基于SAR图像的水下运动目标探测方法
2022-04-06 04:23吕俊阳彭冬亮
杭州电子科技大学学报(自然科学版) 2022年2期
吕俊阳,李 焘,彭冬亮
(杭州电子科技大学自动化学院,浙江 杭州 310018)
0 引 言
潜艇等水下强大战略武器具有行动隐蔽、机动性高、攻击力强等特点,具有很强的威慑力,因此水下目标的探测感知是现代综合海战的重要技术。潜航体在水下航行时,引起海水跃层运动从而形成内波,内波传至海面形成Bernoulli水丘、Kelvin尾迹,并引起海水自由表面附近的流场分布变化。潜航体处于潜望状态时,还会产生湍流尾迹。目前,潜航体在运动中无法隐藏痕迹[1],其尾迹还携带航向、航速等信息[2-3],为水下目标的探测提供了重要的技术手段。
通过红外、光学遥感和雷达等多种手段可以观测到尾迹。相较于红外、光学遥感,合成孔径雷达(Synthetic Aperture Radar, SAR)具有全天时、全天候、远距离、穿透力强、载体多等特点,在海洋检测和军事等领域具有独特的优势。自1978年美国的SEASAT卫星成功捕捉到内波尾迹图像[4]以来,基于SAR图像的尾迹检测研究相继展开[5-6]。根据理论分析,水下运动目标对应的海面波纹主要是Kelvin尾迹和不明显的Bernoulli水丘,但目前没有公开的相关SAR图像数据。由于水下运动目标和海面舰船所形成的Kelvin尾迹在形成原理和波纹特征等方面具有许多相似点,所以,本文提出一种基于运动目标尾迹波纹增强的局部恒虚警率(Constant False Alarm Rate, CFAR)检测方法,先对舰船尾迹的SAR图像进行验证,再仿真不同条件下水下运动目标的海面特征波纹SAR图像,对仿真图像的海表面特征波纹进行检测和验证。
1 水下运动目标海表面特征波纹的仿真
水下运动目标在海表面产生的尾迹波纹一般由2部分叠加而成,一是运动目标在水下产生扰动传至海面产生的尾迹波纹,二是风力作用下的海面波纹。在得到尾迹和海表面叠加的复合波纹后,计算其散射系数,再根据海浪运动对散射系数的分布进行调制,从而得到尾迹的仿真SAR图像。
1.1 Kelvin尾迹动力学模型
水下运动目标以潜航体为模型,潜航体的Kelvin尾迹模型是关于航行速度、潜深以及航体外形的函数。假设潜航体在深度h处以均速v向x轴方向航行,若考虑海水的粘滞效应和航体长度的影响,得到Kelvin尾迹的波高函数[7]为:
ζ(x,y)=ζ0(x+l,y)+Cζ0(x-l,y)+ζ1(x+l,y)-Cζ1(x-l,y)
(1)
式中,粘滞系数C=0.6,ζ0(x,y)和ζ1(x,y)表达式如下:
(2)
(3)
式中,h(x,y)=k0sec2φ(xcosφ+ysinφ),l,b,d分别为航体的半长、半宽和吃水深度,h为下潜深度,k0=g/v2为横断波波数,g为重力加速度,φ为波相对于x轴的传播方向。
1.2 海表面物理建模和电磁散射建模
假设在某时刻t,水平坐标r=(x,y)处,通过线性滤波法生成的海面高度z=H(r,t)[8]为:
(4)
式中,FI[·]为逆傅里叶变换,k为波数矢量,频域复幅度A(k,t)为:
(5)
式中,k=(kx,ky)=(pxdkx,pydky),kx和ky分别为k在x和y方向上的投影,px和py分别为x和y方向上的离散点数;离散面元尺度dkx=2π/Lx,dky=2π/Ly;Lx和Ly为海面尺寸;γ(k)为均值为0方差为1的复高斯随机序列;S(k)为二维海谱,本文采用广泛应用的经验谱PM谱[9];ω为波浪传播圆频率,j为虚数单位。
将Kelvin尾迹和海面高度叠加得到含有运动目标的海面物理模型,并采用双尺度面元模型[10]计算复合海表面的雷达后向散射系数,将海面视为大尺度结构的重力波以及小尺度结构的毛细波组成的复合结构,则海面电磁散射就可近似为大尺度重力波支配的镜像散射和小尺度张力波支配的布拉格(Bragg)散射共同作用结果,具体地,镜像散射使用基尔霍夫近似模型(KA法)计算散射系数[11],Bragg散射使用微扰法计算散射系数[10]。
1.3 基于调制机理生成混合海表面SAR图像

(6)

2 基于运动目标尾迹波纹增强的局部CFAR检测方法
2.1 尾迹波纹增强预处理
目标在水下运动传至水面的波纹波高幅度较小、易受海况条件的影响,因此,在SAR图像中,波纹呈现的对比度较小,所以需要对尾迹波纹进行增强。尾迹SAR图像中海面回波强度的随机变化使得海面具有近似低秩属性,而目标尾迹具有较强的稀疏特性,因此可以采用鲁棒性主成分分析(Robust Principal Component Analysis, RPCA)算法将SAR图像分解为低秩图像、噪声图像(两者之和对应海面)和稀疏图像(对应尾迹)的和,从而同时实现目标增强和杂波抑制。
在比较宽松的条件下,RPCA算法能够以很高的概率从观测数据矩阵M中准确地恢复低秩矩阵L和稀疏矩阵S,在噪声条件下,可视为求解以下凸优化问题:
(7)

(8)
求解式(8)的方法是交替实现下面2个子问题的最小化:
(9)
(10)
子问题(9)的求解可以通过计算M-Si的局部奇异值分解实现,子问题(10)的解是软阈值函数shrink(M-Li+1,λ)的计算结果,其中软阈值函数的定义如下:
shrink(x,ε)=sign(x)max{0,|x|-ε}
(11)
式中,ε为一个极小的正数。
2.2 基于归一化灰度Hough变换的局部CFAR尾迹检测算法
目标在水下航行时的扰动传至海面形成的波纹主要包括Kelvin尾迹和Bernoulli水丘,如图1所示。一般情况下,Bernoulli水丘不明显,所以利用Kelvin尾迹对目标进行有效检测和定位[14]。海况良好时,Kelvin尾迹可以延长十多公里,存在数小时[15]。Kelvin尾迹属于长重力波,由分散波和横波组成,在SAR图中通常呈单臂或双臂的线性特征。因此,采用线性特征检测方法可以对水下目标进行有效探测和追踪[16]。
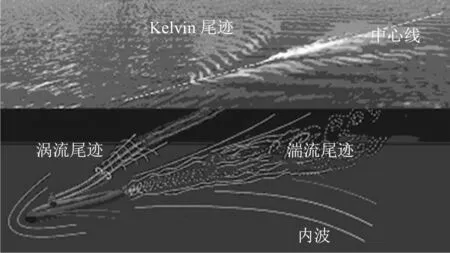
图1 水下目标运动形成的海面波纹
Hough变换最初是针对二值图像提出的检测直线的手段,若要采用Hough变换对SAR图像检测尾迹,需先对图像进行二值化处理,但尾迹在SAR图像中表现形式或明或暗,通常难以自适应确定用于二值化处理的阈值,因此,种劲松等[17]提出归一化灰度Hough变换,将像素灰度统计加入参数空间,引入直线长度统计用于参数空间的归一化,解决了不同直线对Hough变换空间贡献不均匀的问题。但是,在进行Hough变换之前,文献[17]方法需要先检测出舰船目标所在区域并对其进行掩膜处理,从而降低舰船区域对尾迹检测的影响,这与利用尾迹来检测目标相违背;另外,在水下目标场景应用文献[17]方法进行尾迹检测得到的参数空间对比度低,难以检测峰值和谷值。针对上述问题,本文将CFAR检测的思想应用于灰度归一化Hough变换的参数空间检测峰值和谷值点,提出一种基于归一化灰度Hough变换的局部CFAR尾迹检测算法,特征波纹检测方法步骤如下:
(1)输入待检测的SAR图像,尺寸为M×N,采用RPCA算法对原始SAR图像进行低秩稀疏分解;

(4)尾迹在SAR图像中表现为或明或暗的线性结构特征,分别对应归一化灰度Hough参数空间中的峰值和谷值位置。设定虚警概率pfa,根据T=σ0Φ-1(1-pfa)+μ0计算得到CFAR检测门限T,其中Φ为标准正态分布函数,将检测统计量Ts分别与检测阈值T比较,若Ts(p,q)>T,则对应峰值,若Ts(p,q)<-T,则对应谷值,从而得到峰值和谷值检测结果;
(6)将W条尾迹对应的Hough参数空间位置反演到图像域,并标注在原始SAR图像中。
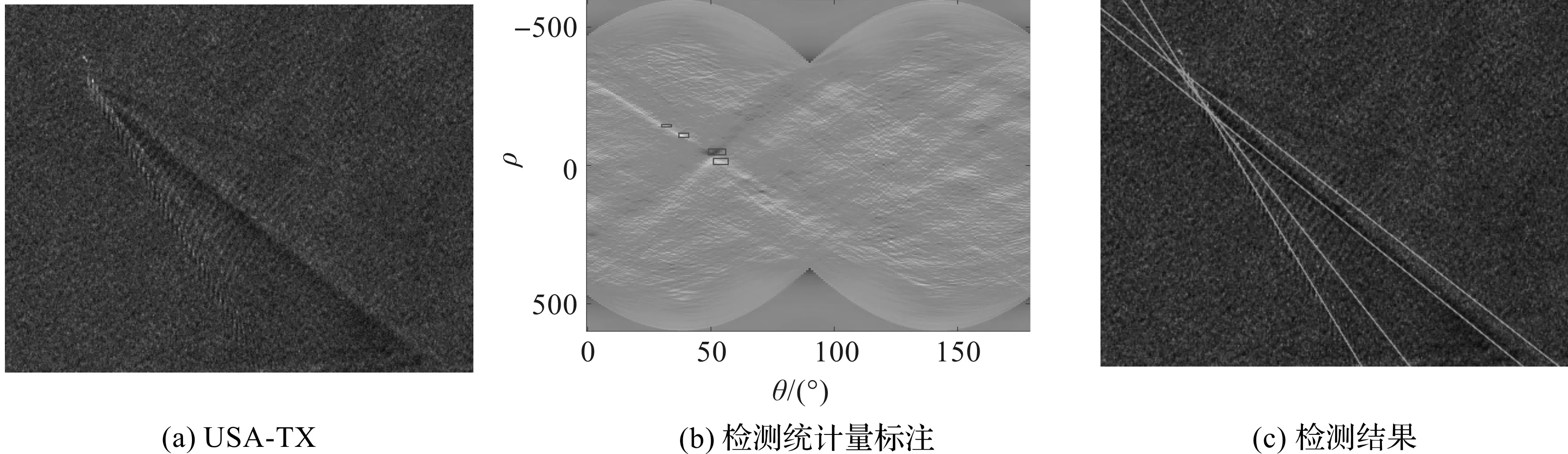
图2 USA-TX舰船尾迹SAR图及检测标注结果
3 运动目标尾迹检测实验结果与分析
3.1 舰船尾迹仿真及检测
为与真实SAR图像对比,仿真舰船尾迹SAR图像并进行尾迹检测。关键参数设置潜深为0 m,航速为5 m/s,航向为45°;海面19.5 m处风速为5 m/s,风向为45°,海面尺寸为256×256像素;SAR系统载频为1 GHz,雷达波束入射角为30°,仿真SAR图像如图3(a)所示。第1次实验选取参数pfa=1×10-3,Amin=13,检测结果如图3(b)所示,可以看出,与真实舰船尾迹SAR图像检测结果一致,没有虚警,验证了仿真方法的有效性,说明仿真SAR图像可以用于本文方法的验证。第2次实验提高了虚警率,将参数设置为pfa=2.5×10-2,检测结果如图3(c)所示,可以看出有虚警。第3次实验降低虚警率则无法检测出尾迹,所以本文方法可以实现恒虚警检测。
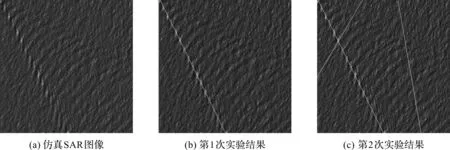
图3 舰船尾迹仿真SAR图像及不同参数的实验结果
3.2 水下运动目标尾迹仿真及检测
以潜航体为模型,选取潜航体参数如下:宽为12.8 m,长为170 m,高为10.8 m;海面风向为45°,海面区域尺寸设置为1 200×1 200,尾迹区域设置为8 00×8 00;SAR系统参数不变。海面风速为5 m/s,潜深为5 m,航速为20节的目标尾迹波纹SAR图像记作jk_u5_h5_v20,海面风速为7 m/s,潜深为10 m,航速为25节的目标尾迹波纹SAR图像记作jk_u7_h10_v25,海面风速为9 m/s,潜深为5 m,航速为30节的目标尾迹波纹SAR图像记作jk_u9_h5_v30。分别采用本文方法、文献[17]的方法和Radon变换法进行检测,检测结果如图4所示。对于2张潜深为5 m的仿真SAR图像,取参数pfa=2×10-2,Amin=13,采用本文方法都检测到2条Kelvin尾迹;对于潜深为10 m的仿真SAR图像,调整检测参数后,也能检测到2条Kelvin尾迹,但是,其他2种方法均不能有效检测到真实的尾迹波纹。
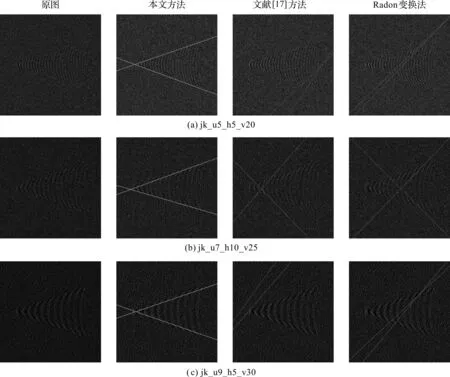
图4 不同方法的检测标注结果
采用3种检测方法得到的jk_u5_h5_v20图像检测结果的参数空间图如图5所示。可以看出,图5(a)中尾迹特征明显,图5(b)和(c)尾迹特征不明显,说明本文方法可以有效增强尾迹特征在变换域的对比度,提高尾迹检测精度。

图5 不同方法对jk_u5_h5_v20的尾迹检测空间图
设置潜航体航速为25节,潜深分别为5 m,10 m和15 m,对应的海面波高模型如图6所示。从图6可以看出,潜深越深,水下波动传至水面的能量损失越大,尾迹波纹越不明显,同理海况越差、目标航速越低,尾迹波纹也越不明显。所以潜深为10 m的尾迹波纹需要通过调整检测参数pfa和Amin来实现尾迹波纹检测。采用控制变量法检验潜深/航速/风速对检测性能的影响,约定风速5m/s为海况良好,航速30节为高航速,潜深5m为低潜深。分别模拟3种情况进行实验,分别为风速5 m/s、潜深15 m及航速30节;风速5 m/s、潜深5 m航速及15节;风速13 m/s、潜深5 m及航速30节,检测结果表明,3种情况都无法检测到真实尾迹。说明本文方法存在一定的极限性,目标在潜深深于15 m时,即使高航速海况良好也无法检测到真实尾迹;航速低于15节时,即使低潜深海况良好也无法检测到真实尾迹;海面风速高于13 m/s时,即使低潜深高航速也无法检测到真实尾迹。
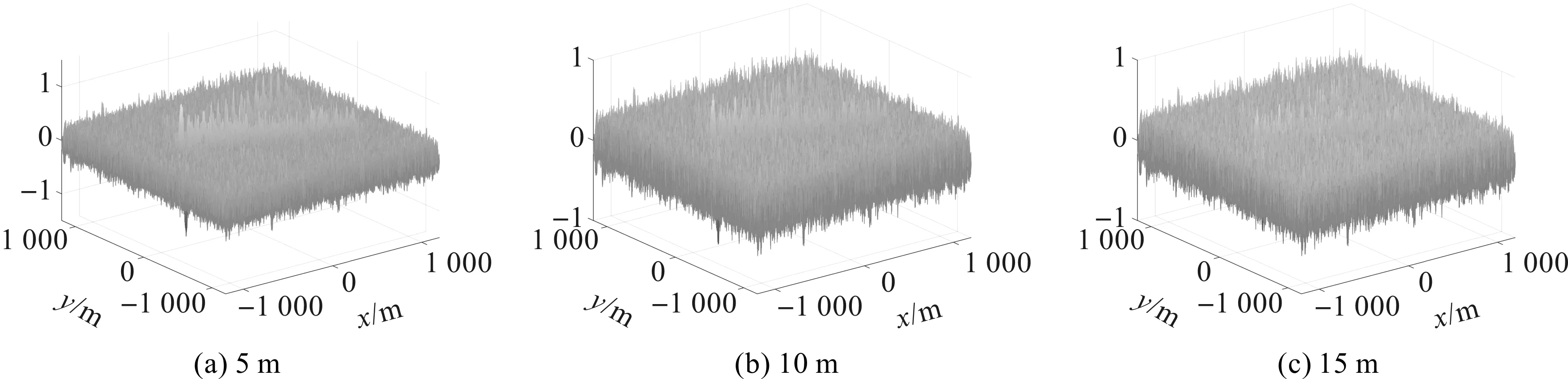
图6 不同潜深的波高模型
4 结束语
在水下目标检测数据匮乏的情况下,本文通过实验研究了基于SAR图像表面特征波纹的水下运动尾迹特征,提出一种基于运动目标尾迹波纹增强的局部CFAR检测方法。所提方法不需要预先对目标区域做掩膜处理,增强了水下目标尾迹波纹特征在变换特征空间中的对比度,提高了尾迹的检测精度。从数据集构建和增强的角度看,本文实验使用的仿真方法可用于扩充水下运动目标海面SAR图像数据集。但是,水下目标的探测受诸多因素的影响,检测性能与成像质量密切相关,仅针对线性尾迹特征进行检测难度很大,因此,本文提出的方法还需要在实际应用中不断验证和改进。
猜你喜欢
水上消防(2022年1期)2022-06-16
北京航空航天大学学报(2021年6期)2021-07-20
红蜻蜓(2021年2期)2021-07-20
阅读(低年级)(2021年10期)2021-03-08
海洋开发与管理(2020年2期)2020-09-10
小学科学(2020年6期)2020-06-22
辽河(2019年7期)2019-09-03
广东造船(2016年3期)2016-07-13
中国水运(2014年12期)2015-01-09
小星星·阅读100分(低年级)(2009年12期)2009-01-25