带有长电缆的永磁同步电机无传感器速度控制
2022-04-13 05:13李练兵王佳李铎何桂欣张金龙孙坤
电机与控制学报 2022年3期
李练兵, 王佳, 李铎, 何桂欣, 张金龙, 孙坤
(河北工业大学 人工智能与数据科学学院,天津 300130)
0 引 言
潜油电动泵需要拖拽动力电缆在500~2 000 m的井下工作,常工作在低速、高扭矩的工况下。目前异步电动机在电潜泵中得到了广泛的应用,但其效率和功率因数都比较低,耗电量较大,导致石油开采的成本较高。如果将潜油泵使用的异步电机改型为永磁同步电机(permanent magnet synchronous motor,PMSM),则电机的转子由永磁体励磁,它既没有电励磁电机的励磁损耗,也没有异步电动机由于转差引起的损耗,从而可以大幅度地提高电机的效率和功率因数,对于昼夜连续运转的油井电机显得尤为可取,将其用于油田采油设备,可以大大减少能源消耗,同时降低采油的成本。
通常,PMSM的运行需要安装位置传感器来获取转子位置,然而添加位置传感器不仅增加了电机整体的成本而且也使得电机结构更加复杂,同时降低了电机运行的可靠性[1-2]。由于位于井下500~2 000 m的PMSM潜油电动泵工作环境复杂、电磁干扰严重,也不适合给PMSM加位置传感器。近年来,大量的学者致力于推进PMSM无传感器控制研究并取得了很大的进展,无传感器控制方法主要分为两种:反电动势法和旋转高频电压信号注入法。反电动势法是结合PMSM电压模型和反电动势来估算出转子位置,在中高速区域显示出了良好的控制性能[3-5]。旋转高频电压信号注入法需要注入高频电压信号通过磁极凸极性来获取转子位置信息,在低速和零速显示了优良的性能[6-10]。PMSM潜油电动泵工作特点就是低转速大扭矩,因此本文研究适用于带有长动力电缆PMSM高频信号注入的无传感器控制方法。
结合空间矢量调制(space vector pulse width modulation,SVPWM)算法控制绝缘栅双极晶体管(insulated gate bipolar transistor,IGBT)的开通和关断,逆变器输出电压从0到500 V。逆变器通过长动力电缆与电机相连,由于电机的阻抗与动力电缆阻抗匹配问题会在电机端会产生两倍于直流母线电压的过压[11-13]。动力电缆可以由电阻R、电感L、电容C和电导G来模拟[14]。由于电机的阻抗要明显大于动力电缆的特性阻抗,在电机端会产生反射波,反射波又会叠加到入射波上,进而产生过压。电机端过压的振幅取决于电压脉冲的上升时间,上升时间越大电机端的过压幅值越大。对于长动力电缆电机端过压的问题很多学者做了相关的研究,其中最为流行的是采用基于dv/dt的低通滤波器来配合长动力电缆的特性阻抗和增加的电压脉冲的上升时间[15-17]。由于本文为了PMSM能在低速和零速拥有良好的控制性能而采用了高频信号注入的无传感器控制方法。再加上多电平技术在电机驱动领域越来越受到人们的重视,多电平技术与传统的两电平技术相比具有开关损耗小、谐波少、能够提高系统的容量等优点[18-20]。因此,本文采用二极管钳位式的三电平逆变器来驱动带有长动力电缆的PMSM。
1 电机端电压/电流观测器
图1给出了一种由SVPWM技术控制的电压源逆变器(VSI)馈电的三相永磁同步电动机简化原理图。其中VDC为经过整流后的三电平逆变器的直流输入电压,12路PWM开关信号(p1~p12)分别控制12个IGBT功率模块的开通关断,实现逆变输出三相交流电,Da1~Dc2为6个钳位二极管,c1~c2为电容。逆变器输出的电压va、vb、vc通过长电缆连接到星形连接的PMSM绕组。
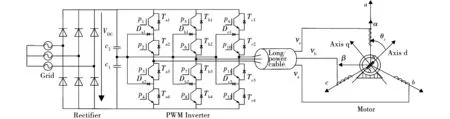
图1 电压源逆变器供电的永磁同步电机
凸极转子机构的PMSM在d-q坐标系中的电压方程为:
(1)
式中:ud为d轴电压;uq为q轴电压;Rs为定子电阻;id为d轴电流;iq为q轴电流;Lq为q轴电感;Ld为d轴电感;ω为电角速度;Ke为反电动势系数。
PMSM机械方程可表示为
(2)
式中:J为电机的转动惯量;Np为极对数;Te为电磁转矩;TL为负载转矩;f为机械阻尼系数。
PMSM电磁方程为
Te=Np[(Ld-Lq)idiq+Keiq]。
(3)
利用方程(1)~(3)可以将电机的d-q轴动态模型表示为:
(4)
式中θ为转子的角位置。
电机模型(4)将用于高频旋转电压注入法和仿真研究。
PMSM在运行过程中可以将长电缆等效为图2所示的电路。
图2中:u(0,t)为三电平逆变器输出的单相电压;i(0,t)为三电平逆变器输出的单相电电流;R、L分别为单位电缆长度的等效电阻和电感;C、G分别为单位电缆长度下的等效电容和电导;u(x,t)和i(x,t)分别为长电缆长度为x、时间为t处的电压和电流;u(l,t)和i(l,t)分别为PMSM端的电压和电流;l为长电缆的长度;dx为长电缆的单位长度。
根据图2所示的长电缆单相等效电路可得,在长电缆长度为x处的瞬时电压和电流为:

图2 长电缆单相等效电路
(5)
假设三电平逆变器输出角频率为ω的正弦波交流电,在长电缆任意长度(x)处的线电压、电流都是角频率为ω的正弦函数,三电平逆变器输出的交流电为:
(6)

将式(6)代入式(5)并化简可得:
(7)
将式(7)化简可得:
(8)
其中:Z0=R0+jωL0为单位长度长电缆的阻抗,Y0=G0+jωC0为单位长度长电缆的导纳。
对于式(8)两边关于x求导可得:
(9)
将等式(8)代入式(9)可得:
(10)

(11)
等式(11)为二阶微分方程,那么其通解可以写成:
(12)
将通解式(12)代入式(8)可得:
(13)
u(0,t)在长电缆的始端即x=0处由等式(12)可知:
(14)
由式(14)计算可得:
(15)
由式(12)~式(15)可得长电缆任意长度x处的电压、电流分别为:
(16)
2 无传感器控制
2.1 驱动控制结构
带有长电缆的PMSM无传感器速度控制机构框图如图3所示,磁场定向控制(field oriented control,FOC)可以实现励磁和转矩的解耦控制。励磁参考电流给定为零即id=0,由等式(3)可知转矩Te只受转矩电流iq控制。速度闭环由比例积分控制器来实现,能够克服不稳定问题。
PMSM的电压、电流的估算由等式(16)来实现,通过测量长电缆始端(三电平逆变器输出端)的电压、电流就可以估算出长电缆终端(PMSM端)的电压和电流。
2.2 旋转高频电压信号注入法
高频旋转电压信号注入法的应用可以避免在永磁同步电机上安装机械传感器,通过准确测量长电缆的电流,就可精确估计出永磁同步电机转子的位置。可采用以下步骤实现高频旋转电压信号注入法:首先,在PMSM的基波激励上叠加一个三相平衡的高频电压激励,然后检测PMSM端对应产生的电流响应,再通过特定的信号处理获得PMSM转子位置。
如图3所示,在坐标变换dq-αβ后面注入频率为ωin、幅值为Vin的高频信号
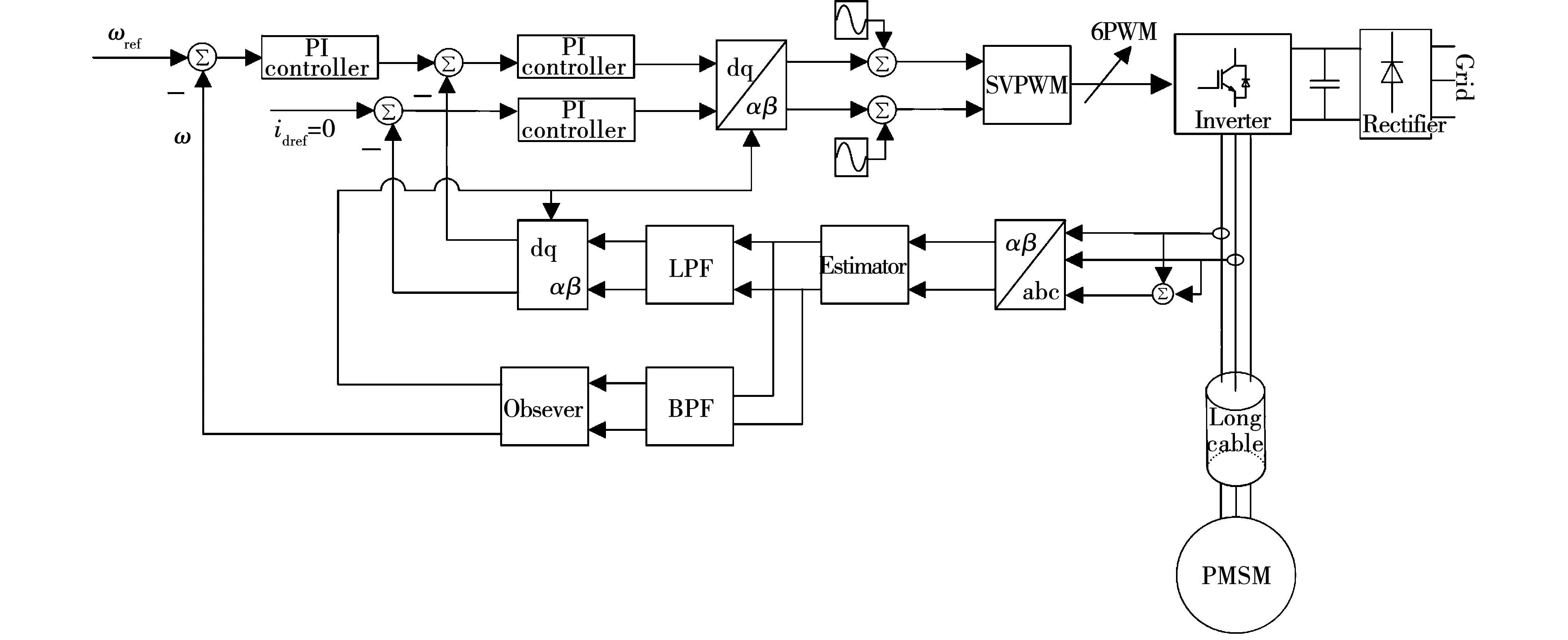
图3 带有长电缆的无传感器速度控制框图
(17)
将高频信号uαβin经过坐标变换αβ-dq变换到旋转坐标系
udqin=uαβine-jθe=Vinej(ωint-θe)。
(18)
一般注入的高频信号uαβin的频率为0.5~2 kHz,远高于PMSM的基波的频率ω,此时,把PMSM看成一个简单的RL电路,又由于在高频时PMSM的电抗要远大于电阻,则在高频激励下将PMSM的电压方程(1)可表示为:
(19)
将等式(18)代入式(19),可以得到高频电压激励下的PMSM电流响应
(20)

(21)
其中:Icp为正相序高频电流分量的幅值;Icn为负相序高频电流分量的幅值。
由等式(21)可以看出,高频电流响应可以分为两部分:一部分是旋转方向与注入电压矢量方向相同的正相序高频电流,其幅值与平均电感有关;另一部分是旋转方向与注入电压矢量方向相反的负相序高频电流分量,其幅值与半差电感有关。另外还可以看出,只有负相序电流分量包含PMSM转子位置信息,因此需要采用特定的方法提取负相序电流分量,进而获得PMSM转子位置信息。
为获取负相序高频电流分量的PMSM转子位置,需要滤除PMSM端电流中的基波电流、PWM开关谐波电流、低次谐波电流以及正相序高频电流分量。通过带通滤波器(band pass filter,BPF)可以滤除基波电流,然后利用同步轴的高频滤波器对正序电流分量进行滤波。
经过以上滤波后,等式(21)只剩下负相序高频电流分量,即
(22)
采用转子位置观测器方法从负相序高频电流分量中提取PMSM转子位置信息,其实现框图如图4所示。
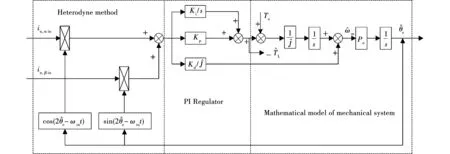
图4 标量形式转子位置跟踪观测器的实现框图
图4中,利用外差法能够实现相角调制以解调出负相序分量,获得与矢量相位误差成正比的跟踪误差信号。经过推导,可以得到跟踪误差信号为
(23)
3 仿真实验验证
整个系统通过MATLAB/Simulink软件进行仿真,系统的采样时间为1×10-6s、仿真时长为0.4 s。三电平逆变器由12个IGBT和4个二极管组成,其直流母线电源由二极管整流器和电容器整流获得。电机模型(4)和长动力电缆图2由SimPowerSystems模块里的器件来模拟。旋转高频电压注入和整个矢量控制系统有MATLAB/Simulink的库中的相关器件搭建。PMSM和长动力电缆的参数分别由表1和表2所示。
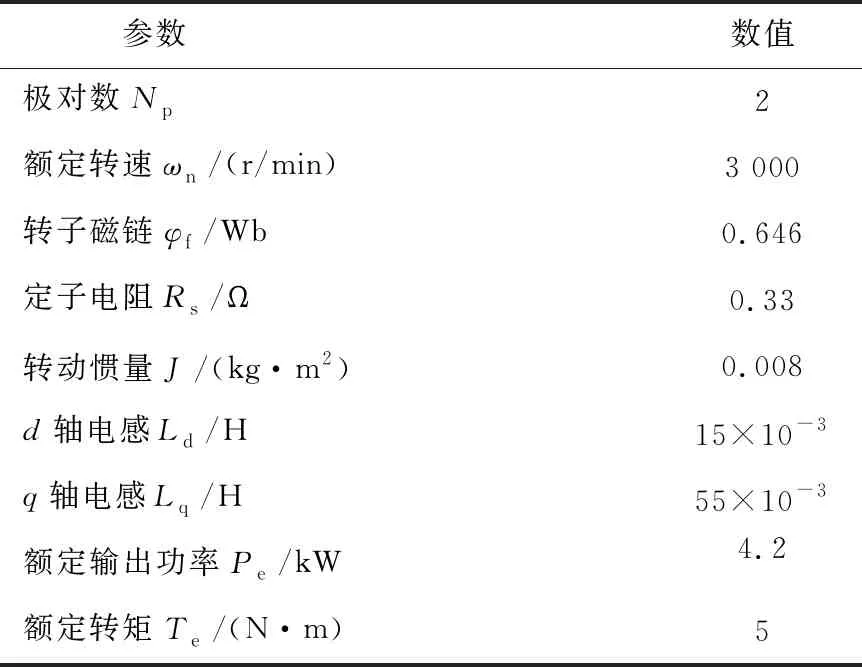
表1 PMSM电机参数
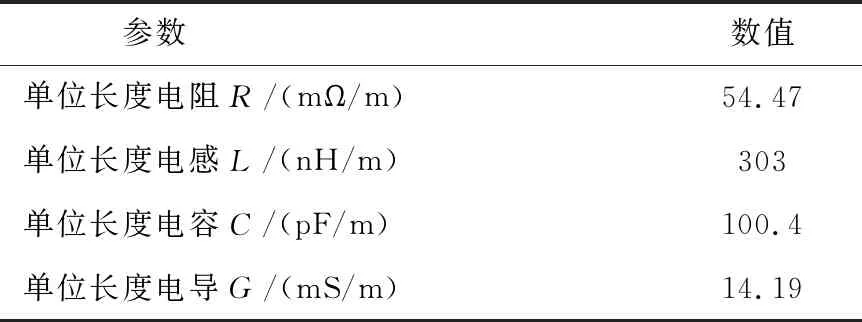
表2 长动力电缆参数
通过注入旋转高频电压获取转子位置从而驱动带有2 000 m动力电缆PMSM,注入的高频电压幅值为45 V、频率为500 Hz。图5所示的是逆变器采用三电平结构、带有2 000 m动力电缆并且采用旋转高频电压注入无传感器控制算法的仿真结果。如图5(a)和图5(b)所示,速度给定在0.2 s时由100 r/min增加到500 r/min,整个仿真过程中检测到的速度和估计的速度都能跟随速度给定。PMSM估计的转子位置和测量的转子位置如图5(c)和5(d)所示,估算得到的转子位置准确性较高。如图5(e)所示PMSM估计转子速度过程中误差都能保持在0.1 r/min以内,能够满足工程需要。在0.2 s的时候(如图5(g)所示)负载从10 N·m增加到36 N·m时,可以看到,交轴电流iq会增加来补偿负载转矩,而电流id一直保持为零(如图5(h)所示)。
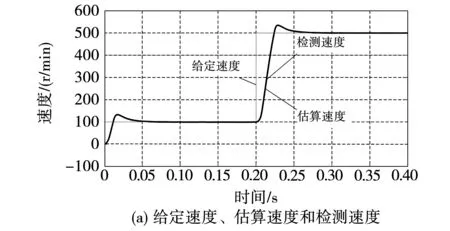
图5 三电平逆变器带有2 000 m动力电缆的无传感器控制仿真结果
图6所示的是逆变器采用两电平结构、带有2 000 m动力电缆并且采用旋转高频电压注入无传感器控制算法的仿真结果。图6(a)、图6(b)和图6(c)所示为两电平逆变器端、电机端和估计电机端的相电压,图6(d)和图6(e)所示的是两电平逆变器端、电机端和估计电机端的相电流。对比图5(i)、图5(g)、图5(k)、图5(l)和图5(m),可以发现:由于三电平逆变器的作用,三相电流噪声减小,电机端子的过电压控制在了直流环节的两倍以内,三电平逆变器输出谐波含量少,更加接近正弦波,更加适合在长动力电缆上传输。

图6 两电平逆变器带有2 000 m动力电缆的无传感器控制仿真结果
4 结 论
通过仿真验证了提出的潜水电泵永磁同步电动机无传感器控制方法的正确性和优越性。
1)基于PMSM凸极性旋转高频电压注入无传感器控制的方法,能够精准的估算出电机转子的位置,使误差保持在0.1 r/min以内。在负载转矩为15 N·m时,电机能够正常起动,且在负载转矩突然增加为36 N·m时,交轴电流iq会快速响应来补偿负载转矩,适用于PMSM潜油电动泵起动转矩大、常工作在低速大扭矩的工作状况。
2)根据长动力电缆估算模型提出的电机端子电压/电流观测器,能够利用逆变器端的电压、电流有效估算出电机端电压、电流的实际值。
3)三电平逆变器通过长动力电缆为PMSM提供能量,能够有效解决电机端过压问题,电压降低了30%,将过电压控制在了直流环节的两倍内,减少了电机绝缘压力和电机热量的产生。
猜你喜欢
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
军事文摘(2021年16期)2021-11-28
防爆电机(2021年5期)2021-11-04
建材发展导向(2021年14期)2021-08-23
铁道机车车辆(2021年3期)2021-07-12
科学家(2021年24期)2021-04-25
趣味(数学)(2019年12期)2019-04-13
电机与控制学报(2018年9期)2018-05-14
领导决策信息(2017年12期)2017-05-17