听障跆拳道运动员在双腿站立到单腿站立过渡任务中的平衡能力研究
2022-04-08 06:50段传勇张剑波刘卫军张瑛秋
中国体育科技 2022年3期
段传勇,张剑波,李 明,刘卫军,张瑛秋
平衡能力或姿势控制是指在活动中保持身体在空间位置上的稳定性(stability)和定向性(orientation)的能力,是一种复杂的感觉运动控制技巧(Shumway et al.,1995)。它不仅需要肌肉力量控制身体的空间位置,还需要通过中枢神经系统来整合各种环境或任务下感觉系统(视觉、本体和前庭)提供的与身体空间位置和运动状态相关的信息(付奕等,2010),从而产生适当的纠正力矩(Horak et al.,2010;Johansson et al.,1991)。由于不同的感觉信息并不总是可用或准确的,中枢神经系统必须以某种方式进行感觉运动调整,以在各种运动环境下保持姿态(Lord et al.,2005;Shumway et al.,1995)。对听障跆拳道运动员来说,由于先天性听力缺失或障碍引起的前庭窝神经的部分损伤,导致对平衡能力影响较大,可能引发姿势控制障 碍(Collins et al.,1991;Meredith,2013;Potter et al.,1984),从而增加下肢关节损伤概率(Dallinga et al.,2012;De Noronha et al.,2008;Durall et al.,2011;Mcguine,2006;Wang et al.,2006)。
目前研究多致力于寻找敏感的平衡测试区分病理和健全的受试者(Dingenen et al.,2013;Gribble et al.,2009;Levin et al.,2012;Patterson et al.,2013;Phillips et al.,2008;Potter et al.,1984)。由于测试过程相对容易,研究通常在安静状态下评估平衡能力,不易引起姿势控制缺陷(Reimann et al.,1999)。有研究强调动态姿势稳定性测试极有可能引发肢体控制障碍(Duysens et al.,2010;Mckeon et al.,2008)。有些动态测试(如Biodex Stability System)虽能客观地测量平衡能力,且测试有较高的可靠性并与静力板的数据相关性较高(Arnold et al.,1998),但在不稳定的支撑面上(持续刺激)保持平衡并不能代表真实运动条件(Hinman,2000)。还有一些早期基于实验室条件下的人体姿态控制的研究采用瞬态刺激(如支持表面突然运动)唤起典型的姿态反应(Allum,1983;Diener et al.,1984;Horak et al.,1986;Nashner et al.,1977)或人为刺激感受器(如肌肉或肌腱振动)(Kavounoudias et al.,1999)和前庭神经电刺激(Nashner et al.,1974;Watson et al.,1998)方法,其完全被动的应答类型脱离了运动实际。
听障受试者倾向于在动态环境中表现出神经肌肉控制策略和模式的差异性(付奕 等,2011;Horak et al.,1990;Maheu et al.,2017;Oliveira et al.,2011;Peterka,2002),因此,一种可选择的测试方法就是重心转移(weight-shifting)。Gribble等(2009)认为,稳定用时(TTS)技术是一种重心转移动作模式的测量动态稳定性的方法,研究分析了受试者从姿态扰动中恢复稳定并将地面反作用力控制在稳定姿态范围内所需的时间。目前,TTS技术已经被广泛用于病理识别测试,如膝关节损伤(Lord et al.,2005;Patterson et al.,2013)、踝关节损伤(Dingenen et al.,2013;Gribble et al.,2009;Levin et al.,2012)、偏瘫患者(Dickstein et al.,1989)、中风患者(Haart et al.,2005)、帕金森患者(Mancini et al.,2012)等。但目前关于TTS识别技术的研究多关注于康复和医疗,还未从根本上认识到运动专项化特征对姿势稳定性的要求,不能完全满足体育科研的需求。听障跆拳道运动员兼具有病理和竞技双重属性,研究听障运动员姿势稳定性,对于提高其运动表现,降低运动损伤风险具有实践意义。
采用双腿站立阶段(DLSP)向单腿站立阶段(SLSP)重心转移的过程来研究听障跆拳道运动员的姿势控制,重点关注了重心转移过程中和转移后的平衡控制过程。本研究假设:1)听障跆拳道运动员压力中心(center of presure,COP)转移需要更长的时间,即过渡用时(TTR)、准稳定用时(TQSP)和TTS增加;2)听障跆拳道运动员在准稳定阶段(QSP)和SLSP的COP位移均方根值和速度均方根值增大。
1 研究对象与方法
1.1 研究对象
以22名备战2019年第10届残疾人运动会的北京队和山东队听障跆拳道运动员为受试者。从北京体育大学竞技体育学院跆拳道专项班和附属竞技体校征募22名健全跆拳道运动员,并与听障跆拳道运动员在身高、年龄、训练水平上进行匹配。受试者基本情况如表1所示。
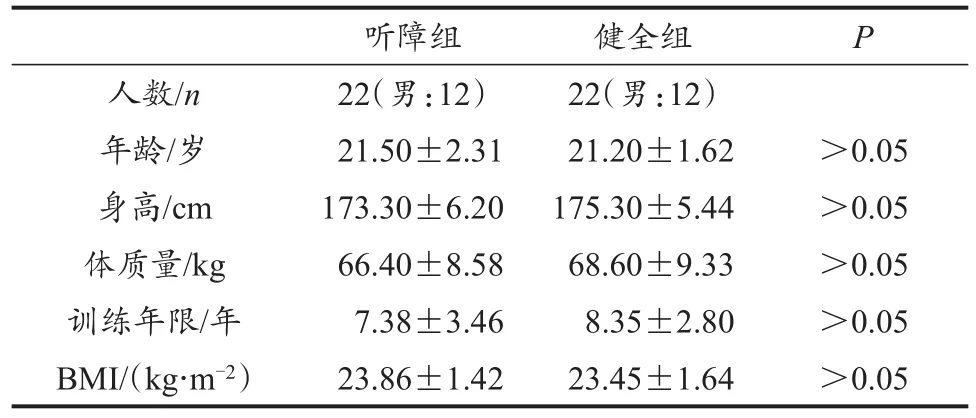
表1 受试者基本信息Table 1 Basic Information of Subjects
受试者通过健康状况问卷调查,显示健康状况良好,听障组受试者均具有10年以上的听障生活和学习经历,视觉和其他感官知觉发育完善,近3个月无急性下肢和头部损伤,也无任何平衡障碍。此外,无任何慢性踝关节或膝关节损伤或损伤史,无任何急性或慢性背痛或损伤。在完成相应动作时无任何剧烈的疼痛影响他们以习惯的方式完成规定动作。受试者保持常规作息和饮食,未服用任何形式的保健品和药物,均同意参加本次实验,正式实验之前,只告知受试者具体实验过程,但对实验目的不知情。所有受试者优势腿皆为右腿,所有测试均采用左腿支撑,右腿摆动。测试地点为北京体育大学科研中心。
1.2 研究方法
1.2.1 数据收集
使用Micro 1401数据采集系统和Spike 2软件(Cam‐bridge Electronic Design,UK),采样频率 500 Hz的瑞士Kistler(Kistler Instruments AG Corp.Winterthur,Switzer‐land)三维测力台(90 cm×60 cm)上和低通滤波(截止频率为5 Hz)测量地面反作用力、力矩和COP等参数。
1.2.2 实验步骤
测试以裸足方式进行,实验前受试者着宽松运动服、运动鞋在室内跑步机上完成5 min慢跑(速度为6 km/h)和5 min拉伸等热身。正式测试时受试者站在测力台上,双腿与肩同宽,双臂自然下垂,完成1次从DLSP(约30 s)到SLSP(>5 s)的过渡任务。DLSP时将脚的位置标记在测力台上,以确保受试者每次试验后回到相同的起始位置。DLSP时要求受试者尽量保持30 s静止,在测试人员的动作信号(轻触肩膀)下抬起对侧腿至髋部屈曲90°位置,保持至少5 s的SLSP。受试者按下列顺序,在睁眼偏好速度(preferred speed with eyes open,PSEO)、睁眼最大速度(maximum speed with eyes open,MSEO)、闭眼偏好速度(preferred speed with eyes closed,PSEC)和闭眼最大速度(maximum speed with eyes closed,MSEC)4种条件下完成重心转移过渡任务,每种条件下重复4次测试,受试者测试顺序随机。在睁眼条件下测试时,要求受试者直视前方的白色墙壁;在闭眼条件下测试时,要求受试者闭眼,头部保持水平。在实际测量前,受试者在每种测试条件下进行2次练习以熟悉动作。两种测试条件之间,受试者可以休息以避免疲劳。
1.2.3 数据处理
综合Van Deun等(2011)描述的方法进行数据分析,从DLSP过渡到SLSP时,人体COP首先向摆动腿方向移动,摆动腿抬腿之前往对侧(支撑腿侧)推离,从而进入SLSP。将整个任务分为4个阶段:1)DLSP,定义为过渡任务开始点(SP)之前的阶段;2)过渡阶段(TRP),定义为SP与COP在ML方向速度矢量第2次为零之间的阶段;3)QSP,定义为COP在ML方向的速度矢量第2次为零至新稳定点(NSP)之间的阶段;4)SLSP,定义为新稳定点(NSP)之后的阶段。其中TRP和QSP的时间总和为TTS(图1)。

图1 某听障受试者MSEC下从DLS到SLS过程中COP位移随时间变化示意图Figure 1.Schematic Diagram of a Hearing-Impaired Subject’s COP Displacement Changing with Time from DLS to SLS Under the Condition of MSEC
AP和ML方向的COP轨迹数据是从开始重心转移的前10 s开始计算的,此期间受试者处于DLSP。首先,分别用AP和ML方向力矩除垂直力计算AP和ML方向COP位移。COP位移由AP和ML方向位移均方根值计算得到,公式为Dingenen et al.,2013)。TTS需要通过序贯估计方法(sequential estimation method)计算COP向量模(vector modulus)的累积平均值来确定(Colby et al.,1999)。为确定累积平均值,先对COP向量的调制解调器的前2个数据点取平均值,然后对前3个数据点取平均值,再对前4个数据点取平均值,以此类推。直到计算最后1个COP向量模时,各点的累计平均值(估计值)达到其最终值减去其标准差0.25的时间点被认为是新稳定点(Colby et al.,1999),此时受试者进入SLSP(图1)。此外,本研究计算了QSP后3 s的COP位移均方根值和速度均方根值。
2名听障组受试者和1名健全受试者由于SLSP的稳定持续时间短(<5 s)且COP过度摇摆,序列估计方法未能计算出TTS。因此这3名参与者的数据不包括在统计数据中。
采用的参数包括:4个阶段的COP位移均方根值和速度均方根值、TTR、TQSP、TTS。
1.3 统计分析
所有受试者基本特征均呈正态分布。年龄、体质量、身高、训练年限、BMI组间比较采用独立样本t检验,性别采用卡方检验。计算所有姿态稳定性结果的4次试验的平均值,所有结果均呈正态分布(P<0.05)。采用重复测量方差分析(ANOVA),分析条件与组间的差异。Tukey测试用于事后比较。所有分析的显著性为P<0.05。使用SPSS 22.0进行统计分析。
2 研究结果
2.1 听障组与健全组TRP时间参数对比
2.1.1 TTR、TQSP和TTS
图2所示为听障组与健全组TTS、TQSP、TTR“平均数±标准差”和“组×视觉×速度”方差分析结果。总体而言,听障组在PSEC条件下需要更多TTR、TTS(P<0.05)。与最大速度条件相比,两组在偏好速度条件下的TTS(图2A)和TTR(图2B)显著增加(P<0.001),闭眼条件下的TQSP(图2C)也显著增大(P<0.001)。

图2 听障组与健全组组间及不同条件下差异Figure 2.Differences between Groups and Under Different Conditions
2.1.2 相关性
TTR与TTS结果间呈高度正相关,表明TTS的延长与过渡的延缓有关(图3A、图3C)。上述效应在各组和各种条件下都已经观察到了。但闭眼条件下(听障组:RPSEC=0.72,PPSEC=0.025;RMSEC=0.65,PMSEC=0.038;健全组 :RPSEC=0.82,PPSEC=0.046;RMSEC=0.67,PMSEC=0.022)比睁眼条件下(听障组:RPSEO=0.66,PPSEO=0.017;RMSEO=0.56,PMSEO=0.048;健全组:RPSEO=0.60,PPSEO=0.029;RMSEO=0.54,PMSEO=0.011)更明显;偏好速度条件下(听障组:RPSEC=0.72,PPSEC=0.025;RPSEO=0.66,PPSEO=0.017;健全组:RPSEC=0.82,PPSEC=0.046;RPSEO=0.60,PPSEO=0.029)比最大速度条件下(听障组:RMSEC=0.65,PMSEC=0.038;RMSEO=0.56,PMSEO=0.048;健全组:RMSEC=0.67,PMSEC=0.022;RMSEO=0.54,PMSEO=0.011)更明显。TQSP结果与TTS结果间呈低度正相关或不相关,表明更长的稳定区间与QSP恢复可能没有关系(图3B、图3D)。

图3 过渡任务中TTR与TTS、TQSP与TTS间的相关性Figure 3.Correlation Between TTR and TTS,TQSP and TTS in Transition Tasks
2.2 听障组与健全组COP轨迹对比
2.2.1 COP位移均方根值、速度均方根值、峰值位移、峰值速度对比
由于不同研究结果的差异可能是因使用不同COP摇摆参数造成的,本研究COP分析使用了4种不同的参数,即峰值位移(peak DISP)、峰值速度(peak VEL)、位移均方根值(DISP RMS)和速度均方根(VEL RMS)。
在峰值位移方面,速度对峰值位移的影响显著(P<0.001),而病理和视觉对峰值位移的影响不显著(P>0.05)。例如,研究发现TRP、QSP峰值位移在最大速度条件下显著增加(P<0.001)(图4)。
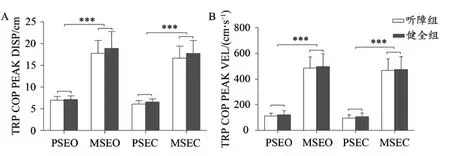
图4 听障组与健全组不同条件下COP峰值位移和峰值速度在TRP时的差异Figure 4.Differences of COP Peak Displacement and Peak Velocity Between Groups and Conditions in the Transitional Phase(TRP)
听障组和健全组在TQSP以最快速度完成重心转移任务时位移均方根值显著增加(P<0.001);在闭眼条件下,听障组位移均方根值显著增加(P<0.001;图5B)。SLSP时,两组在闭眼条件下位移均方根值显著增加(P<0.001;图5C)。

图5 听障组与健全组不同条件下COP位移均方根值在DLSP(A)、QSP(B)、SLSP(C)的差异Figure 5.Differences of COP Displacement Root Mean Square Value in the DLSP(A)、QSP(B)、and SLSP(C)between Groups and Under Different Conditions
2.2.2 相关性
假设2表明,当达到SLSP时,COP转移的延迟与不稳定性的增大相关。根据这一假设,本研究发现,听障组(而非健全组)在睁眼条件下的过渡过程中,COP速度均方根值与TTS呈正相关(R=0.52,P<0.05)。然而,对过渡期间TTR和闭眼条件下TTS,后者的观察没有得到证实(P>0.05)。相比之下,研究发现无论是健全组还是听障组,COP位移均方根值和TTR之间没有显著的相关性(P>0.05;图6)。
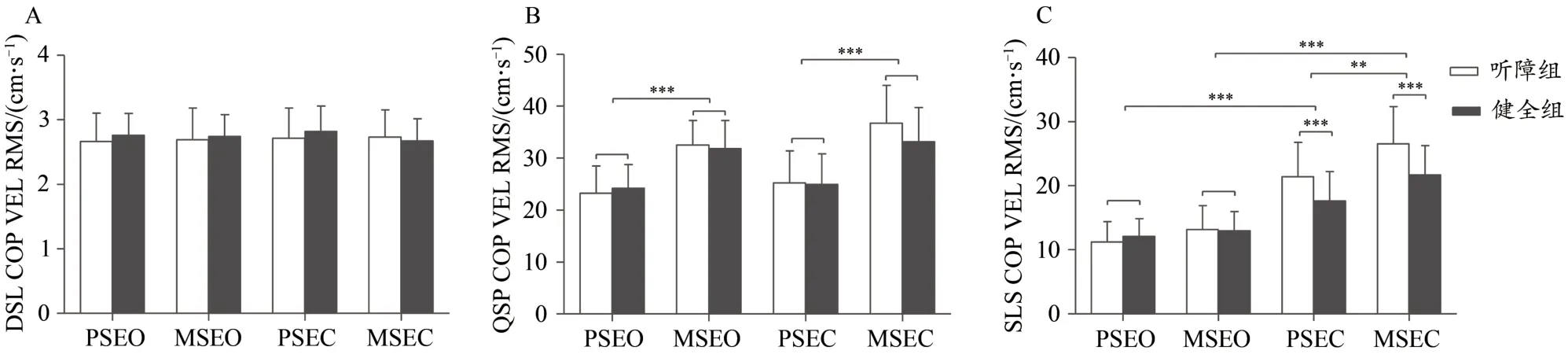
图6 听障组与健全组在不同条件下COP速度均方根值在DLSP(A)、QSP(B)、SLSP(C)的差异Figure 6.Differences of COP Velocity Root Mean Square Values in the Two Groups in the DLSP(A),QSP(B)and SLSP(C)Under Different Conditions
3 分析与讨论
重心转移是一种非常自然且信息丰富的测试方法,对多种类型的患者姿态评估都较为方便(De Haart et al.,2005;Dickstein et al.,1989;Geurts et al.,2005;Ishii et al.,2010)。本研究表明,TTS评估是一种有效识别听障跆拳道运动员姿势稳定性缺陷的方法,听障跆拳道运动员的姿势稳定性要低于健全跆拳道运动员。本研究发现,将TTR、TTS及COP摆动量作为鉴别参数,TTR的延长与TTS的延长有关;TQSP与TTS不相关,且TTS的延长与SLSP的COP摆动幅度的增加没有联系。目前部分数据支持听障跆拳道运动员使用重心转移保护策略(某些条件下较长的TTR)。然而,这些数据无法用来证明观测事件之间存在因果关系(较慢的TTR、较长的TTS和转移后较大的COP摆动),事实上,这些过程可能是独立的。
TTS评估测试将受试者置于4种不同的条件下,通过改变重心转移时视环境条件、扰动程度以及支撑面的大小,有步骤地控制视觉和本体感觉的信息输入,从而分别对视觉、本体和前庭系统等成分在维持姿势稳定性的作用上进行单因素分析,对比听障跆拳道运动员与健全跆拳道运动员的神经系统组织并适应有限的感觉信息的区别。基于跆拳道运动员的姿势稳定性高于普通人的基本事实,在TRP时对摆动腿提膝高度做了与髋部呈90°规定,以加大摆动腿动作幅度和身体姿态不对称性,增加了扰动,同时,受试者更能准确做到摆动腿提膝至与髋部呈90°,尤其在去除视觉后,这也更加符合跆拳道专项运动特征。
3.1 DLSP平衡能力分析
本研究发现,听障组和健全组TTS评估在DLSP的姿势稳定性(COP位移均方根值和速度均方根值)没有显著性差异。Fitzpatrick等(1994)研究表明,前庭阈值比视觉或本体感觉阈值大1个数量级,且高于正常站立时可以记录到的最大摇摆运动,这意味着在DLSP中几乎不依赖前庭觉控制姿态。本研究听障跆拳道运动员因内耳前庭器的前庭传入纤维破坏导致的听力障碍或缺陷,使多感觉整合过程缺乏听觉通道信息的反馈,是影响平衡能力的重要原因之一(雷正方等,2018),但双腿站立在稳定支撑面时,即便将视觉去除,本体感觉也可以代偿维持姿态控制。有证据表明,当大脑被剥夺了一种感官模式的输入时,通常会通过1个或多个完整的感官系统的超常表现来补偿,即使在没有声音输入的情况下,听觉皮层的跨模态重组可能提供调节视觉代偿功能的神经基质(Lomber et al.,2010)。张凤琴(2000)研究表明,听障人群往往因过度依赖视觉输入维持姿势控制,发展出“直觉捕捉”反应策略。Fitzpatrick等(1994)也报道了站立时本体觉感知摇摆的阈值非常小,闭眼并不影响感知摇摆的阈值。
而在DLSP之后的重心转移过程以及非稳定支撑面阶段,听障组和健全组的姿势稳定性开始出现差异(P<0.05),提示视觉和本体感觉受到干扰或破坏时(即支持面不稳时),前庭觉将发挥重要作用。Horak等(2015)报道,在稳定支撑平面上,本体觉、前庭觉和视觉在维持稳定功能中分别占70%、20%和10%。意味着在非稳定阶段,人体进行姿势控制时对3种感觉依赖程度比例将发生变化。
3.2 TRP和QSP平衡能力分析
TRP的主要挑战是将重心从相对稳定的DLSP转移至SLSP(Hodges,1997);QSP的主要任务是尽量消除TRP的“扰动”,获得“新稳定”,2个阶段的共同任务是缩短TTS。本研究测量了TTR、COP峰值位移和峰值速度来描述TRP的姿势稳定性。采用TQSP、COP位移均方根值和速度均方根值来描述QSP的姿势稳定性。还测量了TTS来描述整个中间转换过程的姿势稳定性。
与健全组相比,听障组在PSEC条件下TTR显著增加,而在最高速度条件下各组间差异无显著性意义。TTR增加可能是为了保持相同的运动表现(摆动腿速度)。除此类较慢的TTR外,听障组TRP COP峰值位移和峰值速度都有所减小。
姿势控制是一种复杂的运动控制技巧,当人体要完成指定任务时,中枢神经系统对多种感觉信息进行整合分析后下达运动指令,这时人体通过3种运动调节机制和姿势协同运动来做出相应的改变,即踝关节调节、髋关节调节及跨步调节(Horak,2006;Shumway et al.,1995)。TRP中受试者需要建立稳定的支撑基础以便重心转移。当身体重心向目标移动时,需要恰当的速度,准确的目标和协调性,及时的姿势稳定性,踝关节(大幅度,缓慢运动)、膝关节、髋关节(小幅度,短距离运动)和躯干周围肌群参与维持姿势运动控制能力(金挺剑等,2009;Fabio et al.,1990;Liston,1996)。
在随意运动开始之前,中枢神经系统(CNS)将通过身体两侧预期姿势调整来消除摆动腿的“扰动”从而保持身体稳定性。这种预期姿态调整发生在随意运动之前,可能发挥 双 重 作 用(Bouisset et al.,2009;Yiou et al.,2012a):一是“反扰动”,通过向计划扰动(即摆动腿运动)的预期效果的相反方向进行运动,以减少因随后的随意运动而引起的姿势干扰;二是通过产生必要的推进力来引发运动,从而起到一种姿势上的“扰动”作用(Bouisset et al.,2009;Yiou et al.,2012a)。预期姿势调整的特性可以根据预期自主运动引起的扰动来分级,其中运动速度可能是至关重要的(Rogers,1992;Rogers et al.,1990,1993;Yiou et al.,2012b)。
除TTR较长外,本研究发现听障组在4种条件下COP峰值位移和峰值速度均小于健全组,但无显著性意义。而有研究指出,在神经性失调患者(Hass et al.,2005,2008)以及慢性踝关节不稳定患者(Dingenen et al.,2015)中观察到了COP位移和COP速度的减小,表明预期姿势调整的不充分。不稳定或病态的受试者可能会使用一种他们感觉更安全的策略来控制负荷转移,以尽可能降低单腿站立时的姿势挑战(Dingenen et al.,2015;Yiou et al.,2011)。在对踝关节不稳定患者研究中发现,中枢神经系统可以减少或抑制TRP的预期姿势调整,以最小化其潜在的不稳定影响(Bouisset et al.,2009),这一现象还在急性卒中后患者(Haart et al.,2005)、髋关节骨关节炎患者(Tateuchi et al.,2011)、膝关节炎患者(Viton et al.,1999)的姿势控制中有过描述。另外听障运动员多年的生活和学习使得其更依赖视觉信息,闭眼后会对外界不确定刺激产生恐惧心理,从而影响平衡信息在大脑中传播(Walicka-Cupryś et al.,2014)。本研究推测听障运动员在某些条件下整合各种躯体感觉信息从而做出充分的姿势调整的能力较健全运动员弱,但需要更多的实验证据进一步验证此假设。
本研究中以最大速度运动时,听障组与健全组受试者TTR和TTS均显著缩短,COP峰值速度和峰值位移均显著增加。研究表明,摆动腿运动时间缩短时COP运动速度会增加(Rogers,1992;Rogers et al.,1993;Yiou et al.,2012b)。在最大速度条件下,组间的COP峰值速度和TTR无显著差异。在偏好速度条件下,听障组闭眼后的TTR时间显著长于健全组,提示当有时间压力时,听障跆拳道运动员能够达到和健全组相同的过渡速度,当没有时间压力时会选择降低过渡时的速度。这同时表明,在PSEC条件下,可以将TTR作为鉴别听障跆拳道运动员的敏感指标。
注意到当听障组和健全组皆以最大速度运动时,TRP COP峰值位移和峰值速度显著增加,而TTR显著缩短,且没有影响动态稳定性。这支持了在快速过渡时,缩短的TTR可能由更大的COP位移补偿(Yiou et al.,2012b)的观点。还支持了与之相似的观点,即在没有充分反馈控制的情况下执行过渡任务以节省时间,是以动作精确性为代价的(Diener et al.,1988)。挑战增大,却没有足够的TTR进行预期姿势调整(Frank et al.,1990),受试者可能通过更侧向地移动摆动腿来恢复两侧平衡,以补偿两侧预期姿势调整的不足(Zettel et al.,2002a.,2002b)。因此本研究认为,在时间压力下,受试者为了更快地开始自主运动,缩短了TTR,同时增加了COP振幅,以保持最佳的动态稳定状态。
Mergner等(2009)研究表明,在动态空间平衡中,空间感觉反馈(前庭)比动力反馈(力线索)更重要,且人体姿态在高速变换的状态下保持平衡时对前庭觉依赖加大。这种人体保持平衡时对不同感官信息利用程度受具体运动条件影响的观点,大体上与先前姿势控制研究的观点一致(Forssberg et al.,1982;Horak et al.,2010;Nash‐ner,1982),包括基于前庭电刺激实验以及一般的运动控制实验(Hultborn,2001;Prochazka,1989)的结果也证明这一观点。这意味着,受试者视觉、听觉、重心转移的速度、幅度以及支撑条件会极大影响姿势控制对不同感觉的依赖程度,也会影响某些指标的敏感性。在正常放松状态下本体感觉阈值和视觉阈值都足够小,足以让受试者感知到身体的摇摆,但在运动速度较高时阈值也升高(Fitz‐patrick et al.,1994),因而获取身体位置和状态信息也变得更有挑战。
听障组TTS的增加可能主要是由于TTR的增加。本研究发现,TTS与TTR有良好的正相关关系,而TTS与TQSP则只有微弱的相关。当受试者闭眼以他们喜欢的速度移动时,听障组的过渡速度明显慢一些。听障与健全受试者达到一个新稳定点所需要的时间差在很大程度上取决于运动速度。然而,在新稳定点之后,听障组在闭眼后的摇摆量显著增加,提示,听障受试者克服自主运动造成的姿势扰动的能力下降。但只关注TTS可能会导致至少在某些情况下,在评估姿势稳定性时产生误解(Ding‐enen et al.,2015)。本研究还发现,两组受试者在闭眼时,运动速度越快,TTR和TTS明显越短。当以最快速度运动时,无论是睁眼还是闭眼,两组间均未发现明显差异。因此,当在最快速度条件下时,TTR和TTS可能不是识别听障受试者的最佳参数。这也表明,听障跆拳道运动员具有良好的适应机制,能根据不同的环境能做出不同的时空参数调整。
3.3 SLSP平衡能力分析
SLSP时,受试者面临的主要挑战是保持新平衡(Hodges,1997)。本研究测量了COP位移均方根值和速度均方根值来描述SLSP的姿势稳定性。
在闭眼条件下,听障组COP位移均方根值和速度均方根值显著大于健全组。在此阶段,连续的姿势调整作为一种机制来平衡由随意运动产生的反作用力(Memari et al.,2013)。有证据表明,一些听觉损失的受试者使用增加肌肉刚度的策略来补偿其前庭觉损失(Peterka,2002),肌肉紧张时感知脚踝运动的阈值明显增加(Fitz‐patrick et al.,1994)。个人行为的调整会影响并调整感觉与运动之间的映射(Horak et al.,1997;Kuo,2005)。本研究受试者在单腿不稳定支撑条件下,踝关节本体感觉通道遭到一定程度破坏,尤其在失去视觉信息时,受试者对前庭觉利用加大,而听障组无法从听觉通道进行平衡信息补偿,导致姿势控制能力低于健全组。
Black等(1983)发现,前庭觉通常提供绝对的空间参考,以修正不准确的视觉和躯体感觉空间参考。Lund等(2010)发现,相同的前庭刺激会根据躯体感觉系统的状态导致不同的姿势反应。Inglis等(1995)发现,站在不稳定表面上的正常受试者对前庭电刺激的反应增强。当受试者同时做自主运动时,对电流的姿势反应也更大(Brit‐ton et al.,1993;Gurfinkel et al.,1988)。Horak等(1994)研究表明,当受试者站在不稳定表面时,踝关节肌肉对头部扰动的反应增加。这些证据表明,测试条件对前庭觉利用的重要性,当受试者没有或不确定身体空间方位的体感信息时,对前庭信号的反应似乎会上升。一些对动物感官损失后的补偿研究也表明,在失去一种感觉时,会发生前庭觉和本体感觉相互替代的现象(Britton et al.,1993;Dieringer et al.,1984;Pfaltz et al.,1973;Putkonen et al.,1977)。在人体实验中,前庭功能受损会导致从足和颈部(颈-眼)获得更强的躯体感觉信息(Bles et al.,1984),并在神经上适当地转换各种感官信号,以便通过各种感官信息控制COP运动(Mergner et al.,1991,1997)。本研究认为,在闭眼单腿站立时,听障与健全跆拳道运动员控制COP的能力有差异。虽然,Mittelstaedt(1998)研究表明,人体能够接收源自非前庭系统的重力性刺激信号,Horak等(1986)也认为,前庭感觉系统和躯体感觉系统很可能存在类似于协调替代的复杂相互作用。但本研究结果提示,即使存在感觉之间的代偿机制,听障跆拳道运动员在闭眼单腿支撑的条件下也不能完全弥补因听力损失导致的前庭觉缺失。事实上,支持面稳定时(如DLSP),健全受试者主要依赖体感信息来确定姿势定向,前庭信息被认为只在支持面不稳定时用于后定位(Mergner et al.,1998)。因此本研究推测,闭眼DLSP稳定支撑状态,主要依靠躯体感觉维持姿势稳定,而SLSP非稳定支撑状态,则更加依赖前庭信息来控制平衡,尤其在去除视觉信息时。
3.4 研究局限
TTS评估包含了人体姿态控制或恢复的动态部分和静态部分。应注意到,很多时空参数不显著可能由多种原因造成,限制人体不同的感觉可能会产生多种效果,然而对感官因素与运动表现之间的因果关系知之甚少,这需要在进一步的研究中加以探讨。
本研究的一些局限性需要加以解决:1)由于没有进行运动学测量,无法准确测量摆动腿的运动速度和运动位置,也无法验证听障运动员是否采用各种“平衡策略”;2)研究发现受试者的耐力及认知水平直接影响姿势稳定性,TTS评估要求较高,耐力及认知水平较差的受试者不能很好地完成评估;3)受试者的依从性与自信心在评估过程中也起到非常重要的作用。综上,在应用TTS评估姿势控制过程中应对听障受试者耐力、认知水平及心理因素有比较深入的了解。
4 结论与建议
4.1 结论
听障跆拳道运动员睁眼条件下姿势稳定性与健全跆拳道运动员的没有差异(P>0.05),能够较好地利用多感觉通道信息维持平衡,在闭眼条件下的姿势稳定性要明显弱于健全跆拳道运动员。听障跆拳道运动员闭眼条件下SLSP的COP位移均方根值和速度均方根值都小于健全跆拳道运动员,在以偏好速度完成重心转移时,听障跆拳道运动员需更多的TTS达到稳定,更多的TTR进行姿势调整。在DLSP向SLSP重心转移过程中,TQSP不是区分稳定和不稳定受试者的敏感参数,相比之下,TTS、TTR以及SLSP的COP位移均方根值和速度均方根值能明显区分为听障与健全跆拳道运动员。
4.2 建议
由于本研究结果大多受摆动腿动作速度和幅度的影响,建议未来的研究在比较健全和听障受试者的姿势稳定性时,根据不同的专项技术来设计重心转移的动作速度和幅度。TTS测试可能有助于识别听障跆拳道运动员过渡任务后稳定缺陷,可以将这些信息将作为制定康复或训练方案的依据。比如,通过听障受试者恢复到动态姿势稳定性基线的时间来判断其是否处于良好的运动状态。TTS测试也可用于康复和训练。在运动中,大脑会从各种感觉信息输入中选择最重要的信息并做出相应地运动反应,并存入记忆,使有意识的随意运动变成一种无意识的模式化运动(Mulder,1991;Shumway et al.,1995)。控制多种感觉输入,受试者会做出相应地运动反应维持姿势的稳定性,可以通过反复多次强化,直至形成模式化运动,从而提高听障运动员的平衡能力,进而改善运动表现。
猜你喜欢
世界最新医学信息文摘(2022年43期)2022-11-19
环球时报(2022-03-08)2022-03-08
载人航天(2021年5期)2021-11-20
家教世界·V家长(2021年3期)2021-04-09
家教世界·创新阅读(2020年11期)2020-12-15
家庭医学(2020年10期)2020-11-20
保健与生活(2019年16期)2019-09-17
现代家长(2016年11期)2016-12-05
党的生活(黑龙江)(2016年8期)2016-08-15
祝您健康(1983年1期)1983-12-29