
无人机集群协同作战关键技术研究
2022-04-29 19:05马立黄河
计算机应用文摘 2022年15期
关键词:关键技术
马立 黄河
摘要:文章通过分析单平台无人机作战的不足,引申出无人机集群协同作战的概念,介绍了无人机集群协同作战的优点和面临的挑战,并阐述了无人机集群协同作战的相关关键技术,旨在为无人机集群的未来发展提供帮助。
关键词:无人机集群;关键技术;协同决策;战术数据链
中图法分类号:E926文献标识码:A
Research on key technologies of UAV swarm cooperative combat
MA Li,HUANG He
(The 20th Research Institute of China Electronics Technology Group Corporation, Xi'an 710000,China)
Abstract:By analyzing the shortcomings of single-platform UAV operations, the article extends the concept of UAV swarm cooperative operations, introduces the advantages and challenges of UAV swarm cooperative operations, and expounds the key points of UAV swarm cooperative operations, so as to promote the future development of drone swarms.
Key words: UAV colony, key technology, synergy decision,tactical data link
自21世纪以来,无人机在军事战争领域发挥着举足轻重的作用,因为它满足现代化战争所需要的高射程、高精度、零伤亡、高重复利用率以及隐蔽性等需求。部分西方国家已经正式把无人机的发展列入网络中心战系统框架中,基于此框架,研发了许多关键技术(如精确定位和信息融合等技术)。但是,单平台无人机有限的飞行能力和载弹负荷很难独自完成复杂战场态势中的信息收集、区域监视、多目标攻击等任务(包括空面目标打击、压制敌防空系统任务等)。因此,研究者提出了无人机集群的概念,其借鉴自然界的自组织机制,与蚁群和蜂群概念类似,让拥有一定智能化的多架无人机在没有一切指挥控制的情况下,通过相互间信息通信融合产生整体效应,实现较高程度的自主协作,从而在尽量少的人员干预下完成预期任务,最终实现“1+1>2”的作战效果。无人机集群协同作战有很多优点,但同时也面临诸多挑战[1~2]。
本文首先介绍无人机集群协同作战的优点和面临的挑战,然后重点讨论了无人机集群协同作战中的关键技术问题,最后的对未来的发展及应用作出展望。
1优点和挑战
1.1特征
无人机集群是一个典型的群智能系统,也是一个复杂非线性决策控制系统,可以很好的适应高动态环境并执行相对复杂的作战任务。对于执行作战任务的无人机集群,必须保证此系统具备高效的协同策略,否则会导致无人机之间发生响应冲突、碰撞等情况。为了确保无人机集群高效协同地执行作战任务,整个系统需要根据战场环境信息(天气地形和电磁环境)、无人机的特征(任务载荷性能、机动能力、隐身特性等)和任务需求(任务数量、任务类别和任务优先级等),为各无人机制定任务计划,并通过无人机之间的协同提升整体作战效能。因此,需要满足的特征如下。
信息交互:集群内各个平台之间要通过通信链路(战术数据链)来共享信息,从而保障实时传输消息(包括地形、气候、目标信息等)的有效性。
自适应协同:集群内的各个平台可根据共享的位置信息相互感知,并自主协同伴飞,在保证互相不碰撞的前提下,可以按要求和命令步调一致,从而形成有利阵型,进而更好地发挥战斗力。
高動态、高智能:面对日益复杂的战场环境,要利用集群庞大的数据融合处理能力,打造成一张“网”,从而形成一个庞大的系统,使整个系统更快、更有效地运转,作战时可以自主判断,自动下达作战命令,自主选择何时、何种方式进攻,不再依赖人的干预,做到“1+1>2”。
1.2优点
无人机集群协同作战是以编队形式按照特定的规则组合而成,它可以处理各种复杂问题,提高任务完成的效率和成功率,而且比单架无人机生存力强、冗余度高、信息传递更迅速。其拥有的优点包括:并行执行任务,提高任务执行率;通过任务重分配,提升系统对环境的适应能力;各无人机平台可协同配合,以保证任务完成质量;无人机集群共享信息与资源,以提高任务执行能力。
1.3挑战
如今的战场环境复杂多变,平台和节点数不胜数,无人机需要和其他作战实体或战场要素相互关联、制约和影响,这使得无人机集群协同决策控制变得十分困难,同时无人机之间需要高动态、高可靠性、低时延、高带宽的通信链路,保证机间的实时通信和态势共享。此外,无人机集群必须有完整的动态航路规划算法,使得集群间有效的协同探索并避免碰撞。相关技术包括:复杂环境下的协同决策技术,是一个多参数、多约束的非确定多项式问题;高动态、高可靠性、低时延、高带宽的战术数据链;智能飞行控制技术,在无人干预的情况下进行有效协同探测
2关键技术
针对面临的挑战,衍生出许多无人机集群协同作战的关键技术,本文主要介绍无人机集群组网的战术数据链、自组织飞行与控制、环境与态势的资源共享、协同决策等技术。
2.1战术数据链技术
数据链是一个信息处理、交换和分发系统,是现代战场中及时有效地处理和掌握高密集、高速变化的战场态势并完成多机间相互传送信息的网络装置,是传感器的一部分。近年来,世界上的军事大国、强国和部分军队正在装备和使用的“战术数字情报链”“多功能信息分配系统”“高速计算机数字无线高频/超高频通信战术数据系统”“联合战术信息分发系统”等属于数据链。
与民用网络通信不同,战术数据链主要传输实时化、格式化战术数据,对所获取信息的实时性、可靠性和保密性等方面要求甚高。因此,在设计开发战术数据链的过程中,需要设计并验证可靠的报文格式,选择合适的编码、调制方案,确定安全快速的接入控制技术。同时,要研究开发数据链的抗干扰能力、导航能力、中继能力等,为战术数据链的设计开发提供决策支持。
无人机集群满足作战的最基本要求就是有自己的通信方式,这就需要一款为无人机集群量身定制的战术数据链系统。有了战术数据链的加持,协同决策、自主编队飞行与控制、集群的环境感知与态势共享才能同时进行。虽然现有的数据链实时性很强、传输容量大、可靠性高、时空统一,但作战前都需要一套规划,俗话说无规矩不成方圆,这样限制了无人机集群的自主程度。未来战场的无人机,节点数会非常多,同时会不定时地加入或退出网络,这就需要一款高动态、高可靠性、低时延、高带宽、智能化的战术数据链系统,使得无人机集群的内部环境和外部环境发生改变时,可以自主分发自己所承担的角色,从而进行高效作战。
战术数据链的开发工作相当烦琐,经过几十年的积累,我国在这方面的技术已日渐成熟,对于高动态的网络运维管理,也已经着手研究,相信在不久的将来,无人机集群会有属于自己的战术数据链系统。
2.2自组织飞行与控制技术
无人机集群协同作战的必要条件就是拥有自组织飞行能力。首先,要实现多无人机编队的自主控制,即在没有人干预的情况下,多无人机可以根据程序的设定自主飞行。其次,多无人机的动态航路规划问题,即既要满足多无人机的环境规避和碰撞,又要保证无人机的飞行路线在最优的路径上。自组织控制是指无人机集群在复杂战场环境下执行任务过程中,在满足各平台性能的基础上,需要按照一定的排列和相对复杂的编队形式不断变换队形,从而适应整个战场环境、战术任务等要求。自组织飞行与控制要求无人机的自主程度高,需要操作员或者辅助系统管理与控制的事情较少,这需要更高级别的智能系统的支持。而环境规避是提高无人机集群生存的必要条件。它不仅要感知外部环境带来的威胁,还要规避集群内部其他无人机轨迹和时空上的重叠,从而避免碰撞,实现协同飞行。例如,美国已经将民航飞行系统中的空中告警与防撞系统引入无人机集群[3]。
我国通过控制其中一架长机或多架长机实现了无人机集群的空中表演,但是空中表演中无人机飞行控制的自主程度远远不够应对复杂战场环境下的作战需求,因此我们要借助人工智能领域与机器学习的相关技术进行深度学习,研究更高自主程度的飞行控制算法。
2.3环境与态势的资源共享技术
无人机集群需要适应在不确定环境下执行各种复杂任务,这就要求无人机集群能够对战场环境进行全方位扫描,以形成环境感知,然后在集群中进行资源共享与交互,让集群中的所有无人机处于同一态势环境,以便进行任务决策,这是无人机集群实现高级别自主控制的基础,也是无人机集群控制与决策的依据。利用无人机集群中多传感器收集飞机所处环境信息数据,进行态势感知,并通过战术数据链进行态势共享,形成统一的作战视图,从战场的环境数据中进行数据挖掘、分析,获取目标信息,然后利用多传感器的融合技术对目标进行识别探测,从而引导攻击,进一步提高作战任务的可靠性和生存性。环境与态势的资源共享的关键技术包括多传感器数据融合、协同目标探测与共享等,现有的协同技术局限性很强,节点数量无法满足无人机集群的要求,算法的效率并不能给无人机集群提供有效可靠的支持。目前,国内外相关领域专家正通过基于生物视觉认知机理的目标识别与环境建模、复杂环境感知与认识算法、非结构化感知方法等手段,实现能够适应无人机集群的环境感知与态势共享技术。
2.4协同决策技术
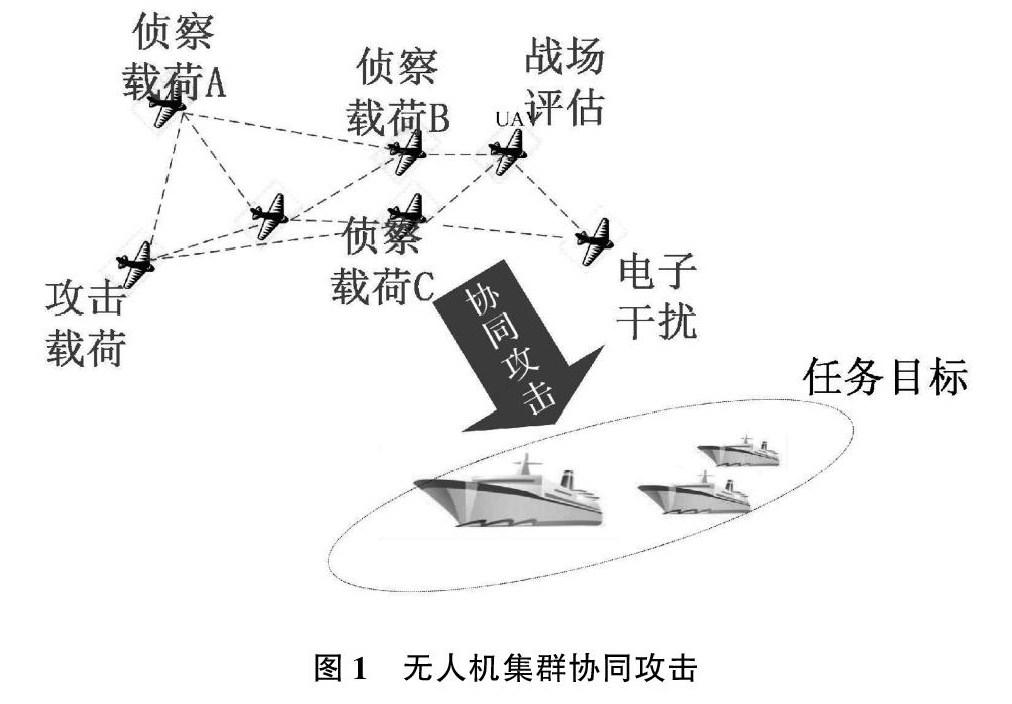
无人机集群系统在作战中需要一套自己的流程,即情报收集、战场环境侦查、目标探测识别监视、威胁评估、目标分配、协同攻击、毁伤评估等,而合理高效地完成这些流程就需要任务规划,而任务规划就是协同决策的基础。合理的任务规划可以充分利用单机平台的优势,进一步发挥集群资源的高智能化,从而保证任务执行的成功率和效率,这可以低风险、低成本地完成作战任务。无人机集群的协同决策一般按照任务均衡的原则进行,综合考虑任务空间聚集性、单机运动有序性以及目标环境适应性,避免单机资源利用冲突,以集群编队整体最优效率完成最大任务数量,体现集群协同作战优势(图1)。协同决策的关键技术在于其自主任务分配算法的研究,现有的蚁群算法、粒子群算法、遗传算法、一致性算法等都不适用于大规模的复杂任务自主规划。对于无人机集群系统的任務分配算法,可以考虑多种算法相结合,取其精华去其糟粕,并加入强化学习的理念,建立模型,寻求最优解。
3想定
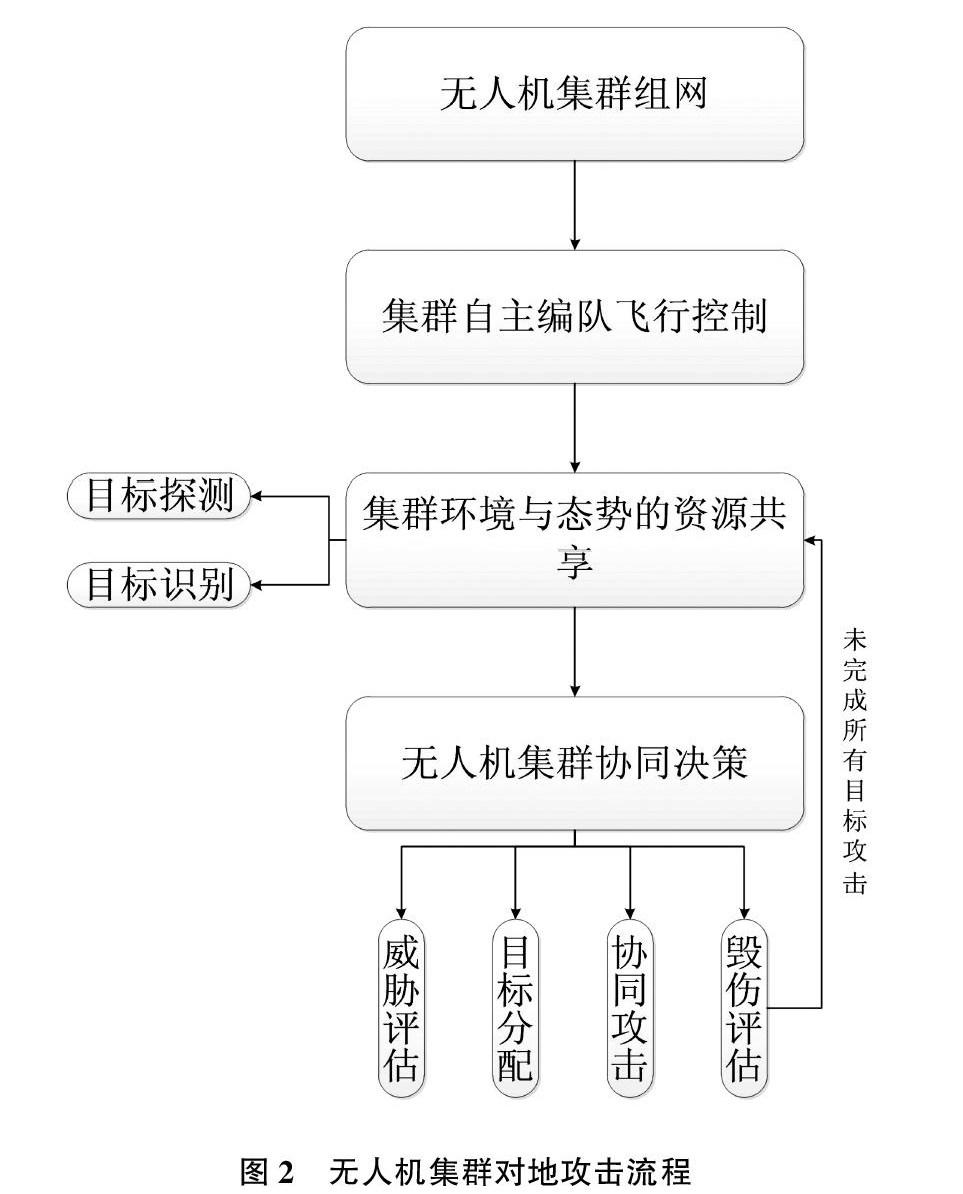
在研发了无人机集群协同作战的关键技术之后,我们给出一种无人机集群对地攻击的大致流程,如图2所示。
首先,通过战术数据链对无人机集群进行组网,分配好各自目前扮演的角色。其次,无人机集群通过作战规划进行自主编队飞行,合理避开碰撞,并对战场的环境进行扫描和感知,并将获取的态势共享给整个无人机集群,充分利用机载多传感器获取的数据进行数据融合,不断探测目标、识别目标,最后将目标信息传递给后台,得到统一态势。后台获取数据后,进行协同决策的算法计算,包括各个目标的威胁评估和各个己方平台的状态位置等信息,从而进行多目标分配决策,并约束攻击顺序。当对目标进行攻击后,需要对战场进行清扫,对目标的毁伤作出评估,如未完成目标攻击,需要重新感知战场环境,并进行第二轮攻击。
通过此流程可以清晰直观地看到无人机集群协同作战的诸多优势,首先,它不需要借助人力便可以处理各种复杂问题,提高任务完成的效率和成功率。而且,相对于有人参与的战场,伤亡会大幅减小,任何人都不能接受人员的伤亡,但只是损失个别无人机,则战损比就可以忽略不计。战争是残酷的,如果采用无人机集群协同作战,不仅可以更快结束战斗,而且不会有大量的人无家可归。
4结语
无人机集群技术作为一种前沿的高智能、高动态群体技术,具有很强的环境适应性、协同作战能力、高智能化等优势,受到世界各军事强国的青睐,目前的技术尚不完善,处于快速发展和研究阶段,随着应用不断推广、技术不断成熟,无人机集群系统必然会在今后的战场中发挥着举足轻重的作用,甚至完全取代有人机,从而使战场无人化。
参考文献:
[1]李晗,苏京昭,闫咏.智能无人机集群技术概述[J].科技视界,2017(26):5?7.
[2]段海滨,申燕凯,赵彦杰,等.2019年无人机热点回眸[J].科技导报,2020,38(1):170?187.
[3]牛轶峰,肖湘江,柯冠岩.无人机集群作战概念及关键技术分析[J].国防科技,2013,34(5):37?43.
作者简介:
马立(1990—),硕士,中级工程师,研究方向:软件与数据处理。
猜你喜欢
今日畜牧兽医(2022年10期)2022-12-23
今日农业(2021年8期)2021-11-28
今日农业(2021年13期)2021-11-26
现代畜牧科技(2021年3期)2021-07-21
落叶果树(2021年6期)2021-02-12
铁道通信信号(2018年7期)2018-08-29
现代园艺(2017年23期)2018-01-18
电信科学(2016年11期)2016-11-23
电信科学(2016年9期)2016-06-15
铁道通信信号(2016年1期)2016-06-01
