无人机机载干涉阵列外场试验平台
2022-04-13 03:23胡雅斯邓丽朱尧
空间科学学报 2022年2期
胡雅斯 邓丽 朱尧,2
1(中国科学院国家空间科学中心 复杂航天系统电子信息技术重点实验室 北京 100190)
2(中国科学院大学 北京 100049)
0 引言
由多架无人机组成的无人机集群可以协同完成复杂任务[1]。通过单机之间的紧密协作,可以展现智能无人机集群性能的优越性,因此国际上开展了广泛的智能无人机集群研究。美国国防高级研究局(DARPA)和海军研究实验室(NRL)等机构开展了无人机集群最新技术研究。目前典型的无人机集群技术项目包括:小精灵(Gremlins),拒止环境中协同作战(CODE),山鹑(Perdix)微型无人机,低成本无人机集群技术(LOCUST)等[2]。
中国的无人机技术起步较晚,但是发展迅速。2017年10月中国电子科技集团公司完成119 架固定翼无人机集群飞行试验,演示了编队起飞、自主集群飞行、分布式广域监视、感知与规避等智能无人机集群技术[3]。中国对微型旋翼无人机的研究主要针对的是飞行控制算法和计算机仿真。国防科技大学提出了微型旋翼无人机自主控制的关键技术,通过对旋翼无人机动力学模型和非线性控制算法进行研究,设计了自抗扰控制器和姿态控制器,仿真验证了控制器效果;南京航空航天大学研究了无人机在悬停和低速飞行状态下的飞行姿态稳定和相关惯性导航技术;2013年在国际空中机器人大赛中,清华大学THRONE代表队的无人机仅用8 min 就完成了寻找和抓取U 盘的挑战任务[4-6]。
多旋翼的操控较为简单,不需要跑道即可垂直起降,起飞后可在空中悬停。多旋翼没有活动部件,其可靠性主要取决于无刷电机,可靠性较高。由于旋翼无人机重量轻、体积小、定位精度高、成本相对较低,在目标获取、识别、遥感、测绘和救援等领域有越来越多的应用。因此可以采用无人机作为搭载平台,搭建一套外场试验平台,作为测试基准,模拟卫星运动状态和运动过程中卫星之间的相对位置关系,开展地面 相对测量测试以及空间科学试验[7-9]。
1 外场试验平台
1.1 需求描述
超长波射电观测是目前直接观测研究宇宙黑暗时代的唯一手段。由于超长波经过地球大气电离层时会产生强烈的折射和吸收,且地球上还有大量人工及自然产生的该频段电磁辐射,导致近地空间电磁环境被严重污染。月球背面可以有效屏蔽来自地球的电磁干扰,为超长波天文观测提供了最佳环境[10]。
超长波波段的电波波长为几米到几百米,而卫星上能够安装的接收天线尺寸有限,方向性不灵活,单靠一个天线难以精确测量超长波的辐射方向。若想在超长波波段实现对宇宙射电信号的高分辨率成像,通常需要天线口径达到波长的数百倍乃至数千倍以上,因此传统的单天线方法不再适用。如果有多个天线接收信号,可以根据不同天线信号的干涉测量得到其获取信号的时间差,从而精确分辨不同方向传来的电波强度。空间分布式被动微波干涉成像技术是实现超长波波段宇宙射电信号高分辨率成像的有效方法,其主要思想是利用分布式卫星星座在深空实现超长干涉测量基线,以替代大口径天线,实现对宇宙射电源的高分辨率成像[11]。
经过调研,目前还没有支持分布式干涉测量技术验证的试验平台。一方面,由于以往都是地基或单机试验系统,无法模拟卫星运动状态和运动过程中卫星之间的相对位置关系;另一方面,地面试验会产生多径效应[12],对星间时钟同步及测距系统产生很大干扰。因此构建无人机机载干涉试验平台,开展机载相对测量测试以及科学试验是非常有必要的。
超长波天文观测阵列(DSL)计划利用多颗微卫星环绕月球编队飞行,其中有一颗主星和若干子星,每颗子星上装有接收机,将收到的信号发给主星。主星负责测量每颗子星的相对位置,并对收到的信号数据进行处理,将结果保存在主星上。当各星都在月球背面使得地球干扰被遮蔽时,开机进行观测,而当绕到月球正面时则由主星向地球下传观测数据。主星与多颗子星在绕月圆轨道线性编队飞行,形成空间分布式干涉阵列,利用编队协同观测和轨道演化带来的基 线变化,实现对宇宙黑暗时代的空间探测。
1.2 平台指标
RTK(Real Time Kinematic)是实时动态测量技术,该试验平台以大疆无人机M600 Pro(含D-RTK GNSS 模块)为搭载平台[13,14],根据卫星高度、运动速度和基线范围等参数信息,设置无人机的相关参数,平台性能指标的对比列于表1。
根据表1 中的指标参数,该机载试验平台定位精度 理想状态可达cm 级,同时姿态指向精度也满足需求。
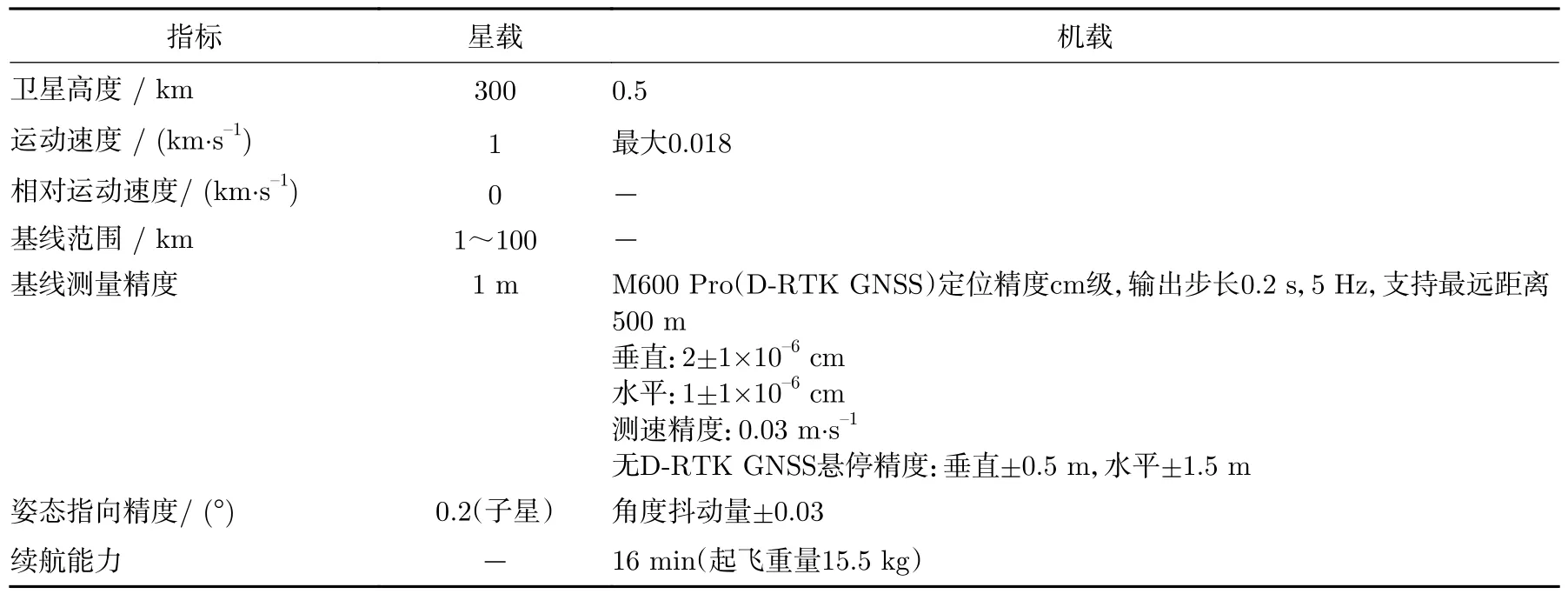
表1 试验平台性能指标Table 1 Performance indicators for test platform
1.3 平台能力
采用M600 Pro 无人机的机载试验平台初步具备如下能力。
(1) 飞行能力。无人机起飞海拔最高为2500 m,一般相对起飞地面可以上下浮动500 m,即飞行海拔最高能到3000 m。通信的信道中,电波传播除了直射波和地面反射波之外,在传播过程中还会受到各种障碍物引起的散射波影响,使接收信号的极化方式、相位、多普勒频移发生变化,产生定位偏差甚至信号失锁,从而形成多径效应[15]。通常300 m 高度以上多径效应大大减弱。
(2) 定位精度能力。实时动态测量技术(RTK)是以载波相位观测为根据的实时差分GPS(RTDGPS)技术,由基准站接收机、数据链、流动站接收机三部分组成[8]。在基准站上安置1 台接收机作为参考站,对卫星进行连续观测,并将其观测数据和测站信息通过无线电传输设备实时发送至流动站,流动站GPS接收机在接收GPS 卫星信号的同时,通过无线接收设备,接收基准站传输的数据,然后根据相对定位的原理,实时解算流动站的三维坐标及其精度(即基准站和流动站坐标差 ∆x、∆y、∆H,加上基准坐标得到的每个点WGS-84 坐标,通过坐标转换得出流动站每个点的平面坐标x、y和海拔高度H)[16]。D-RTK GNSS 通过实时动态差分技术将三维定位精度由m级提升至cm 级,集成了定位、定高和测向功能,是高精度导航定位系统。DJI D-RTK 采用GPS+Beidou或者GPS+GLONASS 双模四频RTK 接收机及算法,通过使用D-RTK,飞行平台的水平和垂直定位精度均可达到cm 级。
(3) 姿态能力。定向精度为0.2°R–1,这里R为天空端两根天线之间的距离,单位m。最大旋转角速度:俯仰轴300(°)·s–1,航向轴150(°)·s–1。姿态稳定度:控制精度1°。姿态指向精度角度:抖动量±1°。绕飞时无人机可以实时指向绕飞中心点,由于无人机上安装有天线,天线对准角度在3°以内。姿态能力满足要求。
(4) 飞行控制能力。M600 Pro 搭载专业级A3 Pro 飞行控制系统,配备三套IMU 和GNSS 模块,配合软件解析余度实现6 路冗余导航系统。模块安装进行避震设计处理,数据更为精确,保障稳定可靠的飞行表现和精准操控。内置飞行参数自适应的功能可实现不同负载下参数均免调,便捷易用。
(5) 承载能力。M600 Pro 承载高达5.5 kg。可根据试验需要搭载有效载荷电子学设备。
(6) 可扩展能力。为了完成搭载试验,平台还需要能支持多机编队,支持无人机位置姿态数据传输和存储等。DJI M600 Pro 支持Onboard SDK 和Mobile S DK[17]二次开发,因此需进一步进行平台软件开发。
2 平台开发
为实现多机编队控制和实时数据传输,需要开发两个软件,即无人机编队飞控软件和机载端的实时数据传输软件。飞控软件以手持端Mobile 的形式连接无人机遥控器,主要功能是飞行轨迹设计、无人机编队控制、飞行状态的监视显示以及相关飞行位置姿态数据的存储。实时数据传输软件以机载板的形式嵌入无人机,主要功能是在飞行过程中实时向电子学设备传输无人机位置和姿态数据,可用于开展时钟同步等试验[6]。
为了支持多机协同编队,软件开发主要涉及编队控 制和数据接口两方面。
2.1 编队控制
编队控制主要是对多台无人机进行集中控制,保证多个无人机形成期望的编队,完成指定任务。根据任务类型不同,编队形式主要分为两类:线性编队和圆形绕飞编队。无人机编队飞行控制软件架构如图1 所示。无人机编队飞行控制软件分为PC 端和Mobile 端。PC 端主要负责编队飞行控制,向Mobile端发送飞行任务指令。Mobile 端负责与无人机进行交互,控制无人机飞行,并将数据传输给PC 端。
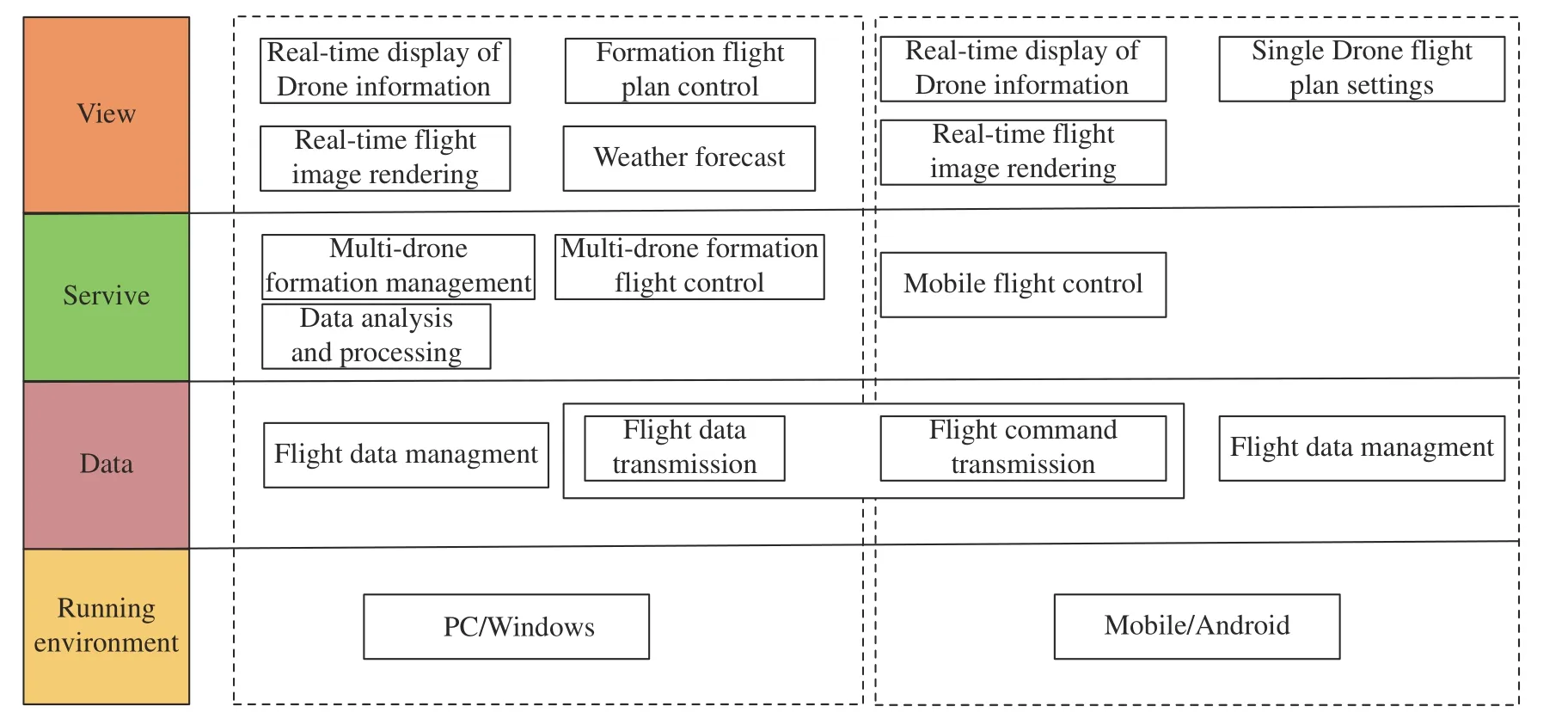
图1 多机编队飞行软件架构Fig.1 Software architecture for Drones’ formation flight control
表现层构建了用户界面,用于呈现无人机编队飞行控制及数据处理软件的使用界面,主要负责无人机编队参数设置、无人机信息实时显示、实时飞行图像绘制、数据可视化功能。
业务层是负责表现层的页面数据以及调用下面几层的服务,其他包含了多机编队管理、多机编队飞行控制、单机飞行控制、数据分析处理功能,其中PC 端负责多机编队部分,Mobile 端负责单机飞行控制部分。业务层与数据文件的交互和PC 端与Mobile端之间的通信是通过下面的数据层进行的。
数据层主要内容是PC 端与Mobile 端之间的数据传输及试验飞行数据的管理,在飞行试验中实现PC 端与Mobile 端之间的通信和控制,并在操作系统中读取或保存飞行数据文件。在运行时需要在Windows 和Android 系统中同时启动PC 端和Mobile端程序,目前该软件运行稳定。多机编队控制流程如图2 所示。

图2 编队控制流程Fig.2 Flow chart for formation control
服务端部署在PC 上,以网站形式显示,首先将任务参数写入一个XML 文件中,服务端从本地读取该任务文件,并将文件解析为任务参数,利用web socket 将任务参数同时发送给三个Mobile 端,Mobile端和遥控器用USB 线连接,Mobile 端收到任务后,同时给对应的无人机遥控器发送指令,遥控器接着发信号给无人机,控制无人机开始执行编队任务,实现三机同步编队。根据试验需求,可支持线性编队和圆形绕 飞编队。
2.2 数据接口
机载端需获取无人机的时间、位置、姿态数据,并实时发送给电子学设备,用于设备开展时钟同步。
发送数据接口要求为LVTTL 接口。数据传输格式为:包头+包计数(16 位)+具体数据。具体数据包括:时间(单位s),速度(单位m·s–1),角速度(单位(°)·s–1),GPS 经纬高度,GPS 位置(x,y,z),姿态角四元数,RTK 经纬高度,RTK 位置(x,y,z)。通信协议中 奇校验,1 位停止位。另外,波特率为115200 bit·s–1。
2.3 平台扩展能力
该试验平台可支持多个无人机搭载平台的协同编队,现以3 个无人机(Drone 1、Drone 2、Drone 3)为 例进行说明,其具备如下能力。
2.3.1 编队能力
通过Mobile SDK(Software Development Kit)二次开发,平台支持两种编队方式:线性编队和圆形编队。以3 个无人机的编队为例,具体描述如下。
(1)线性编队。三个无人机在同一个飞行高度(例如300 m),Drone 1、Drone 2、Drone 3 形成一条直线,如图3 所示。
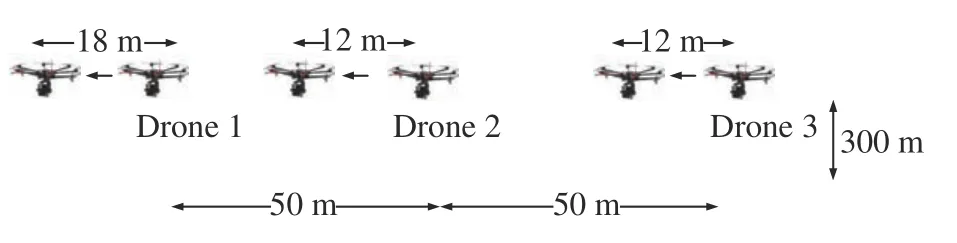
图3 线性编队的飞行几何Fig.3 Flight geometry of linear formation
(2)圆形编队。中间无人机悬停,另外两个在同一平面绕中间无人机做同心圆绕飞,如图4 所示。Drone 1 为中心悬停,Drone 2、Drone 3 以同样的角速度绕Drone 1 做圆形飞行。绕飞的无人机Drone 2、Drone 3 姿态实时指向中心无人机Drone 1,原理类似于卫星姿态中的对物稳定。三个无人机同时绕飞,并且Drone 1、Drone 3 和Drone 2 位于不同的高度,如图5 所示。
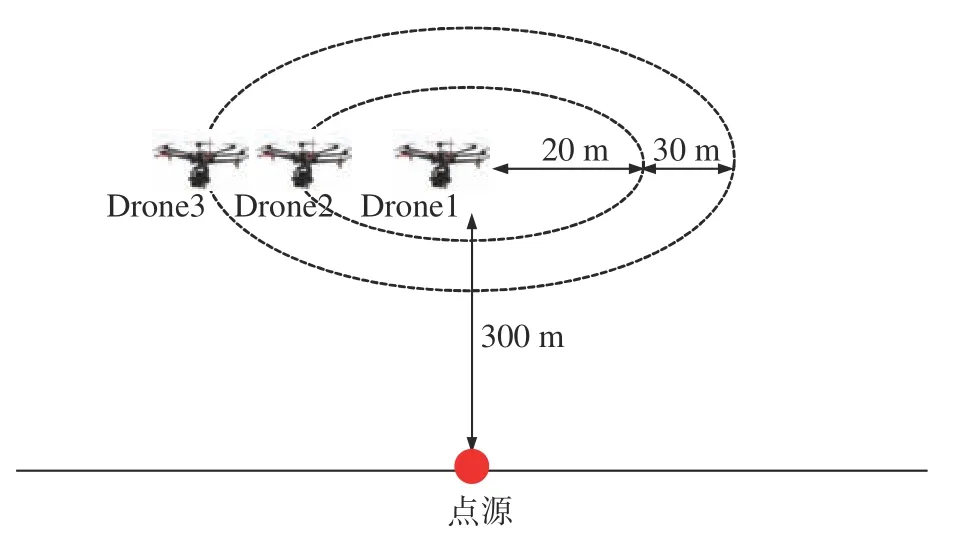
图4 圆形编队1 的飞行几何Fig.4 Flight geometry of circular formation 1
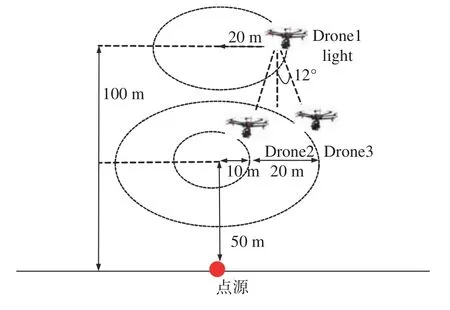
图5 圆形编队2 的飞行几何Fig.5 Flight geometry of circular formation 2
2.3.2 数据存储和传输能力
M600 Pro 承载质量达到5.5 kg。通过 Onboard SDK 二次开发可以将获取的无人机姿态及定位数据实时传输给搭载的有效载荷电子学设备,并保存在本地存储设备中。同时提供灵活的载荷接口、硬件接口,支持无线通信,数据可通过无线WiFi 下传。
综上所述,尽管卫星运动速度(1 km·s–1)比无人机飞行速度(18 m·s–1)快,但是采用无人机可以模拟卫星的运动特性。无人机姿控系统与卫星姿控原理一致,配置陀螺仪进行姿态稳定,机载平台的控制精度与卫星平台基本一致。无人机定位精度为cm 级。
基于该试验平台的定位精度和动态特性,该平台可应用于DSL 的试验验证,拟采用多个无人机搭载有效载荷电子学设备,模拟多星编队飞行,形成不同尺度的干涉基线,通过制定合理的系统地面试验方案,以等效验证的方式对系统关键指标进行验证。通过开展干涉阵列外场试验,验证技术指标,促进方案优化。该平台可测试分布式系统被动微波成像的相关能力,包括有效载荷设备的通信测距、测角、时间同 步能力以及有效载荷设备的干涉测量和定标能力。
3 试验案例
3.1 试验方案
通过无人机编队飞行,模拟多星探测系统,形成不同尺度的干涉基线。根据试验需求,针对现有的三个无人机搭载平台,开展三机圆形编队绕飞,具体试验方案如下:Drone 1、Drone 2、Drone 3 在100 m 高度以(116.8990753°,40.3543671°)坐标点为圆心,保持2(°)·s–1的角速度,分别以100 m、60 m、30 m 为半 径同时进行圆形绕飞。
3.2 数据分析
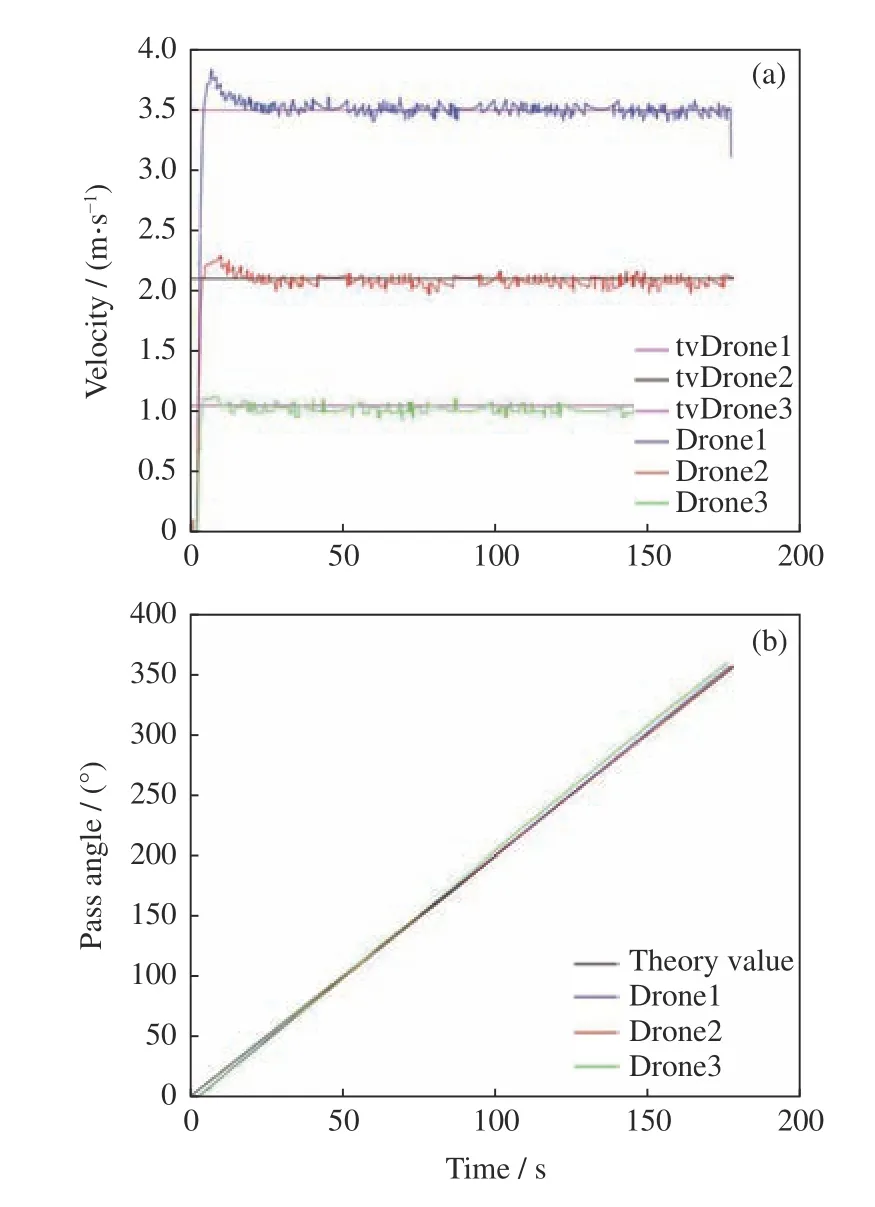
图9 Drone 1~3 无人机绕飞的速度(a)及已绕飞角度(b)Fig.9 Diagram for the velocity (a) and passed angle (b) of Drone 1~3
针对以上试验方案,开展外场飞行试验,该次飞行没有使用RTK,飞行过程如图6 所示。图6 中由外向内依次为Drone 1、Drone 2、Drone 3 的飞行轨迹。飞控软件PC 端获取了三个无人机的飞行数据,经分析,绕飞时段三个无人机经纬度数据如图7 所示。Drone 1、Drone 2、Drone 3 的高度、半径、速度、角度、姿态角如图8~10 所示。针对Drone 1、Drone 2、Drone 3 的数据,统计绕飞时段三个无人机的高度、绕飞半径、角度以及俯仰、偏航、横滚三个姿态角的误差(见表2)。针对Drone 1、Drone 2、Drone 3的数据,统计绕飞时段三个无人机的高度、绕飞半径、角度以及俯仰、偏航、横滚三个姿态角的误差(见表2)。
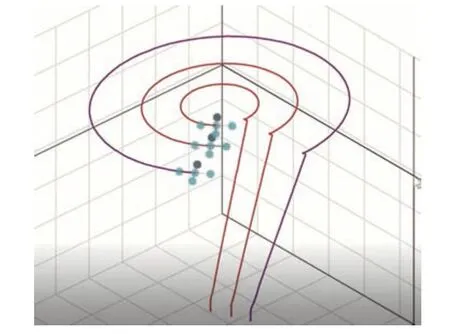
图6 Drone 1~3 无人机飞行轨迹Fig.6 Diagram for the flight path of Drone 1~3
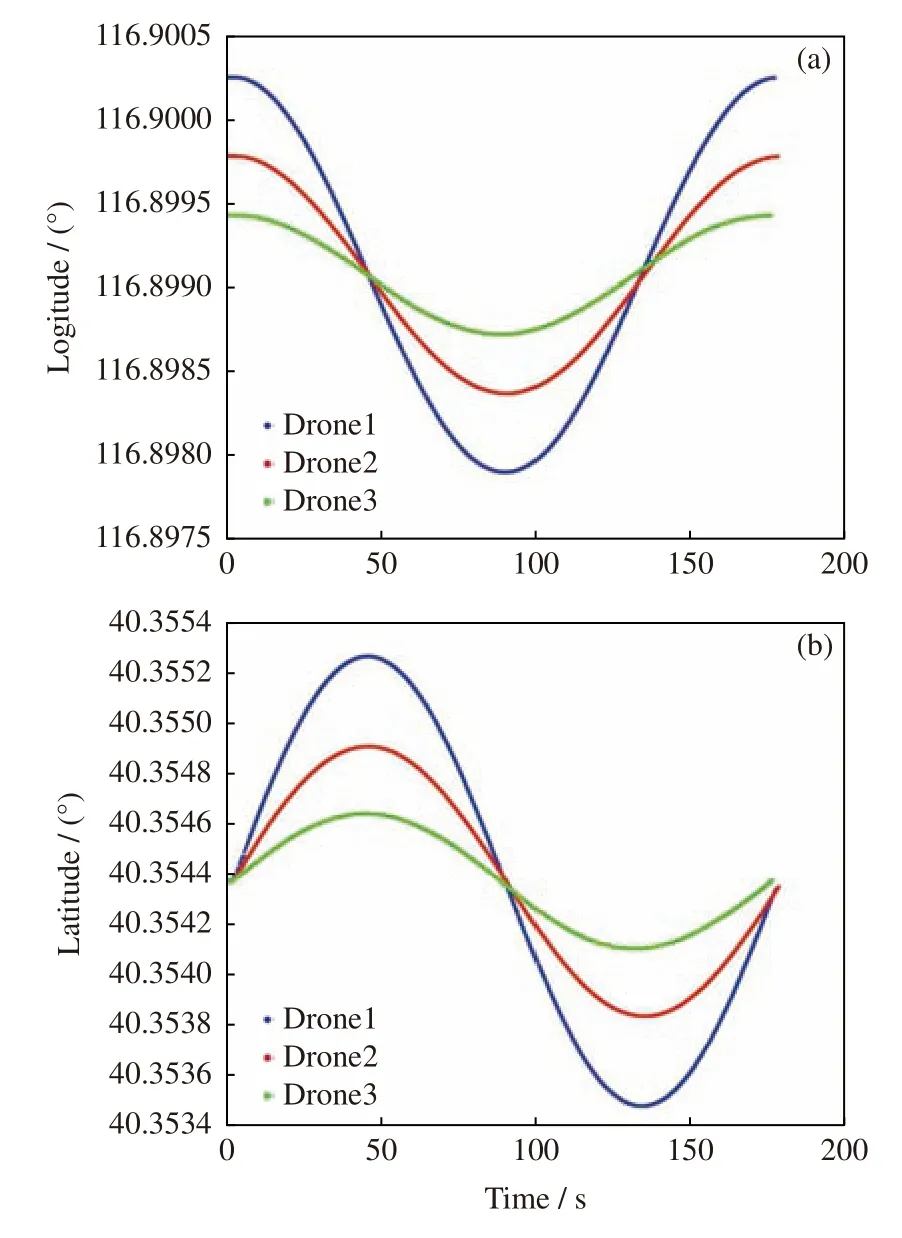
图7 Drone 1~3 无人机的经度(a)和纬度(b)Fig.7 Diagram for the longitude (a) and latitude (b) of Drone 1~3
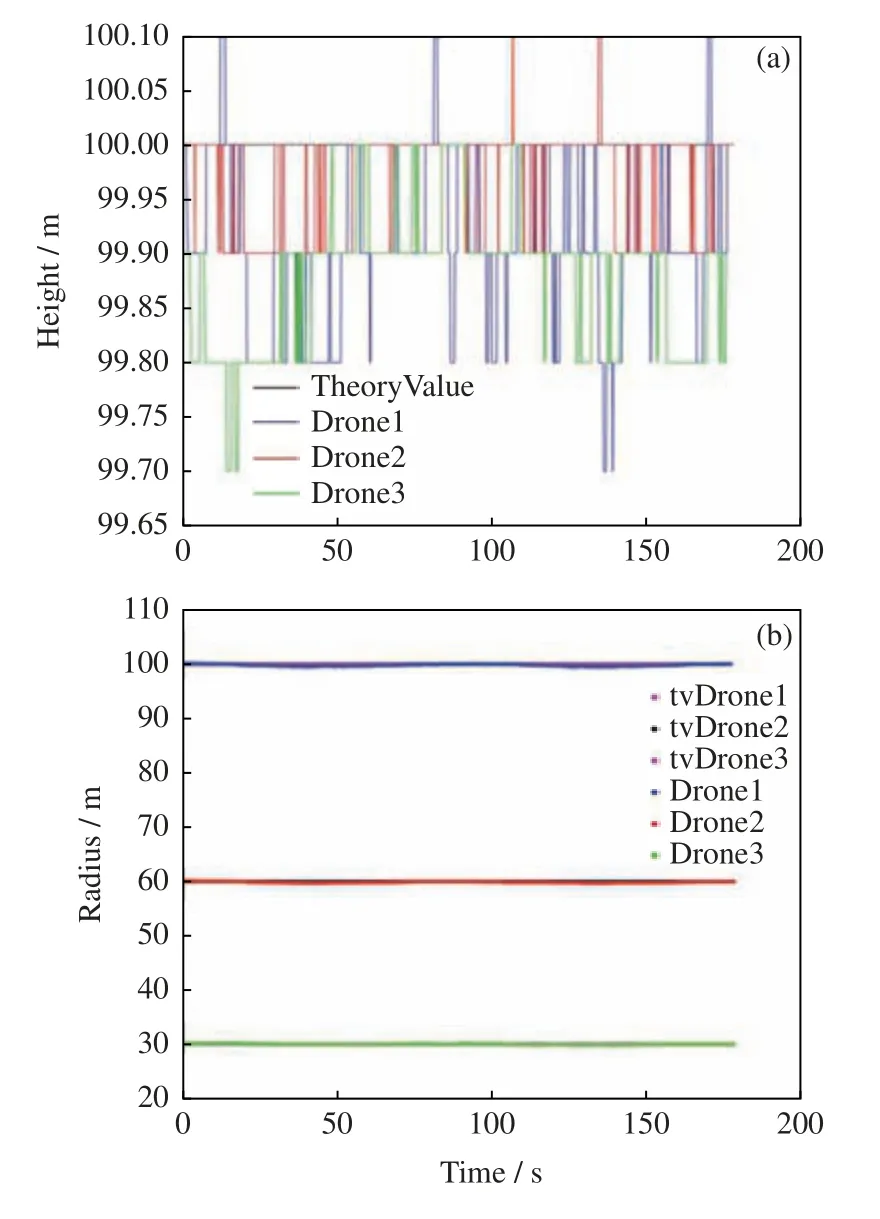
图8 Drone 1~3 无人机绕飞的高度(a)及半径(b)Fig.8 Diagram for the height (a) and radius (b) of Drone 1~3
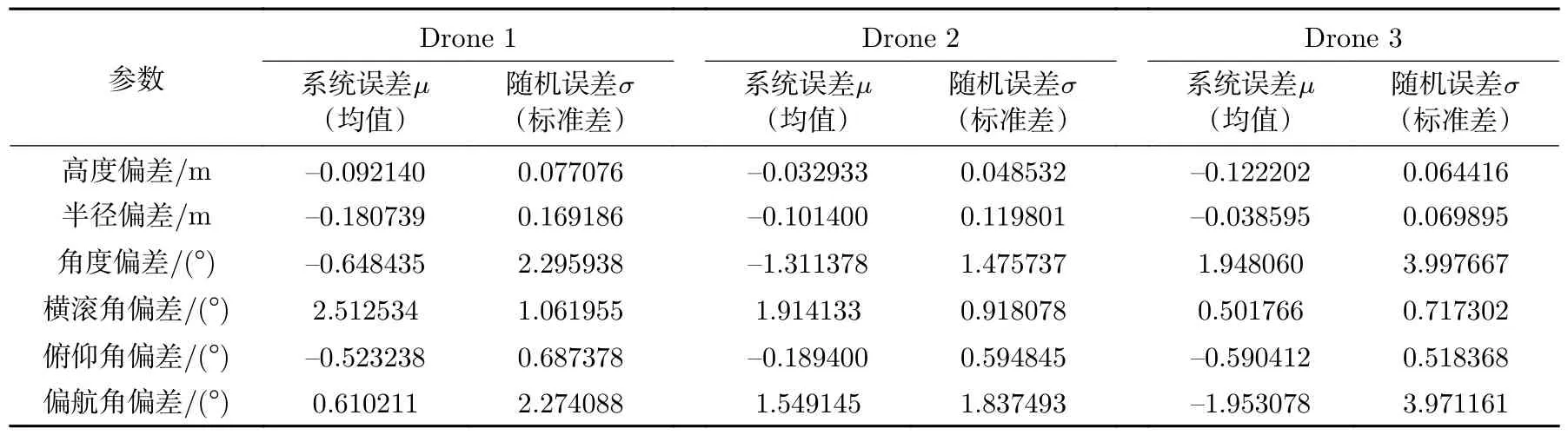
表2 Drone 1~3 无人机的误差统计Table 2 Statistics of parameter errors of Drone 1~3
定义角度ai为某时刻无人机、中心点、飞行起始点三个点的夹角;ei(a)为某时刻i对应的角度误差,有ei(a)=ai −ωt;eyaw,i为某时刻偏航角误差,eyaw,i=ayaw,i −ωt,其中,ω为无人机绕飞角速度,t为经过的时间,ayaw,i为某时刻无人机实测偏航角。记xi为某个时刻的误差,xi=xreal−xtheory。Μ为系统误差,是xi的平均值;Ν为数据个数。σ为随机误差,
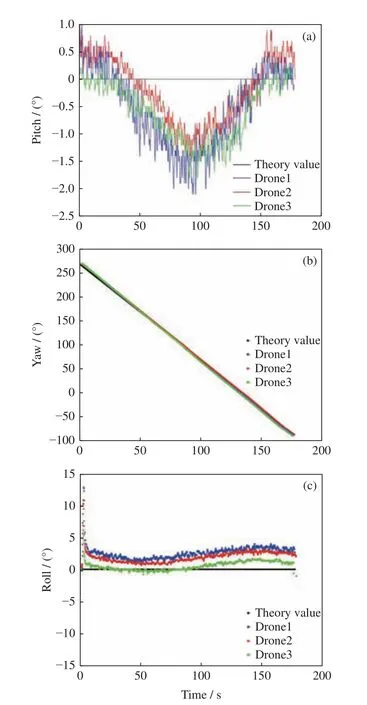
图10 Drone 1~3 无人机绕飞的俯仰、偏航和横滚角度Fig.10 Diagram for pitch,yaw,and roll angles of Drone 1~3
该次飞行未使用RTK,使用的是GPS。根据试验飞行数据统计,实际飞行中,无人机高度偏差为cm 级,半径偏差为dm 级;角度随机误差Drone 3 最大,为3.9°,Drone 1 最小,为–0.6°。Drone 3 的俯仰角和横滚角均小于0.7°,理论上定位精度能达到c m 级,但实际飞行中稍有偏差。
4 结论
为了对超长波天文观测阵列的技术方案实现进一步优化,卫星在轨部署前需开展充分的地面试验,对空间分布式干涉测量系统的各项关键技术进行验证。本文搭建了无人机机载干涉阵列外场试验平台,其具有如下优点:平台距离地面飞行高度高达500 m,能够有效解决地面试验中通信测距系统的多径效应;支持多个无人机编队与控制;使用差分技术定位精度可达cm 级;观测数据可通过机载板实时传输。该平台通过无人机搭载有效载荷设备,模拟卫星绕月编队飞行,形成不同尺度的干涉基线,可在DSL 项目中开展测距测角等原理性试验,包括有效载荷设备的通信测距、测角、时间同步试验以及有效载荷设备的干涉测量试验等。
此外,该平台可推广用于其他分布式无人机机载试验,经济可行,有很好的应用前景。
猜你喜欢
学生天地(2020年3期)2020-08-25
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
北京航空航天大学学报(2017年3期)2017-11-23
雷达学报(2017年1期)2017-05-17
北京航空航天大学学报(2017年10期)2017-04-20
海军航空大学学报(2015年4期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31