基圆板受载的静力挠度
结果表明,本文解与现有文献解非常接近,相对误差均在工程允许范围内。从而验证了本文方法的有效性。
2.3 弹性地基圆形加肋板的自由振动分析
2.3.1 弹性地基单肋条圆板的自由振动分析
在本算例中,一完全固支的弹性地基单肋条圆形加肋板的几何参数为R=1.0 m,hp=0.012 m,hs=0.1 m,ts=0.01 m。板和肋条均采用相同的材料,E=206 GPa,μ=0.3,ρ=7 850 kg/m3,λ=6.0×104N/m3。圆板用169个节点离散,肋条用15个节点离散。同时,用ABAQUS软件对圆形加肋板进行三维建模,分析其自振频率。用S4R单元模拟圆板和肋条。将本文方法计算得到的解与ABAQUS的结果进行比较,结果如表5和图8所示。用本文方法和ABAQUS得到的弹性地基圆形加肋板的第1阶振型图如图9和图10所示。

表5 弹性地基圆形平板和加肋板的频率

图8 本文频率解与ABAQUS的频率结果对比

(a) 圆形平板

(a) 圆形平板
结果表明,本文解和有限元解的相对误差都小于5%, 充分证明了本文方法的有效性和准确性。此外,从数据可以看出,加肋板的频率明显大于平板,这表明肋条对平板具有一定的约束作用。
2.3.2 弹性地基双肋条圆板自由振动分析
一弹性地基上的双肋条圆形加肋板如图11所示,其几何参数为R=1.5 m,hs=0.12 m,hp、ts均为0.015 m,肋条的材料和板相同,材料参数为E=29.8 GPa,μ=0.2,λ=5.0×104N/m3,ρ=2 549 kg/m3。圆板采用169个节点离散,肋条采用15个节点离散。不同边界条件下弹性地基圆形加肋板的自振频率如表6所示。将其与ABAQUS的结果进行了比较,相应的结果对比曲线如图12所示。用本文方法和ABAQUS得到的弹性地基双肋条圆形加肋板的第1阶振型分别如图13和图14所示。
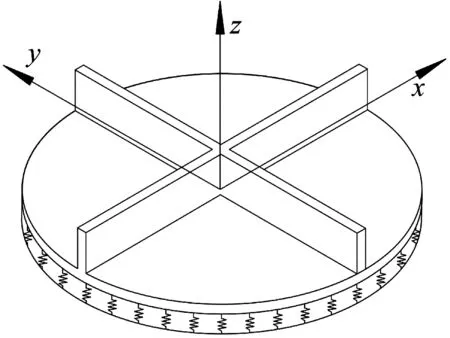
图11 弹性地基双肋条圆形加肋板
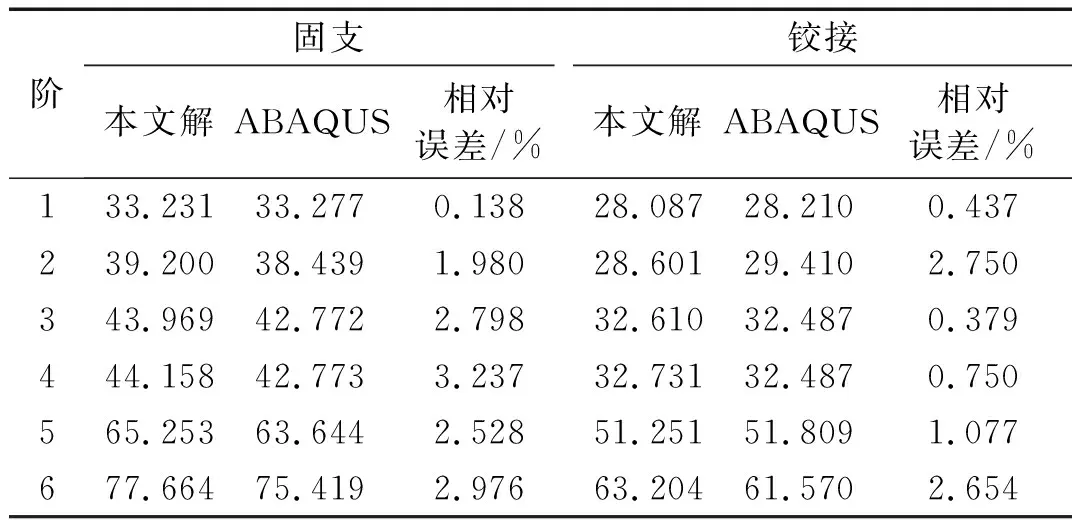
表6 不同边界下弹性地基圆形加肋板的频率

图12 本文频率解与ABAQUS的频率结果对比

(a) 固支
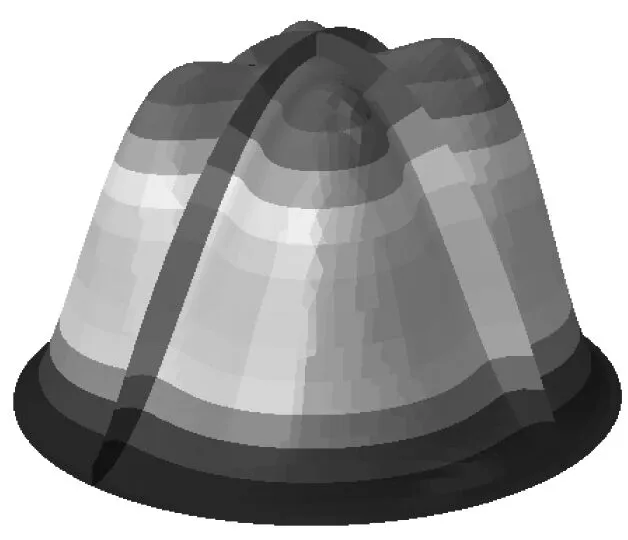
(a) 固支
如果肋条位置发生变化(图15),本文方法无需重新布置圆板和肋条的节点,仅需重新计算式(14)中的矩阵TP。而在ABAQUS计算中,所有的有限元网格都需要重构。两种方法计算得到的肋条位置改变时弹性地基圆形加肋板的自振频率如表7所示,两种方法得到结果的一致性较好。由于本文方法在肋条位置改变后无需重新布置节点,故适用于肋条位置的优化。在肋条位置的数千次优化尝试中,省去了繁杂的网格重置工作,从而可见该方法在肋条位置重分布的结构优化计算方面具有很大的优势。

图15 肋条位置改变的弹性地基圆形加肋板

表7 肋条位置改变的弹性地基圆形加肋板频率
2.4 圆形加肋板的静力弯曲分析
2.4.1 铰接单肋条圆板的静力弯曲分析
一铰接弹性地基单肋条圆板如图16所示,其几何和材料参数为R=1.4 m,hp=0.03 m,hs=0.3 m,ts=0.02 m,弹性模量E和泊松比μ分别为29.8 GPa和0.2,λ=6.0×104N/m3。结构受均布荷载集度大小为3 Pa。平面圆板采用169个节点离散,肋条采用15个节点离散。为了验证肋条的作用,对相同尺寸的弹性地基无肋条圆板也进行了研究。板沿y=0方向的挠度计算结果如表8所示。用本文方法和ABAQUS得到的位移云图分别如图17和图18所示,相应的结果对比如图19所示。结果表明,本文解与有限元解非常接近。此外,加肋板的挠度明显小于无加肋平板,这意味着肋条起到了一定的约束作用。
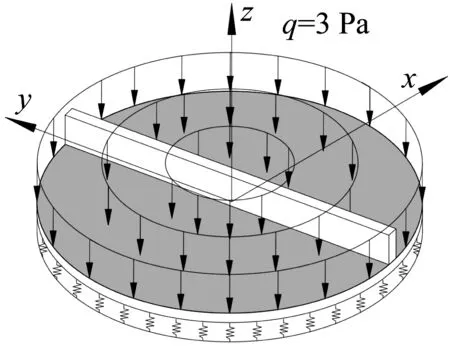
图16 受均布荷载作用下的弹性地基圆形加肋板
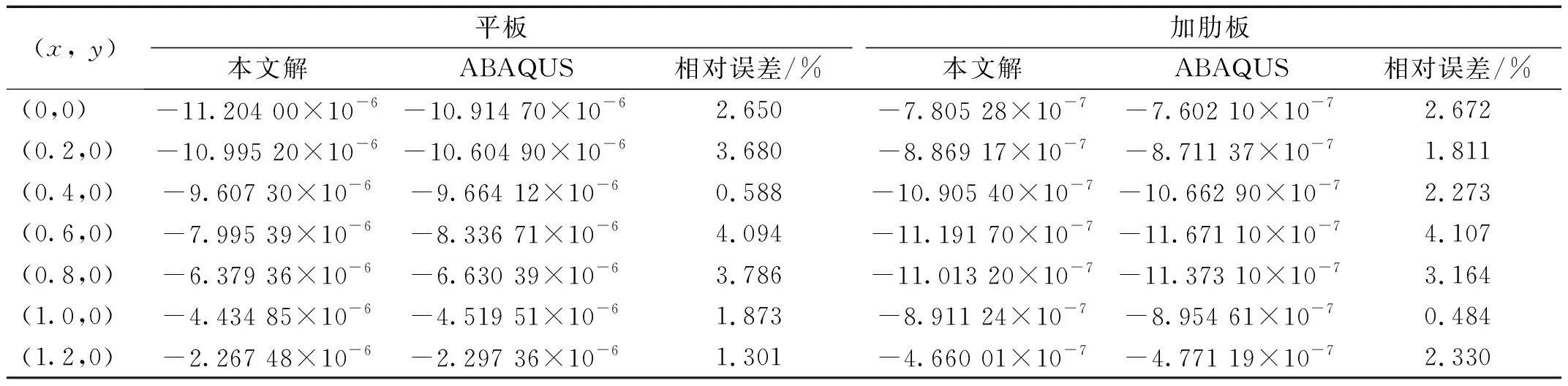
表8 弹性地基加肋板沿y=0方向的挠度
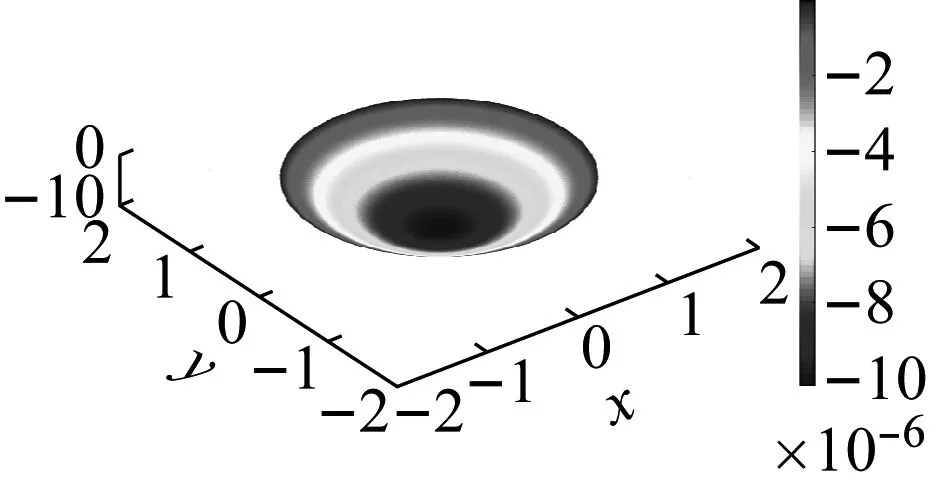
(a) 圆形平板
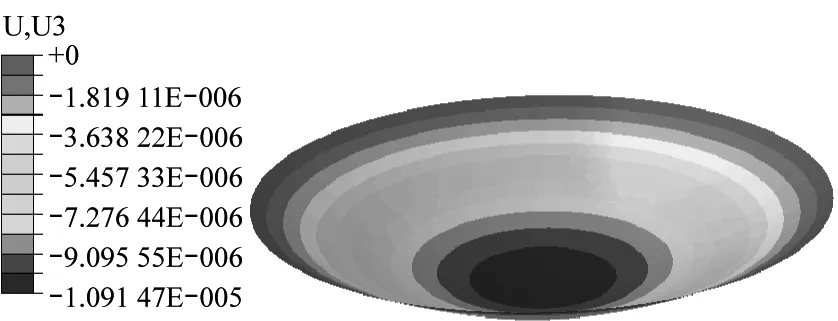
(a) 圆形平板
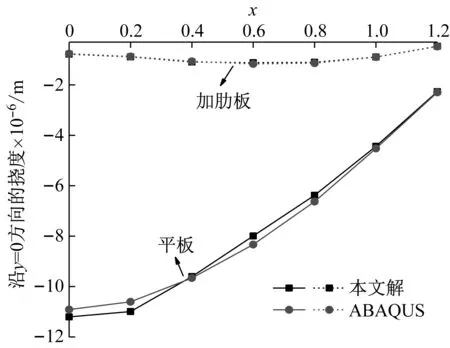
图19 本文挠度解与ABAQUS的结果对比
2.4.2 弹性地基双肋条圆形加肋板的静力弯曲分析
为了进一步验证本文方法在弹性地基圆形加肋板静力分析中的有效性,将两个双肋条圆板分别固支与铰接,如图20所示。它们的几何参数为R=0.7 m,hs=0.15 m,hp、ts均为0.02 m。材料参数为:杨氏模量E和泊松比μ分别为17 MPa和0.3,λ=4.0×104N/m3。弹性地基加肋板受局部均布荷载q=2 Pa。将169个节点用于离散平板,15个节点用于离散每一根肋条。板沿y=0方向的挠度计算结果如表9所示。用本文方法和ABAQUS得到的位移云图分别如图21及图22所示,相应的结果对比如图23所示。
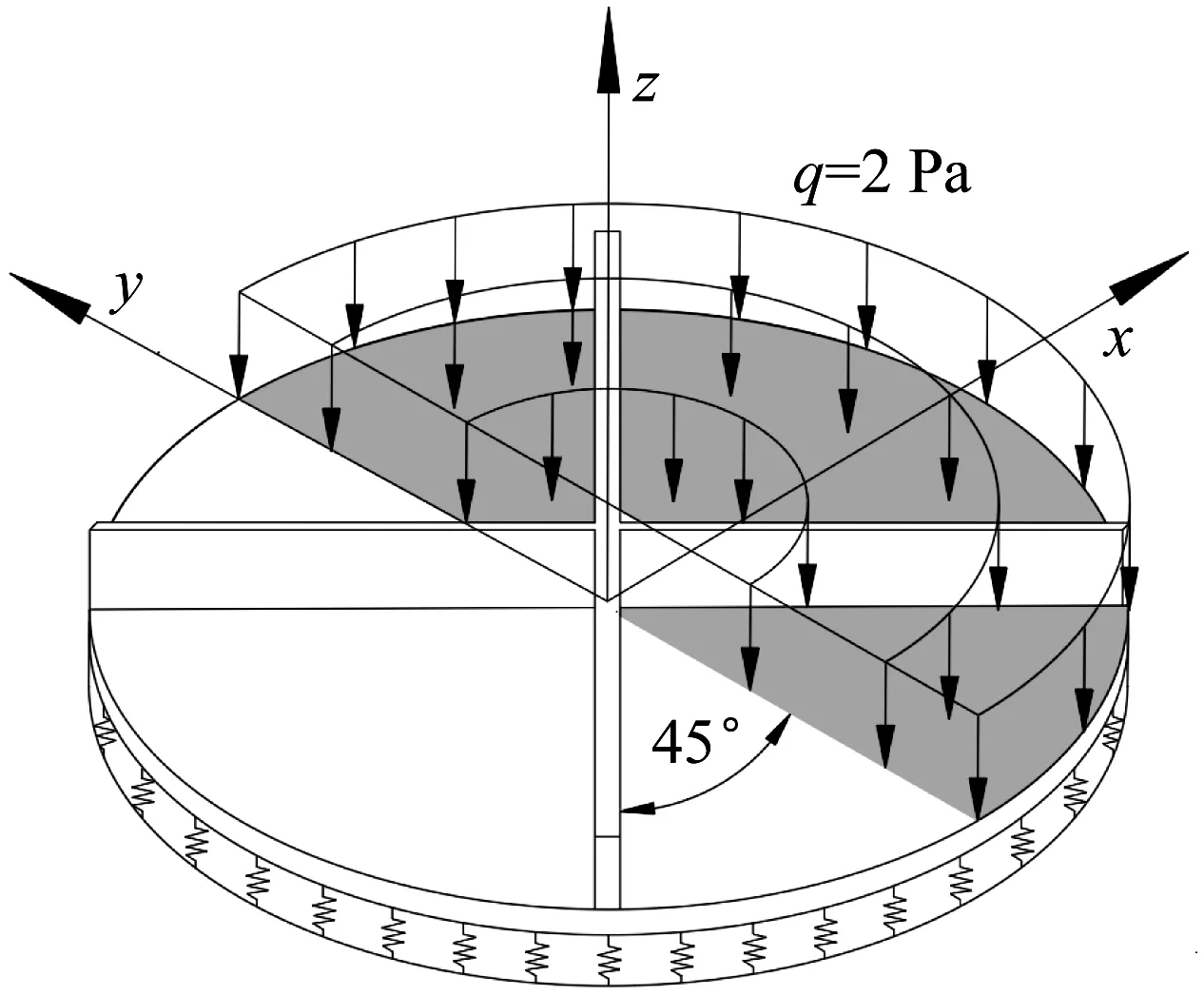
图20 弹性地基双肋条圆板受局部均匀荷载
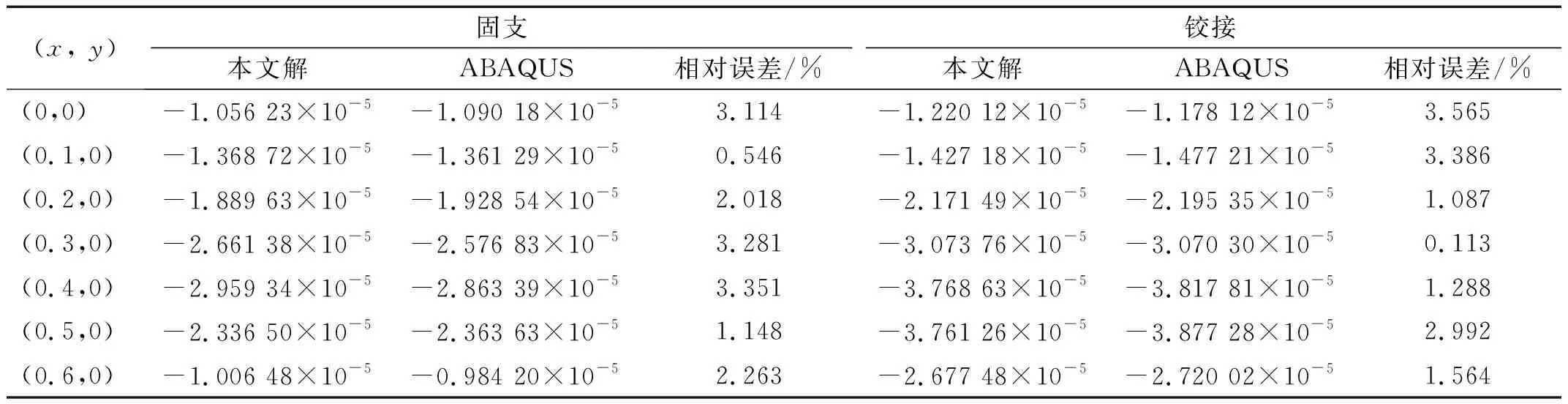
表9 弹性地基加肋板沿y=0方向的挠度

(a) 固支
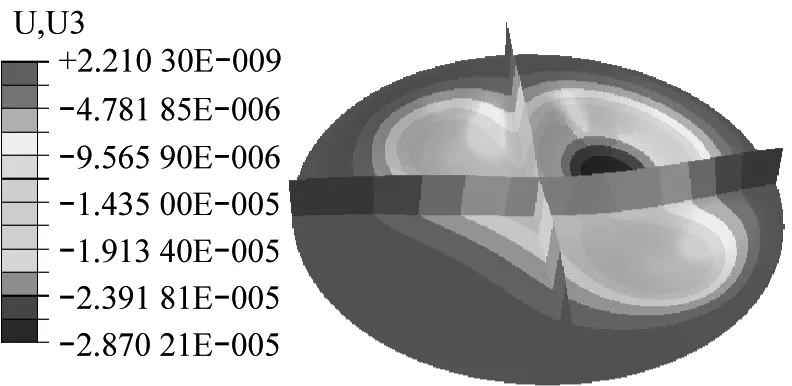
(a) 固支

图23 本文解与ABAQUS的挠度对比
结果表明,本文解与有限元解非常接近。另外,从计算结果也可以看出,完全固支的加肋板挠度明显小于铰接加肋板的挠度,这表明了不同边界条件具有不同的约束作用。
如果肋条位置发生变化(图24),本文方法无需重新布置板和肋条的节点,只需重新计算式(14)中的矩阵TP即可重新计算板的挠度(表10)。而在有限元法中,所有网格都需要重新划分。该算例表明,本文方法可用于局部均布荷载作用下的肋条位置优化。
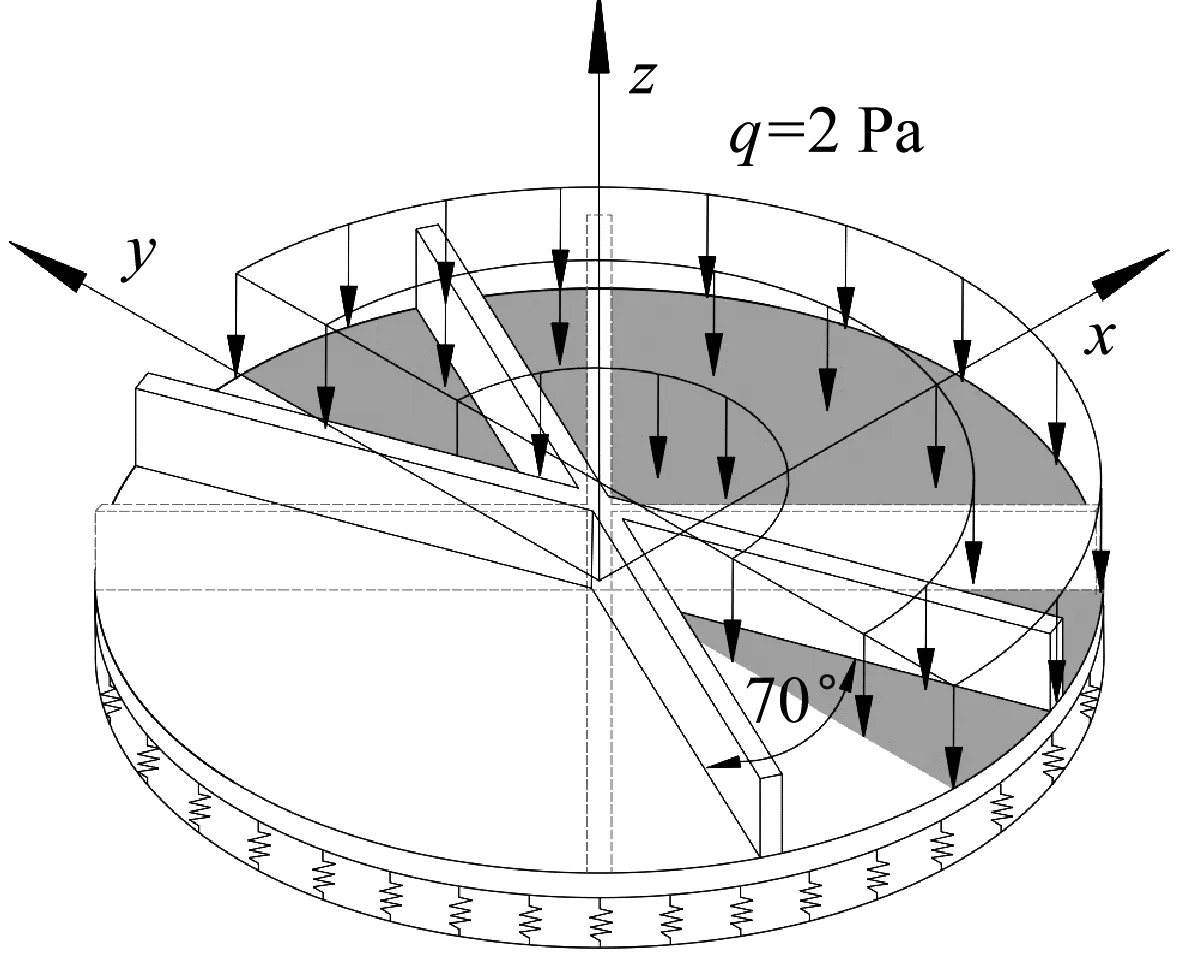
图24 肋条位置改变的弹性地基圆形加肋板

表10 肋条位置改变的弹性地基圆形加肋板的挠度
3 结 论
基于一阶剪切理论和移动最小二乘法,提出分析弹性地基上圆形加肋板弯曲的静力及自由振动问题的无网格法。文中以不同基床系数、边界条件、肋条布置形式的加肋板为例,将本文结果与有限元、文献结果对比,得出了以下结论:
(1) 本文方法收敛速度快,计算稳定性好。对于直径是0.5 m的弹性地基加肋板,在节点数达到169个时,结果收敛;影响域因子dmax大于3.0时,结果趋于稳定。
(2) 本文解与有限元、文献解吻合好,相对误差在工程允许范围内。在不同的基床系数、荷载、边界及肋条布置方式下,本文方法可有效分析弹性地基上圆形加肋板线性弯曲的静力和自由振动问题。
(3) 基于加肋板与肋条的离散点,通过两者在接触位置的位移协调建立了参数转换方程,点与点之间没有任何单元连接,当肋条位置改变时,肋条与板各自的离散点不会发生改变。因此,本文方法可以实现肋条在圆板上任意布置,而不需要网格重置,只需重新计算转换矩阵,非常适用于肋条优化工作的研究。
猜你喜欢
建材发展导向(2022年10期)2022-07-28
防爆电机(2022年1期)2022-02-16
昆钢科技(2021年6期)2021-03-09
铁道科学与工程学报(2020年1期)2020-02-13
中国海洋大学学报(自然科学版)(2019年11期)2019-10-12
建材发展导向(2019年11期)2019-08-24
郑州大学学报(理学版)(2019年1期)2019-02-19
广东第二课堂·小学(2017年9期)2017-09-28
儿童故事画报·发现号趣味百科(2016年7期)2017-02-08
小雪花·成长指南(2016年11期)2016-12-07
