
动态导航下不同深度环钻定位精确度的体外评价
2022-04-14 10:14刘思民赵一姣王晓燕王祖华
北京大学学报(医学版) 2022年1期
刘思民,赵一姣,王晓燕,王祖华△
(北京大学口腔医学院·口腔医院 1. 牙体牙髓科,2. 口腔医学数字化研究中心,国家口腔医学中心,国家口腔疾病临床医学研究中心,口腔数字化医疗技术和材料国家工程实验室,口腔数字医学北京市重点实验室,国家卫生健康委员会口腔医学计算机应用工程技术研究中心,北京 100081)
动态导航技术是一种实时追踪术区内的器械与患者位置坐标,通过配准技术将实际坐标与锥形束CT(cone beam CT,CBCT)数据的虚拟坐标对应,并经可视化技术显示在屏幕上,从而引导术者完成治疗的技术[1]。现代医学领域中,动态导航技术被广泛应用于神经外科、骨科、创伤修复等领域[1],有助于术者在术中根据术前规划明确病变及手术范围,实时调整手术策略,降低手术风险的同时提高手术的精确度与安全性[2]。
口腔医学领域中动态导航技术的应用也越来越广泛。颌面外科中,动态导航可以辅助复杂肿瘤切除术;正颌外科手术可以具有更高的精确度与更好的手术效果[3];种植领域首先在椅旁操作中引入了动态导航技术,其精确度与静态导板引导下的种植技术相比无明显差异[4],并显著优于徒手操作[5];牙髓治疗中,动态导航技术的研究也显示出相同的结论[6];在根尖手术中,动态导航技术也被证明比徒手操作有更高的精确度[7]。
然而,目前在口腔椅旁操作中关于动态导航技术的研究主要是病例报道和基于离体牙/模型牙的体外模型研究,由于牙齿及牙槽骨解剖形态的变化及不同离体模型之间的材料不同,不同实验中动态导航技术定位的偏差变化很大,缺少系统性针对动态导航技术本身精确度的研究。此外,虽然有研究提出动态导航技术定位的精确度与进入深度之间存在关联,随着深度增加导航定位的精度下降[8],但目前尚无系统研究明确二者间的关系。本实验拟通过设计标准化模型,对动态导航技术引导下不同深度环钻定位的精确度进行研究。
1 材料与方法
1.1 标准化模型的设计与打印
研究动态导航技术引导环钻在5、10、15 mm三个深度下的精确度,每个深度进行10次重复实验。首先使用Rhino 7(Robert McNeel公司,美国)软件设计标准验证模型(图1A、B)。分别在距离模型外表面5、10、15 mm的位置上预留了直径5 mm半球型的空腔作为环钻导航的目标位置。半球型空腔后部设计宽5 mm垂直于模型外表面的空腔通道,以实现打印过程中支撑材料的去除。在模型的侧面设计一个宽7.5 mm、长40 mm的悬臂,用来固定参考版。在模型上方预留一个宽4.4 mm的凹槽,用来放置导航所需要的配准装置。
设计模型的数据以 .stl格式导出,上传到Objet 30 Prime打印机(Stratasys公司,美国),使用Veroclear树脂(Stratasys公司,美国)以Glossy模式打印模型,确保预留的空腔内无支撑材料。
1.2 拍摄模型CBCT与入路设计
将美佳印硅橡胶印模材料(沪鸽公司,中国)调拌均匀并放入配准装置中,将配准装置按压在预留的凹槽中,待硅橡胶完全固化后对模型进行CBCT扫描(New Tom VGi, QR公司,层厚125 μm,FOV 8 cm×8 cm,电压110 kV,电流4.00 mA),所得数据以DICOM格式保存,并导入动态导航软件系统(迪凯尔公司,中国)。使用图1C中种植动态导航软件规划的环钻入路设计,使用图1D中直径4.5 mm的去骨环钻(长沙天天,中国)。选择直径为4.5 mm,主体为无锥度圆柱体的种植体用作入路设计。在轴向面及矢状位上按图1E和图1F的标准调整种植体的计划位置:(1)深度:种植体螺纹最前端与软件中半球体的前部相切,(2)二维位置:种植体的中轴线过后部空腔通道的中线,(3)角度:种植体的边缘与模型边缘线的夹角为90°。此过程中可以利用种植体周骨密度图辅助判断种植体路径是否规划的合适,密度图中,种植体最深面骨密度应均匀且低于位于模型内的其余部分(图1G)。通过对两个二维面中种植体计划位置的限定,将软件中种植体的三维位置确定于深度与半球体的前端相切,种植体前端中心到达半球顶点,角度垂直于模型外表面且与空腔通道的中轴线平行,将此空间位置设定为动态导航引导入路的目标位置。

A, 3D perspective view of model; B, side view of the model, reserved cavity positions at different depths; C, three dimensional image of approach design in navigation system; D, use a 4.5 mm diameter boneless ring drill; E, design drawing of the axial plane approach in the navigation system; F, design drawing of the sagittal approach in the navigation system; G, periimplant density.图1 导航入路的设计Figure 1 Design of navigation approach
1.3 动态导航下的环钻入路建立
根据DHC-D12说明书指导,将所用手机标定到系统中(图2A),将参考板与固定装置连接,模型固定于桌面上,同时固定参考版和模型的位置(图2B)。利用标定好的手机通过配准装置将实物模型与CBCT数据相匹配,导航仪的激光传感器可以通过追踪参考板实时计算出模型的空间位置,并能够在屏幕上可视化术者的操作。

A, calibrate the handpiece; B, fix the model on the table.图2 动态导航前的准备Figure 2 Preparation before dynamic navigation
将4.5 mm直径的环钻安装到慢速弯机上,手机在导航系统的引导下完成环钻入路操作。设定根尖手术中切除牙根目标长度3 mm的10%: 0.3 mm为最大二维偏差允许值和期望达到的定位精度;5°偏差角度为最大角度偏差允许值,当图3中导航仪指示距离及角度偏差≤允许值时继续钻入,当>允许值时停止钻入并调整手机角度,使距离与角度偏差达到要求。随着钻针的不断深入,导航系统的深度提示栏会显示当前剩余深度并不断改变颜色,当导航系统提示深度到达0.0 mm时停止钻入(图3)。按照上述标准对深度5、10和15 mm的半球各完成10次入路。

A and D, model and trephine bur from three-dimensional perspective; B, sagittal plane of model; C, horizontal plane of model; E, distance tolerance; F, angle tolerance; G, in the 5 mm group, the trephine bur was guided to a depth of 0.1 mm under navigation; H, guide the trephine bur into the depth of 3.0 mm, and the color of the depth prompt column changes; I, depth reaches target position.图3 动态导航下的操作Figure 3 Operation under dynamic navigation
1.4 导航精确度评价
使用与术前相同的拍摄条件拍摄术后模型CBCT,将DICOM数据导入MIMICS21(Materialise公司,美国)软件并重建术后模型的三维结构(图4A)。将重建模型以 .stl格式导出到Geomagic Control软件(Geomagic公司,美国),在Geomagic软件中拟合出每一个环钻入路的通道,并计算出动态导航引导钻针终点与计划位置的二维距离偏差、三维距离偏差、深度偏差、角度偏差、与初始位置的距离偏差(图4B),其中,二维距离偏差定义为实际入路的终点与计划入路的终点在不考虑深度偏差下的距离,三维距离偏差定义为实际入路终点与计划入路终点在空间中的距离,与初始位置偏差定义为实际入路起点与计划入路起点的距离,图4C为空间模型示意图。
将数据导入SPSS 26.0统计软件(IBM公司,美国),分析不同进入深度下导航终点位置与目标位置的角度偏差,计算平均值与标准差。使用ANOVA单因素方差分析,显著性标准设定为P<0.01,计算不同进入深度组之间的数据差异是否有统计学意义,如组间差异有统计学意义,则采用LSD事后检验法分析每两个不同深度组间数据的差异是否有统计学意义。

A, the postoperative model was reconstructed in MIMICS software; B, fit the drill needle approach in Geomagic software; C, navigation approach deviation analysis diagram. a, 2D distance deviation; b, depth deviation; c, 3D distance deviation; d, angle deviation; e, initial position deviation.图4 定位精度与角度偏差的评估Figure 4 Evaluation of positioning accuracy and angle deviation
2 结果
5、10、15 mm深度下动态导航终点位置与目标位置的二维距离偏差、深度偏差、三维距离偏差、角度偏差以及初始位置偏差见表1。随着动态导航引导下进入深度的增加,其在二维位置、空间位置及深度上与目标位点的偏差逐渐增大。不同进入深度下导航终点的二维位置偏差、深度偏差与三维位置偏差的差异均有统计学意义(表1、2)。
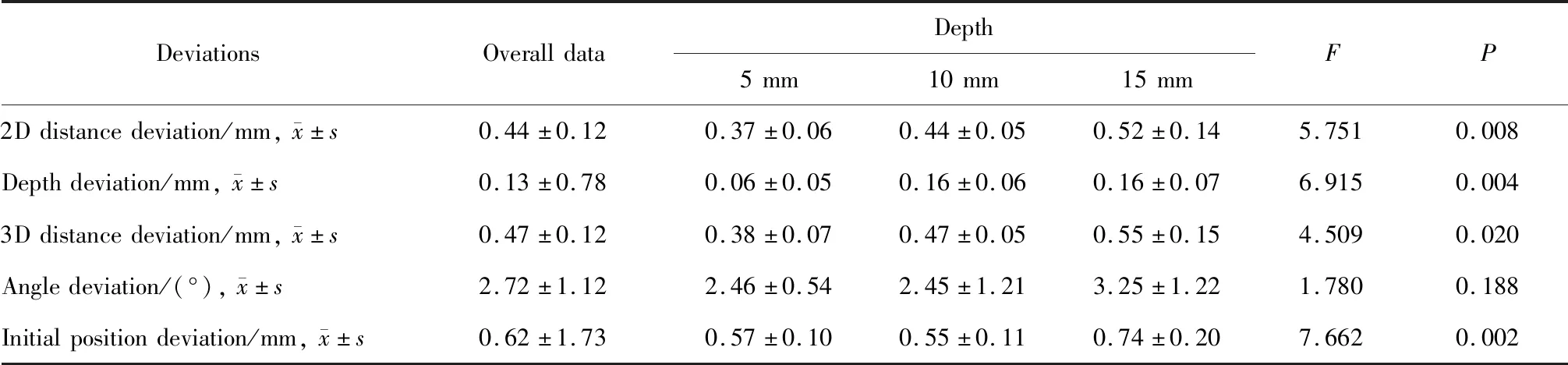
表1 不同进入深度下导航终点的位置偏差与角度偏差Table 1 Position deviation and angle deviations of navigation end position at different entry depths

表2 不同进入深度下导航终点位置偏差的LSD事后检验Table 2 LSD post test of navigation end position deviations at different entry depths
3 讨论
动态导航技术作为一项新型的数字化技术,基本原理是利用追踪器对手术器械及患者实时定位。对于本实验中使用的迪凯尔公司导航系统,有相关研究表明其定位精度可达到(1.48±0.65) mm,角度精度可达到3.71°±1.32°[9],与动态导航下的种植精度相当[10]。一项meta分析表明,Navident、X-Guide、AqNavi、ImplaNav、IRIS这5种国外导航系统之间并没有精度差别[10],也就是说,不同导航系统之间存在的差别主要集中在导航软件的设计和操作器械的外形上,不同导航系统之间的核心系统并无根本性差别。本实验通过对迪凯尔公司导航系统的精度研究,可以在一定程度上反映目前动态导航精度的整体水平。
目前,不同研究报道的动态导航精确度的差异较大,这可能是由于尽管导航系统之间并无根本性差异,但不同体外研究中使用的牙齿及颌骨却存在很大的解剖差异,例如,同样是利用动态导航技术定位根管,Zubizarreta-Macho等[6]使用动态导航技术的定位最低偏差值为0.94 mm,而Gambarini等[11]的研究中动态导航技术的定位偏差仅有0.34 mm。在上述这两项研究中,研究人员使用了相同的动态导航软件Navident DNS系统,但使用的离体牙/模型牙的解剖差异却很大。Zubizarreta-Macho等[6]使用的是前牙离体牙并从患牙的切端开髓,这个过程中钻针的定位难度很高,缺少固定的支撑面会导致钻针的入路难以稳定;Gambarini等[11]是在下磨牙牙合面上完成开髓操作,这个过程中钻针放置于后牙较为平坦的牙合面上,操作难度相对较低,也更容易稳定钻针、完成入路,因此定位根管的偏差也更小。
种植领域中针对动态导航技术精确度的研究更广泛,不同研究报道的动态导航精度变化也很大,在种植目标位点,定位偏差较高的达到了1.83 mm[12],偏差较低的仅有1.18 mm[13],角度偏差较高的达到了6.46°[14],较低的仅有2.97°[5]。对动态导航种植精度的回顾性研究表明,导航下种植的平均定位偏差为1.21 mm,平均角度偏差为2.78°[10],这些导航下进行的种植操作中,不同研究使用的模型或者尸体颌骨各不相同,种植环境不同会对导航的定位精度产生影响。
在种植及牙髓领域中,针对动态导航技术的精度研究中另一个常被忽视的因素是导航系统进入的深度,放置不同植入体、开髓路径及根尖定位进入的深度各不相同。根尖手术的体外模型研究结果表明,以进入5 mm深度为界,动态导航下进入的深度越深,对根尖定位的距离偏差也越大,而导航下定位的角度偏差则并未随着深度的增加而增大[7]。目前针对导航下定位精度随深度变化的研究还比较少,且缺乏系统性研究。
基于上述问题,本实验设计了一个标准模型块用于导航系统精度的验证。模型表面为便于放置钻针的平面,内部空腔为尺寸确定的半球体,在5、10、15 mm三个深度上设计了半球空腔,可以对不同深度下动态导航的定位精度变化进行研究。目前的体外临床研究中,树脂是一种被广泛应用的材料。在CBCT显影下,本实验使用的veroclear树脂材料与空腔中的空气有着良好的X线阻射性差异,可以在动态导航软件中清楚地分辨出模型与空腔的边界。以往有研究曾在体外根尖手术中使用与该树脂材料理化性能接近的Verowhite树脂打印的颌骨及牙齿模型[15],也有研究曾在根管预备及切削中使用相似树脂材料打印的模型牙[16]。此外,使用树脂模型的一个优点是树脂是一种均值化的标准材料,其结构与骨组织不同,内部不存在孔隙。本实验中的标准模型可以排除不同解剖结构、材料特性及操作环境对导航系统定位精度造成的干扰。
本实验中使用的环钻可以一步完成去骨开窗与骨去除,相比于传统裂钻,是目前根尖手术及种植领域中高效、便捷的方式[17],且精度不低于传统裂钻[18-19]。根尖手术中,环钻可以制造小且有针对性的骨窗[20]。有研究表明,直径为4.4 mm大小的环钻,对不同大小的根尖病变,不同牙位、不同直径的牙根都有较好的适应性,在控制了去骨损伤的前提下,保证了术野的清晰及足够的空间以容纳手术显微口镜,可在手术显微口镜下观察整个根端[15]。种植领域中,直径4.5 mm的去骨环钻也是常用的尺寸[21]。此外,在种植导航软件中需要借助种植体设计引导入路,而环钻的形态可以与软件中的种植体形态较好地匹配。综合考虑,本实验采用了直径4.5 mm的环钻作为入路钻针,研究导航下环钻定位的精确度对于未来导航下的种植与根尖手术操作有直接的指导意义。
本实验中动态导航定位的偏差与以往的研究结果相比,在进入深度15 mm的范围内都保持了很高的精确度。有回顾性研究报道,动态导航下定位平均偏差为1.21 mm[10],本实验中,在进入15 mm的深度下,三维距离偏差为(0.55±0.15) mm,这是由于在实验过程中人为限定了动态导航软件的二维偏差及角度偏差允许值为一个较小的值,最终实现了高精度的动态导航。由于目前尚未见专门针对牙髓治疗领域的动态导航技术,无论术者想要进行何种操作,都需要借助种植动态导航软件完成[22],而种植系统中对于二维偏差、角度偏差的允许值往往较大,如本实验中使用的迪凯尔公司导航系统,其默认的二维偏差允许值为1 mm,角度偏差允许值为8°。对于目标是切除根尖3 mm或是精确定位阻塞根管的牙髓治疗来说,这个偏差值过大,但降低允许值的范围也提高了操作的难度。本研究也尝试过进一步降低允许值范围,但由于人手操作的不可控性,更低的允许值下无法完成操作,因此选择了0.3 mm作为最大允许值。目前尚未见针对导航系统中二维偏差、角度偏差的允许值大小对导航精度结果影响的研究,这是未来一个可能的研究方向。
此外,本研究虽然设定了0.3 mm为最大允许值范围,但导航定位的偏差值均大于0.3 mm。这种误差出自两方面,其一在于慢速弯机上安装的车针在钻入模型的过程中会产生抖动,对结果产生影响;其二在于动态导航对操作的引导具有滞后性。在偏差超过允许值范围时,需要术者捕捉到变化信息并停止操作,而在停止操作前的过程中,钻针的方向与位置偏差都在允许值范围外。两个系统误差的共同结果造成了实际钻入的误差范围大于设定的允许值范围。
在5、10、15 mm逐渐增加深度的定位过程中,动态导航的二维位置偏差、三维位置偏差和深度偏差都有随深度增加而增大的趋势;相反,对于0 mm深度的初始位置偏差以及被模型空腔限制住的角度偏差,则未显示出随深度增加而增大的趋势。我们采用LSD事后检验法对具有增大趋势的3项数据进行两两组间比较,发现5 mm深度组与10 mm深度组相比,在二维、三维位置偏差及深度偏差上差异无统计学意义,10 mm深度组与15 mm深度组相比也是同样的结果。仅5 mm组与15 mm组的差异有统计学意义,说明导航技术在深度增加的过程中定位偏差的增加并不大。
综上所述,动态导航技术作为一种新兴的数字化技术,在空间位置的定位及角度控制上具有良好的精确度。本实验对今后种植及牙髓治疗领域中动态导航技术的进一步应用提供了参考和方向。
猜你喜欢
现代医药卫生(2022年20期)2022-11-20
颈腰痛杂志(2022年3期)2022-10-17
中国药学药品知识仓库(2022年10期)2022-05-29
中国典型病例大全(2022年9期)2022-04-19
中国药学药品知识仓库(2021年18期)2021-02-28
新教育时代·教师版(2017年30期)2017-09-12
小学教学研究(2017年1期)2017-01-19
中学生数理化·七年级数学人教版(2008年8期)2008-10-15
