基于多传感器的RNP水平导航仿真研究
2022-04-19 00:47屈重君祖肇梓祁鸣东
计算机仿真 2022年3期
屈重君,祖肇梓,祁鸣东
(航空工业西安飞行自动控制研究所,陕西 西安 710065)
1 引言
随着民航业的迅猛发展,空中交通流量与日俱增,为适应未来航空运输发展的需要,针对现行系统的缺点和局限性,国际民航组织(ICAO)提出了新航行系统的概念。随着新航行系统的发展,对于导航性能的要求越来越高,1991年ICAO的未来空中导航系统委员会提出,飞机应该具备精确、可重复与可预见的导航性能,被称之为所需导航性能(RNP)[1,2]。
RNP导航技术能够实现精准地沿期望航迹飞行,极大提高了飞行的效率和安全水平,增大空域容量,降低运营成本。欧美Honeywell、Smiths、Collins、Thales等公司均已有成熟的具备RNP能力的装机导航系统(设备)[3,4]。目前我国机载导航传感器的精度己能够满足RNP的应用条件要求(即能够提供满足精度要求的基本定位参数、速度参数),但自主研制满足适航要求的RNP导航系统的能力还需要进一步提升,例如水平导航参数、实际导航性能、导航参数的完好性等,这些研究内容属于水平导航的范畴。
国内研究机构目前针对RNP的研究多集中在单个设备如何提高精度,提高设备的可靠性方面,但对于整个机载导航系统的导航性能评估、完好性监控、飞行技术误差监控以及导航模式管理的研究不深入。借鉴国外实现RNP的成功经验,要实现RNP的运行能力,不光要在导航设备的精度方面努力,更重要的是将目光聚焦在导航设备的完好性,实际导航性能评估以及飞行技术误差的监控等方面。
因此,有必要开展RNP导航系统的水平导航技术研究,为国产大飞机实现RNP运行奠定基础。
本文针对具有多传感器输入的机载导航系统,提出了水平导航计算方法和误差监控方法,通过导航模式管理、完好性监控、飞行误差监控以及实际导航性能评估技术实现RNP能力。
2 RNP应用分析
RNP是对指定空域内飞行的飞行器必须具备的导航性能精度的表述。如满足RNP-1要求,应实现95%的时间保持在期望航迹左右各1NM以内的范围内飞行;99.999%的时间保持在期望航迹左右各2倍RNP(2NM)范围以内[5-7]。
针对不同的飞行航段,RNP导航有不同的性能指标要求,本文采用ICAO推荐的指标,如表1所示。
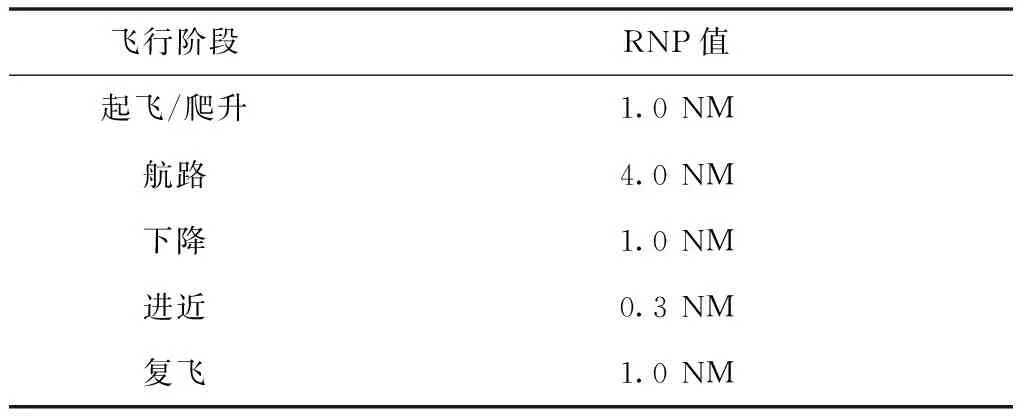
表1 各飞行阶段的RNP值
具有RNP运行资质的导航系统必须具备监视系统性能和当不满足规定性能要求时提供告警的能力。对导航系统性能的监视通常以对总系统误差(TSE)监视的方式进行[8,9]。
总系统误差包含三个分量,航迹定义误差(PDE)、飞行技术误差(FTE)和导航系统误差(NSE),如图1所示。航迹定义误差为定义航迹和期望航迹之间的误差;飞行技术误差为估计位置和定义航迹之间的误差,即控制飞机的精度,不包括误操作导致的误差;导航系统误差为飞机真实位置和估计位置之间的误差。
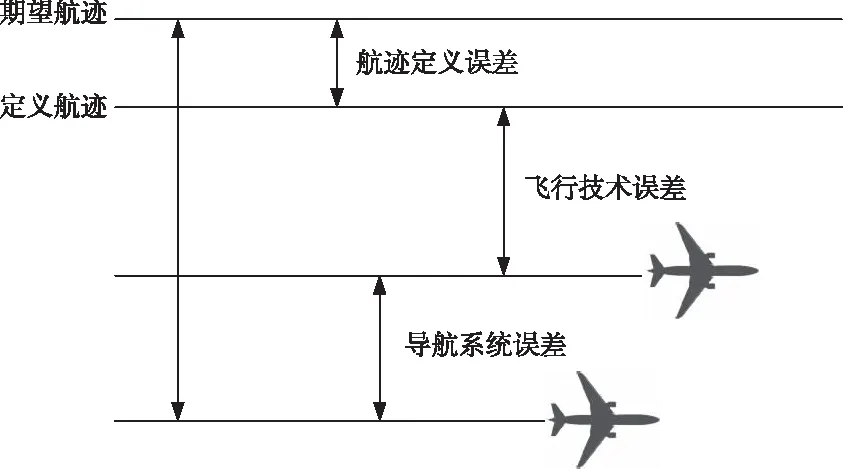
图1 总系统误差示意图
航迹定义误差通过数据库的完好性及定义航迹的功能要求进行约束,可以忽略不计。机载性能监视与告警的要素与导航系统误差和飞行技术误差相关[10,13]。
导航系统误差一般用实际导航性能(ANP)描述。ANP指的是在完好性满足当前RNP要求的情况下对于95%概率下的导航系统精度的估计。ANP以海里为单位,表示一个以估计位置为圆心、ANP值为半径的圆形区域,飞行器的位置在该圆形区域的概率为95%。系统实时计算并显示ANP,当ANP超出RNP时告警。
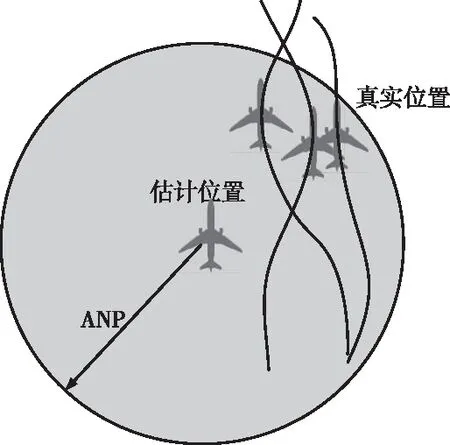
图2 位置误差与ANP示意图
飞行技术误差与飞行机组人员或自动驾驶仪沿定义的航径或航迹运行的能力有关。对于飞行技术误差,只提供监视手段,无告警。飞行技术误差体现为航迹偏离,根据RNP导航要求,必须在飞行员主视野内(如主飞行显示PFD)提供航迹偏离显示,并且偏离刻度必须与当前飞行阶段要求的精度相适应。
3 RNP水平导航方法
3.1 导航模式管理方法
导航系统接收并处理来自机载导航传感器(GPS、IRS、DME、VOR、ADC等)的信息,在满足导航精度的前提下,选择满足当前飞行阶段完好性要求的导航传感器(或者模式),按以下优先级选择。
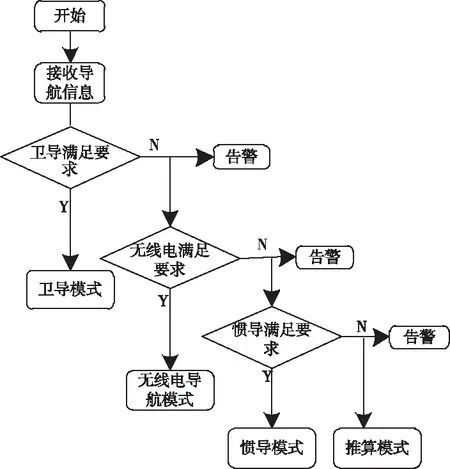
图3 导航模式管理算法
1) GPS(GPS/INS)
2) DME/DME
3) DME/VOR
4) 惯性导航
5) 航位推算
GPS是支持RNP运行的主要导航源。当GPS满足完好性时,系统选择GPS导航模式。当GPS不满足完好性要求时,切换到次优的导航模式。
由于DME/DME定位方式精度比VOR/DME精度高,优先选取DME/DME定位,用飞机到“DME/DME”台的斜距计算位置;当没有符合要求的DME/DME台时,采用VOR/DME定位,将同站安装的DME距离和VOR方位结合起来计算位置[10]。
当GPS和无线电导航均不可用时,切换到惯性导航模式。当处于GPS导航模式、DME/DME导航模式或VOR/DME导航模式时,计算系统位置和惯性位置的偏差量。当惯性导航模式被激活时,用这个偏差量校正惯性位置。当有多套惯导可用时,惯性位置为所有可用惯导的位置的加权平均值。
当外部传感器输入数据不能维持以上导航模式时,切换到航位推算模式。系统根据IRS或AHRS航向、ADC真空速输入,以及最后确定的飞机位置和风速,执行航位推算。
3.2 完好性计算
基于GPS的完好性(HIL)由接收机完好性监控(RAIM)计算提供[11,12]。HIL单位为海里,代表了一个圆半径,以GPS估计位置为圆心,真实位置在所有情况下(无故障和故障情况)落在园内的概率为99.99999%。系统将GPS计算的HIL与当前飞行阶段要求的告警门限相比较,当HIL超出告警门限时,发出完好性丧失的告警。告警门限等于飞行阶段的RNP值。
HIL的计算方法如下。
卫星系统量测方程为
y=Gx+ε
(1)
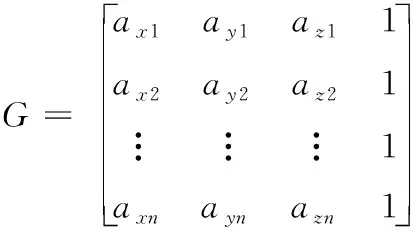
(2)
(3)

(4)
其中y为带噪声的量测量,G为相关矩阵,ɛ为测量误差向量,xsi,ysi,zsi为第i颗卫星的三维位置,xu,yu,zu为用户位置。
伪距残差向量为:

(5)
令S=In-(GTG)-1GT,则有:w=S·y=S·ε,最小二乘残差法检验统计量:SSE=wTw。
在正常误差条件下,判决统计量SSE服从自由度为n-4的χ2分布。对于给定的虚警率PFD和漏警率PMD,应满足以下关系式:

(6)

(7)
根据DO-229的要求,虚警率和漏警率取为PFD=10-5/h,PMD=0.001。可以计算得到非中心化参数λ。
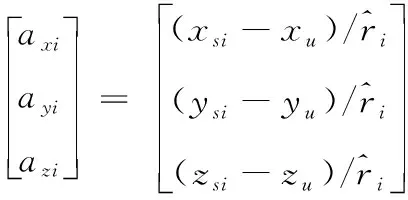
HIL算法如图4所示,图中横轴代表检测统计量,T是检测门限,若检测统计量大于T,则认为存在故障;纵轴代表定位误差。每颗卫星都有对应的斜率Ki,斜率Ki越大越容易发生漏检。所以,如果最大斜率Kmax的卫星发生故障时不产生漏检,那么其它卫星发生故障时也不会产生漏检。HIL即假设最难检测的卫星出现故障,达到检测门限时对应的水平误差范围。
图4 HIL算法示意图
第i颗星的斜率为
(8)
A=(GTG)-1GT
(9)
S=In-G(GTG)-1GT
(10)
斜率的最大值

(11)

(12)
无线电导航系统(DME、VOR)的完好性由地面设备提供,地面设备连续地监控发送的信号,如果检测到了超出容限的情况,会关闭发送机,则无线电信号丧失,这时机载接收机输出的标志位将指示完好性不满足。
3.3 实际导航性能评估计算
实际导航性能ANP是实际计算的导航系统精度,当ANP超出RNP时告警。计算ANP时不考虑以下因素:
a. 导航系统的硬件故障或软件误差
b. 飞行技术误差
c. 报告位置使用的时钟误差
d. 导航数据库数据的位置误差或人工输入错误的航路点引起的位置误差
e. 当地坐标系与WGS-84坐标系之间的误差
各导航模式的ANP计算如下:
1)GPS导航模式ANP计算
当GPS是当前导航模式,且HIL满足当前飞行阶段的限制时,利用HIL值来计算ANP。HIL由RAIM功能计算得到,代表99.99999%概率的位置估计误差。
ANP=K*HIL(如果HIL可用)
(13)
其中K是系统配置值,k的取值在0.5~0.6之间,ANP代表大约95%概率的径向位置误差。
2)DME/DME导航模式ANP计算
DME的系统误差为

(14)
其中,D为距DME台的距离,单位为海里。
DME/DME导航模式下,定位误差方差为:

(15)
其中,α为两个DME地面台与飞机连线之间的夹角。
根据ANP定义,定位误差小于ANP值的概率为95%,因此
ANP=1.96σPEE
(16)
3)DME/VOR导航模式ANP计算
VOR的系统误差为

(17)
其中,D为距VOR台的距离,单位为海里。
DME/VOR导航模式下,定位误差方差为

(18)
根据ANP定义,定位误差小于ANP值的概率为95%,因此
ANP=1.96σPEE
(19)
飞行技术误差是控制系统自身的误差,具有一定的统计规律。该误差与人为操纵错误无关,与控制系统故障引起的误差无关。考虑到飞行的安全性,将偏航距做保守处理近似等价为飞行技术误差。
3.4 总系统误差监视技术
总系统误差的监视采用将ANP和FTE两个分量综合起来进行监视的方式。在主飞行显示(PFD)的底部显示导航性能刻度,提供FTE、ANP与RNP的相对关系显示。
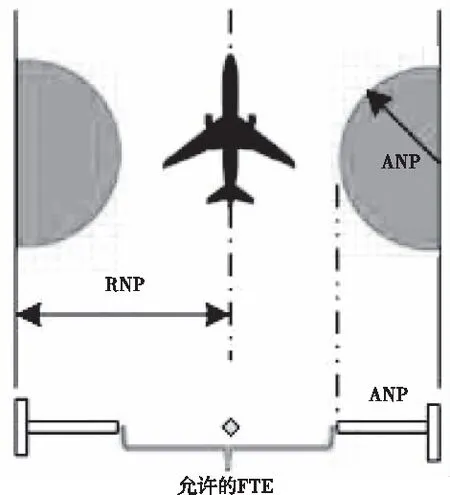
图5 ANP与FTE示意图
飞机位置由刻度上的中央标记表示,由中央标记到外侧标记之间距离指示的偏离等于RNP值。如果RNP等于1海里,则中央标记与外侧标记之间的距离表示1海里。ANP指示杆的长度代表ANP的大小,ANP指示杆随着ANP值的增大向刻度中心延长。偏离指针表示水平偏离情况,偏离刻度与RNP成比例。
ANP指示杆之间的空隙表示使飞机位置保持在该段航路RNP之内偏离指针的范围,代表允许的飞行技术误差。
如果两端的ANP指示杆在中间相遇,说明ANP等于或超过RNP,则指示杆和刻度变为琥珀色,并显示RNP不可用的告警信息。
如果偏离指针与ANP指示杆区域重合,意味着FTE与ANP之和超出RNP,即总系统误差可能超出RNP,则刻度和ANP指示杆变为琥珀色,指针闪烁,提示飞行员。
4 仿真分析
在数字仿真系统中对设计的RNP导航功能进行仿真。根据RTCA/DO-236C标准的要求设置各导航传感器的测量误差,并采用西安咸阳机场到北京首都机场的真实民用航线进行飞行仿真。
飞机动力学模型采用B737-800型全动态模型进行仿真。
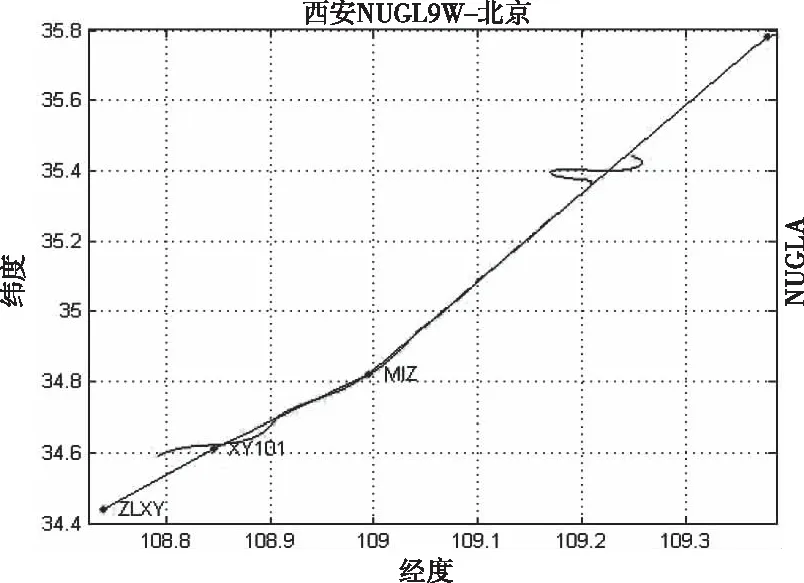
图6 西安-北京航线
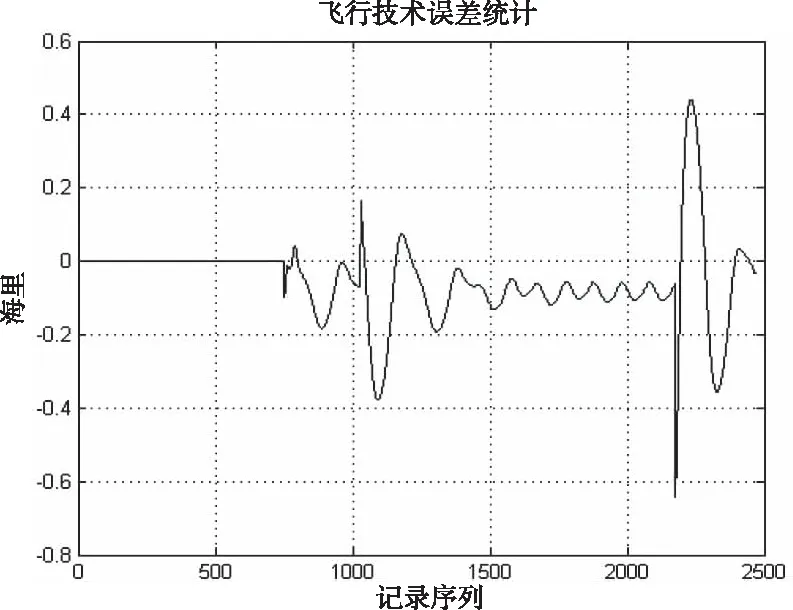
图7 飞行技术误差统计曲线
在巡航阶段,先后注入GPS故障,DME单通道故障,使系统在3000s~4200s工作在DME/DME导航模式,在4200s~5400s工作在DME/VOR导航模式,其它阶段均工作在GPS导航模式。飞行阶段RNP值及导航模式如图8所示。
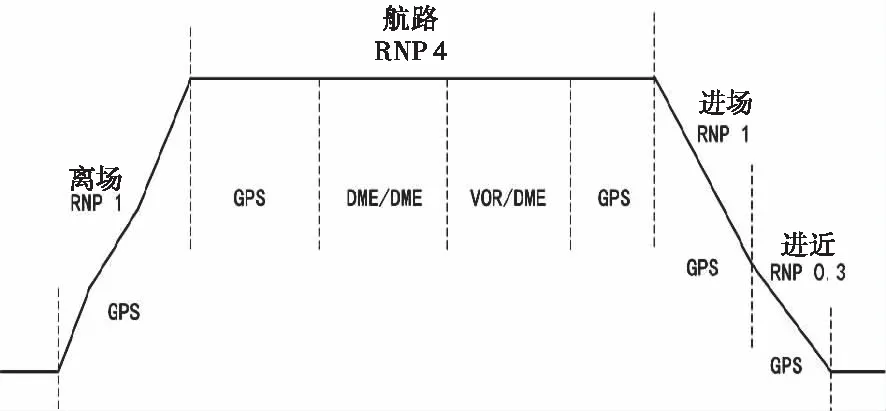
图8 飞行阶段RNP值及导航模式
定位误差与ANP值如图9所示。
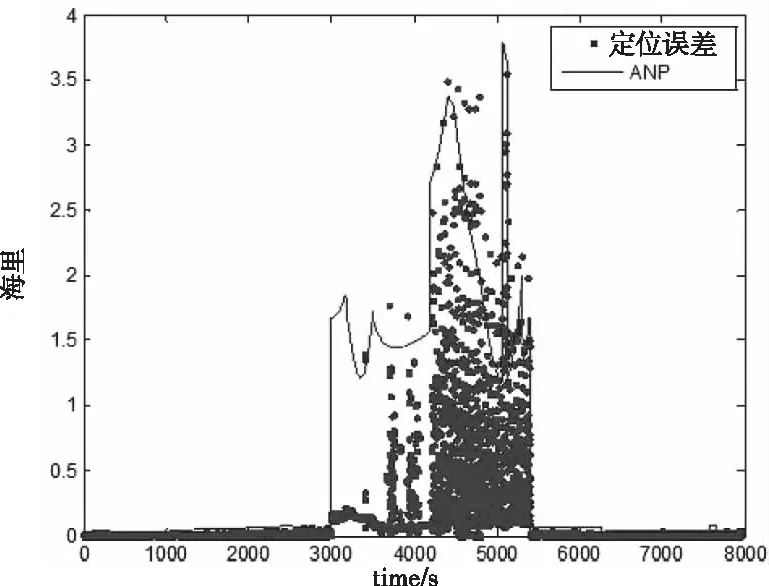
图9 定位误差与ANP
在各导航模式下,定位误差落入ANP范围之内的点超过95%,即计算的ANP值满足95%的位置误差估计。
经过分析图9中的仿真数据可知,GPS导航模式下,位置估计误差在0.07NM以内,小于所需的性能指标,能够满足RNP-0.3的要求。DME/DME导航模式下,位置估计误差在2NM以内,能够满足RNP-4的要求。VOR/DME导航模式下,位置估计误差在4NM以内,能够满足RNP-4的要求。因此在设计的机载导航模式下,能够满足ICAO提出的航路段和进近段要求。
5 结论
本文针对机载独立的多传感器导航设备,设计了水平导航计算方法,给出不同导航模式下的完好性监控算法和实际导航性能评估算法。通过在动态数字仿真系统上,将西安咸阳机场到北京首都机场的真实RNP航路作为仿真的目标航线,进行了飞行仿真,结果表明本文所提的方法能够满足导航精度要求,是一种可行的机载水平导航的有效方案。
猜你喜欢
航空学报(2022年9期)2022-10-14
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
现代计算机(2021年5期)2021-04-01
黑龙江教育·中学(2018年1期)2018-04-02
校园英语·中旬(2017年18期)2018-03-05
中学生理科应试(2017年2期)2017-04-01
中国市场(2016年36期)2016-10-19
科教导刊(2015年16期)2015-07-02
中学生数理化·八年级物理人教版(2014年2期)2014-04-02