
工业机器人喷涂工作站的设计与仿真
2022-04-02 05:59戴斐高敏张君继
科学技术创新 2022年9期
戴斐 高敏 张君继
(1、安徽理工大学,安徽 淮南 232001 2、合肥职业技术学院,安徽 合肥 230011)
喷涂机器人的面世降低了有害气体与光照射等对人体的损伤。因此,喷涂机器人代替人工成为了自动化生产线中的优先选择。
本文研究了RobotStudio 中喷涂机器人和喷涂工具的使用,从喷涂工具的属性设置、编程中所用到的变量数据等方面进行分析以模拟实际的喷涂仿真效果,最后,验证待调试参数设置的合理性。结果表明,可以达到预期效果。
1 喷涂工作站的搭建与布局
在RobotStudio 软件中添加一台IRB5500 机器人,之后点击“导入模型库”按钮,从“设备”中导入一把ROBOBEL926喷涂枪,将其安装到机器人法兰盘上。然后,创建一个“矩形体”作为喷涂的面板。布局时,喷涂机器人与喷涂面板之间的位置要合理,以喷涂面板在机器人工作区域的中间为佳,移动并确认机器人可以顺利到达整个喷涂面板表面。工作站整体布局如图1 所示。

图1 工作站的整体布局
2 图像处理
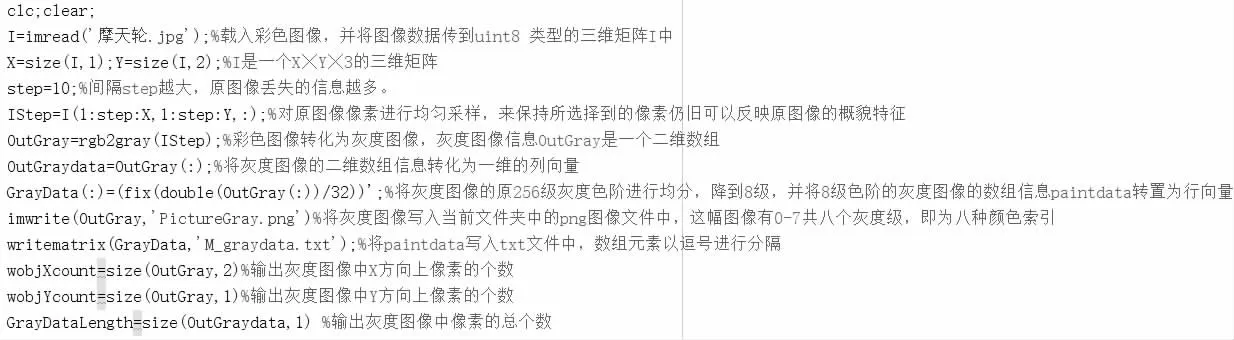
为将彩色图像转化成为灰度图像,先把彩色数字图像的像素信息存在一个三维数组中,然后对原彩色图像像素进行均匀采样,以使所选择像素组成的新图像仍可以反映原图像的特征,等间距采样后得到的彩色图像像素是一个尺寸较小的三维数组,之后将彩色图像的像素颜色信息转化成为灰度图像的像素颜色信息,灰度图像的像素信息为一个二维数组,将该二维数组转化为一维数组,此时,灰度图像具有256级灰度,为简化仿真的同时保持图像的自然感,可将256 级灰度均分为8 级灰度。最后将只包含8 级灰度的一维灰度行数组输出,就是我们在RobotStudio 仿真中需要的8 种颜色索引了。
根据以上原理,可采用多种图像处理的软件,如Matlab、OpenCV、Python 实现上述过程。这里采用Matlab 编写一个脚本,脚本代码如下所示。
3.1 布局好工业机器人喷涂工作站以后,生成机器人系统,之后设置系统选项参数,如系统语言Chinese、DeviceNet通信709-1 等。
3.2 选择工具ROBOBEL926_T_TD_03 自带的一个工具坐标系ROBOBEL926_T_TD_0,并在喷涂面板表面上建一个工件坐标Workobject_1,该工件坐标基于喷涂面板表面的一个直角建立,且z 轴方向垂直于面板表面。
3.3 示教起始目标点:创建目标点pStart 作为喷涂的起始点,该点位于喷涂面板左上角。目标点的方向应该与机器人到达这点时工具坐标系的方向保持一致。且由于机器人喷涂时,TCP 应距离喷涂面板表面有一截距离,所以pStart 应在工件坐标系下,沿着Z 轴正方向偏移20mm。
3.4 创建空路径,选择合适的运动指令并设置好速度和转弯半径后,将pStart 点拖到空路径中从而创建相应的运动指令MoveJ。调整pStart 点处的姿态,选择合适的机器人配置。
3.5 示教安全等待姿态:pStart 点经线性运动后到达距喷涂面板表面合适距离的一个位置jPosHome,选择MoveAbsJ 指令后点击“示教指令”按钮,并同步到RAPID。
3.6 为使工业机器人方便进行喷涂操作,需配置I/O 板
脚本运行后的输出结果如图2 所示。

图2 运行Matlab 脚本后的输出文件及结果
3 机器人离线编程
本文利用RobotStudio 离线编程软件生成一个喷涂工作站,具体步骤如下:卡及工业机器人系统I/O 信号。该喷涂工作站的机器人I/O信号配置如图3 所示。

图3 工业机器人系统I/O 信号配置
3.7 编辑程序,利用RobotStudio 中的检查程序功能检测程序的正确性,设置主程序main_Paint 作为仿真进入点。工业机器人喷涂工作站RAPID 程序的声明如图4 所示。

图4 工业机器人喷涂工作站程序的声明
主程序如图5 所示。

图5 喷涂工作站的主函数
工作站中的子程序如图6 所示。

图6 喷涂工作站的子程序
4 工作站Smart 组件设计
实际生产中是通过PLC 实现工业机器人与外部设备之间的信号交互、连接机器人与周边设备的,而在RobotStudio仿真软件,可采用Smart 组件替代PLC。
4.1 添加smart 子组件并进行参数设置
RobotStudio 软件中,在“建模”菜单栏下,点击“Smart 组件”按钮,在工作站中添加一个空的Smart 组件[1]。在空的Smart 组 件 中 分 别 添 加 RapidVariable、ColorTable、PaintApplicator、LogicGate[NOP]、LogicSRLatch 组件。其中前三个组件的参数分别如图7、8、9 所示。

图7 RapidVariable 组件参数
在示教喷涂点时,注意油漆锥模型一定要接触到喷涂面板表面,否则不能正常为喷涂面板表面上色,即油漆从喷涂枪喷出后的有效长度要大于工具末端表面和喷涂面板的距离20mm。油漆锥模型的最大宽度23mm 应稍大于像素块的尺寸22mm,这样喷出时会有一个像素与像素的叠加,图像显示会是连续的。
4.2 Smart 组件的信号及属性连接
分别在Smart 组件“输入”、“输出”端创建输入信号diDraw、输出信号doDraw。当D652_DoDraw 为1 的时候,diDraw也为1,通过RapidVariable 组件获取机器人控制中的RAPID 变量数据。RapidVariable 中Value 值用来选择ColorTable 中的颜色索引号SelectedColorIndex,即通过设定颜色对应的索引号来选择相应的颜色,索引编号从0 开始。再将ColorTable 中选择的颜色SelectedColor 传给PaintApplicator。喷一次需做一次信号锁定。各子组件的属性连结如图10 所示、信号连接关系如图11 所示。

图8 ColorTable 组件参数

图9 PaintApplicator 组件参数

图10 子组件的属性连结

图11 子组件的信号连接
4.3 工作站逻辑
工作站I/O 信号与Smart 组件中的I/O 信号对应连接情况,即工作站逻辑设定情况见图12。

图12 工作站逻辑设定
5 仿真结果验证
点击“播放”按钮运行。所使用的彩色原图片如图13 所示,喷涂工作站的仿真运行结果如图14 所示,仿真出的灰度图像清晰自然。经测试,可达到预期喷涂要求。

图13 待喷涂的原图片

图14 喷涂仿真运行结果
6 结论
本文基于RobotStudio 仿真平台搭建喷涂工作站,利用虚拟仿真技术解决了喷涂机器人在实际生产生产中可能出现的参数设置问题,可对实际生产中应用喷涂机器人提供参考和指导。
猜你喜欢
今日农业(2022年16期)2022-11-09
兵器装备工程学报(2022年8期)2022-09-13
北京航空航天大学学报(2022年6期)2022-07-02
电脑报(2022年13期)2022-04-12
集装箱化(2021年1期)2021-04-12
电脑报(2020年32期)2020-09-06
电脑报(2020年24期)2020-07-15
中国信息技术教育(2020年2期)2020-02-02
电脑爱好者(2017年22期)2017-12-04
初中生之友·中旬刊(2015年4期)2015-06-10
