
随机不平顺激励下地铁整体道床式轨道振动特性研究
2022-04-21 11:22靳伟江张思莹汶晓强石焕文
噪声与振动控制 2022年2期
靳伟江,张思莹,汶晓强,石焕文
(长安大学 理学院,西安710064)
地铁因其快速便捷、大运量、绿色低能耗等优点而受到欢迎,但其在带给人们便利的同时,也产生了环境振动问题[1]。对地铁轨道的振动特性及钢轨支座反力进行研究是城市轨道交通减振降噪和环境振动影响分析的前提。目前,研究车辆-轨道之间相互作用的方法已相当成熟,且在普通列车和高铁方面得到了大量应用,但在地铁方面的研究还有着很大的发展空间[2-6]。由于整体式道床轨道具有经济性好、施工方便、整体性好等优点,成为了地铁轨道的首选型式,而针对地铁整体式道床轨道振动特性的研究现在多是零散的,在系统性方面尚有欠缺。
对于地铁轨道振动特性的研究,现场实测是最可靠的,但往往由于受到经济原因和客观条件的限制,不能每次都进行现场实测,因此采用仿真模拟研究地铁的振动特性很有工程价值。基于此,本文针对地铁整体式轨道,在美国五级谱、美国六级谱、德国高干扰谱轨道不平顺激励下,通过二维数值分析法和三维有限元法对不同车速下的整体式道床轨道的振动响应进行了系统研究。其中,基于二维的车辆-轨道耦合动力学数值模型通过MATLAB编程实现,三维有限元模型通过ABAQUS 和SIMPACK 软件联合仿真实现。本文的创新点在于通过建立基于二维的车辆-轨道耦合动力学数值分析模型和三维有限元模型分别计算了不同车速、不同轨道不平顺激励下的整体道床式轨道钢轨的振动加速度、振动速度、垂向位移、钢轨支座反力、时域轮轨力等振动响应,系统分析了其振动特性和变化规律,并对两种模型的计算结果进行了对比。结果可为整体式道床轨道振动特性研究和地铁线路减振降噪设计及研究提供参考。
1 计算模型
1.1 基于二维的车辆-轨道耦合动力学数值分析模型
铺设地铁轨道时,在大多路段是将预制好的轨道板置于混凝土基础上,之后浇筑混凝土,使得轨道板和基础连结成为一个整体。这种轨道型式的轨下质量很大,轨道板和混凝土基础之间几乎没有弹性,简化后可以当作连续弹性离散点支承的单层梁考虑,如图1所示[7]。
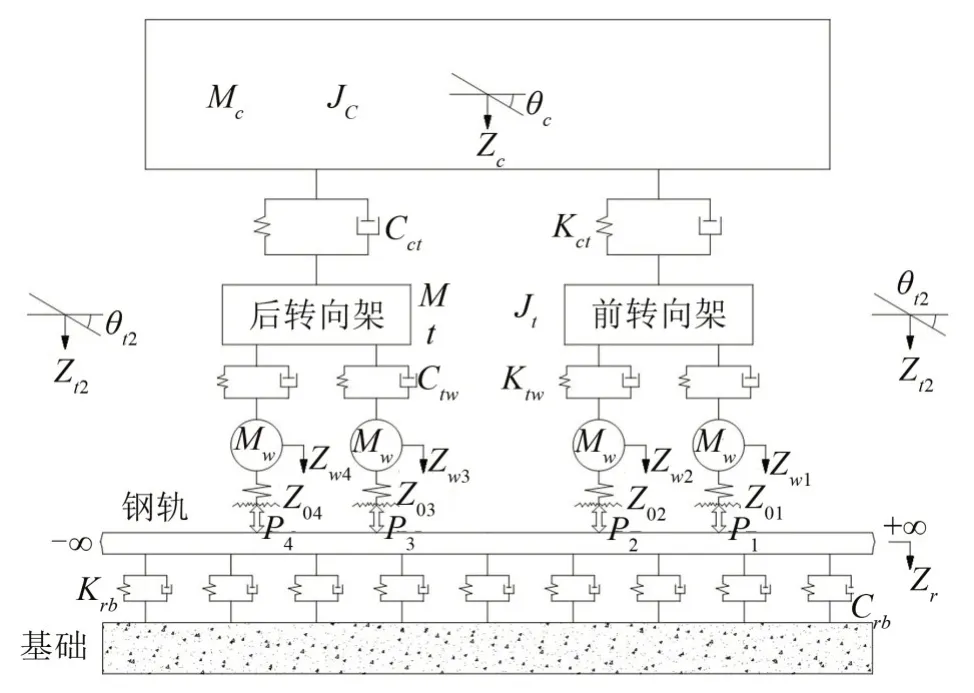
图1 列车-整体道床式轨道系统垂向振动模型
建立二维数值分析模型时,本文将整个车辆-轨道耦合大系统拆分为上部车辆结构和下部轨道结构两部分。上部车辆结构部件之间连接考虑为弹簧、阻尼元件连接;对于下部轨道结构采用连续弹性离散点支承上的无限长Timoshenko梁模型,扣件系统用离散分布的黏滞阻尼和线性弹簧表示[8]。上部车辆结构和下部系统结构之间通过几何相容条件和车辆-轨道之间相互作用力的平衡建立联系,在考虑几何相容条件时,可添加轨道不平顺激励[9]。确定车轮和钢轨之间的相互作用力时,采用Hertz非线性弹性接触模型。上部车辆结构和下部轨道结构的具体振动微分方程参见文献[3],可表示为如式(1)所示的统一形式。

式中:[M]、[C]、[K]表示上部车辆结构和下部轨道结构的质量、阻尼、刚度矩阵表示上部车辆系统和下部轨道系统的广义加速度矢量、广义速度矢量、广义位移矢量;{P}为上部车辆系统和下部轨道系统的广义载荷矢量。
根据Hertz非线性弹性理论,轮轨之间垂向作用力如式(2)所示。

式中:G为轮轨接触常数;δZ(t)为轮轨间的弹性压缩量(m)。
本文的车轮型式为磨耗型踏面车轮,G=3.86R-0.115×10-8,R是车轮半径。轮轨间的弹性压缩量包括车轮静压缩量在内,可由轮轨接触点处车轮和钢轨的位移确定,其表达式见(3)。

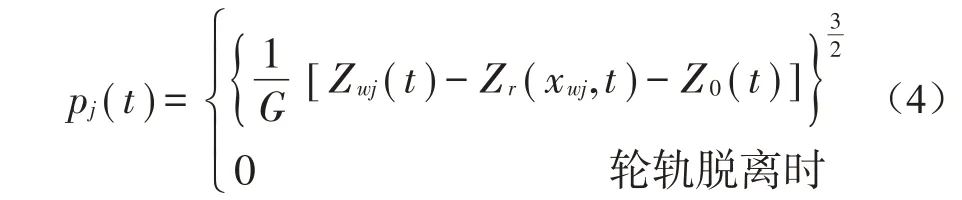
式中:Zwj(t)为t时刻第j位车轮的位移(m);Zr(xwj,t)为t时刻第j位车轮下钢轨的位移(m);当轮轨界面存在位移不平顺Z0(t)输入时,轮轨相互作用力的表达式如式(4)所示。
由于二维数值分析模型的系统自由度庞大,使用一般方法解算困难,故使用MATLAB 编程求解。采用无条件稳定的Newmerk-β法分别对上部车辆结构和下部轨道结构进行交叉迭代求解,计算时间步长取为0.000 2 s[4-5,7-9]。
1.2 三维有限元模型
三维有限元模型的建立通过ABAQUS 和SIMPACK联合仿真实现。在系统模型中,轨道部分是关注的重点,所以可将车辆系统视为多刚体系统,其弹性变形可以不予考虑,由于计算条件的限制,车辆的计算长度取为一节车厢。下部钢轨模型在ABAQUS中建立,在ABAQUS 中完成钢轨模态分析后,为提高模型在SIMPACK中的解算速度,用GuYan缩减法将钢轨的模态缩减到主节点处。钢轨三维有限元模型中,在钢轨顶端间隔0.3 m 设置一个主节点,在钢轨底端间隔0.6 m 设置一个主节点,钢轨长度取为27 m。进行SIMPACK和ABAQUS联合仿真时,先在ABAQUS中生成钢轨的*.fbi文件,之后在SIMPACK中用建立的*.ftr文件调用*.fbi文件,即可将ABAQUS中建立的柔性体轨道导入到SIMPCK 中。在SIMPACK 内置的对于轮轨接触作用的计算方法中,轮轨竖向接触力采用推荐的Hertz接触理论,计算时间步长取为0.005 s。SIMPACK中刚柔耦合动力学计算模型如图2所示。

图2 SIMPACK中的刚柔耦合动力学计算模型
1.3 轨道随机不平顺激扰模型
轮轨系统激扰是引起车辆-轨道耦合系统振动的根源,而轮轨系统中典型的非确定性激励当属轨道随机不平顺[3]。轨道随机不平顺通常采用功率谱密度函数表示,陈果等[10]构造了一种基于频域功率谱等效新算法,可以由频域中的轨道不平顺功率谱得到时域轨道不平顺。本文用到了3 种轨道不平顺,分别是美国五级谱、美国六级谱、德国高干扰谱。美国五级谱、六级谱轨道高低不平顺功率谱密度函数如式(5)所示,模拟得到美国五级谱轨道高低不平顺如图3所示。

图3 轨道随机不平顺时域样本

式中:Ω是空间频率,rad/m;Ωc是截断频率,rad/m,五级线路和六级线路均取为0.824 5;Sv(Ω)是轨道不平顺功率谱密度(cm2·m/rad);Av是粗糙度系数,cm2·rad/m,五级线路取为0.209 5,六级线路取为0.033 9,k一般取0.25。
德国高干扰谱轨道高低不平顺功率谱密度如式(6)所示:

式中:Sv(Ω)是轨道高低不平顺功率谱密度(m2·m/rad);Ωc是截断频率,取为0.824 6;Ω为空间频率,rad/m;Av是粗糙度系数,m2·m/rad,取为1.08×10-6;Ωr为截断频率,rad/m,取为0.020 6。
SIMPACK中轨道不平顺的生成有两种方式,一种是利用实测轨道不平顺数据建立*.tre 文件,SIMPACK 可以直接识别该种轨道不平顺;另一种是通过设置功率谱密度得到时域轨道不平顺激励,本文采用的是后一种方法[11]。
1.4 计算参数
本文以地铁B 型车为研究对象,扣件选常用的DTVI2 扣件,扣件间距取为0.6 m[12]。B 型车的车辆参数和扣件参数见文献[13],本文取动车参数进行计算。钢轨参数如表1所示。

表1 钢轨参数
1.5 模型验证
杨尚福对深圳某地铁进行了实测,得到了钢轨的位移数据[14]。本文根据文献[14]中的工况和参数,建立了二维数值分析模型,采用美国六级谱轨道高低不平顺,得到了两扣件跨中处钢轨的垂向位移。文献[14]的计算结果和本文计算结果如图4 所示。计算得到扣件跨中钢轨最大位移在0.5 mm 左右波动,文献中的实测扣件跨中钢轨最大位移在0.45 mm到0.52 mm之间波动,本文计算结果和文献中的实测数据吻合良好,验证了本文中所建立的基于二维的车辆-轨道耦合动力学数值分析模型是正确的。
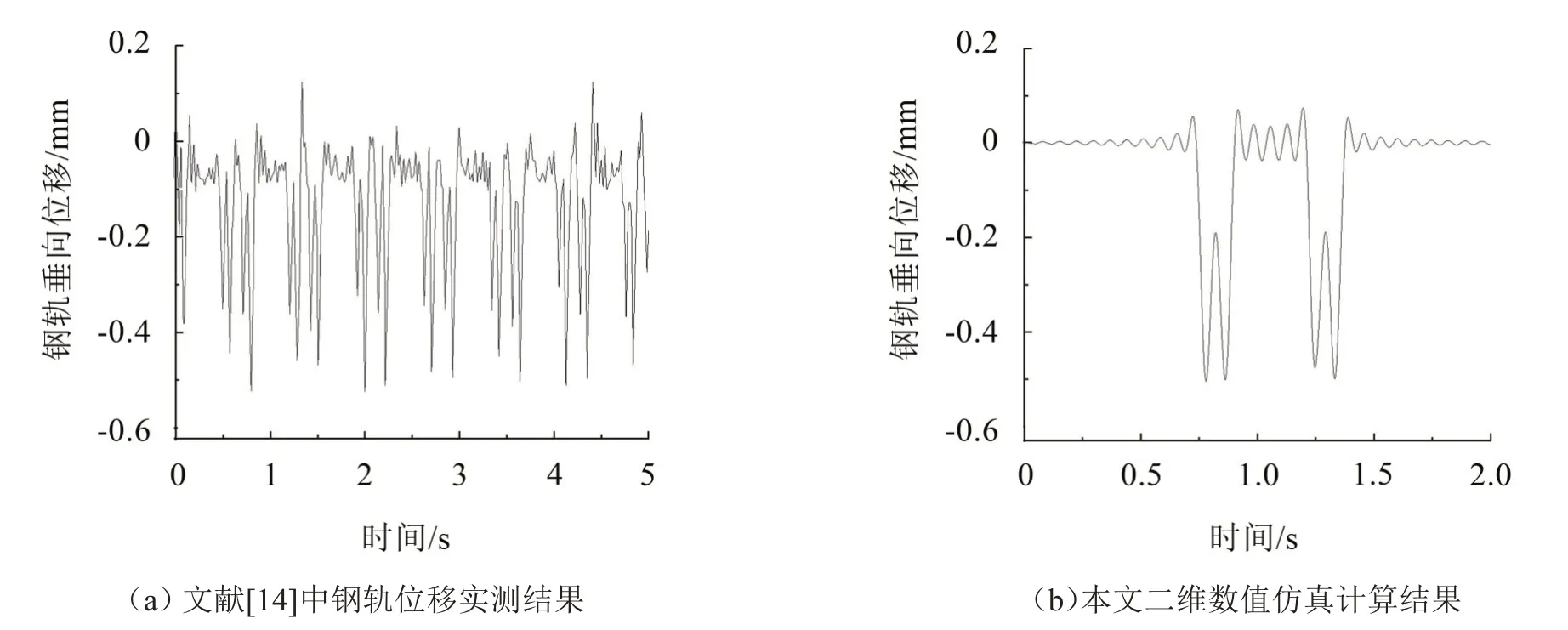
图4 钢轨位移的对比验证
曲翔宇利用ABAQUS 和SIMPACK 建立了车辆-轨道耦合联合仿真模型,得到了钢轨支座反力数据,并与频域理论解析模型的计算结果进行了对比,结果基本吻合[13]。本文根据文献[13]中的工况及计算结果对钢轨支座反力进行了验证。文献[13]的结果和本文计算结果如图5所示。文献中计算得到的最大支座反力在21 kN到25 kN之间波动,本文计算得到的最大支座反力约为20 kN。两者在数值上有差异,可能的原因有以下几点:文献[13]中同时考虑了实测的车轮不圆顺和钢轨粗糙度,本文采用美国六级谱;文献[13]中有6 节车厢,本文由于计算条件的限制,只取了1节车厢;所以本文的验证条件和文献[13]并不完全相同。但在支座反力的总体结果和呈现的规律性上,本文和文献[13]是相一致的,这表明本文通过ABAQUS和SIMPACK联合仿真建立的三维有限元模型是正确的。

图5 钢轨支座反力的对比验证
2 计算结果与分析
在实际中地铁并不是理想匀速运行,其速度变化情况复杂,为简化模型,本文假定在试验区间地铁列车是匀速通过的。通过基于二维的车辆-轨道耦合动力学数值分析模型和三维有限元模型,以随机轨道不平顺和车辆运行速度为研究参数,探究了:
(1)车速不同、轨道不平顺相同时整体式道床轨道的振动特性;
(2)车速相同、轨道不平顺不同时的整体式道床轨道的振动特性;
(3)对二维模型和三维模型的计算结果进行了比较和分析。
具体计算结果如表2 和图6 所示。从表2 中钢轨最大振动加速度数据可知,运行车速为60 km/h时,在德国高干扰谱、美国六级谱、美国五级谱激励下,钢轨最大振动加速度逐渐增大。当运行车速为80 km/h 和100 km/h 时,在美国六级谱、德国高干扰谱、美国五级谱激励下,钢轨的最大振动加速度逐渐增大。同种轨道不平顺激励下,钢轨振动加速度有随车速增大而增大的趋势。由三维有限元法计算得到的最大钢轨振动加速度总体上比根据二维数值分析法得到的最大钢轨振动加速度数值大。相同车速下,钢轨振动加速度的取值随轨道不平顺波动范围的增大而增大。车速一定时,美国五级谱激励下的钢轨振动加速度取得最大值。

图6 运行车速为80 km/h的时域轮轨力
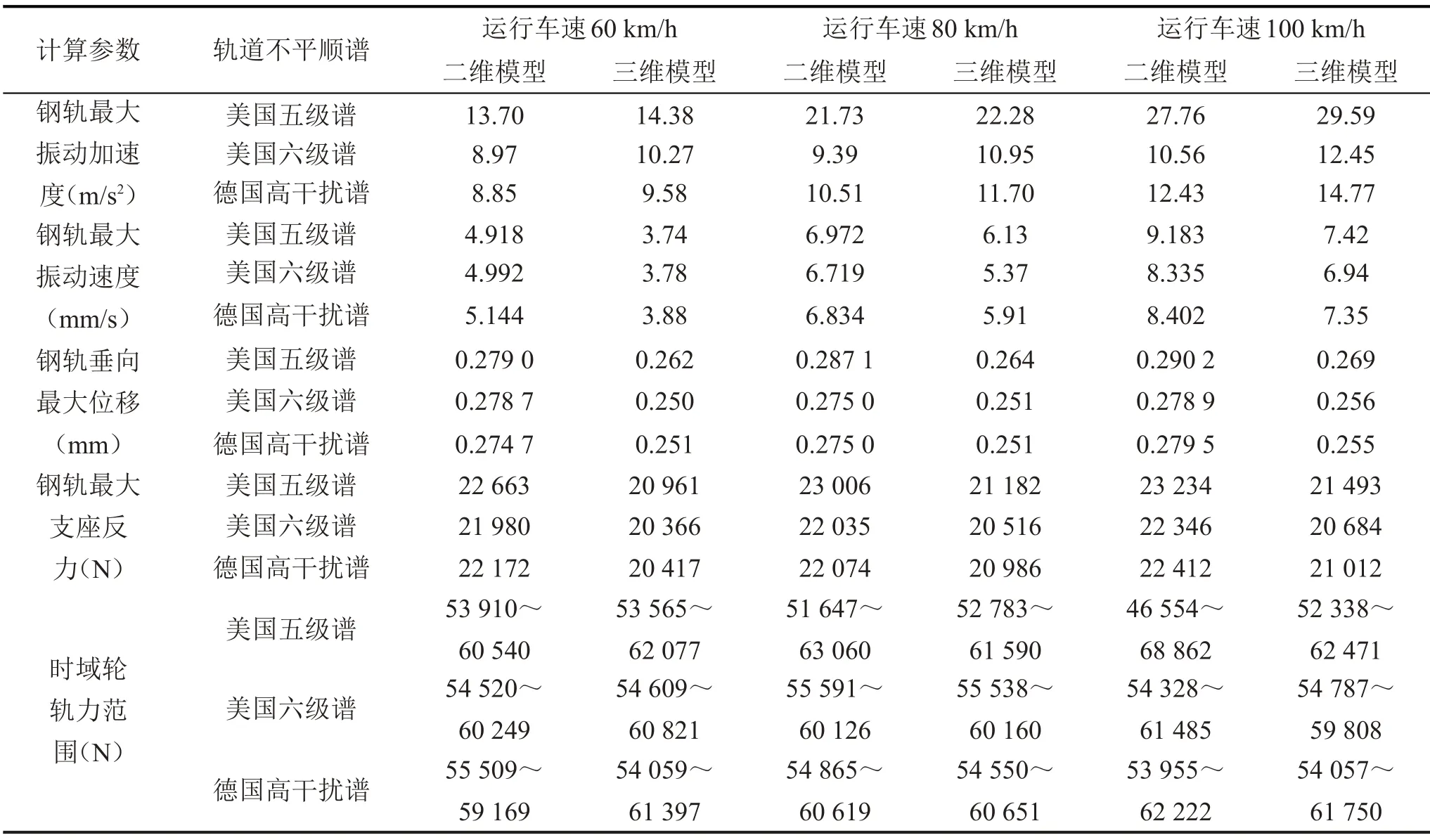
表2 随机不平顺激励下整体道床式轨道的振动响应
由表2 中钢轨最大振动速度数据可知,运行车速为60 km/h时,在美国五级谱、美国六级谱、德国高干扰谱激励下,钢轨最大振动速度逐渐递增。运行车速为80 km/h和100 km/h时,在美国六级谱、德国高干扰谱、美国五级谱激励下,钢轨最大振动速度逐渐增大。车速越大,模拟的轨道不平顺截止频率范围越大,同种轨道不平顺谱激励下钢轨的最大振动速度也越大,轨道不平顺截止频率范围与钢轨最大振动速度呈现出了一定的相关性。运行车速在80 km/h及以上时,钢轨的最大振动速度与轨道不平顺的波动范围相关,轨道不平顺波动范围越大,钢轨的最大振动速度越大。相同条件下,由二维数值分析法得到的钢轨最大振动速度大于三维有限元法的计算结果,这是由于三维有限元法中考虑了轮轨蠕滑力,且采用的柔性钢轨计算长度较短,自振频率相对较高。车速为60 km/h、80 km/h、100 km/h 时,在美国五级谱激励下,根据二维数值仿真模型和三维有限元模型计算得到的最大钢轨垂向振动速度分别为:4.918 mm/s、6.972 mm/s、9.183 mm/s,3.88 mm/s、6.13 mm/s、7.42 mm/s。
从表2 中钢轨最大垂向位移数据可知,在同一计算模型、同一速度条件下,在美国六级谱、德国高干扰谱、美国五级谱激励下,钢轨的垂向最大位移逐渐增大,由不同激励谱得到的钢轨最大位移在数值上的最大差异在5%以内。同种轨道不平顺激励下钢轨最大垂向位移随车速的增大而增大。车速越大,所模拟的轨道不平顺的截断频率范围的越大,因此在实际工程中需要注意防范轨道的中短波不平顺,特别是波长1 m以下的不平顺。相同车速时,钢轨最大垂向位移随轨道不平顺波动范围的增大而增大,轨道不平顺条件越差,钢轨最大垂向位移越大。由二维数值分析法计算得到的钢轨最大垂向位移大于由三维有限元法得到的结果,因为在三维有限元模型中DTVI2扣件被简化为线性弹簧连接着钢轨和道床,钢轨位移的监测点置于钢轨底部,钢轨自身的弯曲和剪切都未计算在内;二维数值分析模型中采用的是Timoshenko梁,其振动微分方程中包含了梁的剪切和弯曲,计算得到的钢轨垂向位移不是钢轨底部的位移,因此在数值上略大。车速为60 km/h、80 km/h、100 km/h时,在美国五级谱激励下,由二维数值仿真模型和三维有限元模型得到的钢轨垂向最大位移分别为0.279 0 mm、0.287 1 mm、0.290 2 mm,0.262 mm、0.264 mm、0.269 mm。
从表2中钢轨最大支座反力数据可知。在同一计算模型、相同车速条件下,在美国六级谱、德国高干扰谱、美国五级谱作用下,最大钢轨支座反力逐渐变大,数值上的最大差异在4.5%以内,这与轨道不平顺在时域中的波动范围相关,轨道不平顺在时域范围内波动越大,钢轨的最大支座反力越大;在同种轨道不平顺激励下,钢轨最大支座反力随车速增大而增大,数值上的最大差异在3%以内,模拟轨道不平顺时,车速越大,轨道不平顺的截断频率范围越大,这可能是造成钢轨最大支座反力随车速增大而增大的原因;钢轨支座反力是计算值,因此其变化规律也与钢轨垂向位移的变化规律有关。根据二维数值分析模型所得的计算结果比根据三维有限元模型的所得计算结果大。车辆-轨道系统在静平衡状态下,单个车轮承受的静载为57 408 N。在不同车速、不同轨道不平顺激励下,由二维数值模型计算得到的最大钢轨支座反力约占单个车轮静载的38.28%到40.46%;由三维有限元模型计算得到的最大钢轨支座反力约占单个车轮静载的35.48%到37.44%。车速为60 km/h、80 km/h、100 km/h 时,在美国五级谱激励下,由二维数值分析模型和三维有限元模型计算所得的最大钢轨支座反力分别为:22 663 N、23 006 N、23 234 N,20 961 N、21 182 N、21 493 N。
从表2和图6中的时域轮轨力数据可知,车辆运行速度为60 km/h时,德国高干扰谱激励下时域轮轨力的波动范围最小,美国五级谱激励下的时域轮轨力波动范围最大。车速在80 km/h以上时,同一车速下,美国六级谱、德国高干扰谱、美国五级谱激励下的时域轮轨力波动范围逐渐增大。时域轮轨力的波动范围有随着车速增大而增大的趋势。当车速大于80 km/h 时,轨道不平顺波动范围越大,计算得到的时域轮轨力变化范围越大。车速相同时,由两种方法计算得到的时域轮轨力最大波动范围都是在美国五级谱轨道不平顺激励下得到的,因此在利用时域轮轨力计算地铁轨道振动响应时,在缺乏实测轨道不平顺时,为保守起见,建议采用美国五级谱轨道不平顺谱进行激励。
3 结语
本文采用基于二维的车辆-轨道耦合动力学数值分析模型和三维有限元模型,系统研究了3 种运行车速和3种轨道不平顺激励条件下地铁整体道床式轨道的振动特性及钢轨支座反力的规律,得到了如下结论:
(1)车速一定时,钢轨的最大振动加速度、最大垂向位移和最大支座反力随轨道不平顺波动范围的增大而增大;同种轨道不平顺激励下,钢轨的最大振动加速度、最大振动速度、最大垂向位移和最大支座反力随车速的增大而增大,这与模拟轨道不平顺谱时截断频率的范围有关,车速越大,截断频率的范围越大,故在实际中要注意防范钢轨表面的中短波不平顺,特别是波长1 m以下的轨道不平顺;在设置的工况中,计算得到的钢轨最大振动加速度为29.59 m/s2,最大振动速度为9.183 mm/s,最大垂向位移为0.290 2 mm,钢轨最大支座反力为23 230 N,这些均是在运行速度为100 km/h、美国五级谱激励条件下得到的。
(2)由二维数值分析法计算得到的钢轨支座反力约占单个车轮所受静载的38.28%到40.46%;由三维有限元法计算得到的钢轨支座反力约占单个车轮所受静载的35.48%到37.44%。时域轮轨力的波动范围随着车速的增大而有所增大;当车速大于80 km/h时,美国六级谱激励条件下的时域轮轨力波动范围是相对最稳定的;3种车速条件下,美国五级谱激励时的时域轮轨力波动范围是最大的。
(3)在钢轨的最大振动速度、最大振动位移、最大支座反力方面,二维数值分析法的计算结果大于三维有限元法的计算结果。车速一定时,钢轨的最大振动加速度、最大位移、最大支座反力、时域轮轨力最大波动范围均是在美国五级谱激励条件下得到的,故在实际工程中需要定期对轨道进行检修,维持良好的轨道条件,最大可能地降低轨道不平顺造成的不利影响;在模拟实际工程时,采用美国五级谱轨道不平顺激励所得到的预测结果偏保守。
猜你喜欢
汽车工程师(2021年12期)2022-01-17
哈尔滨工程大学学报(2021年10期)2021-11-05
润滑与密封(2020年9期)2020-10-10
铁道通信信号(2020年10期)2020-02-07
润滑与密封(2019年11期)2019-11-27
润滑与密封(2019年11期)2019-11-27
军事运筹与系统工程(2019年4期)2019-09-11
今日农业(2019年12期)2019-08-15
宇航计测技术(2019年1期)2019-03-25
雷达学报(2017年6期)2017-03-26
