
地铁移动测量系统时间基准传感器性能测试技术研究
2022-04-06 06:16邹禄杰花向红巢佰崇赵不钒李琪琪
测绘工程 2022年2期
邹禄杰,花向红,巢佰崇,赵不钒,李琪琪
(1.武汉大学 测绘学院,武汉 430079;2.武汉大学 灾害监测与防治研究中心,武汉 430079)
地铁移动测量系统(Subway Mobile Mapping System,SMMS)是一种由多个传感器集成的轨道测量车[1],它具有快速、动态、高效、安全、精确的优点[2],是移动测量技术在地下轨道交通的一次重要应用[3]。对于SMSS这种多传感器集成系统来说,由于参与集成的各个传感器精度不同,其对目标的测量周期不同步,且具有不同的传输时延等原因,导致融合中心接收到的不同传感器的测量数据存在数据异步问题,这些测量数据不能反映目标同一时刻的运动状态[4]。因此,要使SMMS包含的各种传感器在动态测量过程中同步工作,必须要给各个传感器提供一个统一的、高精度的时间基准[5]。目前,在大地测量、地上工程测量、航空摄影测量等能接收GNSS卫星信号的测量领域内,多传感器集成系统的测量时间基准一般由高精度的GNSS信号[6]来提供。然而,在地下工程测量[7]、隧道测量等无GNSS卫星信号或弱星环境[8]下的测量领域内,需要找到一个稳定、高精度且受外界环境干扰小的时间基准传感器。
精密晶体振荡器作为重要的频率源在通讯、邮电、电子仪器、航空航天、国防军工等方面具有很广泛的应用[9],是目前来说比较好的能代替GNSS时间基准的时间基准传感器。但是,高精度晶体振荡器提供的时间基准的稳定性和精度仍需要研究,这就需要对高精度晶体振荡器进行性能测试。目前常用的评估晶振频率稳定度的方法为量值传递法[10],该方法需要选用一个比待测晶振频率稳定度高 3 倍以上的频率源作为参考,并且使用高精度的测量设备对待测频率源进行频率测量[11]。无论是高稳定度的频率参考源还是高精度的频率测量设备,其成本都较高,获取不便,对常规测试的应用推广造成了一定的困难[12]。为此,文中设计一个地铁移动测量系统时间基准传感器性能测试平台,利用成本低廉但精度够高的GNSS秒脉冲信号对待测精密晶体振荡器进行性能测试,并分析其在地铁移动测量系统中替代GNSS信号成为时间基准的可行性。
1 时间基准传感器性能测试方法
1.1 地铁移动测量系统时间同步方法
在地铁移动测量系统中,要使各传感器时间同步[13],需要建立一个时间基准平台,通过该平台给系统中其他传感器发送一个脉冲信号以及一个串口时间数据,其中串口时间数据精确到整秒。待目标传感器接收到脉冲信号后,在到达脉冲上升沿(也可设置为下降沿)时,将传感器内部计数器清零并重新计数,并在此时开始工作,从而保证各传感器同步测量。系统工作一段时间之后,由于不同传感器工作周期不同、内部计数器精度不同,时间又会产生误差,此时时间基准平台会再次发送脉冲和串口时间数据进行校准,以保证系统在长时间工作状态下也能同步测量。
1.2 高精度晶振性能测试原理
受时间基准同步原理的启发,将待测晶振看作传感器频率输出源,将GNSS秒脉冲信号看作脉冲信号,利用单片机CPU的计数器功能[14]模拟传感器内部计数器,进而解算出晶振相较于GNSS信号的误差。假设以该单片机CPU的最高频率84 MHz作为计数脉冲,以GNSS秒脉冲1次输出作为时间间隔,采用上升沿中断方式(减少计算机的响应时间),若晶振精度与GNSS秒脉冲信号相当,此时CPU上的计数器应该计数84 000 000次。若精度有差距,设单片机CPU计时器在一次GNSS秒脉冲时间间隔内的计时次数为N。那么在1次GNSS秒脉冲时间间隔内晶体振荡器振荡频率精度与GNSS秒脉冲精度误差S(单位:s)为:
(1)
假如晶体振荡器连续工作Mh,它与GNSS秒脉冲的精度误差累积Sm(单位:s)为:
(2)
1.3 高精度晶振性能测试方法
一般来说,对恒温晶振频率精度和稳定度影响最大的外界因素就是温度[15]。文中利用恒温箱改变测试平台所处外界温度环境,研究温度对恒温晶振频率精度和稳定度的影响。测试在地铁移动测量系统时间基准传感器性能测试平台上进行。该平台由GNSS天线接收器、单片机、接收数据所用计算机以及USR-TCP232-Test串口转换软件组成。其中单片机是由GNSS天线模块、JDWZ25晶振、DOCSC24晶振、单片机CPU以及供电电源等集成,如图1所示。测试前,一定要保证GNSS接收天线位于户外宽敞地带,保证GNSS信号不受干扰。测试时,待测试平台红灯闪烁后打开串口软件,设置好对应参数,开始接收数据。当看到串口数据接收界面有数据显示后,表示测试平台能正常工作。利用温度计记录下当时的室温,然后将输出的数据以文本的形式保存,待实验数据收集完成后,在记录表中记录下实验相关信息,如日期、试验开始时间、结束时间、数据文件号等。
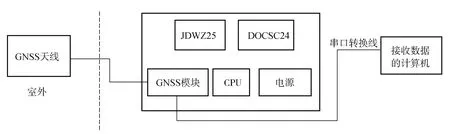
图1 测试平台组成图
1.4 高精度晶振性能评价指标
评估晶体振荡器性能[16]主要从两个方面考虑:一是晶体振荡器振荡频率精度;二是晶体振荡器振荡频率稳定度。前者可以通过计算样本计数值算术平均值与标准值之差,进而计算其与GNSS秒脉冲精度误差来体现;后者可以通过计算样本计数值均方差以及误差分布曲线图来直观表达。
由于GNSS秒脉冲信号的精度要比待测晶体振荡器精度高3个数量级以上,故评估晶体振荡器振荡频率精度只要比较待测晶振精度与GNSS信号精度的接近程度。即比较待测晶振对应的计数值与标准值的差距,记为计数误差D。由式(1)可知,计数误差D与精度误差S的关系为:D越大,S越大,精度误差越大,晶体振荡器精度与GNSS秒脉冲精度相差越大,晶体振荡器精度越低;D越小,S越小,精度误差越小,晶体振荡器精度与GNSS秒脉冲精度相差越小,晶体振荡器精度越高。
评估晶体振荡器振荡频率的稳定度,即评估测试平台在一段时间内输出的计数值是否稳定,可用均方根衡量,即:
(3)

2 实验与分析
一般来说,温度是晶体振荡频率变化的主要因素,为此文中将温度作为自变量来测试晶体振荡器的性能,考察晶体振荡的精度及稳定度,以便选择合适的高精度晶体振荡器。文中采用JDWZ25和DOCSC24两种晶体振荡器,在室温和-30~80 ℃温度环境下进行。-30~80 ℃的环境温度控制采用的是合肥安科环境试验设备有限公司的编程式恒温湿热试验箱,它的温控范围大概在-70~100 ℃,可以满足文中实验要求。
2.1 室内温度环境下晶体振荡的性能
选择室温大致在20~25 ℃范围内,每次测试前通过温度湿度计测量温度,通过平台测试获得两种恒温晶振在室温条件下的大量实验数据,经过数据处理,其结果见表1。

表1 室温条件下两种晶振实验数据处理结果
由表1可以看出:在室温条件下JDWZ25晶振的计数误差要比“DOCSC24晶振小,但JDWZ25晶振的均方差要比DOCSC24晶振大。即在室温条件下,JDWZ25晶振的精度要比DOCSC24晶振稍高,但稳定性稍差。
2.2 -30~80 ℃实验环境下晶体振荡的性能
2.2.1 温度影响整体性能分析比较
图2给出了JDWZ25误差与温度关系图。由图2可以看出:在-20~20 ℃区间内,随着温度的不断升高,JDWZ25恒温晶振的计数误差D不断下降,均方差也大致呈下降趋势,即JDWZ25振荡频率精度和稳定度都在不断提高;而在20~80 ℃区间内,JDWZ25恒温晶振的计数误差D和均方差比较稳定,且数值都保持在很低的水平,即JDWZ25恒温晶振在常温或者高温状态下振荡频率精度很高、稳定性很强,且几乎不受温度影响;而在低温状态下,JDWZ25恒温晶振振荡频率精度和稳定度随温度的降低而降低。
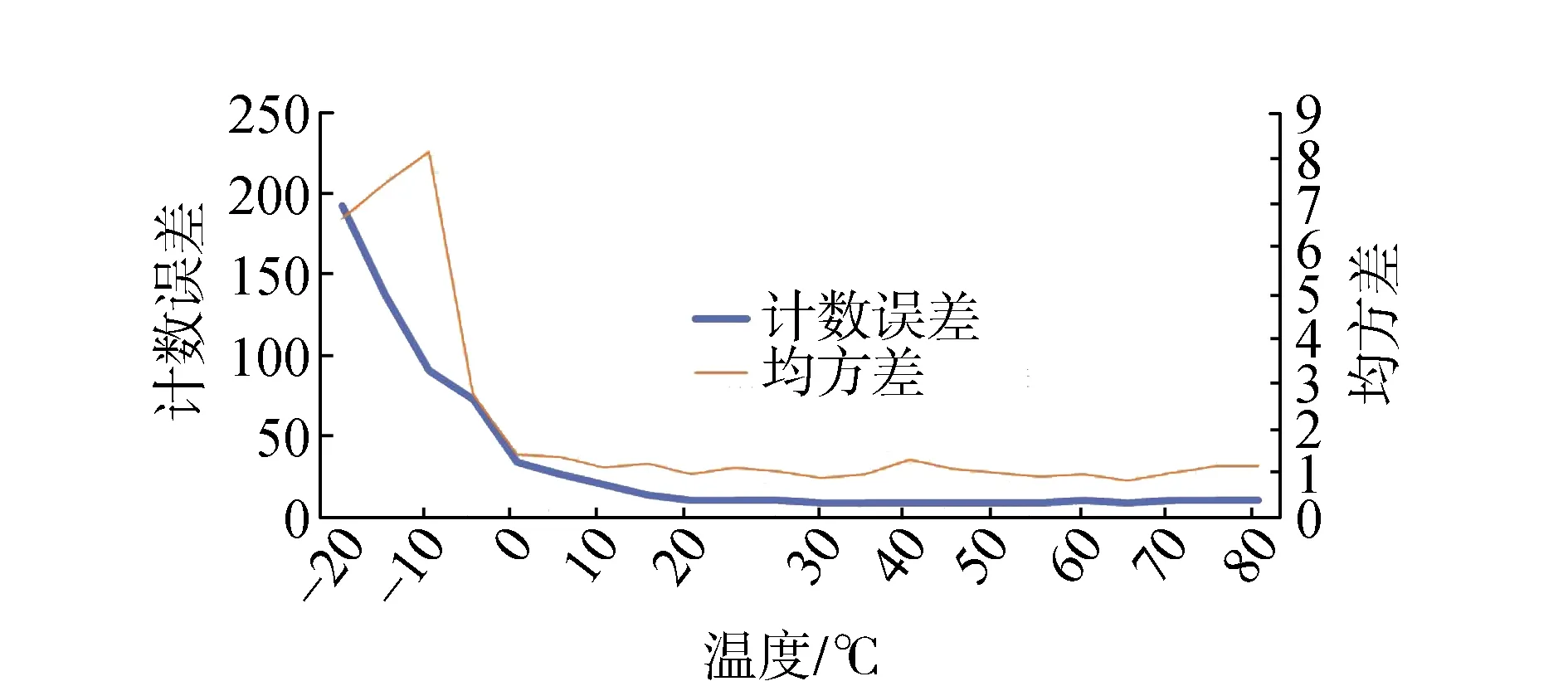
图2 JDWZ25误差与温度关系图
图3给出了DOCSC24误差与温度关系图。由图3可以看出:在-30~80 ℃区间内,随着温度的不断升高,恒温晶振的计数误差D一直保持在50附近,均方差保持在1附近,即DOCSC24恒温晶振无论在低温、常温或者高温状态下振荡频率精度和稳定度都几乎不受温度影响。
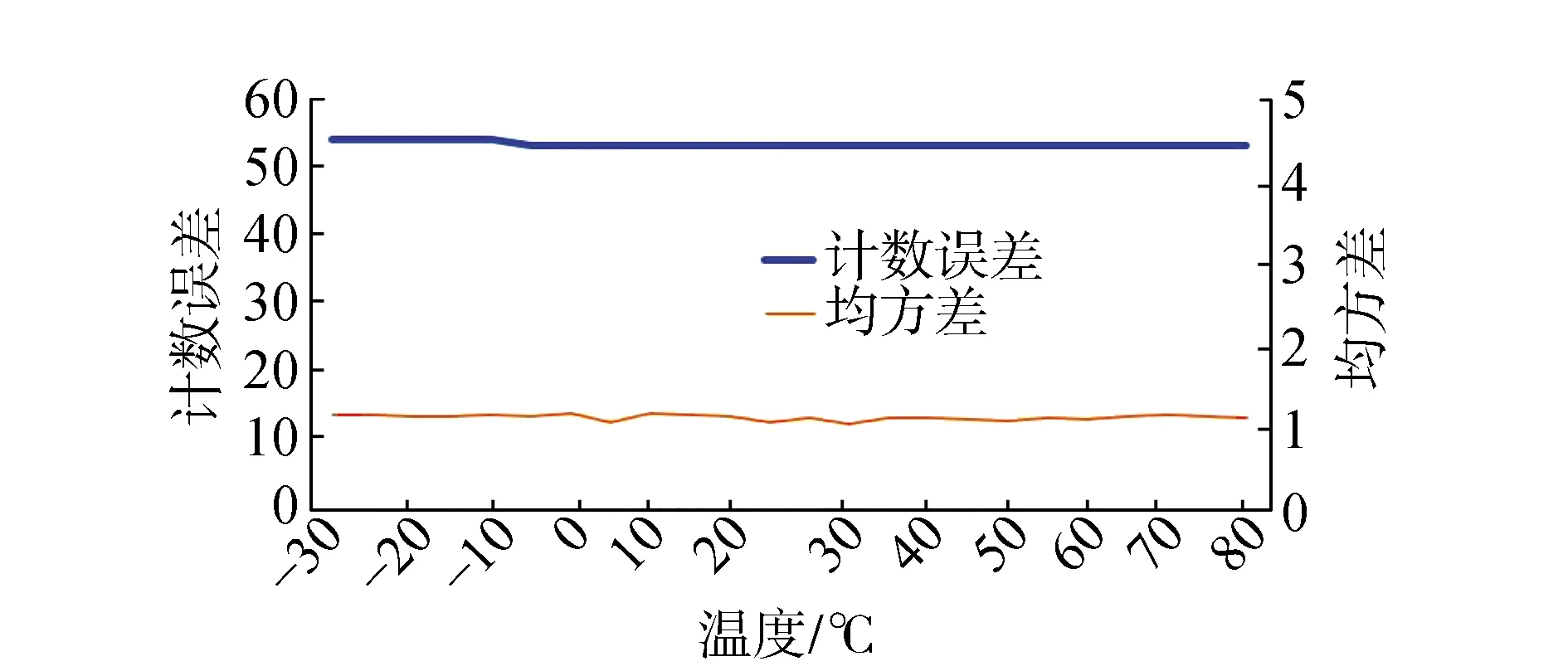
图3 DOCSC24误差与温度关系图
2.2.2 特定温度环境下性能分析比较
为了进一步分析两种晶振器精度和稳定度与温度的关系,选择1个高温点(60 ℃)、1个室温点(20 ℃)、3个低温点(0 ℃、-10 ℃、-20 ℃)进行分析。由于实验的数据样本过大且样本数量无法保持一致,故采用随机抽样分析法,各采样500组数据进行对比分析。
在60 ℃和20 ℃的条件下,DOCSC24晶振的计数误差稳定在数值51附近上下波动,JDWZ25晶振的计数误差稳定在数值11附近上下波动。即JDWZ25的振荡频率精度要比DOCSC24的”振荡频率精度高,见图4、图5。
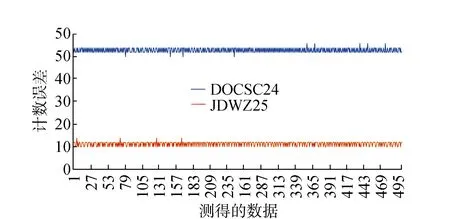
图4 两种晶体在60 ℃时精度误差指标变化图
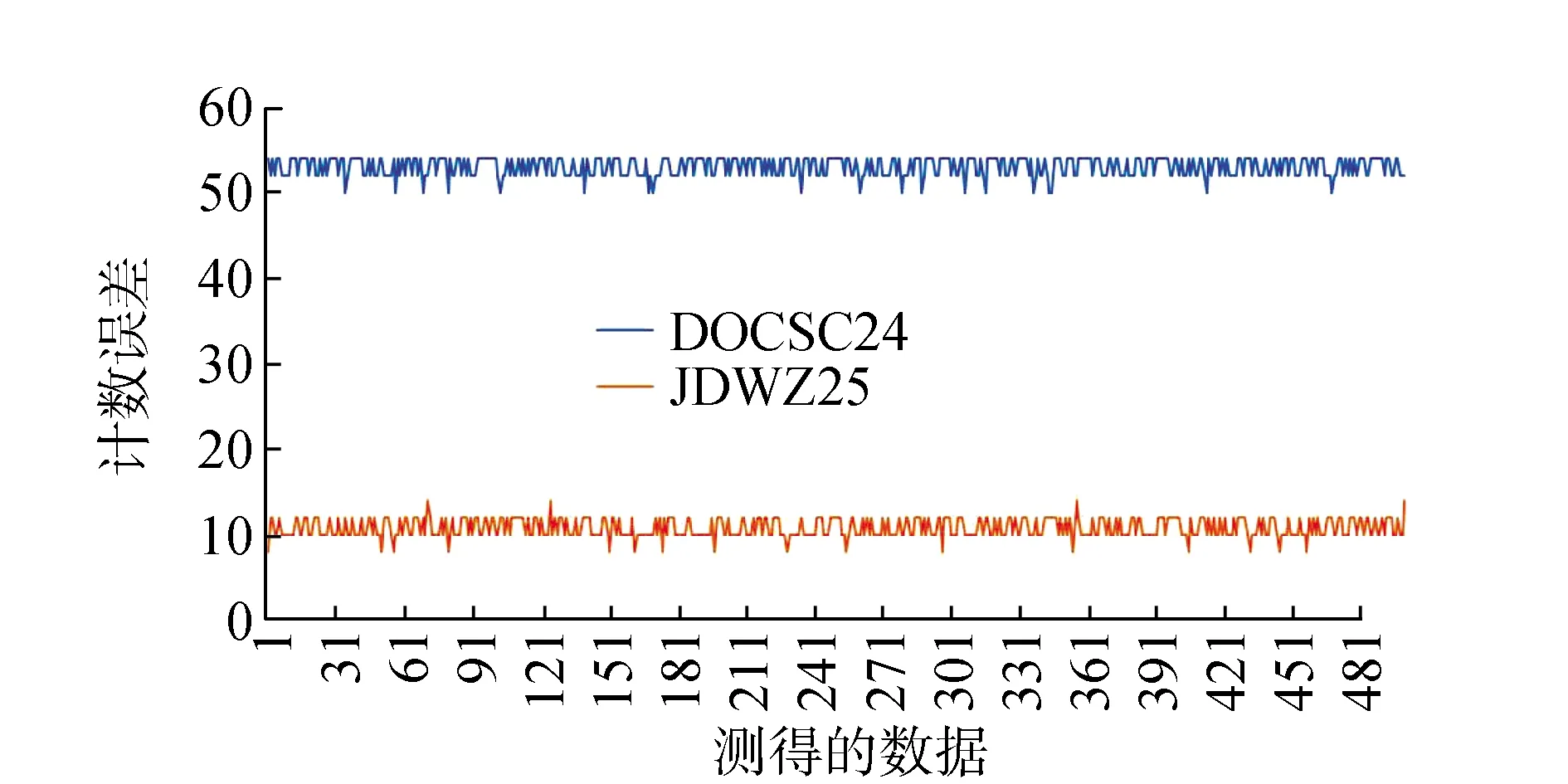
图5 两种晶体在20 ℃时精度误差指标变化图
在温度为0 ℃的条件下,虽然JDWZ25晶振的计数误差还是要比DOCSC24晶振的计数误差小,但是它的计数误差是在30~40之间波动且波动幅度较大。即在0 ℃的条件下,JDWZ25晶振精度比DOCSC24晶振高,但是与在高温和室温条件下相比,精度和稳定度均有较大程度的下滑。DOCSC24晶振还是一如既往的稳定,见图6。

图6 两种晶体在0 ℃时精度误差指标变化图
在低温状态下,JDWZ25的计数误差要比DOCSC24高,且随着温度的降低,二者的差距越来越大,即JDWZ25的振荡频率精度要比DOCSC24的振荡频率精度低,且随着温度的降低,JDWZ25的振荡频率精度越来越差,而DOCSC24的振荡频率精度则几乎保持不变,见图7、图8。
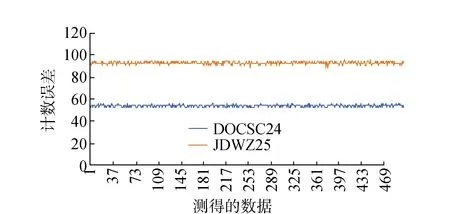
图7 两种晶体在-10 ℃时精度误差指标变化图

图8 两种晶体在-20 ℃时精度误差指标变化图
2.3 综合分析
上面的实验结果表明:JDWZ25恒温晶振的振荡频率精度在低温状态下受温度影响较大,精度低于DOCSC24;在高温状态下,几乎不受温度影响,精度高于DOCSC24。而DOCSC24 恒温晶振的振荡频率精度受温度影响不大。综合稳定性和精度两方面,在低温状态下稳定性很差的JDWZ25 恒温晶振显然不适合作为地铁移动测量系统的时间基准提供者,而稳定性很好的DOCSC24恒温晶振在精度方面能否满足高精度测量的要求,还需对它进一步评估。
根据式(2)可知,晶体振荡器连续工作Mh,它与GNSS秒脉冲的精度误差累积为Sm(单位:s),设人推测量车的运动速度为V(单位:m/s),那么晶振工作Mh与GNSS的误差X(单位:m)为:
X=Sm×V.
(4)
考虑晶体振荡器连续工作1 h,M=1,推车以1 m/s速度前进,取V=1 m/s,计算可得DOCSC24恒温晶振在工作1 h之后与GNSS工作1 h的时间误差以及地铁移动测量系统工作1 h后各个传感器测量同一目标位置误差,见表2。
由表2可以看出:DOCSC24恒温晶振在1 h内,地铁移动测量系统各个传感器测量同一目标与GNSS作为时间基准误差在2.27~2.31 mm左右,属于可以接受的范围。同时,DOCSC24恒温晶振受温度影响很小,符合稳定性要求,因此DOCSC24恒温晶振是可以作为地铁移动测量系统的时间基准的。

表2 不同温度条件下DOCSC24测量误差表
3 结 论
文中设计了一个地铁移动测量系统时间基准传感器性能测试平台。通过JDWZ25和DOCSC24两种高精度晶振性能测试结果表明:JDWZ25晶振在高温、室温状态下精度和稳定度都表现得十分优良,但在低温状态时,精度和稳定度随温度的降低剧烈变化,总体呈下降趋势;DOCSC24晶振在高、室、低温状态下都表现得十分稳定,受温度因素影响很小。且以DOCSC24晶振为时间基准,地铁移动测量系统各个传感器测量同一目标与GNSS作为时间基准误差在2.27~2.31 mm/h左右,属于可接受的范围。对比两种晶振,DOCSC24晶振可以作为地铁移动测量系统的时间基准。
猜你喜欢
宇航计测技术(2021年3期)2021-08-17
辽宁科技学院学报(2021年3期)2021-07-01
科学与信息化(2021年4期)2021-02-26
河北农机(2020年10期)2020-12-14
电子制作(2018年9期)2018-08-04
大陆桥视野·下(2017年11期)2017-10-31
电子技术与软件工程(2017年14期)2017-09-08
电子制作(2017年24期)2017-02-02
电子产品世界(2016年1期)2016-03-07
科技传播(2015年19期)2015-03-25
