光刻机照明系统中继镜组的光场均匀性优化设计
2022-04-01 09:22:10龚爽杨宝喜黄惠杰
光子学报 2022年3期
龚爽,杨宝喜,黄惠杰
(1 中国科学院上海光学精密机械研究所信息光学与光电技术实验室,上海201800)
(2 中国科学院大学,北京100049)
0 引言
光刻机是超大规模集成电路加工的关键设备,照明系统作为核心部件之一,其作用是将光源发出的光束进行整形匀化后照明掩模面,再由投影物镜系统将掩模面上的图形复制到硅片表面。为了提高光刻分辨率和成像对比度并改善焦深,需要根据不同的掩模图形来调整照明模式[1]。光刻机通常采用改变照明光束数值孔径大小和出射光瞳形状的方式来调整照明模式。光刻机中继镜组的主要功能是照明光场的中继传递,将狭缝面的刀口像成像在掩膜面上,在传递过程中要尽量减小照明均匀性的恶化[1]。在传统成像光学镜头自动优化设计中,一般采用波像差、弥散斑或光学传递函数作为评价函数。因此,采用传统像差评价方式无法全面、完整地满足中继镜组的性能评价需求。在光刻机照明系统光学设计中,要根据复杂的应用场景,评价不同数值孔径大小和不同光瞳形状下的照明光场不均匀性[2-3]。
传统光学系统的照度计算基于蒙特卡洛方法,通过追迹大量光线来获取像面照度,其结果的精确程度与追迹光线的数量有关[4-5],使用这种计算方法在设计优化时会造成计算量过大,优化速度较慢以及难以收敛的问题。目前,国内外通用的光学设计软件(例如CodeV 和Zemax)中,仍然采用像方视场角余弦四次方的计算方式[6-7],在大量工程实践中发现通过传统算法设计得到的预期照度分布与实际分布差别较大[8]。对于像方远心系统,像方的视场角为0°,则像平面的相对照度为1,光场完全均匀,这个结论是值得怀疑的。针对像方远心系统,屈恩世等[9]提出以入瞳模式为参考的照度计算模型,得出了以物方视场角余弦四次方的照度计算方法。陈琛等[10]提出针对物方大视场的相似成像物镜系统和非相似成像系统的相对照度计算方法。光刻机照明系统中继镜组具有双远心以及光瞳连续可调的特征,上述算法仍然不适用于中继镜组的像面相对照度计算。
本文针对光刻机照明系统,提出利用出射光瞳数值孔径(Numerical Aperture,NA)来表征照明系统掩膜面照度的方法,可快速计算出各照明参数下的照明光场均匀性,并利用均匀性作为自动优化过程中的评价函数,优化设计了光刻机照明系统中继镜组,并对设计得到的中继镜组进行仿真和实验验证。
1 基本原理与概念
1.1 投影式光刻机的光学原理
投影式光刻机照明系统结构如图1[11]所示。光源经过扩束准直与传输后进入光瞳整形单元,然后再经过照明匀化单元来实现特定分布的照明光场,扫描狭缝用来确定曝光视场尺寸和中心位置,控制曝光剂量,并与掩模台和硅片台完成同步扫描曝光[12]。中继镜组(Relay lens)位于扫描狭缝与掩模板之间,负责将扫描狭缝上的照明光场中继成像到掩模面上。光瞳整形单元由衍射元件、变焦距准直镜组和锥形镜组组成,其中衍射元件用来生成不同的光瞳形状,如传统、环形、二极、四极和特定光瞳形状;变焦距准直镜组用于改变光瞳的环宽;锥形镜组用于改变光瞳外径和内径的大小[13]。
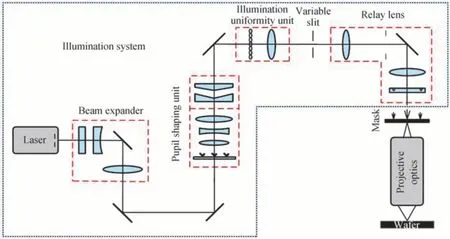
图1 投影式光刻机的光学原理示意图Fig.1 Schematic of the optical principle of projection lithography
1.2 照明部分相干因子
在光刻过程中,需要针对不同的掩模图形采用不同的离轴照明模式来增强光刻分辨率、改善焦深、提高成像对比对,从而得到更好的光刻性能[14]。因此,对于深紫外光刻机而言,一般需要调节照明系统的部分相干因子(Partial coherent factor,σ),如图2所示,使不同宽度的曝光线条达到最佳分辨率。σ定义为照明系统数值孔径与投影物镜物方数值孔径之比,即


图2 部分相干照明示意图Fig.2 Schematic of partial coherent illumination
式中,Dobj为投影物镜的光阑口径,Dill为投影物镜光阑处照明光束的口径;NAobj为投影物镜像面数值孔径,NAill为照明光束在投影物镜像方的数值孔径。
1.3 照明均匀性
光学系统中,当物为余弦辐射体,并且光学系统满足正弦条件,轴上像点的照度与孔径角正弦的平方成正比,即[15]

式中,E′o为轴上像点的照度,L为物面亮度,τ为光学系统的透过率,n为物方介质折射率,n′为像方介质折射率,U′为像方孔径角。
光学系统的像方数值孔径为NA=n′sinU′,n=n′=1,则轴上像点的照度为

可见,轴上像点的照度与像方数值孔径的平方成正比。由于照明系统在掩模面为像方远心光路,轴外像点照度同样可用式(3)来表示。
如图3所示,对于无渐晕的轴上像点,由于光学系统的对称性,其出射光瞳为圆形,子午面和弧矢面的边缘光线与主光线的夹角都为U′;对于无渐晕的轴外像点,由于光学像差的必然存在,其出射光瞳呈现椭圆性。子午面上边缘光线与下边缘光线走过的路径不同,它们与主光线的夹角也不相同。而弧矢面左右光线相对于子午面对称,其边缘光线与主光线的夹角也相同。因此,轴外像点出射光束的NA2可近似计算为
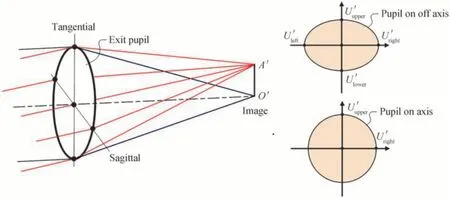
图3 轴外光束立体角的计算Fig.3 Calculation of solid angle of off-axis beam

式中,U′upper为出射光束子午面上边缘光线与主光线的夹角,U′lower为射光束的子午面下边缘光线与主光线的夹角,U′left为出射光束弧矢面边缘光线与主光线的夹角。

式(5)也可用来计算光瞳内一个环带产生的照度,实际照度的计算精度可通过增加采样的环带数来提高。在一个照明光场内,照明均匀性可表示为[3]

式中,UNU为照明均匀性,Emax为像面上的最大照度,Emin为像面上的最小照度;为照明光场内NA2的最大值,为照明光场内NA2的最小值。式中没有考虑材料的吸收和光学薄膜的透过率对照明均匀性带来的影响。
2 中继镜组的光学设计
中继镜组作为照明系统的核心部件之一,负责将扫描狭缝上的照明光场成像到掩模面上[1],它不仅需要满足不同光瞳大小和环宽的照明模式需求,并且要尽量减少照明光场不均匀性在中继过程中的恶化。在所研制KrF 光刻机照明系统中,中继镜组的主要性能指标如表1所示。

表1 中继镜组的性能指标Table 1 Parameters of the Relay Lens
2.1 光瞳划分
从照明部分相干因子(σ)的定义可知,当σ=1 时,照明光束的数值孔径与投影物镜的数值孔径相等,定义此时所对应中继镜组的相对光瞳(Relative pupil)大小为1,光学设计中将部分相干因子的大小近似为中继镜组相对光瞳大小。
部分相干因子变化范围为[0.16,1],则中继镜组相对光瞳变化范围为[1/6.25,1],像方数值孔径变化范围为[0.032 8,0.205];部分相干因子最小环宽为0.24,对应相对光瞳环宽为1/4.17,像方数值孔径为0.049 2。
光学自动优化过程中,为了能够全面评估不同光瞳大小和不同环形光瞳所形成光场的照明均匀性,将中继镜组光瞳按照图4所示区域进行划分成。传统照明按照5 种相对光瞳进行评价,如表2所示;环形照明按照4 种相对环形光瞳进行评价,如表3所示。
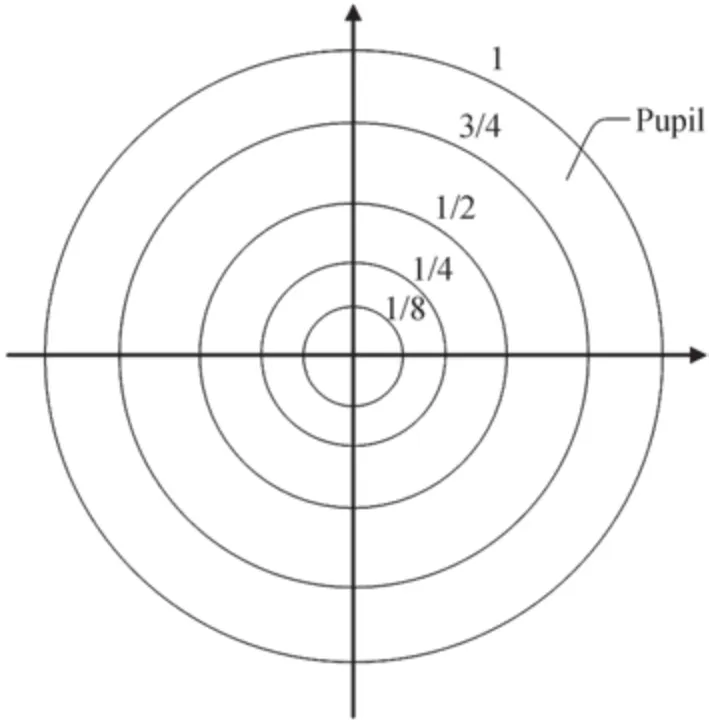
图4 出射光瞳区域划分示意图Fig.4 Diagram of exit pupil regionalism

表2 传统照明下相干因子对应数值孔径Table 2 Numerical aperture corresponding to coherence factor under conventional illumination

表3 环形照明下相干因子对应数值孔径Table 3 Numerical aperture corresponding to coherence factor under annular illumination
2.2 评价函数
在传统的光学镜头自动优化设计中,一般采用波像差、弥散斑或调制传递函数(Modulation Transfer Function,MTF)作为评价函数。光刻机中继镜组的主要功能是照明光场的中继传递,在传递过程中要尽量减小照明均匀性的恶化。因此,采用传统像差评价方式无法全面、完整地满足中继镜组的性能评价需求。本文利用出射光瞳数值孔径NA2来表征像面照度的方法,可快速计算出照明光场的均匀性,并利用均匀性作为自动优化过程中的评价函数。
将整个照明光场进行n等分,在照明部分相干因子为σ时,根据式(4)计算出每个视场点出射光束的NA2,并对NA2进行归一化处理,可以计算出整个照明光场的相对照度。求出照明光场中NA2的最大值和最小值,就可以计算出照明均匀性UNU(σ),即

利用光学设计软件Code V、Zemax 等,将照匀性UNU(σ)加上一个权重(W)作为目标值参与中继镜组的光线自动优化过程,其中σ=1,3/4,1/2,1/4,1/8;W根据不同σ下的优化结果进行调整。

当相干因子σ下的照明光场完全均匀时,式(8)成立,UNU(σ)的值越小代表光场均匀性越好。在优化设计非成像光学系统时,其原理与传统的成像系统相同。优化设计的原理仍是在参数空间内寻找评价函数的全局最小值,不同的是将传统的评价函数(如几何像差参数、波相差等)替换成了能反映非成像系统性能参数的评价函数。
3 中继镜组设计结果分析
中继镜组设计结果如图5所示,由9 片透镜组成,物像双远心结构,在小彗差的情况下,中继镜组近似满足正弦条件,材料全部为KrF 级熔石英,光阑位于第5 片透镜前表面附近。

图5 照明系统中继镜组结构图Fig.5 Structure diagram of relay lens set of illumination system
中继镜组像方视场为104 mm×32 mm,最大半视场(对角线)设计值为55 mm,设置视场点间隔5.5 mm,共11 个视场点。中继镜组有多个性能需求,主要包括光场均匀性、半影宽度、远心度、光瞳极平衡性、光瞳椭圆度等,因此需要多个评价函数分别评价。设计时为这些指标分配不同的权重因子,并在设计过程中根据优化结果调整权重,如此反复迭代直至各指标全部满足需求。本文主要讨论通过优化NA 一致性来提高中继镜组的照明均匀性,故未详细介绍中继镜组的其他性能指标及优化方法。将UNU(σ)作为评价函数之一参与中继镜组的自动优化,最终优化结果由照明均匀性和相对照度进行评估分析。
由表4所示,采用照明均匀性作为设计优化过程中的评价函数,各照明参数下的照明均匀性均达到设计指标。根据NA 的近似算法,得到掩膜面光能的相对照度分布如图6 和7所示。

图6 传统照明模式下不同σ 的相对照度Fig.6 Relative illumination of conventional illumination of different σ

表4 传统照明和环形照明模式下不同σ 下的照明均匀性Table 4 Illumination uniformity of convention illumination and annular illumination under different coherence factors
为验证设计结果的正确性,将设计的中继镜组在LightTools 软件中进行了相关仿真验证,仿真模型如图8所示。利用软件中的反向追迹功能,在位于掩膜面的接收器上设置11 个测试点,测试点间隔为5.5 mm,在测试点对应位置设置点光源,光源的角度分布设置为朗伯辐射体。通过改变光源的出射球面角度来实现各相干因子σ的调节。仿真验证时追迹光线的总数为385000,照度计算的估计误差约为0.53%。
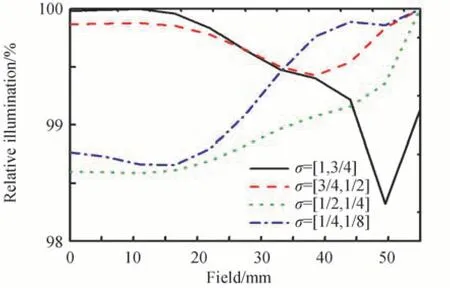
图7 环形照明模式下不同σ 的相对照度Fig.7 Relative illumination of annular illumination of different σ
通过仿真验证,得到掩膜面光能的相对照度分布如图9 和10所示。与设计得到的相对照度分布对比,在视场0~40mm 范围内,仿真结果与设计结果在分布趋势上有较好的一致性,在视场大于40 mm 后,某些照明模式下呈现出了明显差异,这是由于NA的近似算法误差以及系统像差造成的。通过分析比较可以看出,传统照明差异比环形照明差异更大,并且随着NA的减小和视场的增大,误差呈变大的趋势。此外实际出射光瞳切趾并非是严格的均匀分布,这也会在评估时造成一定的误差。
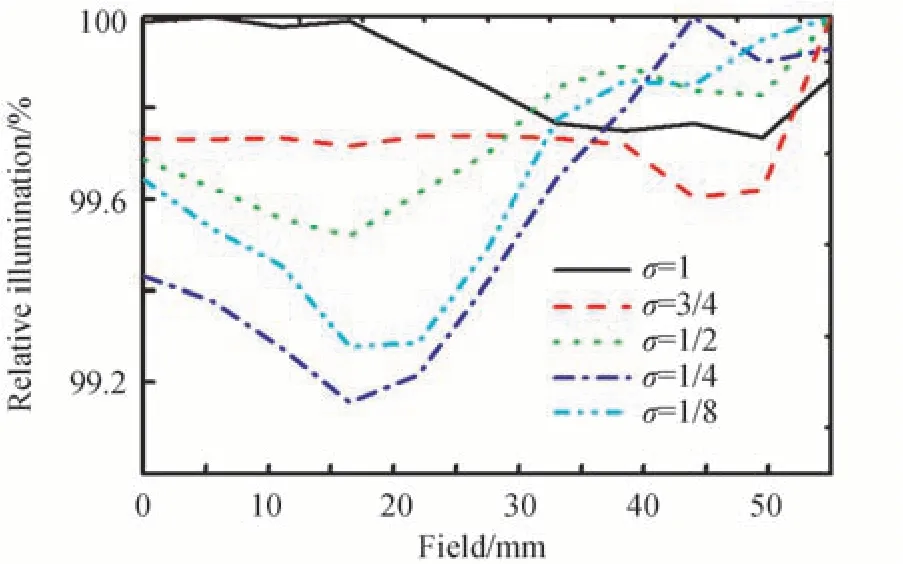
图9 仿真得到传统照明模式下不同σ 的相对照度Fig.9 Simulated relative illumination of conventional illumination of different σ
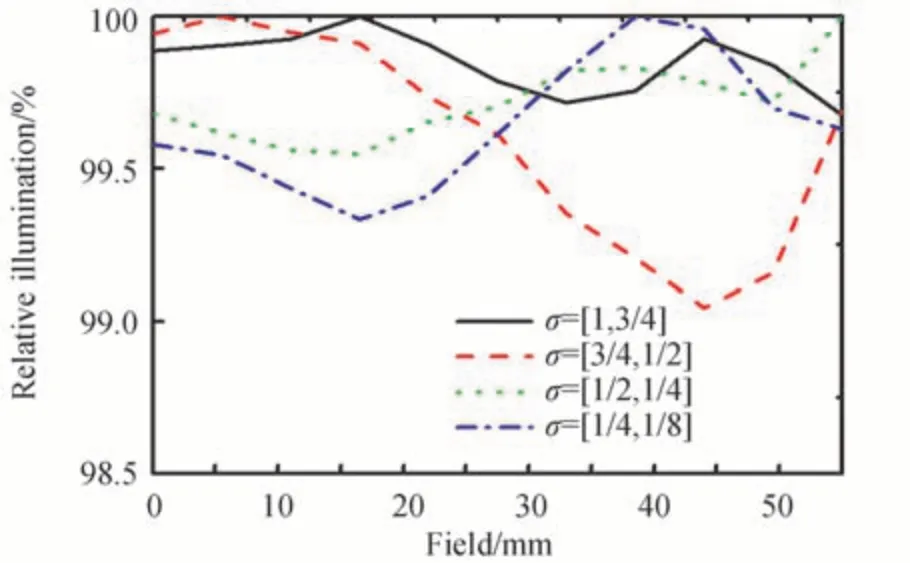
图10 仿真得到环形照明模式下不同σ 的相对照度Fig.10 Simulated relative illumination of annular illumination of different σ
仿真得到的光场不均匀性结果如表5所示。与设计结果相比,各照明条件下的光场不均匀性都优于设计值,这是由于设计时评价函数是通过近似方法计算各视场的NA,在此过程中放大了各视场间NA 的差异。用式(2)计算像面照度是建立在系统对整个光瞳具有均匀能量分布的假设之上,但是在实际照明系统中,光瞳中心部分的透过率会高于边缘透过率,出射光瞳的能量更向中心集中,导致使用快速评估算法时造成系统性误差。此外,使用近似算法时,需要系统满足正弦条件,要求系统的正弦差和球差均为0。对于中继镜组而言,正弦差可以满足要求,而球差不可忽略,且为负值,造成系统未严格满足正弦条件。光瞳切趾分布和中继镜组的球差是造成评估算法误差的主要因素,且均具有确定的方向性,意味着每个视场的像点是一个具有一定尺寸的弥散斑,设计时通过NA计算得到的光场分布需要卷积弥散斑才能得到实际的光场分布,这本质上是对光场进行了匀化,会一定程度去除光场分布中的高频突变量,提高实际光场的均匀性。弥散斑作为卷积核,如果不同视场的弥散斑尺寸一致性较差,则不同视场范围的光场需要卷积不同尺寸的弥散斑,当在其尺寸较小的视场范围内,光场分布会更加接近设计值,当在其尺寸较大的视场范围内,光场分布会比设计值更加平滑。这也是仿真测试得到的光场分布会与设计值存在误差,并且其不均匀性会优于设计时评估值的原因。另外,虽然增大弥散斑的尺寸会增加光场的均匀性,但也会使光场的半影宽度增大,造成光场性能下降,在设计时需要控制弥散斑的尺寸范围来平衡这两个性能指标。

表5 仿真得到传统照明和环形照明模式下不同σ 时的照明不均匀性Table 5 Simulated illumination uniformity of convention illumination and annular illumination under different coherence factors
因此用该近似算法作为光学设计时的评价函数是一个相对保守的评估方法,实际光场不均匀性会优于设计评估的结果。但是从追迹光线的数量上分析,商用软件CODEV 以及LightTools 均采用蒙特卡洛追迹算法来计算各个视场点的照度,这种计算方法显然需要追迹大量的光线数量,并且计算精度与光线数量相关。如在仿真验算时,单个照明模式下,对11 个视场点共追迹了385 000 条光线,每个视场35 000 条。相比之下,提出的快速评估算法对每个视场点最少仅需要追迹5 至9 条光线,即使增加采样的环带数,追迹数量也不会超过25 条。并且在设计时需要评估多个照明模式下的相对照度,进一步加大了两种算法的效率差距。由于评估算法结果偏向保守的特性,可以保证设计的中继镜组实际光场不均匀性符合指标需求。
提出的照明均匀性评估算法得到是一个近似估计值,其计算精度相比于基于蒙特卡洛的追迹算法较低。但是将其作为设计优化的评价函数时,不会要求计算结果与实际值严格相等。作为设计优化时的评价函数,算法满足三个特点:1)虽然算法存在一定误差,但是其与实际性能指标保持较高的相关性,能够反映实际的照明均匀性,可以通过控制评价函数的值,提高系统的照明均匀性;2)算法的结果被证明具有保守的特性,即实际的照明均匀性会优于设计值,这保证了设计得到的结果满足性能需求;3)该评价算法在速度上相比蒙特卡洛法有巨大的优势,可以满足优化设计的需要。
4 中继镜组的实验验证
为了验证光刻机照明系统中继镜组的实际光场均匀性,对照明系统掩膜面光场分布进行检测,采用的光场检测技术基于能量点探测器实现,即利用能量点探测器对掩膜面的光强能量进行扫描式采样。为提高检测结果的一致性,还需要对所采集的光强数据进行归一化处理,照明系统如图11(a)所示。
光场检测装置如图11(b)所示,检测掩膜面光场分布时,驱使位移台使小孔光阑和能量探测器移动,通过能量探测器记录采样点的光强,同时记录位移台两个运动方向驱动轴光栅尺读数作为采样点坐标值,重复上述步骤直至完成全视场内的光强检测。实验中,x、y方向采样点数分别为53 和49 个。KrF 步进扫描投影光刻机进行掩模曝光时,照明光场沿步进方向的宽度分别为104 mm,沿扫描方向梯形轮廓的顶部、半腰、底部宽度分别为20 mm、26 mm 和32 mm。掩膜面的光场分布以及光场的积分曲线如图12所示,实际照明系统更关注光场步进方向的积分均匀性。

图11 光场均匀性实验装置Fig.11 Experimental device of illumination uniformity

图12 照明光场和归一化积分曲线Fig.12 Illumination field and normalized integrated illumination profile
在设计和仿真验证时,假设中继镜组物平面(狭缝面)光场为完全均匀分布,而由于实际光束匀化单元存在制造误差、装配误差、材料吸收等因素,狭缝面的光场并非完全均匀分布。将光束整形单元离线测试得到的光场分布作为中继镜组的输入光场,掩膜面的光场分布作为输出光场,则二者的比值为中继镜组的实际光场透过率分布,实验得到中继镜组步进方向光场积分曲线如图13所示。

图13 实验得到不同σ 的相对积分照度曲线Fig.13 Experimental relative integrated illumination of different σ
实验结果与设计光场分布在趋势上比较吻合,不均匀性大于设计值。并且各照明相干因子下,光场分布呈现不对称性,光场右侧变化幅度均大于左侧,认为这是由装配引起的系统误差,此外非理想镀膜、材料吸收,光学元件加工误差等因素都会劣化实际中继镜组的光场不均匀性,实验得到各相干因子光场不均匀性结果如表6所示。实验结果表明,所设计的中继镜组光场不均匀性均满足指标要求,证明了设计方法的有效性。

表6 实验得到传统照明和环形照明模式下不同σ 下的照明不均匀性Table 6 Experimental illumination uniformity of convention illumination and annular illumination
5 结论
本文提出了一种快速计算光学系统像面照度均匀性的算法,通过近似算法计算系统数值孔径,并利用出射光瞳数值孔径来表征像面照度。利用该快速评估算法计算光场不均匀性,并将均匀性作为优化函数,通过CODE V 优化设计投影式光刻机照明系统中继镜组,实现了各相干因子照明下掩膜面上的均匀照明。对所设计的中继镜组进行仿真验证,证明了评估算法的有效性。仿真结果表明各相干因子照明下掩膜面上的光场不均匀性均小于0.5%,符合中继镜组光场不均匀性小于2.5%的指标需求。仿真结果均优于快速评估算法得到的设计值,表明快速评估算法具有保守特性。最后通过实验测试了所设计的中继镜组的积分均匀性,结果表明各相干因子下,光场非均匀性均满足指标要求。证明了评估算法的有效性,可以在设计时作为照明均匀性的评价指标,有效提高光刻机照明光场的性能。
猜你喜欢
中国经济周刊(2023年23期)2024-01-08 05:43:43
中国经济周刊(2023年23期)2023-12-31 08:01:10
临床眼科杂志(2020年6期)2021-01-13 10:12:30
中国电子报(2020年56期)2020-09-13 22:47:25
科学(2020年5期)2020-01-05 07:03:12
制造技术与机床(2019年6期)2019-06-25 10:18:08
宇航计测技术(2017年4期)2017-11-27 05:46:33
常州工学院学报(2017年3期)2017-09-16 03:48:25
电子工业专用设备(2015年4期)2015-05-26 09:10:35
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:10