
储能改进型Y源光伏逆变器的滑模控制策略
2022-04-26 09:15孟令鹏希望阿不都瓦依提吕海鹏石存金
电源技术 2022年4期
孟令鹏,希望·阿不都瓦依提,吕海鹏,石存金
(新疆大学电气工程学院,新疆乌鲁木齐 830047)
随着“碳达峰、碳中和”目标的提出,我国能源的消费结构将发生深刻变化,各类清洁能源将得到大力发展,而太阳能作为一种清洁、高效、易获取的能源得到人们的广泛青睐。光伏逆变器是光伏发电系统中的关键部分,传统光伏逆变器普遍采用两级式拓扑结构,存在成本高,效率低等问题[1]。为解决上述问题,彭方正团队提出了Z 源逆变器(Z-source inverter,ZSI),在单级变换器中实现升降压和逆变功能,且不受直通的影响,提高了系统的可靠性[2],被广泛应用于光伏系统中。然而,ZSI 存在电流不连续、升压比较低、元器件应力较大等不足,相关学者又提出了qZSI、Trans-ZSI、Γ-ZSI 等改进型阻抗源逆变器[3-6]。其中,改进型Y 源逆变器(improved Ysource inverter,IYSI)升压比高,电流连续,同时具有灵活的绕组匹配度,可以获得不同的升压比,是近年来的研究热点[7]。
由于光伏系统固有的间歇性和随机性,使输出功率呈现波动性,并限制光伏系统的适用性[8],因此,通常在光伏发电侧增加储能系统,以此来降低系统的波动性和存储多余能量。而大部分储能系统采用双向DC/DC 变换器来控制蓄电池的充放电,增加了系统的复杂度和控制难度,降低了系统效率。鉴于此,文献[9]提出储能型准Z 源逆变器(energystored quasi-Z-source inverter,ES-qZSI),将蓄电池组直接并联在Z 源网络的一个电容上,实现对蓄电池的充放电控制,而无需任何额外的DC-DC 电路,因此该拓扑具有结构简洁,成本低的特点[10]。然而,传统的ES-qZSI 系统存在升压比低的问题,且对前级光伏板和蓄电池电压有较高的需求。为解决上述问题,文献[11]将蓄电池并联在IYSI 的电容C1上,可以提高电压增益,降低对蓄电池和光伏板的电压要求,同时通过控制直通占空比D和调制比M两个控制自由度就可以实现光伏MPPT、蓄电池组充放电以及交流侧输出功率。然而,ES-IYSI 是一个五阶非线性系统,其传递函数具有非最小相位零点,且无法通过调整电路的参数加以消除,当输入电压发生扰动的时候,这个不稳定零点会造成直流侧电压的超调和振荡,这增加了控制器的设计难度。
目前,针对IYSI/ES-IYSI 的控制策略普遍采用电压外环、电流内环的双环PI 控制方法,但PI 控制参数调整困难,同时应用于非线性系统时控制效果不佳。因此,针对IYSI 这类非线性阻抗网络逆变器,有文献提出了一些非线性控制方法。文献[12]将模糊控制应用于ES-qZSI,提高了电网电流质量,降低了电池充放电脉动,但模糊控制器的设计缺乏系统性,参数选择过于依赖经验。文献[13]将能量成型控制方法(PHC)应用到IYSI 中,简化了控制器的设计,使控制速度更快,但并没有研究参数变化对输出电压和全局稳定性的影响。在精细化建模方面,文献[14]为降低ES-qZSI 系统的二倍频波动,建立了详细的数学模型,提出了系统参数的相关设计方法。文献[15]用小信号模型法推导出qZSI 的传递函数,基于传递函数设计了直通控制器。然而,到目前为止,针对ES-IYSI 的详细建模及SMC 的研究,相关文献、成果较少,研究亟待深入。
本文采用滑模控制方法对ES-IYSI 的直流侧和交流侧分别控制,首先分析了ES-IYSI 工作原理及工作模式,然后用状态空间法推导了系统的数学模型,同时用小信号模型进行暂态分析,在此基础上给出了滑模控制的设计方法和步骤。最后通过仿真验证了双滑模控制的有效性。
1 ES-IYSI 系统结构与数学模型
单相ES-IYSI 系统结构如图1 所示。它由改进型Y 源网络、电池模组和逆变器组成。改进型Y 源网络包括三绕组耦合电感、两个电感L和Lb、两个电容C1和C2和一个二极管D。电池模组可以简化为开路电压VSOC和内阻Rb的等效模型。
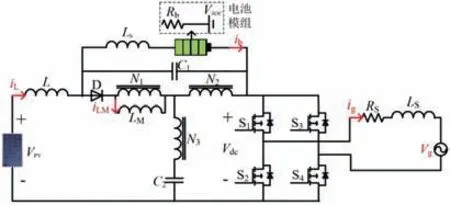
图1 单相ES-IYSI系统的结构
1.1 功率流动
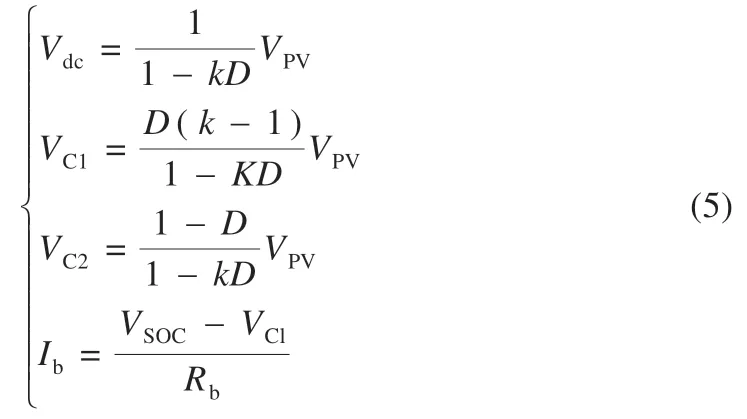
如图1 所示,ES-IYSI 需要控制三端功率:光伏板输入MPPT、蓄电池储能SOC以及输出功率。通过控制两个功率流,第三个功率流自动补足功率差,如式(1)所示[16]:

式中:PPV为光伏功率,始终为正;PB为电池功率,吸收功率时为负,释放功率时为正;Pout为逆变器输出功率,始终为正。
从式(1)可以看出,控制三种功率流的方式有三种:(1)控制光伏板的输出和并网功率,蓄电池的充放电功率可以根据式(1)自动匹配;(2)控制并网和蓄电池功率,光伏功率可以根据式(1)自动匹配;(3)控制光伏板的输出和蓄电池的充放电功率,并网功率可以根据式(1)自动匹配。本文采用第一种控制方法。
1.2 ES-IYSI系统建模
ES-IYSI 与ZSI 类似,有两种变换状态:任意支路上的上下两个开关器件同时导通时,即可进入直通状态如图2(a)所示,二极管D 反向截止,逆变器输出功率为零;图2(b)为非直通状态,逆变器向电网输送功率,二极管D 导通。
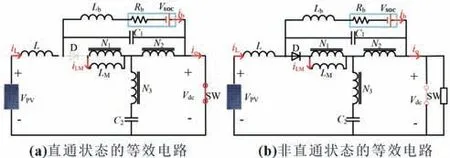
图2 单相ES-IYSI系统的工作模式
由图2(a)可得系统直通状态下的状态空间方程:
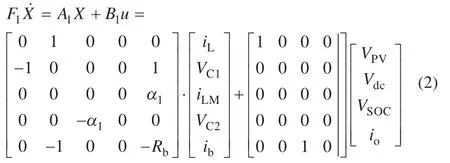
式中:α1=N1/(N2-N3);F=diag(L,C1,LM,C2,Lb);X=[iL,VC1,iLM,VC2,ib]T;u=[VPV,Vdc,VSOC,io]T。
由图2(b)可得系统非直通状态下的状态空间方程:

式中:α2=N1/(N1+N2);α3=(N1+N3)/(N1+N2);α4=(N3-N2)/(N2+N3)。
考虑电力电子变换器动态建模中的状态空间平均技术,在开关频率足够高的情况下,可将式(2)和式(3)结合起来,得到系统的平均状态方程为:
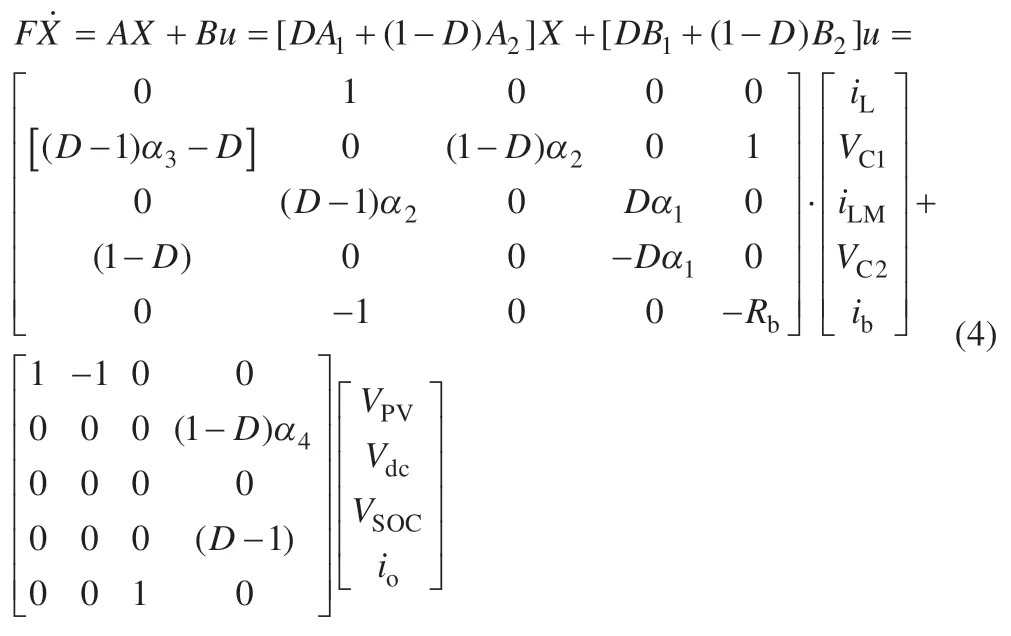
式中:D为直通占空比,它是一个周期内系统直通状态时间与开关周期的比值。
式中:k=1+[(1+N12)/(1-N32)]。


式中:k1=(α3-1)iL-α2iLM-α4io;k2=α2VC1+α1VC2;k3=-iL-α1iLM+io。
对式(7)进行拉普拉斯变换可以得:
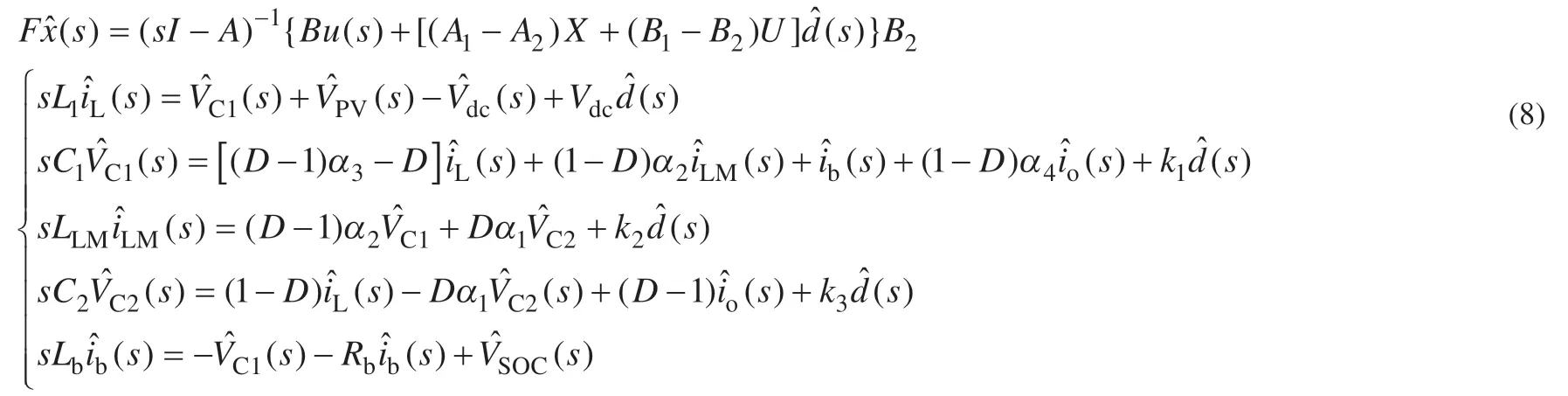
根据式(8),运用梅逊增益公式可以计算ES-IYSI 直通占空比到电池电流的开环小信号传递函数如式(9)所示:

式中:k4=[(D-1)α3-D];k5=(1-D)α2;k6=Dα1(1-D)。
根据式(9)可知该系统存在右半平面零点,这会导致系统的振荡和非最小相位响应。
2 ES-IYSI 滑模控制器设计
2.1 直流侧滑模控制
考虑直流电容电压的非最小相位特性,直接控制占空比来控制电容电压容易造成响应滞后,性能达不到要求,因此采用电流间接控制的方式,为设计直流侧SMC,系统的状态变量误差可定义为:

该控制器的滑模面为以上状态变量的线性组合,表示为:

式中:β1、β2为滑模控制器增益。
当系统各变量运动到滑模面时,各变量都将追踪设定值,上述选取的滑模函数S=0,将式(14)对时间常数求导,并将式(12)和(13)代入式(14)可得:
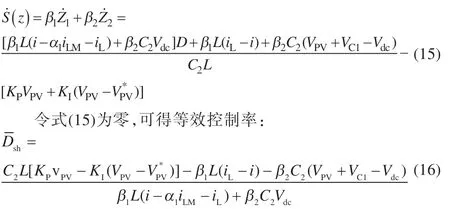
为了增强系统的鲁棒性,控制率被设为:

式中:Dsh是一个连续变量,通常介于0 到1 之间,但在ES-YSI中升压比为1/(1-KD),因此Dsh的值域为[0,1/K]。
2.1.1 存在条件
当运动到滑模面时,状态轨迹必须限制在滑模面上,并向零点移动,因此令系统的李雅普诺夫函数及其导数为:

为保证滑模运动的存在,必须满足局部可达条件,如式(19)所示:

将式(14)和(15)代入式(19),由此得到不等式(20):
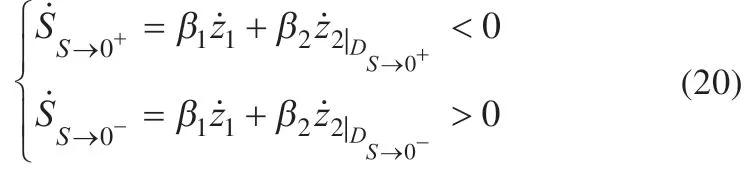
式(20)为ES-IYSI 系统滑模运动的存在条件,可将其分为以下两种情况:
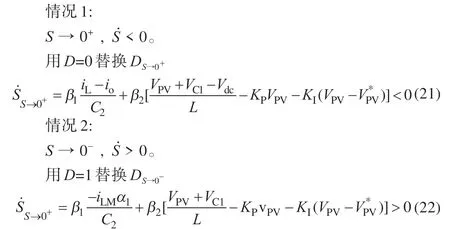
将储能改进型Y 源逆变器参数代入上述不等式进行验证,滑模控制的系数由以上不等式计算得出。
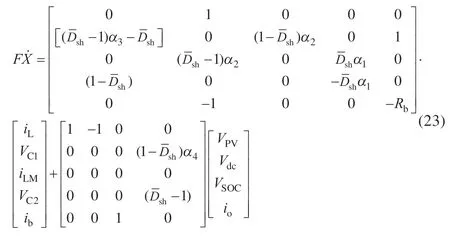
2.1.2 稳定性条件
用等效控制Dsh替代ES-IYSI 的大信号平均模型,将不连续系统转化为理想的滑模连续系统,如式(23):
2.2 交流侧滑模控制
为了控制ES-IYSI 输出的电能质量,必须控制逆变器的输出交流电流,本文设计了一套SMC 来控制交流侧的输出。
选取滑模面的函数为:

由图1 可知交流侧的状态方程为:

将式(25)代入式(24)可得:

选择趋近律公式为:

式中:K1、K2为滑模控制系数。
结合式(26)与(27),并令=0,解得等效控制率Ueq:

式中:Ueq实际是调制比M,用以控制并网电流。
详细控制策略如图3 所示,通过直流侧滑模控制得到调制信号Dsh,通过交流侧滑模控制得到调制信号M,调制信号M 和D 组合在一起产生控制逆变器的SPWM 信号,用来实现三端功率控制。
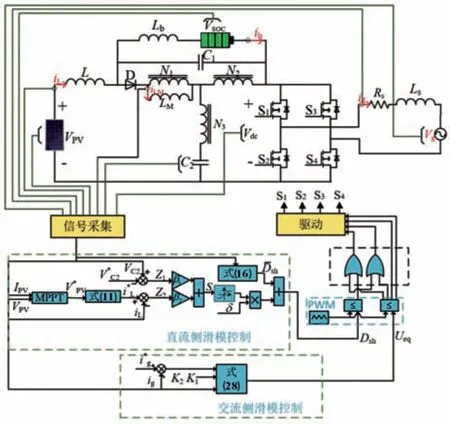
图3 滑模控制详细框图
3 仿真验证
为了验证双滑模控制策略的正确性,利用Simulink 仿真软件搭建系统的仿真模型。对图3 进行仿真分析研究,系统仿真参数见表1,仿真中光伏模块选用Kyocera KD135Gx,光伏板的数据见表2,采用8 串6 并组成一组光伏系统,储能电池为一个200 V/100 Ah 的锂电池系统。

表1 ES-IYSI 系统仿真参数
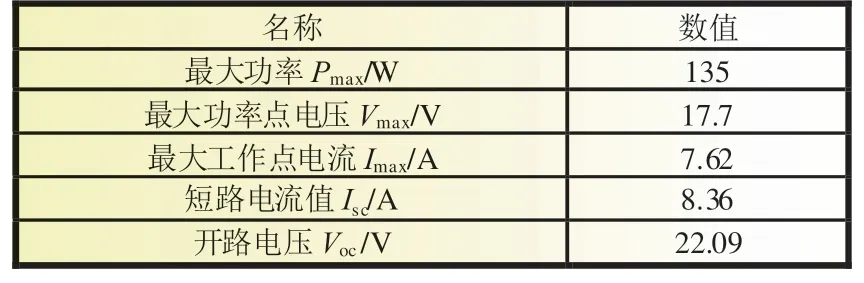
表2 光照1 000 W/m2,温度25 ℃时光伏板参数
3.1 光伏最大功率跟踪
图4 为仿真选用的光伏板P-V和I-V特性曲线,当太阳辐射发生变换的时候,曲线也不同,造成最大功率点的不同,为了保证光伏板的输出时刻处于最大功率点,本文采用扰动法跟踪最大功率点。
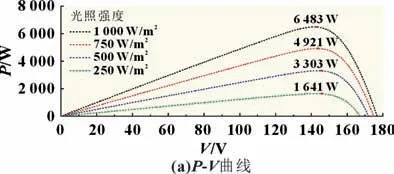
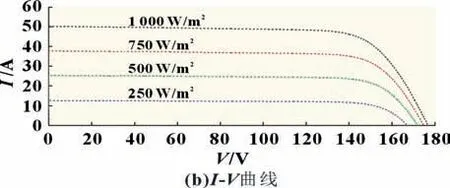
图4 温度25 ℃不同光照强度下的光伏板的P-V/I-V特性曲线
3.2 功率波动
蓄电池组可以在系统中起到削峰填谷的功能,图5 可验证该功能。图5 为ES-IYSI 在双SMC 控制下的工作波形。如图5(a)所示,开始时,光伏板输出功率大于交流侧输出功率,蓄电池开始充电;0.3 s 时光伏输出功率降低到4 000 W,交流侧输出功率维持4 000 W 不变,光伏板发出功率与交流侧功率相等,蓄电池组既不充电也不放电;0.5 s 时光照强度保持不变,交流侧输出功率上升到5 500 W,交流侧输出功率大于光伏板发出的功率,蓄电池组开始放电补足功率差额;图5(b)为蓄电池充放电情况,当光照强度或并网功率发生变化时,电池电流可以精准跟踪这种变化,补足功率差额;图5(c)为并网电流,当光照强度发生波动时,并网电流经过0.03 s 波动后迅速调整到稳态值,当输出功率增大时,并网电流随之增大,经过0.05 s 后趋于稳定。仿真验证了当功率波动时,ES-IYSI可以维持三端功率平衡,通过改变电池的充放电功率,进而保证并网功率的平稳。
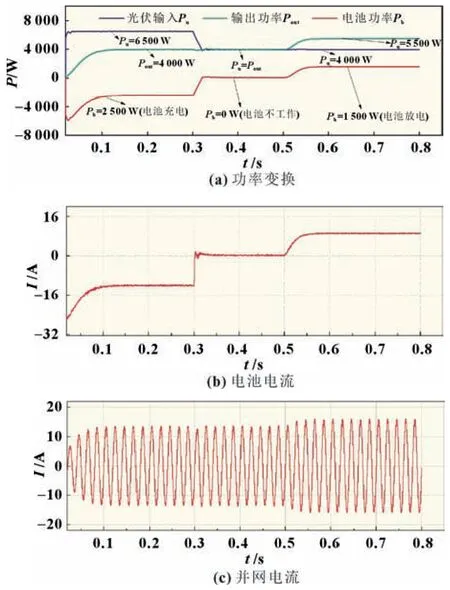
图5 ES-IYSI光伏输出和功率输出变换时波形
3.3 动态性能
图6 为光照强度突变时,采用PI 控制以及SMC 控制下的电池和并网电流波形图。由图6(a)、(b)可知,采用SMC 控制电池电流的响应速度快,超调量小,可快速补足功率差额,由此说明,SMC 的大信号性质在一定范围内具有更强的鲁棒性;图6(c)、(d)为两种控制方式下的并网电流波形,在本文方法下,并网电流的谐波含量(THD)为2.75%,传统PI 控制策略下,THD为4.22%,SMC 控制下并网电流动态响应速度及畸变率均优于PI 控制,提高了并网电能质量。

图6 光照强度突变时的动态波形
4 结论
本文采用滑模控制方法对ES-IYSI 系统的动态响应进行控制,首先对ES-IYSI 进行精细化建模,进而建立了系统的数学模型,然后设计了直流侧和交流侧的SMC,实现了对光伏输出、储能电池组和交流输出的三端功率控制,通过仿真验证了双滑模控制策略在ES-IYSI 系统的有效性。与双环PI 控制相比,本文所提策略提高了系统的稳定性,而且缩短了系统的稳态响应时间,降低了谐波含量。本文提出的控制策略可以简化控制器的设计,针对高阶非线性系统以及输入波动强的场景控制效果较好,具有一定的实用价值。
猜你喜欢
太阳能(2022年2期)2022-03-07
新能源汽车供能技术(2021年1期)2021-10-14
西藏艺术研究(2021年4期)2021-06-02
今日农业(2020年20期)2020-12-15
电子制作(2019年23期)2019-02-23
体育科技(2016年2期)2016-02-28
军民两用技术与产品(2016年3期)2016-01-05
汽车实用技术(2015年8期)2015-12-26
燕山大学学报(2015年4期)2015-12-25
创业家(2015年1期)2015-02-27
