浅谈仿生玻璃幕墙清洗飞行器设计
2022-04-10 02:48:50苟乐鹏文健卢少纯李小玉张莲洁
科技创新导报 2022年22期
苟乐鹏 文健 卢少纯 李小玉 张莲洁
(东北林业大学 黑龙江哈尔滨 150040)
随着时代的不断进步发展和人们生活水平的日益提高,人们艺术审美要求也在不断提升,玻璃幕墙凭借其特有的特点而迅速被广泛采用。然而,在人们享受其美观与视觉感的同时,高层建筑玻璃幕墙的清洗也成为了困扰业界的难题之一,清洗作业中的高危险性、高强度和日益高昂的用工费用要求必须有更安全和实用的技术来替代现在主流的玻璃幕墙人工清洗。无人机技术、人工智能技术的蓬勃发展为实现机器替代人工清洗玻璃幕墙带来了新的途径。
1 玻璃幕墙机器清洗技术的发展现状
国外对玻璃幕墙清洗机技术的研究和应用起步较早,取得了许多成果。爬壁清洁机器人在欧洲、北美和日本得到广泛研究,包括德国弗劳恩霍夫的自动控制与操作研究所(IPA)采用模块化设计方法开发的清洗机器人处于领先地位,实现了自动化,可在外墙上水平和垂直移动。1986年,美国国际机器人公司开发了SKY WASHER,这是一种爬墙移动机器人,用于清洗摩天大楼,其由两组可以相对滑动的L型臂架构成,臂架可交替吸附在墙面,以便于机器人移动,具备一定的越障能力[1]。1966年,日本大阪府立大学成功制造出世界上第一台垂直壁移动机器人的原理样机。此后,各种类型的清洁机器人相继出现并初步应用。日本Bisoh公司在20世纪80年代中期开发了一种固定路线的窗户清洁机器人,根据安装在屋顶上的路线和提升系统,准确定位冲洗,无需真空负压吸附,因此较为节约能源,但因结构复杂,该清洗机器人并未在市场上推广起来。以上这些机器人的特点是结构复杂、重量过大、成本过高,难以实现商业化[2]。
20世纪80年代末期,上海大学、哈尔滨工业大学也加入了空中玻璃清洗机器人相关项目的研发,相继研发了玻璃窗清洗机器人、爬壁机器人、轮式负压机器人等多种机器人,但缺点是缺乏清洗设备且重量较重,壁障、跃障能力不如其他机器人。
中国较为成熟的代表是北京大学航空航天公司研制的清洗机,用于国家大剧院外墙玻璃的清洗,由爬升机构、俯仰调节机构、移动机构和清洗机构等部分构成,总长约3m,高0.5m,宽1m,整个机身主体由铝型材搭建而成,不但强度高,而且相对重量也轻了许多,其在工作过程中把安装在建筑物上的滑动导杆作为中介,避免了机器人对建筑物的直接抓取可能带来的损伤及其他不安全因素。
至今为止,玻璃幕墙清洗机器人由于成本高、安全系数低、通用性差等问题尚未全面投入商业化生产,存在较大的发展空间[3]。
2 飞行器的优势
飞行器采用仿生学原理,拟瓢虫态,降低空气阻力,增加飞行稳定性;使用法兰架作框体,以降低主体的重量;利用螺旋桨差速旋转,形成离心力,进行方向转换;选用机械臂与清洗装置结合,以实现清洗功能,附加增程器来延长其工作时间;利用OpenMV模块,进行图像识别,实现玻璃表面脏污识别检测系统与水枪调节系统的结合,完成清洗工作。
爬壁式清洗机器人必须要解决的越障和攀爬移动方面的问题已经导致成本较高,并且重量较大,移动方式比较呆板,进而导致在清洗方面效率不高,这样使用户无法得到一个完美的体验。
飞行器全长约2.0m,宽1.0m,高0.7m,整体由法兰框架构成,自重10kg,可携带3kg 洗涤液,其配备了两个高能锂电池和一个六足推进器,其体积小,重量轻,操作灵活方便。该飞行器主要采用飞行方式,机械臂辅以吸盘,在操作过程中,吸盘和壁之间存在滑动密封效应,强大的气压能够保证飞行器不会从墙壁上掉落;采用控制原理,安装光电测距传感器装置,直接根据蓝牙等设备,让其跟随使用者的想法进行移动和躲避障碍物,不仅让自身重量大大减轻,在移动上也比较容易,还能减轻对玻璃幕墙带来的重量负担,给人们留下更多的空间去思考清洗的质量和检测其效果。其分为两个方面:一方面,清洗上,采用水枪调节方式对不同程度的玻璃幕墙进行清洗,高效使用了清洁剂,附带太阳能板作为增程器,绿色环保,水枪调节则需要一个检测系统来与之配合;另一方面便是脏污检测系统,它不仅能控制水枪调节,还能检测清洗效果,让用户体验得到有力保证。
控制系统框由7个模块构成:Open MV 模块、蓝牙模块、Wi-Fi模块、电源管理模块、控制核心模块、电机驱动模块、光电测距传感器。控制系统框如图1所示。

图1 控制系统框
系统主要电路模块包括控制器模块、测距模块、转向驱动模块。通过脏污识别检测系统传递图像,光电测距模块检测障碍物的信息,然后送到控制器模块STM32F103单片机中,STM32对数据进行处理,转向驱动模块控制机械臂的转动和螺旋桨的转速。
3 结构设计图
根据前文所述,飞行器总体结构设计如图2所示,主要由水压自动调节系统、脏物识别检测系统、循迹避障控制系统等功能系统组成。
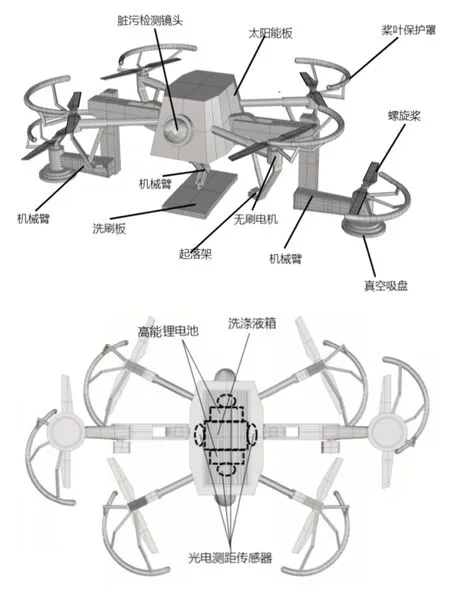
图2 飞行器结构图
4 系统及功能设计
4.1 玻璃表面脏污识别与检测系统
基于机械视觉的玻璃表面脏染识别与检测系统由图像采集、图像处理、输入输出、智能控制和机械执行等部分组成,其具体工作过程如下。根据不同类型的玻璃窗表面污垢,智能控制系统控制来自图像采集模块的信号,摄像头获取玻璃表面污垢图像,经过图像采集卡,将图像数据采集到内置存储器,通过VS 和开放式MV 玻璃表面污渍特征识别算法的开发,对污渍图像进行阈值分割,对经过适当处理的污渍灰度图像进行一系列打开和关闭操作,并根据污渍特征的不同灰度阈值,从图像中提取污渍特征信息,之后,通过输出设备输出检测结果,并与智能冲洗装置相配合,调控脏污清洗力度[4]。
4.2 飞行功能
采用无人机飞行PID控制及智能PID控制技术[5],捷联磁控传感器、GSP 导航接收机、大气数据系统、空速传感器等远程通信设备和机载软件以数字格式传输和交换信息,因此,选择高性能PC104总线嵌入式计算机系统电路飞控系统布局。它有高性能接口模型、高性能模块电源、特用ATc 功能模型和传感器、执行器、任务控制等,高性能的飞行控制系统由它们组成。
六旋翼飞机的飞行动力由6 个螺旋桨提供,通过改变每个旋翼的速度来控制飞机完成爬升和悬停动作;6个无刷电机产生的总升力使6个转子沿垂直方向移动;6个电机的升力差会改变6个转子的俯仰角和偏航角,从而改变运动方向;扭矩的差异将导致6个转子偏航角的变化,从而使机身中部的两个机械臂吸盘进行吸附[6]。
采用六旋翼,一是有更多的旋翼参与到飞行器的俯仰、滚转姿态控制,安全性更强;二是可以有效减少机械臂和旋翼对脏污检测视野的遮挡;三是相较于四旋翼的十字型和X型,六旋翼受力更为平衡,机动性较好,不同的旋转速度可以使六旋翼飞行器做出垂直起降、俯仰、横滚、偏航等基本动作。
4.3 固定功能
利用真空负压吸附技术,真空吸盘通过风道与真空设备(如真空泵等)连接,然后与玻璃幕墙接触。该程序启动真空设备的抽吸,使吸盘内产生负压,使飞机与玻璃幕墙牢牢地吸在一起,提高工作的稳定性。清洗完成后,程序启动滑阀,使真空吸盘从负压变为零压或略为正压,清洗后,真空吸盘与玻璃幕墙分离,继而去完成下一块玻璃幕墙的清洗任务。
4.4 水压自动调节系统
通过脏污识别检测系统的扫描,将清洗部位的图片传输到内置储存器,经过算法分析、程序操控,最后机械输出到水压自动调节系统,改变水压大小,水流通过清洗机械臂的喷头冲洗玻璃,提高清洁效率。
4.5 循迹避障小车控制系统
基于光电传感器的循迹避障小车控制系统可精确探测各个方向上的障碍物,主动规划安全路线,实现安全避障[7]。
4.6 PLC机电一体化控制系统
通过PLC 机电一体化控制系统[8],进行对脏污检测系统、水压调节系统、光电传感器的循迹避障小车控制执行,接着系统的数据执行发出指令,然后飞行器根据PLC的指令进行轨迹的运动,达到稳定控制的能力。
4.7 工作步骤
利用智能操纵面板如云端、手机等,通过蓝牙或Wi-Fi连接来控制飞行器,通过单片机传输命令,让无刷电机带动螺旋桨,经过高能锂电池,为无刷电机提供电能,移动到指定位置后,同时打开脏污检测系统(OpenMV 模块),通过光电测距传感器感应到洗刷板与幕墙的距离,然后利用上下螺旋桨之间差速旋转形成离心力,进行方向调整,同时,安装在主体中间部位机械臂上的螺旋桨减速,螺旋桨下面的吸盘吸附到玻璃幕墙上,此时,主体内部的清洗装置通过机械臂伸展出来,对幕墙进行清洗。若之前有检测到污垢较高的地方,则清洗到该部位时,机械臂头部会自动调控水压大小和清洗力度,从而达到较高的清洗效果。当清洗下一块玻璃幕墙时,由机械臂控制的真空负压式吸盘进行移动。当洗涤液用完时,系统接收到信息,启动程序进行飞行换液,提升其工作效率,换液后,可直接根据其记忆储存信息到达之前清洗的位置继续清洗。当飞行器工作时,还可以利用外加增程器太阳能板进行电量的供给。
5 结语
飞行器可以将清洗功能和攀爬飞行的功能有机结合,实现对玻璃幕墙表面脏污的识别检测和清洗,达到新技术在极端工作条件下所要求的效果,玻璃幕墙的清洗问题得到解决,实际使用价值较大。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
建材发展导向(2021年16期)2021-10-12 05:39:52
建材发展导向(2021年11期)2021-07-28 06:58:00
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
老友(2020年5期)2020-05-21 02:50:44
中国铁道科学(2020年2期)2020-04-08 08:01:28
铁道建筑(2019年9期)2019-10-18 06:04:32
建材发展导向(2019年10期)2019-08-24 06:26:00
电子制作(2019年9期)2019-05-30 09:41:48
上海建材(2018年4期)2018-11-13 01:08:54