
基于无人机遥感图像的森林火灾检测
2022-04-30 12:30杨海川茹志鹏张诗雨
宁夏大学学报(自然科学版) 2022年1期
杨海川, 茹志鹏, 张诗雨
(1.九天智能科技(宁夏)有限公司大数据中心,宁夏 石嘴山 753000; 2.宁夏工商职业技术学院,宁夏 银川 750021)
森林对自然生态有重要意义,可以保持水土、调节气候,为野生动植物提供栖息地.同时,森林也为人类提供大量的动植物生态资源[1].但是,由于森林火灾的发生,大量自然森林区被破坏,造成严重的生态与经济损失.而森林火灾的发生具有偶然性、突发性等特点,为了保护动植物的生态环境,减少森林火灾造成的损失,节约自然生态保护的人力与经济成本,需要对大型森林地区进行实时监测.由于火灾发生时蔓延性强难以控制,对森林火灾进行及时、准确的检测便成为目前国内外研究的重要方向[2].
森林区多是人烟稀少的地区,一般传感器检测设备在森林地区难以部署. 目前,森林火灾检测多采用遥感图像作为判别依据进行火灾识别[3—5],并用无人机搭载摄像头进行实时拍摄监测,基于无人机的遥感视频拍摄被广泛应用于森林监测领域[6—7].同时,随着计算机技术及图像处理技术的发展,基于视觉的遥感技术已经被广泛应用于火灾检测系统.
目前,国内外对火焰和火灾的检测方法多为基于图像处理技术[8—9]及深度学习理论的目标识别方法[10—12].基于图像处理技术的检测方法是对火焰图像进行分析,提取火焰特征.由于森林背景与火焰差异明显,该方法算法简单,对火焰特征提取准确,但对烟雾以及云的特征区分效果较差.然而,该方法实时性较好,目前可以广泛应用.而基于深度学习理论的检测方法,直接利用火焰图像进行标定学习检测,可以提取形态复杂的火焰特征,并对烟雾检测有一定的效果,准确率较高.但该方法算法复杂,需要大量标定图片,目前难以在移动平台中应用.
针对森林火灾检测的研究现状,兼顾识别的准确率与时效性,并基于无人机无人监测平台开发的森林火灾检测系统,本文考虑利用遥感图像结合图像处理技术与机器学习理论进行森林火灾检测.
1 遥感图像预处理方法
1.1 遥感图像分析
由于森林多位于人烟稀少地区,根据应用场景,本文利用无人机平台拍摄的遥感图像进行火灾识别.首先对识别的火灾目标进行图像预处理,提取火灾检测中的感兴趣区域(ROI).图1为利用无人机采集到的部分森林遥感图像.

图1 森林遥感图像
在森林环境中,自然背景包括森林、岩石、土壤、天空与云,识别目标为火焰与烟雾.由于火灾与森林的背景差异明显,对火焰的检测较为简单,但在火灾发生前期,森林中仅有烟雾未出现明火,此时对烟雾的检测就显得更为重要.
一张森林遥感图像中会包含多类目标,本文基于目标分类截取包含目标类别的原始图像,将RGB图像进行图像分割,分别提取森林、岩石、云、烟雾以及火焰的RGB图像,并进行人工标定,结果见图2.

图2 目标RGB像素提取
图2中R、G、B分别代表RGB像素分量.散点分布越接近坐标轴,当前像素点的像素值越接近坐标轴所代表的颜色,像素点距离坐标轴原点越远其亮度越高.利用标定图像进行标定,由图2可以看出不同目标的像素向量分布存在一定的差异:森林、岩石、火焰目标的亮度整体偏低,当R轴向量值相同时森林目标的G分量较高,火焰目标的R分量最高,岩石目标的亮度位于森林目标与火焰目标之间,而云目标整体亮度较高且其G分量相对较高,烟雾目标多分布于坐标轴的主对角线上,代表亮度以黑白为主,与实际相符,且烟雾目标与云目标的RGB分量重合度较高.通过选取不同视角可得图3.

图3 目标RGB像素聚类
图3是由图2经视角变换得到的.由图3可以看出,5个类别在像素空间距离上有明显的聚类关系,可以根据各目标在像素空间中的位置关系,利用无人机系统采集的监控图像可以作为火灾目标识别的判断依据.考虑根据机器学习方法对带标签的像素点进行分类判断.
1.2 基于SVM的图像预处理方法
首先,根据RGB 3个分量对图像像素点进行森林、岩石、云、烟雾、火焰分类.由图2可以看出像素分量之间存在明显的线性相关关系,但回归方法仅能体现像素组合之间的关系,无法体现像素点中的亮度差异.考虑利用支持向量机(SVM)机器学习方法对像素点进行分类.
首先,定义正样本(Positive sample)与负样本(Negative sample)的分割计算方法,即为待寻优的超平面分类函数:
1-yi(wTf(xi)+b)-ξi≤0,
(1)
式中:wT与b为分割平面参数;xi为像素点训练样本,包含R、G、B 3个特征向量;f(xi)为映射函数;yi为符号函数,作为判断正、负样本的条件;ξi为松弛参数,防止标定过程中偶然标定错误等人为因素导致的训练过拟合.
其次,定义训练目标优化函数:
(2)
式中:λi,μi为约束参数;w,b,ξi为正、负样本的分割平面参数.由于用于样本数据分类的超平面有无数个,在(2)式中引入间隔最大化作为训练目标,从而超平面参数的求解结果唯一.
对目标优化函数(2)中w,b,ξi分别求导取极值,化简得到目标分割平面参数约束条件:
(3)
(4)
λi+μi=1.
(5)
对于第i个训练样本,根据(1)式可得
(6)
(7)
以(2)式为目标函数,(3)~(7)式为约束条件,对参数wT、b进行寻优,得到最优分类超平面公式(1).
由(1)式可知经典的支持向量机为传统二分类器,本文在图像预处理中考虑了5类目标,不能满足本文提出的火灾检测方法的要求,为克服经典支持向量机的缺陷,本方法定义森林目标分类模块中共包含5(5-1)/2=10个SVM模型,每个分类器对当前像素点进行分类投票.当分类器对某像素进行分类时, 将像素点导入SVM模型中, 根据10个SVM模型的投票结果得出目标类别的预测.训练样本中,森林样本92 400个,岩石样本85 624个,云样本107 046个,烟雾样本89 676个,火焰样本29 547个.整体分类模块的输入是一个3维向量,输出为5维向量.
2 HOG-SVM火灾检测方法
在火灾检测中,利用方向梯度直方图(HOG)提取遥感图像中感兴趣区域的形态与纹理特征.利用机器学习方法基于形态特征,对火灾与非火灾遥感图像进行二分类.
根据遥感图像感兴趣区域,计算每个像素点的梯度强度和梯度方向,以梯度强度最大的像素点对应的梯度方向为当前像素的梯度方向.梯度方向和梯度强度的计算公式为
(8)
G(x,y)=
(9)
式中:I为遥感图像对应的像素点;x,y为像素点坐标;g为红外温度图像的Gamma系数.由于遥感图像拍摄时间及角度不同,为减少光度对火灾检测的影响,将遥感图像映射到标准化Gamma空间.
计算遥感森林检测图像中所有像素点的梯度方向与梯度强度,构建细胞单元(cell)的方向梯度直方图.将0°~180°平均分为8组,以22.5°为一个梯度方向集,定义合梯度方向为一个梯度方向集中的整体方向,建立梯度方向直方图,将梯度方向量化为8个直方图通道(图4).

图4 HOG方向块
基于8个直方图通道对细胞单元中各像素点的梯度强度进行投影;依次以投影量为权值,叠加到8个梯度方向代表的直方图上,定义相邻2×2个细胞单元为块(block),通过滑动归一化消除目标与远景的光照强度差异影响.
在本文提出的基于HOG-SVM的火灾检测方法中,将8个合梯度方向作为方向梯度直方图的统计量,将感兴趣区域的尺寸转化为256×256,选取细胞单元的尺寸为8×8,细胞块尺寸为2×2,一个元胞块包含4×8个特征,一帧遥感图像包含(256/8-1)2×(4×8)=307 52个维度的特征向量,以此为分类输入代入(1)式,将1 000张存在火灾的遥感图片与1 000张不存在火灾的遥感图片作为训练集,进行火灾与非火灾的目标二分类.
3 仿真实验
3.1 硬件平台系统
森林火灾检测系统包括无人机监测平台、北斗导航定位系统、地面站通信平台(图5).

图5 森林火灾检测系统平台
由图5可见,在森林火灾检测系统中,通过无人机搭载遥感摄像头采集森林火灾的遥感图像,利用北斗导航系统定位无人机,从而间接定位森林火灾.由于图像传输具有实时性且功耗过高,考虑在无人机平台中实现火灾识别. 为保证实时性,提高运算速度,对摄像头采集到的每帧遥感图像的感兴趣区域做整体火灾检测,且仅在检测到火灾时进行图像传输,并基于5G通信进行数据交互,将检测结果及火灾现场视频图像发送至地面终端.
3.2 火灾识别方法
在无人机硬件平台中嵌入基于遥感图像的森林火灾检测方法,整体识别流程包括图像预处理与森林火灾识别两部分(图6).
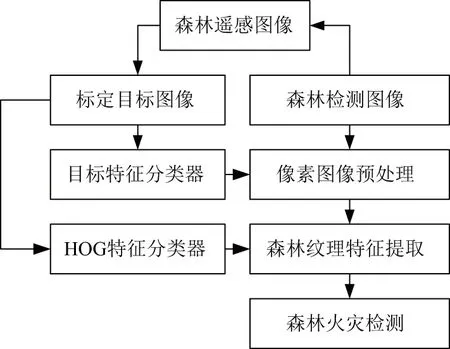
图6 森林火灾识别方法流程图
将森林遥感图像分为训练图像数据与测试图像数据,对训练图像数据根据森林、岩石、云、烟雾及火焰目标进行分类,训练目标特征分类器,用于图像预处理与感兴趣区域的提取.利用目标特征分类器对带标签的学习图像进行预处理,得到学习样本图片,提取HOG特征后利用HOG特征分类器进行学习,完成对森林火灾遥感图像的识别.整个方法中包含2个相互独立的特征分类器,分别用于遥感图像的预处理和火灾的识别.
分类结果见表1.由表1可以看出,分类器的分类准确率整体较高.存在一定偏差的原因为在森林环境中选取目标时,不存在一个像素块仅含有一个单一分类的目标,每个像素块中都含有部分其他分类目标,进行标定时不可避免地加入了噪声.由表1可知,由于像素点的RGB值相近,对烟雾和云的检测准确率较低,同样也验证了上文的结论.

表1 目标分类结果 %
火灾发生初期森林中未出现明火,根据表1的虚线框所示,云与烟雾的识别存在一定的偏差,若仅对烟雾进行检测,则准确率较低.考虑图像处理后利用烟雾与火灾的形态特征检测火灾.为提高遥感图像处理速度,对无人机采集的遥感图像进行预处理.根据图3,遥感图像中的每个像素点经过多分类支持向量机的识别后,都将得到一个分类结果.将相邻分类结果作为一个分类块,判断当前分类块中的主分类结果,将主分类结果作为该分类块的分类结果,利用分类块确定感兴趣区域,提取感兴趣区域进行火灾检测.图1中第2、第3张遥感图像的预处理结果及感兴趣区域的划分结果如图7所示.
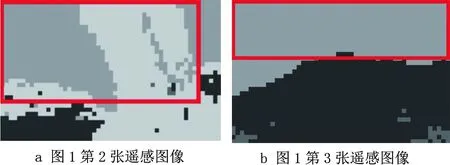
图7 感兴趣区域提取
利用图像预处理提取感兴趣区域,将遥感图片的感兴趣区域缩至256×256,统计方向梯度,计算每个细胞单元模的梯度直方图.梯度特征提取结果见图8.
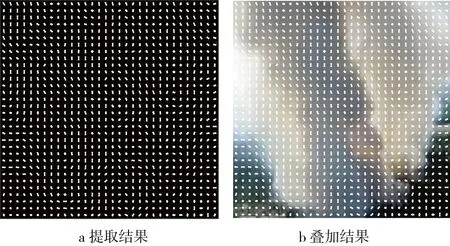
图8 HOG特征提取
利用HOG特征表示火灾遥感图像的纹理特征.HOG可以准确提取遥感图像的纹理特征,适用于对火灾以及烟雾的检测.由图8可以看出烟雾的方向梯度以纵向为主,背景干扰的方向梯度无明显指向.将遥感图像中所有细胞单元的方向梯度直方图作为输入x代入(1)式,利用支持向量机进行训练.以100张火灾遥感图片与100张非火灾遥感图片为测试集进行测试. 将引入遥感图像预处理方法前后的火灾检测结果进行对比,计算公式为
(10)

图9a、图9b中上、下两组概率分别表示火灾遥感图像的识别正确率、错误率及非火灾遥感图像的识别错误率、正确率.本文检测方法的准确率较高(平均为93.5%),具有一定的可行性.
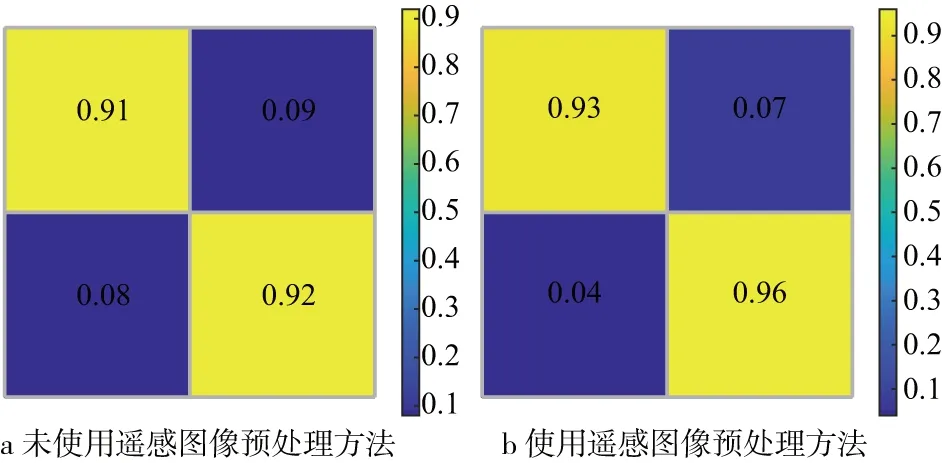
图9 森林火灾识别结果
4 结论
本文提出了一种基于遥感图像的森林火灾检测方法,其识别过程包括基于遥感图像像素点的目标分类和火灾目标识别.利用图像预处理技术对森林火灾的背景、烟雾、火灾进行区分,提取遥感图像的感兴趣区域,并对感兴趣区域进行基于边缘与纹理特征的火灾目标识别.仿真实验结果表明,对火灾遥感图像进行感兴趣区域提取及预处理后火灾识别效果更好,验证了该方法的可行性.将火灾识别方法嵌入硬件平台,搭建基于遥感图像的检测系统可实现对森林火灾的精准监测.
猜你喜欢
农业工程学报(2022年6期)2022-06-27
健康体检与管理(2022年4期)2022-05-13
化工进展(2022年3期)2022-04-12
小学阅读指南·低年级版(2021年3期)2021-03-19
建材发展导向(2021年23期)2021-03-08
华人时刊(2019年13期)2019-11-26
现代电子技术(2018年18期)2018-09-12
软件导刊(2018年4期)2018-05-15
电脑知识与技术(2018年35期)2018-02-27
当代陕西(2017年12期)2018-01-19
