
基于改进动态矩阵算法的SCR烟气脱硝系统
2022-04-14 06:30姜媛媛
哈尔滨商业大学学报(自然科学版) 2022年2期
陈 静,洪 乔,姜媛媛
(安徽理工大学 电气与信息工程学院,安徽 淮南 232001)
目前在国内,绝大多数燃煤发电机组火电脱硝系统NOx出口质量浓度控制效果差,直接导致火电锅炉中的进出口NOx含量超标及氨大量逃逸,释放过量的氨基硫酸氨造成空气二次污染,损坏脱硫塔、除尘设备.根据环境保护部要求,燃煤发电机组实现超低NOx排放[1].改进SCR脱硝系统的控制显得至关重要,NOx出口质量浓度稳定控制更是其研究的关键.何军林等人针对SCR烟气脱硝经典控制策略做了分析研究[2].刘宗奎等加入前馈环节对SCR脱硝系统控制进行动态补偿[3].李刚等提出了史密斯串级控制策略,控制系统快速性得到改善[4].文献[5]应用预测控制优化SCR脱硝控制策略.文献[6]中给出采用模型预测的脱硝系统优化计算,使氨逃逸率下降.文献[7-8]采用DMC算法优化脱硝控制系统,抗干扰能力明显改善.文献[9]设计了一组多模型动态矩阵的喷氨优化控制器,改善了NOx出口含量波动.但是,被控对象的时变性和外界干扰等因素会扩大预测值与实际输出值的偏差,使用DMC控制算法时,需要对控制输出进行补偿.刘斌等人采用最小二乘法在线辨识,修正模型参数,改善控制性能[10].马平等人将DMC算法与前馈控制结构相结合,明显改善了摩尔比烟气脱硝控制[11].赵海娟等人设计了前馈控制器补偿扰动量,减小预测控制器误差[12].当预测值与实际输出值偏差较大时,上述补偿措施仅利用当前偏差对预测进行校正,容易造成过补偿或欠补偿.为了解决这一问题,本文提出采用模糊自适应性PID补偿的DMC控制算法,在动态矩阵控制器基础上加入模糊自适应性PID(Fuzzy Adaptive PID,FA-PID)实现对预测控制偏差的精准补偿.
1 SCR脱硝系统NOx质量浓度的动态矩阵预测控制
1.1 SCR脱硝系统介绍
污染物的NOx排放主要为一氧化氮和二氧化氮,火电机组SCR脱硝系统通过往烟气内喷入氨,实现氮氧化物净化的目标,具有脱氮效率高、技术成熟、无二次污染、可靠等优点.SCR烟气脱硝工艺流程如图1所示.

图1 SCR脱硝工艺流程图
SCR脱硝属于复杂的化学反应,易被多种因素影响,具有复杂性、时变性、大滞后等特点,现有喷氨量控制策略无法及时根据当前状态调节喷氨量,控制效果差.本文采用DMC控制算法,通过SCR系统预测未来一段时间内的出口NOx质量浓度,优化调整一段时间内的喷氨量,实现NOx出口质量浓度的提前控制.
1.2 动态矩阵预测控制
预测模型作为DMC控制的基础,在此基础之上应用了在线滚动优化指标,并且还加入了反馈校正策略,目的是为了减小被控对象的未知性,滞后性与时变性的影响,进而实现预测控制.
1.2.1 预测模型

(1)

对于有M个连续控制增量输入的系统其输出预测值如下:
(2)
1.2.2 滚动优化

在有限的时间域中求解性能指标函数进而获取最好的控制量,其优化性能指标函数如下:

(3)
其中:ωP(k)=[ωP(k+1),ωP(k+2),…,ωP(k+P)]T;Q=diag(q1,q2,…,qP);R=diag(r1,r2,…,rM).

(4)
式(4)为t=kT时求得的控制增量集合.本算法只用求得的最优控制增量序列中的Δu(k)与u(k-1)相加生成u(k)作用于系统的执行机构.
式(4)计算得到最优控制增量序列只取首元素,则:
(5)
dT=CT(ATQA+R)-1ATQ[d1…dP]
(6)
其中:dT称为控制向量,CT=[1 0 … 0].
1.2.3 反馈校正
在下一个采样周期,为避免干扰或者其他因素导致的误差,DM算法中利用反馈信息构成闭环补偿来修正输出.下一时刻的输出预测值为
(7)
DMC控制中反馈校正根据预测偏差值修正控制器输出,预测偏差为:
(8)
其中:y(k+1)是第(k+1)时刻控制系统被控对象的实际输出.
输出偏差反映了动态矩阵控制算法预测模型中各种干扰、时变性等各种各样的不确定性因素对预测结果的影响,偏差用以更新预测输出向量取值.计算公式为:
(9)

N|k+1)]T
(10)
随着时间推移,偏差校正后的输出预测值也需要对其进行位移操作,作为(k+1)时刻的初始预测值.式(11)为其向量形式:

(11)
DMC控制算法结构如图2所示.

图2 DMC控制算法结构
由于在实际应用时有干扰、模型出现误差和一些其他未知的影响因素,DMC控制中的反馈校正环节消除偏差效果并不理想,故利用FA-PID控制器将预测偏差量模糊化,进而修正控制DMC控制器的输出,共同控制被控对象,减弱偏差过大时对系统控制性能造成的影响.
2 基于模糊自适应PID补偿的动态矩阵预测控制
2.1 模糊自适应PID控制算法
FA-PID算法是用PID算法控制,模糊部分在线调整PID参数.在受到外界干扰或是被控对象发生改变时,该算法能够实现自适应,改善了PID工作时的动态特性.由被控对象的数学模型确定的参数为KP0、KI0、KD0,以及偏差e和偏差变化率ec,FA-PID推理工作是在事先参定下的模糊规则中实现的,PID控制器的矫正量如下式所示:
(12)
模糊自整定是不断计算偏差e和ec偏差变化率,依据模糊控制规则检测偏差值和推理,从而修正PID三个参数KP、KI、KD.
2.2 基于模糊自适应PID补偿的动态矩阵预测控制算法
由于存在模型失配、被控对象时变性或外界环境干扰等因素,DMC算法预测值与实际输出值偏差较大.本文提出FA-PID控制用于补偿DMC控制器输出,既能保证系统的提前控制,又能提高系统的准确性、抗干扰性.算法结构如图3所示.
图3中动态矩阵预测控制算法反馈校正得到的差值作为FA-PID的输入误差.由动态矩阵控制输出的控制增量Δu1(k)加上FA-PID控制输出Δu2(k)得到系统最后的控制输出,再与上一时刻的控制量u(k-1)一起作用于SCR脱硝喷氨阀门控制,结合后的控制器更加灵活且具有更好的抗干扰性与鲁棒性.
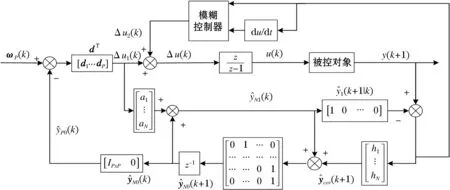
图3 FA-PID补偿DMC控制器结构
3 系统仿真
3.1 构建SCR脱硝模型
SCR脱硝系统具有滞后性、大惯性的特点,是一个带纯延时的二阶惯性系统,表示为:
(13)
其中:k为G(s)的比例增益;τ为G(s)的滞后延时时间;T1、T2为G(s)的惯性时间常数;ΔY(s)为SCR出口NOx质量浓度变化量;ΔU(s)为喷氨阀门(流量)开度.
图4为500 MW下脱硝对象的阶跃响应曲线.虚线为辨识后的模型.

图4 500 MW火电机组的阶跃响应曲线
通过作图法求得其传递函数为:
(14)
3.2 仿真结果分析
为了验证FA-PID补偿DMC控制算法在火电机组SCR脱硝系统中的可行性和有效性,本文仿真实验依托Matlab/Simulink实现,分别搭建了DMC控制算法以及FA-PID补偿的DMC控制算法仿真模型,并运行观察结果.
在Matlab/Simulink中,构建FA-PID补偿DMC算法仿真系统,如图5所示.
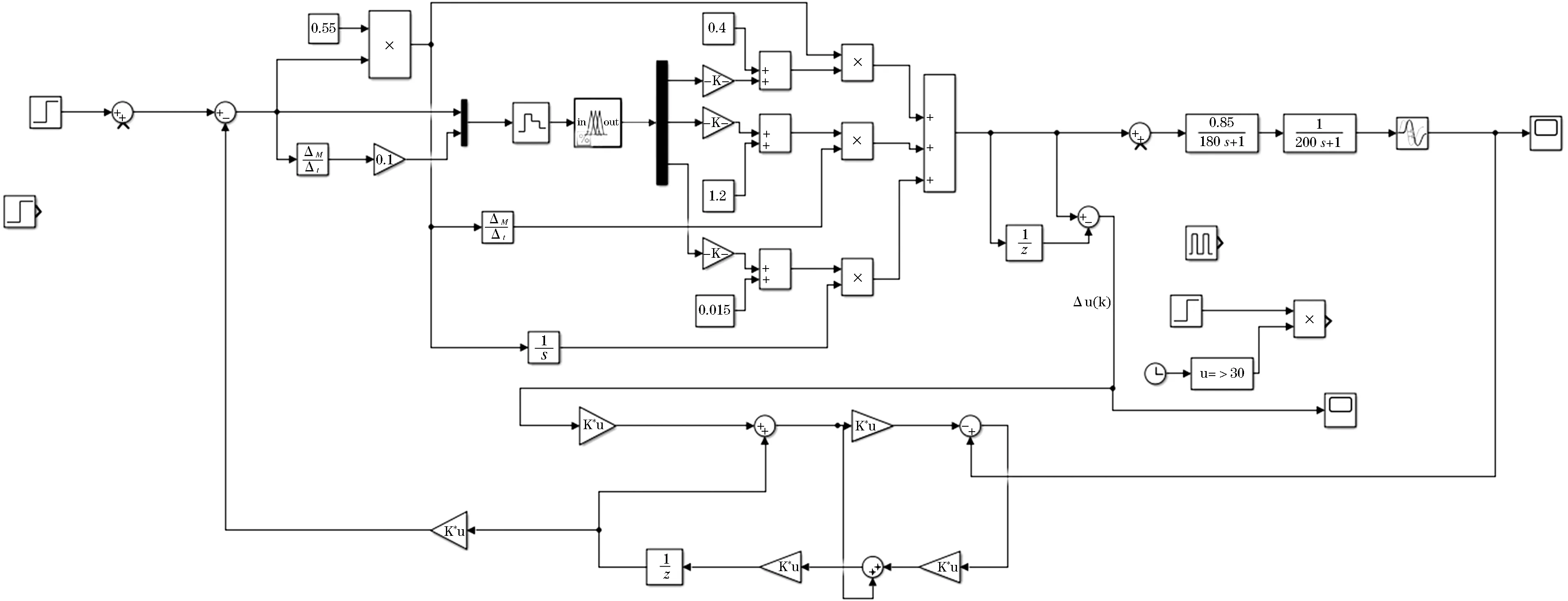
图5 FA-PID补偿动态矩阵预测控制算法仿真模型图
在搭建好仿真模型后,分别进行了两种控制方式下喷氨阀门开度变化和NOx出口质量浓度变化对比实验,仿真时间设为3 000 s,如图6、7所示.
考虑到实际应用环境中难免存在干扰或者设定值改变等情况,本文也验证了算法的抗干扰能力由图6、7可知:

图6 两种控制方式下喷氨阀门开度变化
1)对于设定值阶跃变化,FA-PID补偿DMC控制算法的调节时间明显小于DMC控制,且超调较小,实现稳定控制.
图7 两种控制方式下NOx出口质量浓度变化
2)对于外加阶跃扰动,FA-PID补偿DMC控制算法响应速度快,调节时间小,抗干扰能力明显提升.综合考虑稳态和动态性能,基于FA-PID补偿的DMC控制性能更好.
4 结 语
本文提出了一种模糊自适应PID补偿优化DMC控制算法,解决了SCR烟气脱硝系统的NOx出口质量浓度波动大、稳定性差的问题.DMC控制算法是一种实时预测并不断优化的算法,提升了控制系统实时性和鲁棒性;FA-PID算法通过构建动态前馈以修正控制动态矩阵控制器的输出,克服了外部干扰,提升了控制系统准确性.本研究中系统模型精度影响控制性能,构建更加精确的预测模型是下一步的研究方向.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
商界评论(2022年1期)2022-04-13
数学大王·趣味逻辑(2019年10期)2019-11-06
网络空间安全(2019年8期)2019-03-18
中国测试(2018年9期)2018-05-14
草原(2018年2期)2018-03-02
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
科技传播(2012年10期)2012-06-06
