
星载氢钟VLBI观测实验及分析*
2022-04-02 08:34:40王志超刘庆会谢勇辉蒋健华张王玲玲
天文学报 2022年2期
王志超 刘庆会 郑 鑫 张 娟 谢勇辉 邓 涛 蒋健华张 超 王玲玲 梁 悦
(1 中国科学院上海天文台 上海 200030)
(2 中国科学院大学 北京 100049)
1 引言
VLBI (Very Long Baseline Interferometer)技术在测角方面具有很高的测量精度[1], 和测速、测距技术一起被广泛应用于深空探测器精密测定轨,我国VLBI网由北京测站(Bj)、上海佘山测站(Sh)、上海天马测站(Tm)、昆明测站(Km)、乌鲁木齐测站(Ur)和上海VLBI数据处理中心组成. VLBI的分辨率与其基线长度成正比关系, 同等条件下基线越长分辨率越高. 地基VLBI测站由于受限于地球自身物理尺寸, 基线最大长度只能达到地球直径. 因此脱离地球自身大小的限制, 将基线延伸到地球以外的空间, 发展空间VLBI是未来VLBI技术发展的必经之路, 也是VLBI技术自然而然的发展结果.
国际上, 美国曾于上世纪80年代首次通过TDRSS (Tracking and Data Relay Satellite System)卫星与分别位于澳大利亚和日本的两台64 m射电望远镜组成空间VLBI网, 建立了一条长达1.4倍地球直径的基线, 并成功开展射电源观测实验, 证实了空间VLBI技术的可行性[2]. 随后, 日本于1997年2月发射了VLBI卫星HALCA (Highly Advanced Laboratory for Communications and Astronomy), 并成功开展了VSOP (VLBI Space Observatory Programme)项目研究[3–5]. 最近十年, 俄罗斯于2011年发射空间射电望远镜Radio-Astron, 成功开展了空间VLBI科学观测, 并取得了一系列重要科研成果[6–8]. 目前, 国际上已没有在轨工作的空间VLBI卫星. VSOP和RadioAstron作为绕地球轨道空间VLBI卫星, 都已结束在轨工作.
中国计划在2025年左右发射嫦娥七号探测器.嫦娥七号绕月飞行的中继星将搭载4.2 m的可展开天线, 并通过配备VLBI专用设备, 建立人类历史上第1个月球轨道VLBI台站. 通过与现有的中国VLBI地面测站相结合, 组成地月超长基线. 将我国现有的基线长度从3200 km扩展到380000 km,将大幅提高我国VLBI网的深空探测定轨定位精度和天体物理及天体测量研究能力.
中国月球轨道VLBI测站将是中国首个空间VLBI测站, 很多关键性技术需要在地面系统性地测试验证. 中国月球轨道VLBI台站主要由一个4.2 m的可展开天线、致冷接收机、数据采集终端、星载氢钟等组成[9]. 氢钟作为时间频率基准, 其性能直接影响月球VLBI时延的测量精度. 相比于月球轨道VLBI测站, 中国VLBI网地面测站, 目前使用的都是性能优于被动型星载氢钟的主动型地面氢钟. 由于月球VLBI使用的质量较小的被动型星载氢钟未曾用于VLBI观测, 需要验证其可行性. 为此, 我们交替使用主动型地面氢钟和被动型星载氢钟, 利用上海天文台佘山25 m射电望远镜和其他测站对天问一号探测器和射电源进行了观测验证. 通过分析比对不同类型氢钟的射电源时延误差、探测器时延误差, 最终得出了星载氢钟满足深空探测VLBI测定轨精度要求的结论, 验证了星载氢钟作为月球VLBI测站频率基准的可行性.
2 被动型星载氢钟和主动型地面氢钟
被动型星载氢钟利用基态氢原子的超精细能级跃迁信号实现高精度频率输出, 具有频率稳定度高、频率漂移率低、体积较小、重量较轻等优点.已经在我国的北斗系统中得到了广泛的应用[10].本次实验所使用的被动型星载氢钟, 是由上海天文台氢钟团队针对月球VLBI系统的实际需求研发的一款小型被动型氢钟. 该氢钟被用于此次的月球VLBI地面实验系统氢钟对比试验中, 以验证被动型星载氢钟在VLBI观测的可行性.
主动型地面氢钟具有极好的短期和中长期频率稳定度[11], 目前作为地面频率基准广泛应用于中国VLBI网各个台站. 但由于主动型地面氢钟体积、质量大等原因, 难以实现卫星搭载. 本次试验中, 用于比对的主动型地面氢钟是上海天文台于本世纪初从美国购买的一台主动型地面氢钟(MHM-2010). 该款进口氢钟参加过国际VLBI联测以及探月工程嫦娥一号、二号、三号、四号、五号等VLBI测定轨任务, 满足历次探测器的定轨定位对频标稳定性的要求. 两款氢钟的性能指标对比见表1. 从表中可以看出, 此次实验的主动型地面氢钟在频率稳定度性能上优于被动型星载氢钟约一个数量级. 但在体积和质量方面, 被动型星载氢钟比主动型地面氢钟更轻巧.
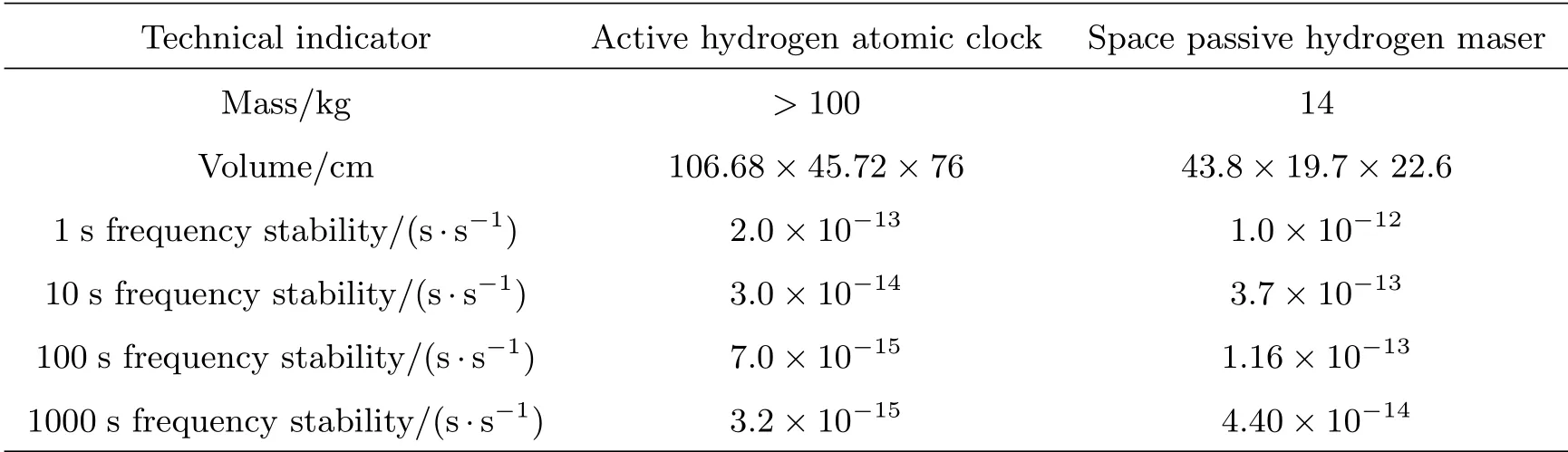
表1 主动型地面氢钟和被动型星载氢钟主要技术指标对比Table 1 The comparison of main technical indicators between active hydrogen atomic clock and space passive hydrogen maser
3 实验步骤
本次实验期间, 中国VLBI网在执行天问一号VLBI测定轨任务, 天马站、北京站、昆明站、乌鲁木齐站参加观测. 根据实验目的, 为了不影响天问一号测定轨任务以及确保实验中氢钟以外其他观测设备的一致性, 本次月球VLBI地面实验在未参加天问一号观测任务的上海佘山25 m测站展开,并建立相应的测试实验环境. 实验系统如图1所示,25 m天线接收到探测器信号和射电源信号, 通过馈源网络将电磁波转换为射频电信号后, 电信号被传递到致冷接收机系统. 经过致冷接收机下变频、滤波等一系列处理后信号变为中频信号, 再传递到数据采集系统进行采样等处理, 最后将数据实时传输到上海VLBI数据处理中心[12]. 其中,氢钟作为接收系统变频器的本振信号和数据采集终端时钟信号的基准, 实验中通过转换信号接口实现不同类型氢钟之间的切换. 天问一号观测时, 使用的是差分VLBI技术, 即交替观测河外射电源和探测器[13]. 具体实验安排设置如表2所示,2021年2月26日,UTC时间6点至8点,在佘山测站首先使用主动型地面氢钟作为时间频率标准对天问一号和射电源进行2 h的观测, 之后待天线调整时,通过转换信号接口将频标由主动型地面氢钟更改为被动型星载氢钟. UTC时间8点至10点, 使用被动型星载氢钟作为频率标准继续观测天问一号和射电源2 h. 2021年2月28日, UTC时间10点至12点,先使用主动型地面氢钟作为时间频率标准对天问一号和射电源进行观测2 h. UTC时间12点至14 点,改用被动型星载氢钟作为频率标准继续观测天问一号和射电源2 h. 整个实验过程中, 实验设备只更改了氢钟.
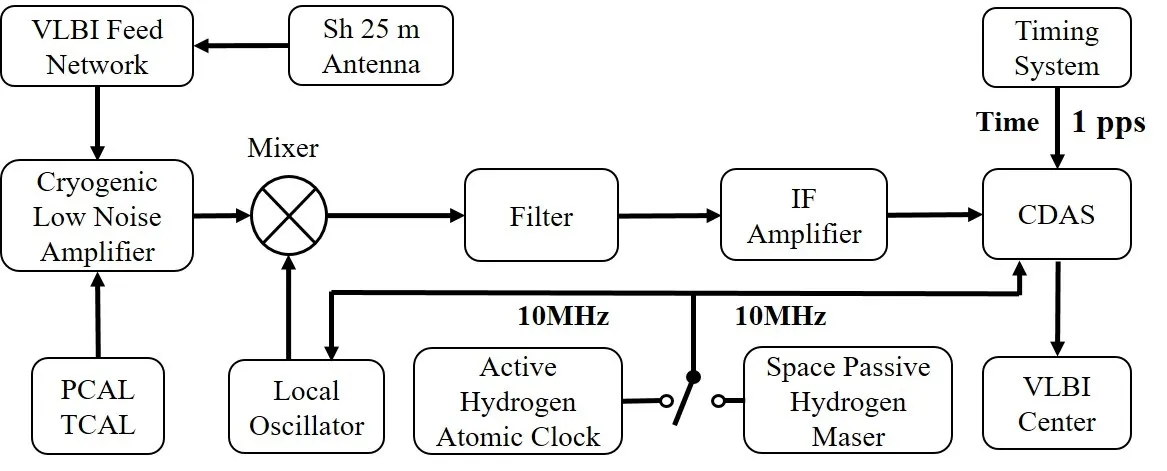
图1 星载氢钟VLBI观测实验系统Fig.1 Experimental system for VLBI observation of space passive hydrogen maser
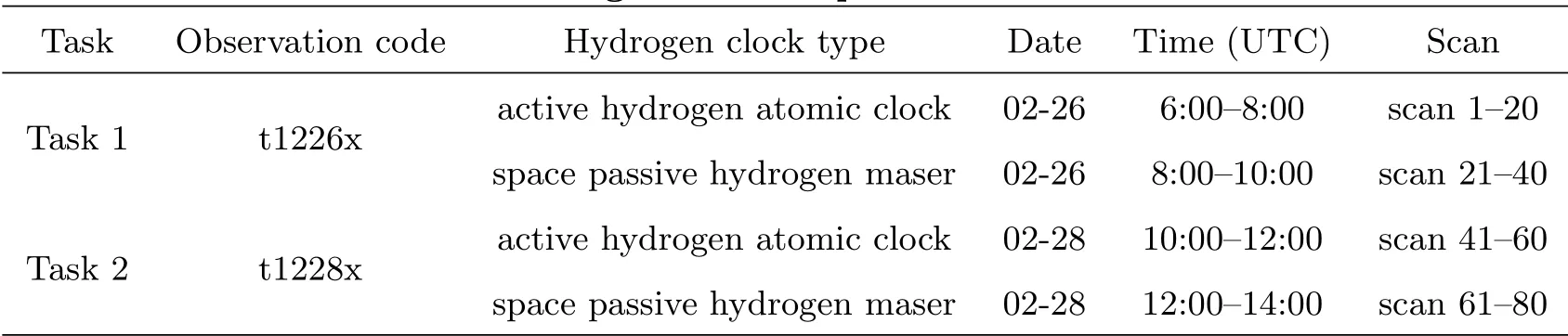
表2 不同时间实验安排情况Table 2 The arrangement of experiments at different time
4 数据结果分析
由于2 d的实验观测过程中, VLBI观测的参考射电源均为0306+102, 所以观测数据变化和射电源无直接关系. 使用后处理软件处理数据, 比对分析同一条基线使用不同氢钟作为频标, 分别对射电源观测误差、探测器观测误差以及综合观测误差结果的影响, 能直接验证星载氢钟是否满足深空探测器的VLBI测定轨要求, 进而验证被动型星载氢钟作为月球VLBI系统频标的可行性. 其中,北京测站、昆明测站、乌鲁木齐测站、天马测站正常使用主动型地面氢钟进行观测, 这4个测站相互间组成与佘山测站无关的6条基线的残余群时延数据, 将作为参照数据, 用来比对被动型星载氢钟VLBI实验数据的质量. 实验过程中, 2月26日,探测器第1个观测弧段scan2, 使用的是非0306+102射电源来校正, 因此数据处理过程中弃用该观测弧段数据. 2月26日, 观测射电源弧段scan21, 使用主动型地面氢钟作为频率标准, 与探测器观测弧段scan22使用氢钟类型不一致, 因此弃用探测器scan22弧段数据. 同理, 2月28日, 探测器的观测弧段scan42和scan62均与校正射电源使用不同类型氢钟, 故弃用该段观测数据. 本实验分析数据均为天问一号火星探测器残余群时延数据.
4.1 Scan间射电源时延测量误差
天问一号探测器的观测是30 s观测数据输出一个观测时延值(30 s积分). 每个观测弧段(scan)在3–5 min不等, 具体时间由观测纲要设计而定. 射电源的观测是300 s观测数据输出一个相位积分点.由于整个观测过程只得到9个射电源积分点, 无法通过射电源scan间数据来反映射电源的观测精度.因此, 我们通过比较将单个scan内探测器残余群时延值(去掉野值点)减去2 h内探测器的所有scan残余群时延的平均值(去掉野值点)来间接反映射电源时延的观测精度. 根据观测实验数据, 利用后处理软件, 本文对两种氢钟的VLBI观测数据进行分析,结果如图2所示. 佘山测站和其他3个VLBI测站组成的Sh-Bj、Sh-Km、Sh-Ur 3条基线的残余群时延的标准差及平均值如表3所示. 从总体上来说, 使用被动型星载氢钟和主动型地面氢钟相比, 残余群时延误差略大, 但基本处于同等水平. 如2月26日,被动型星载氢钟的误差0.195 ns略大于主动型地面氢钟的0.132 ns. 2月28日, 被动型星载氢钟的误差0.124 ns和主动型地面氢钟的0.088 ns基本相当.
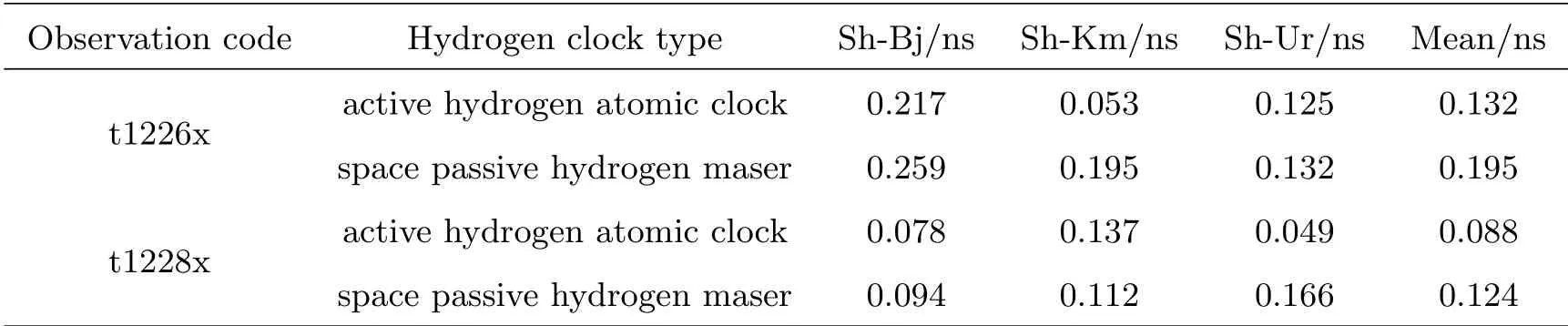
表3 射电源残余群时延的标准差Table 3 The standard deviation of residual group delay of radio source
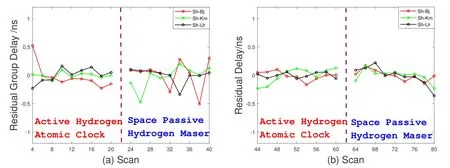
图2 不同基线射电源残余群时延单个scan值减去2 h内所有scan的平均值. (a) t1226x结果; (b) t1228x结果.Fig.2 The average of residual group delay of radio source of single scan at different baselines minus the average of all scans over a 2-hour period. (a) result for t1226x; (b) result for t1228x.
4.2 Scan内探测器残余群时延误差
根据观测实验数据, 同样利用后处理软件, 对两种氢钟的天问一号探测器VLBI残余群时延进行分析. 将单个scan内的所有30 s积分点的残余群时延值(去掉野值点)减去单个scan的平均值(去掉野值点), 结果如图3所示. 观察基线(Sh-Bj、Sh-Km、Sh-Ur)和参考基线(Bj-Tm、Km-Tm、Ur-Tm)的数据结果, 可以发现2月26日8点至10点, 无论是使用被动型星载氢钟的基线(Sh-Bj、Sh-Km、Sh-Ur), 还是使用主动型地面氢钟的参考基线(Bj-Tm、Km-Tm、Ur-Tm), 残余群时延的波动相较6点至8点的残余群时延都较大. 主动型地面氢钟的残余群时延在1 ns范围内波动, 被动型星载氢钟的残余群时延在1.2 ns以内波动. 由于天马测站的天线性能本身要优于佘山测站天线, 因此数据波动情况不能直接反映氢钟观测性能差异. 与此同时, 2月26日8点至10点的其他3条使用主动型地面氢钟的参考基线(Bj-Km、Km-Ur、Bj-Ur)的残余群时延数据同样存在较大波动. 据此认为, 存在测站天气异常、天问一号信号本身变弱等其他因素引起了这个时段残余群时延的较大波动, 并不仅仅是被动型星载氢钟引起的. 2月28日, 被动型星载氢钟与主动型地面氢钟的残余群时延波动相对一致,基本都在0.04 ns内波动. 由此可知, 无论是使用被动型星载氢钟还是主动型地面氢钟作为频标, 对探测器时延测量误差的影响相近.
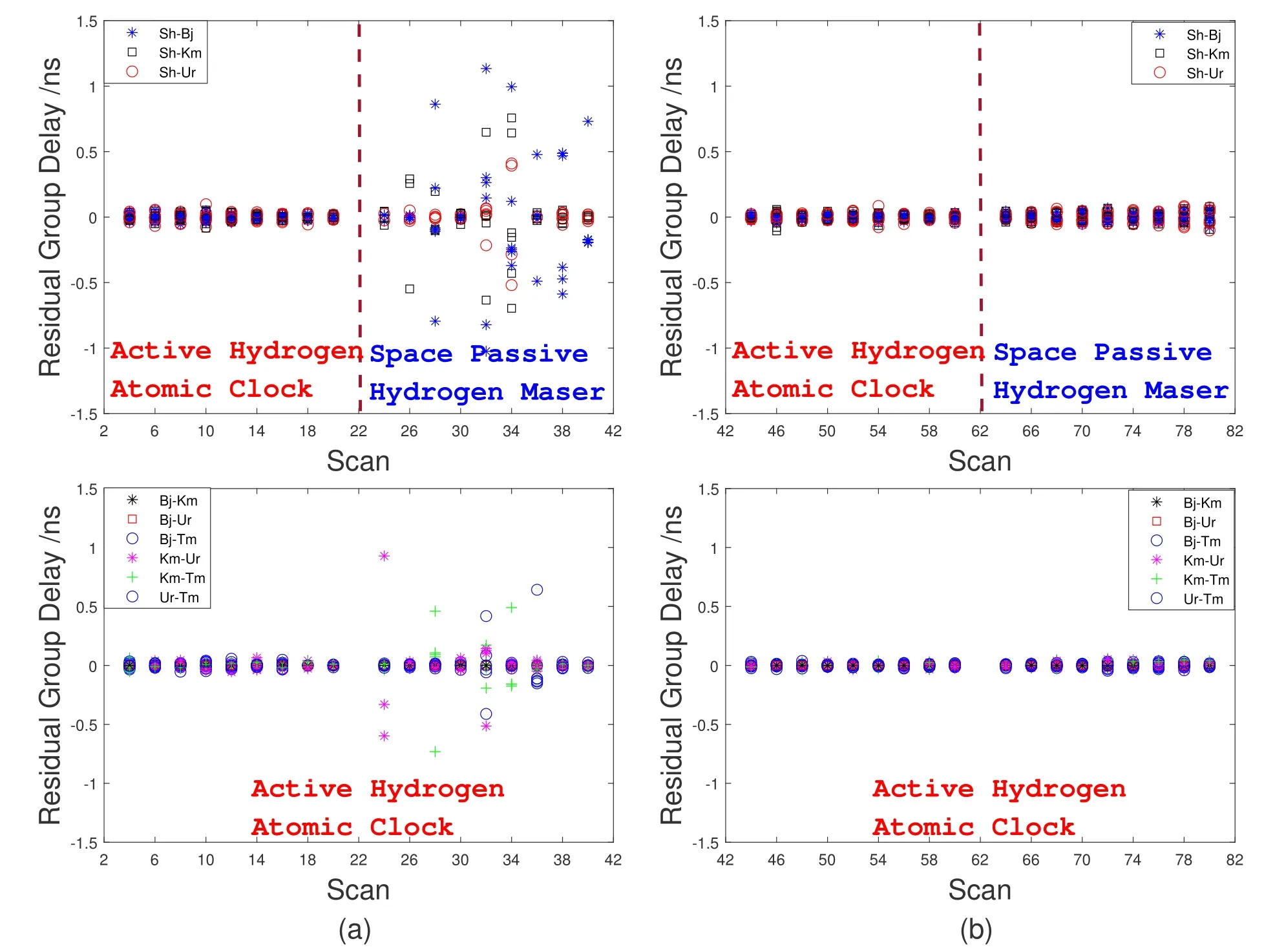
图3 不同基线单个scan内的所有30 s积分的残余群时延减去单个scan的平均值. (a) t1226x结果; (b) t1228x结果.Fig.3 The residual group delay of all 30 s integrals within a single scan minus the average of the individual scans for different baselines. (a) result for t1226x; (b) result for t1228x.
4.3 综合残余群时延误差
将两种氢钟2 h内所有30 s积分点的探测器残余群时延值(去掉野值点)减去2 h内总scan的平均值(去掉野值点), 反映出的是射电源与探测器综合残余群时延方面的误差情况. 为了能更加直观地对比使用不同类型氢钟观测数据精度的差异, 我们处理分析了9条基线的全部数据, 结果如图4所示. 图4红色为使用主动型地面氢钟作为频标时观测数据的处理结果, 黑色为被动型星载氢钟的数据处理结果. 同时, 对探测器残余群时延值的综合误差求标准差及平均值, 结果如表4所示. 从总体上来说, 使用被动型星载氢钟和主动型地面氢钟相比, 残余群时延综合误差略大, 但依然满足月球VLBI测站的精度要求. 如2月26日, 被动型星载氢钟的误差0.333 ns相当于是主动型地面氢钟的0.133 ns的2.5倍. 2月28日, 被动型星载氢钟的误差0.119 ns大约是主动型地面氢钟的0.084 ns的1.5倍.
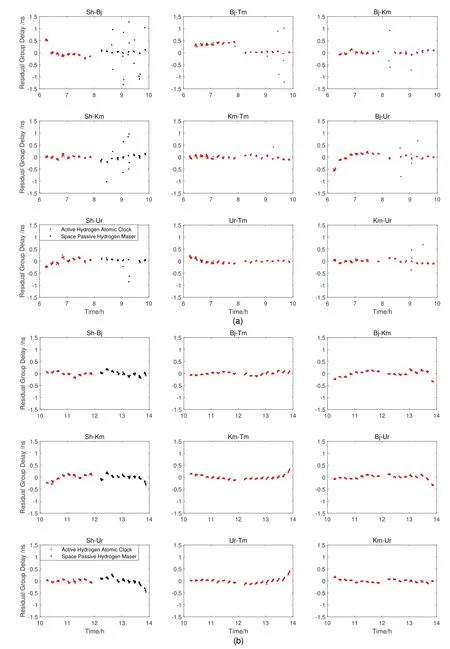
图4 不同基线不同氢钟30 s积分减去对应2 h内总的scan残余群时延平均值. (a) t1226x结果; (b) t1228x结果.Fig.4 The 30 s integration delay minus the average of the total scan residual group delay within the corresponding 2-hour for different hydrogen clocks at different baselines. (a) result for t1226x; (b) result for t1228x.
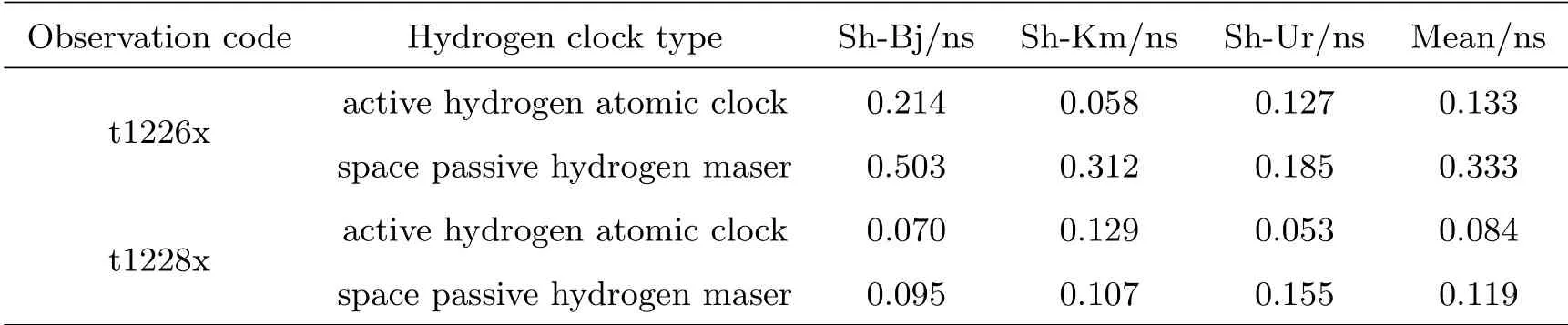
表4 探测器综合残余群时延误差的标准差Table 4 The standard deviation of the integrated residual ground delay error of the probe
数据处理过程中, 发现基线Sh-Km、Sh-Ur的的综合残余误差, 在实验结束时都出现变大的趋势. 为了找出出现相同变化趋势的原因, 在排除了实验仪器和实验数据的问题之后, 我们分析了观测实验期间各观测站仰角变化, 如图5所示. 2月26日实验结束时, 各台站仰角都在60°以上. 而2月28日实验结束时, 佘山测站和北京测站仰角低于30°, 昆明测站和乌鲁木齐测站仰角明显高于前者. 结果表明: 低仰角和高仰角测站组合成基线时会出现上述变化趋势. 而同是低仰角或同是高仰角的测站组成的基线, 则不出现上述变化趋势. 主要原因是测站仰角不同时大气时延差异较大导致的.
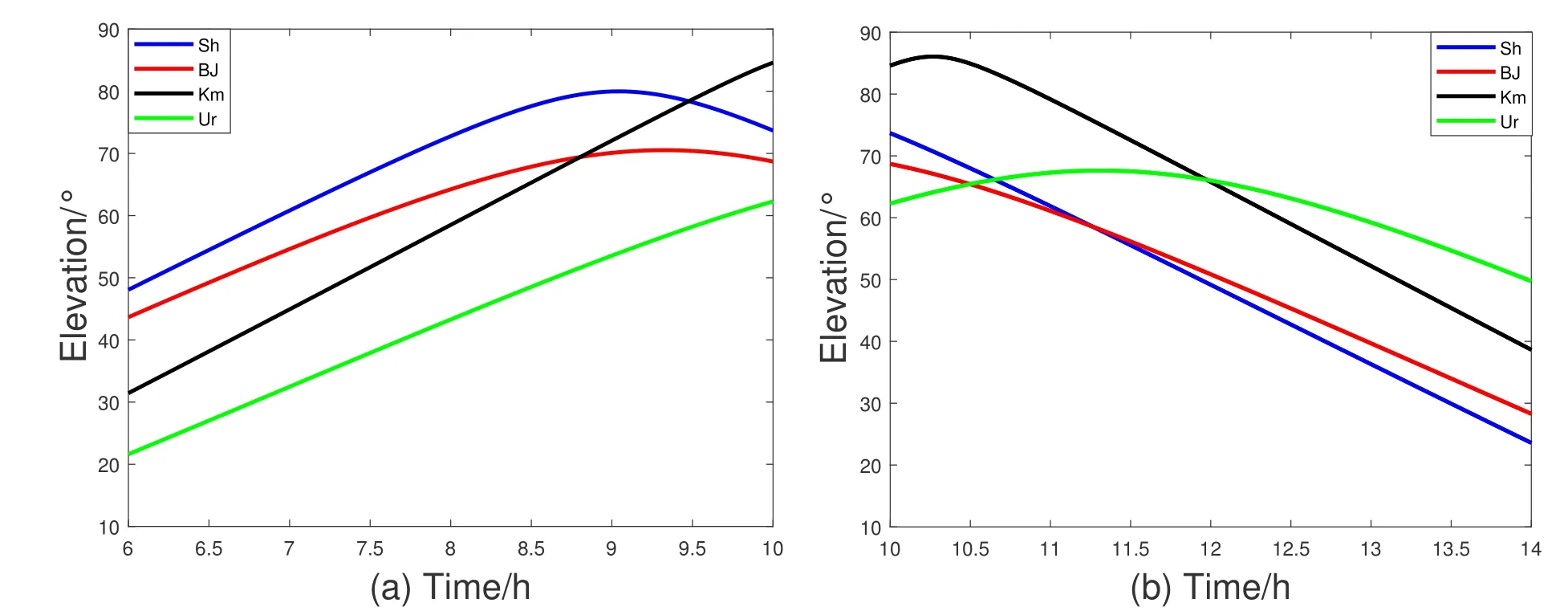
图5 各测站仰角变化. (a) 2月26日; (b) 2月28日.Fig.5 The variation of elevation angle of each station. (a) Feb. 26; (b) Feb. 28.
4.4 残余群时延误差直线拟合
最后对本次实验的探测器残余群时延数据进行直线拟合, 观察多条基线拟合误差的标准差的平均值. 分析使用不同氢钟作为频标, 探测器残余群时延的波动情况, 拟合结果见表5. 从总体上来说, 使用被动型星载氢钟和主动型地面氢钟相比, 残余群时延误差处于同等水平. 如2月26日, 被动型星载氢钟的误差0.322 ns略大于主动型地面氢钟的0.101 ns. 2月28日, 被动型星载氢钟的误差0.085 ns和主动型地面氢钟的0.065 ns相当.
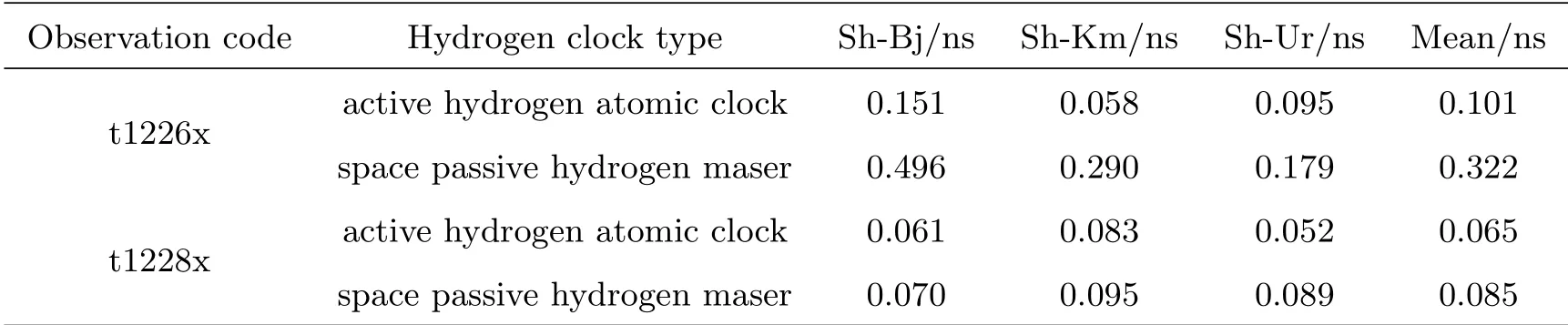
表5 残余群时延直线拟合误差的标准差Table 5 The standard deviation of residual ground delay after straight line fitting
5 总结
本文利用上海VLBI数据处理中心的后处理软件, 对使用不同氢钟作为频率基准得到的观测数据, 依次从scan间射电源残余群时延误差、scan内探测器残余群时延误差、探测器残余群时延综合误差以及残余群时延误差直线拟合结果4个方面进行分析研究. 通过数据分析得出, 使用被动型星载氢钟和主动型地面氢钟相比, 无论是从单方面的探测器残余群时延误差和射电源残余群时延误差, 还是综合方面的综合残余群时延误差和残余群时延误差直线拟合, 两款氢钟的数据结果精度相当, 不存在较大数量级差异. 通过以上星载氢钟的VLBI观测实验结果分析, 我们可以得到被动型星载氢钟和主动型地面氢钟的残余群时延误差精度相当, 被动型星载氢钟可用于月球轨道VLBI实验系统.
猜你喜欢
地理空间信息(2022年11期)2022-11-26 05:47:02
国防科技大学学报(2021年5期)2021-10-10 04:35:42
轻兵器(2019年5期)2019-06-21 01:45:36
测绘学报(2018年10期)2018-10-26 06:12:16
电子科技(2018年4期)2018-04-08 02:06:40
城市勘测(2018年1期)2018-03-15 03:37:02
科技资讯(2016年35期)2017-04-20 10:39:05
读写算·教研版(2016年15期)2016-09-24 21:25:23
读写算·教研版(2016年4期)2016-03-10 11:37:20
电子设计工程(2015年4期)2015-01-25 10:51:12
