着陆滑跑地面综合控制技术研究
2022-04-01 02:34:58李广文
弹箭与制导学报 2022年1期
张 祥,李广文
(1 昆明船舶设备研究中心,昆明 650051;2 西北工业大学自动化学院,西安 710072)
0 引言
着陆滑跑阶段是飞机飞行过程的最后阶段,也是受力最为复杂的阶段。在此阶段,飞机可能会受到侧风扰动、机场跑道不平及飞机接地时未对准跑道中心线等因素影响,在刹车减速过程中不可避免的相对跑道中心线产生侧向偏离和航向偏离,若不进行纠偏控制,飞机很容易冲出跑道,引发事故。因此需要进行地面综合控制,地面综合控制即把前轮转弯、防滑刹车和方向舵控制功能综合在一起由计算机协调控制,根据飞机与跑道的偏离信号生成相应的地面操纵指令,控制飞机对准跑道,保证飞机在恶劣条件下安全着陆。
地面滑跑段的精确建模是地面综合控制的难点之一,PI等在考虑起落架和机体相互作用的基础上建立滑跑模型,但忽略了角运动,为四自由度模型;李洁玉从飞机地面受力出发,根据平衡状态方程求解支持力并建立滑跑模型,但只考虑了三轮滑跑情况,未对两轮滑跑进行建模。在地面综合控制方面,欧洲空客公司以A320为代表的机型将方向舵、前轮转向操纵和差动舵刹车功能综合到一个控制器里控制。国内此方面技术相对薄弱,刘正辉采用相似性双余度技术,提出前轮操纵和主轮综合的设计方案,但没有将方向舵进行综合;贾采娟使用主辅模糊控制器相结合的双重模糊控制算法,采用主轮差动刹车和阻力方向舵联合纠偏方式,取得了较好的仿真控制效果,但未进行试飞验证。
文中在进行飞机地面受力分析的基础上,建立地面运动的动力学模型和地面操纵模型;然后引入影响因子,设计将方向舵、差动刹车、前轮转弯融于一体的综合纠偏控制律;最后对滑跑模型和纠偏控制进行仿真验证,仿真结果表明,地面滑跑模型符合实际过程,综合纠偏控制效果较好。
1 飞机地面运动受力分析
建立飞机地面滑跑模型的关键在于分析飞机在地面的受力情况。飞机在地面运动时,除了受到空气动力、推力、重力的作用,还受到地面纵向摩擦力和侧向摩擦力的作用。飞机滑跑过程分为两轮滑跑和三轮滑跑,以前轮是否触地作为判断依据,在两轮滑跑时,前轮未触地,因此不受地面支持力和摩擦力作用。
飞机地面滑跑受力如图1、图2所示,图中的变量名称见下文。
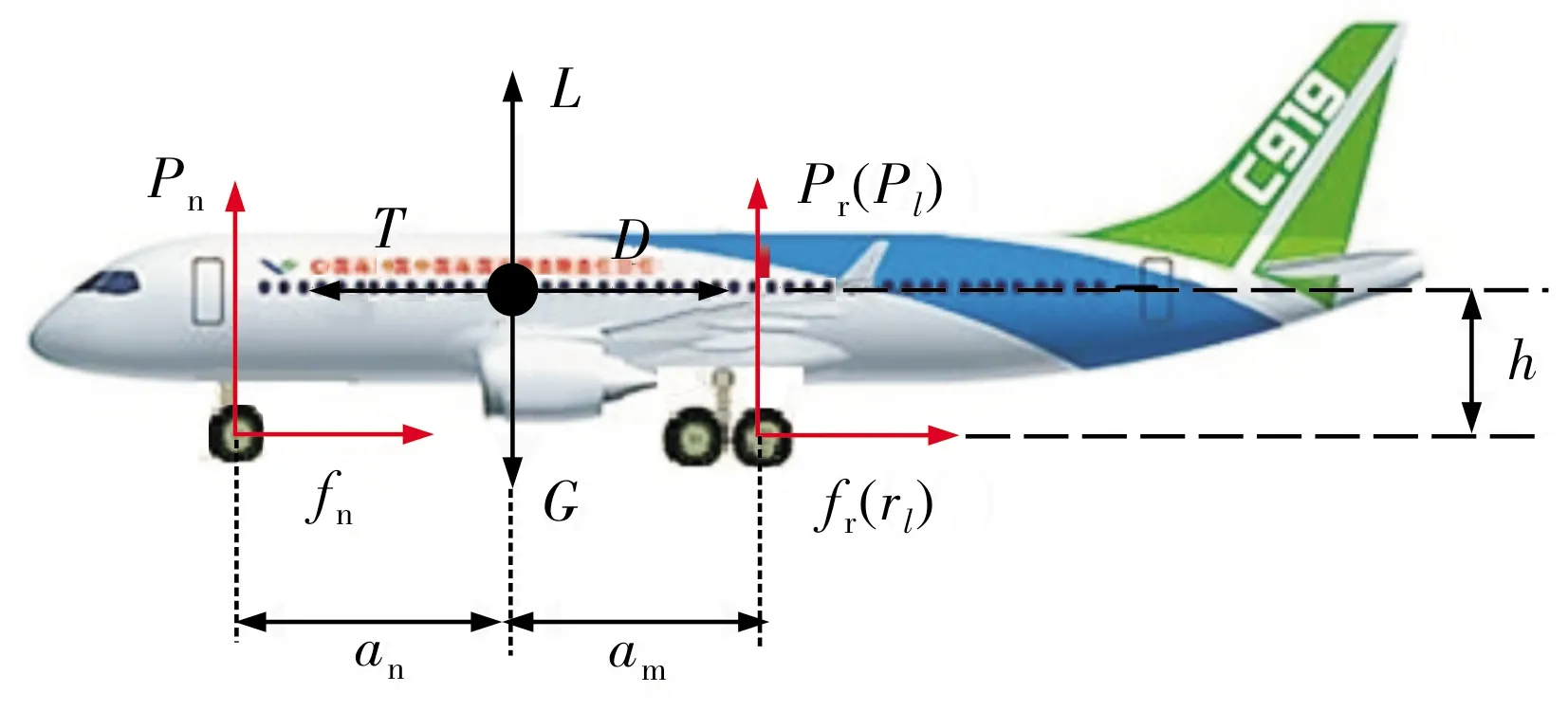
图1 飞机地面滑跑受力正视图
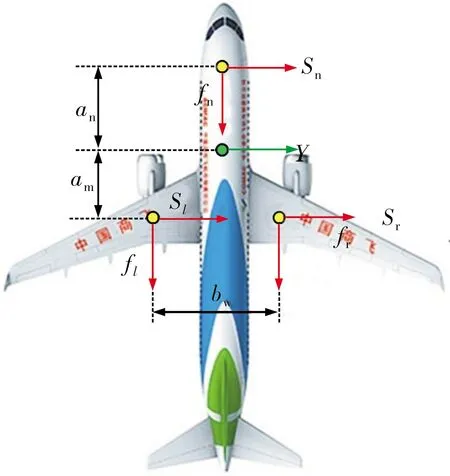
图2 飞机地面滑跑受力侧视图
1.1 重力及其力矩
地面坐标系下,飞机的重力表示为:=[10 0
],由于飞机重力经过重心,故产生的力矩为0。
1.2 空气动力及力矩
在气流坐标系下,空气动力表达式为:
[]=[]
(1)
在速度坐标系下,气动力矩表达式为:

(2)
1.3 发动机推力及其力矩
在机体坐标系,推力和力矩表达式如下:

(3)
式中:是推力;是推力力矩;是发动机安装角;是推力轴线到重心的距离。
1.4 地面支持力及力矩
飞机在地面滑跑时,地面对起落架有向上的支持力和力矩作用,将起落架视为刚体,根据力和力矩平衡条件求解支持力。在地面坐标系下两者的表达式为:
=[0 0 ---]
(4)
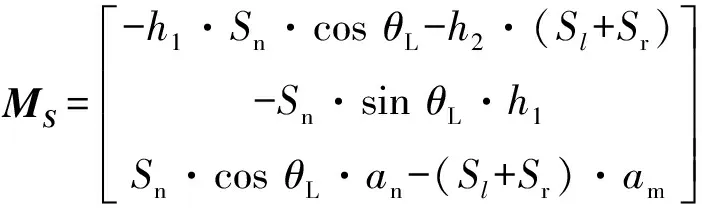
=[(-)·2·-(+)·0]
(5)
式中:,,分别是前轮、左右主轮受到的支持力,当飞机处于两轮滑跑时,前轮未接地,=0;是前轮到重心的水平距离;是主轮到重心的水平距离;是主轮距。
1.5 摩擦力及其力矩
飞机地面运动时会受到纵向摩擦力和侧向摩擦力的作用,大型民用机一般会配备前轮转弯操纵系统,当前轮发生偏转时,将影响摩擦力大小和方向,因此摩擦力建模时需要充分考虑前轮转向。摩擦力受力分析如图3、图4所示。
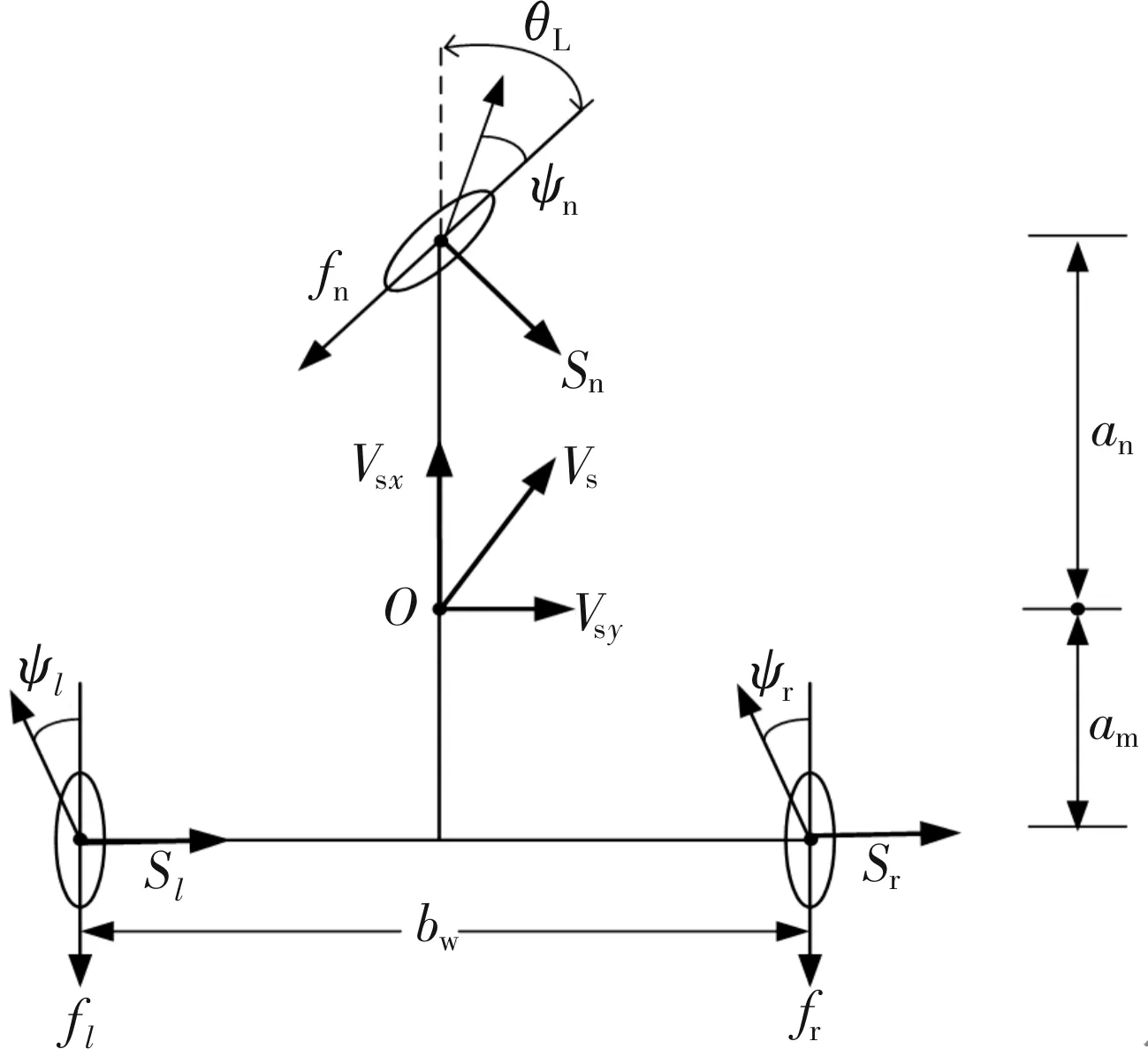
图3 三轮滑跑时摩擦力受力图
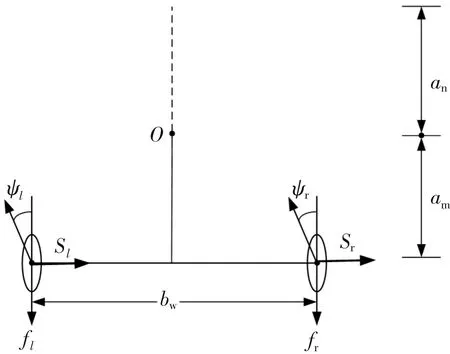
图4 两轮滑跑时摩擦力受力图
151 纵向摩擦力
飞机三轮受到的纵向摩擦力为:
[]=[···]
(6)
在稳定坐标系下,纵向摩擦力表示为:
=[-·cos---·sin0]
(7)
在机体坐标系下,纵向摩擦力矩表示为:

(8)
式中:,,分别是前轮、左右主轮受到的结合力系数;是前轮偏角;,,是前轮、左右主轮受到的纵向摩擦力;是前轮轮心到飞机重心所在基准线的高度;是飞机主轮轮心到飞机重心所在基准线的高度。
152 侧向摩擦力
在侧向摩擦力的作用下,飞机机轮速度和轮胎表面之间有偏角,称为侧偏角,定义机轮速度方向位于轮胎平面右侧时侧偏角为正。在不大时,侧向摩擦力近似等于侧偏刚度和侧偏角的乘积:
[]=[···]
(9)
式中:是侧偏刚度;,,是前轮、左右主轮的侧偏角;,,是前轮、左右主轮受到的侧向摩擦力;当飞机两轮滑跑时,前轮的侧向摩擦力为0。
求取侧向摩擦力的关键在于计算各轮侧偏角,计算方法如下:
左右主轮的侧偏角为:

(10)
当前轮偏转时,前轮侧偏角为:
(11)
在稳定坐标系中,侧向摩擦力表示为:
=[-·sin·cos++0]
在机体坐标系中,侧向摩擦力矩表示为:
(12)
式中:s,s,s是地速在稳定坐标系中的三轴分量;是偏航角速率。
2 飞机地面综合控制系统建模
飞机地面综合控制所需模型包括飞机地面三轮滑跑动力学模型、两轮滑跑动力学模型、前轮转向模型和刹车系统模型。
2.1 三轮滑跑动力学模型
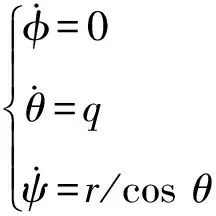
在三轮滑跑时,飞机高度不变化,有=0,=0;飞机无滚转,有=0,=0;此外,飞机俯仰角等于停机角,于是有=0。在上述约束条件下,可得三轮滑跑的力、力矩、运动、导航方程组分别为:
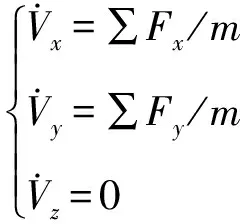
(13)
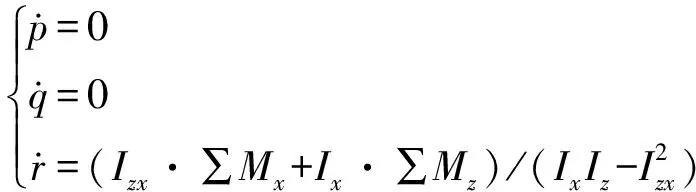
(14)

(15)

(16)
以上方程组中:∑,∑是地面坐标系下沿轴、轴的合外力;是飞机质量;,,地面坐标系下三轴的速度分量;,,是飞机沿机体轴的3个角速度;,,分别是滚转角、俯仰角、偏航角;,,分别是地面坐标系下沿三轴的距离;∑,∑是机体系下沿轴、轴的合力矩;,,是飞机的转动惯量和惯性积。
2.2 两轮滑跑动力学模型
在两轮滑跑段,飞机刚触地时带有较大的迎角,以利用较大的阻力来使飞机减速,当速度减小到一定值时,推杆压机头,使前轮接地。此过程中俯仰角和俯仰角速率是变化的,纵向上受力不平衡,因此两轮滑跑的数学模型和三轮滑跑时有所不同,其力、力矩、运动、导航方程组分别为:

(17)
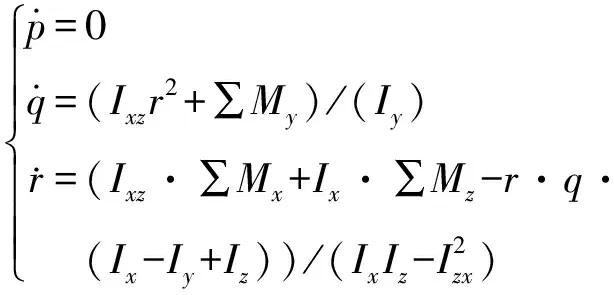
(18)
(19)

(20)
以上方程组中:∑是地面坐标系下沿轴的合外力;∑是机体系下沿轴的合力矩;是沿轴的转动惯量。
2.3 前轮转弯模型
前轮转弯的工作原理是地面综合控制器给出转弯指令,指令信号通过指令传感器传送到刹车转向控制器里,控制器进行转弯增益计算,将结果传输到液压伺服阀产生液压压力,再通过作动器控制前轮进行偏转。简化成一阶惯性环节:

(21)
式中:为给定的前轮转向指令;为实际滑跑中偏转的前轮角度值;为作动器带宽。
2.4 刹车系统模型
刹车系统模型由刹车装置模型、机轮模型、结合系数模型构成。
241 刹车装置模型
刹车装置是刹车系统的制动设备,其主要作用是将刹车压力转化成刹车力矩,其转化的影响因素包括摩擦系数、刹车力大小、轮盘半径等。可用式(22)计算:

(22)
式中:表示刹车力矩;是动盘与静盘之间的摩擦系数;是动静盘之间的摩擦面数;表示刹车压力;是静盘半径;是动盘半径。
242 机轮模型
飞机在刹车时,机轮受到刹车力矩和结合力矩(摩擦力矩)的作用,机轮轮速根据力矩差来控制,其受力关系如图5所示。

图5 机轮刹车受力图
根据受力分析有:

(23)

243 结合力系数模型
滑移率定义为:机轮相对于地面的滑动量,设是机轮中心的航向速度,计算公式为:
=(-)
(24)
结合力系数受滑跑速度、跑道表面粗糙程度、轮胎转态、滑移率等众多因素的影响,与滑移率的关系最为密切,忽略其它因素,有:
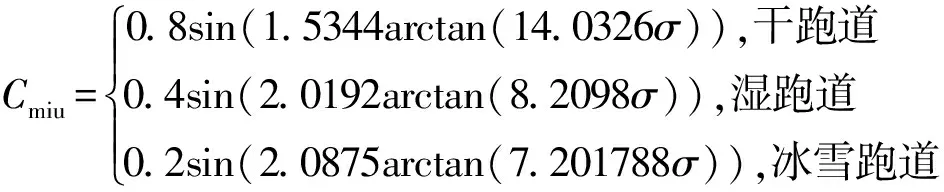
(25)
式中:表示结合力系数。
3 地面滑跑综合纠偏控制律设计
民用机目前常通过方向舵控制、前轮转向和主轮差动刹车3种方式来进行纠偏控制,然而在很多机型上,前轮转向、刹车系统和方向舵是相互独立的,尽管都具有滑跑纠偏控制作用,但是未能做到合理高效的协调配合,往往通过飞行员手动操纵实现纠偏控制。而地面综合控制器将防滑刹车、前轮转向和方向舵的功能进行综合,采用一个控制器由计算机协调控制,不仅可加强各个系统之间的信息交互和协调配合,还能有效降低操纵难度,提高纠偏控制的性能,增强飞机在恶劣条件下滑跑的安全性。
综合纠偏控制的基础在于设计方向舵纠偏控制律、前轮转向纠偏控制律和差动刹车纠偏控制律,关键在于如何将3个纠偏子系统很好的综合起来,实现各个纠偏控制律高效的协调控制。
3.1 前轮纠偏控制
若飞机因某种原因偏离跑道中心线,不加以控制,一段时间后,侧偏距离增大,且与跑道中心线之间存在偏航角。纠偏控制不仅要消除侧偏距,还要消除航向偏差,因此引入侧偏距和航向偏差作为反馈控制信号,同时为了减小超调和震荡,引入侧偏距微分信号和偏航角速率信号来增加系统阻尼。
采用比例加微分结构,前轮纠偏控制律为:

(26)

3.2 方向舵纠偏控制
在高速时,气动舵效高,方向舵的作用效果较为明显;在低速时,气动舵效变低,靠方向舵很难快速调整飞机的航向。同样地,方向舵纠偏以侧偏距信号、偏航角信号以及它们的一阶微分信号作为反馈信号,通过控制律解算生成方向舵偏转指令,控制律为:

(27)
3.3 主轮差动刹车控制律
以侧偏距信号、偏航角信号以及它们的一阶微分信号作为输入,经刹车控制律解算,生成刹车纠偏控制指令,然后根据指令的正负,经刹车分配器对左主轮或者右主轮刹车机构送入指令,这样将对一侧主轮施加刹车压力,产生刹车力矩,增大地面的摩擦力,而另一侧主轮不受刹车压力,仅受滚动摩擦力作用。左右主轮受到的摩擦力不同,就可以通过左右主轮的摩擦力差异产生偏航力矩控制飞机左右偏转。主轮差动刹车的控制结构如图6所示。
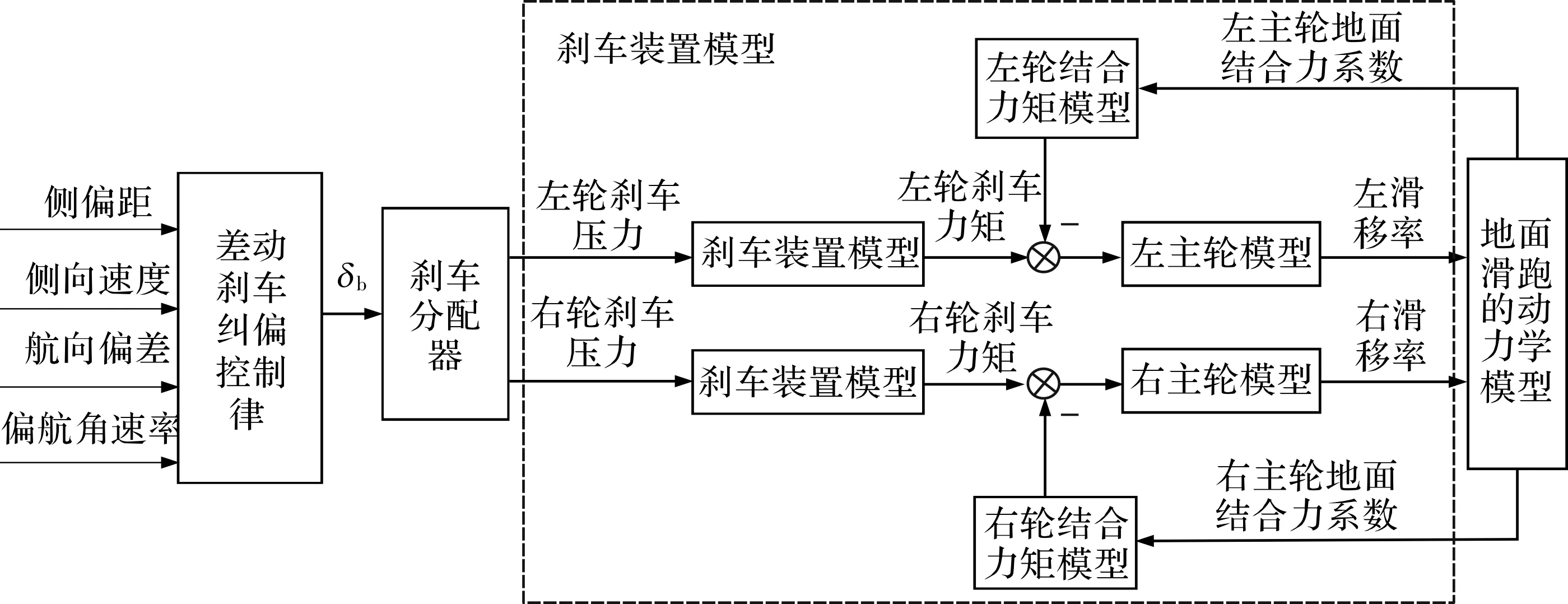
图6 刹车纠偏控制结构
差动刹车纠偏控制律为:

(28)
刹车分配器分别为:

(29)
(30)

3.4 综合纠偏控制方案
对于3种纠偏方式,在低速时,主轮刹车和前轮转向的纠偏效果较好,在高速时,方向舵纠偏效率较高。引入影响因子,采用在低速的时候主要通过前轮转向和差动刹车进行纠偏控制,淡化方向舵的影响因子,此时方向舵作用较小,起辅助纠偏作用;在高速的时候主要采用方向舵纠偏控制,淡化主轮转向和差动刹车的影响因子,这时主轮转向和差动刹车作用较小,起辅助纠偏作用。影响因子为:

(31)
式中:是方向舵影响因子;是飞机速度;是飞机的接地速度。由此可以看出,当飞机刚接地时,速度最大,此时方向舵影响因子为1,前轮和差动刹车的影响因子为0,只通过方向舵纠偏,而随着速度减小,方向舵权限逐渐降低,前轮和差动刹车权限逐渐升高。
此时的综合纠偏控制结构如图7所示。

图7 综合纠偏控制结构
综合纠偏控制最后的纠偏控制输出为:
=[(1-)(1-)]
(32)
4 仿真结果与分析
为验证滑跑模型的正确性及综合纠偏控制的有效性,以某运输机为对象,按上述建模方法建立地面滑跑模型,在3种方式单独纠偏控制的基础上,进行综合纠偏控制仿真。
4.1 滑跑模型正确性仿真验证
条件设置:飞机接地速度为80 m/s,初始航向与跑道中心线对齐,接地俯仰角和迎角为5°,飞机接地后摩擦系数取0.6,发动机模式为反推模式,仿真结果如图8~图11所示。
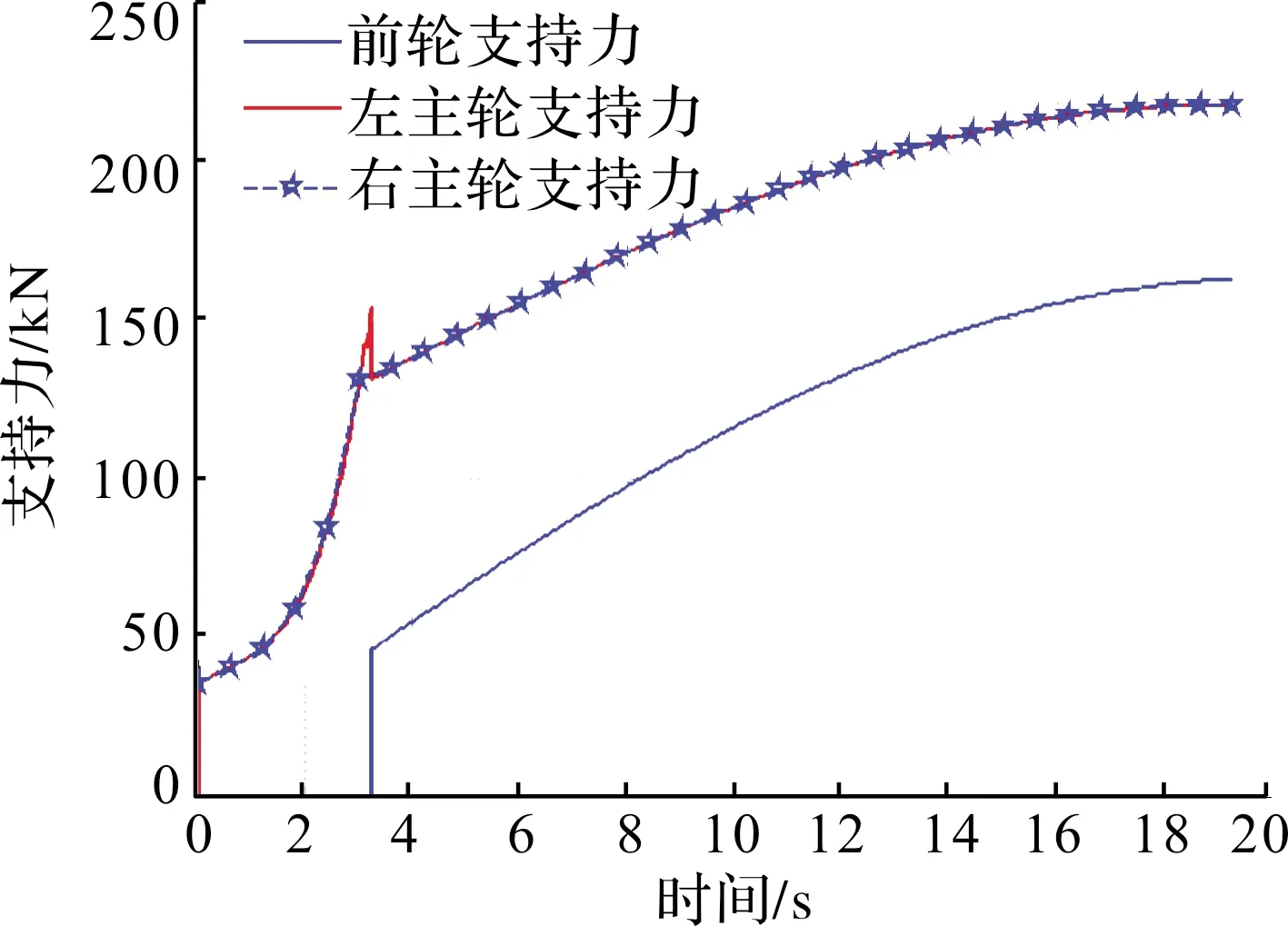
图8 飞机三轮支持力变化曲线
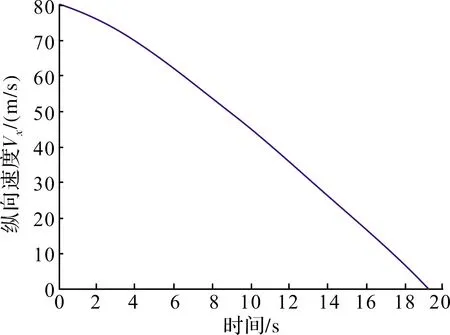
图9 飞机纵向速度变化曲线
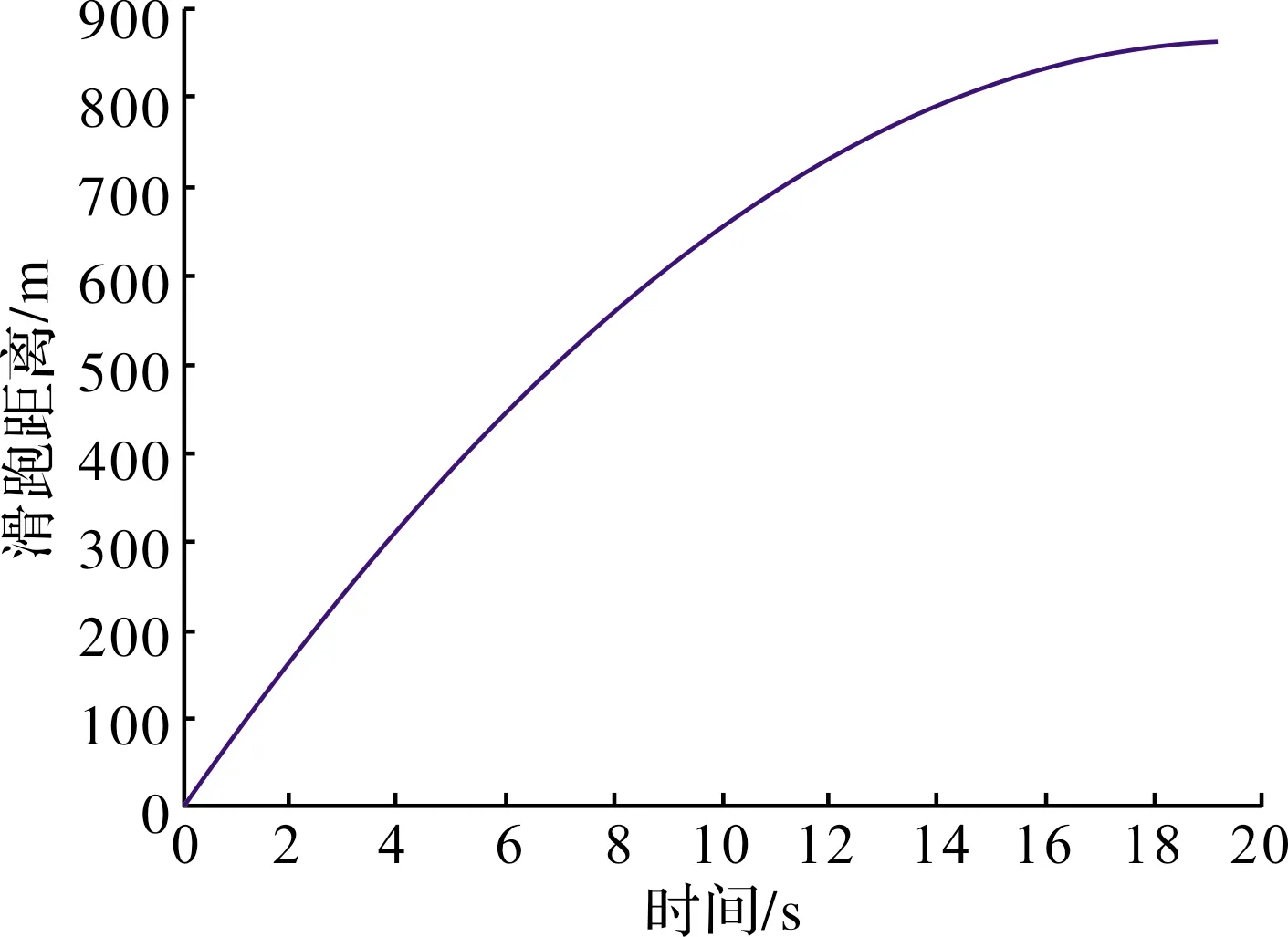
图10 飞机滑跑距离变化曲线
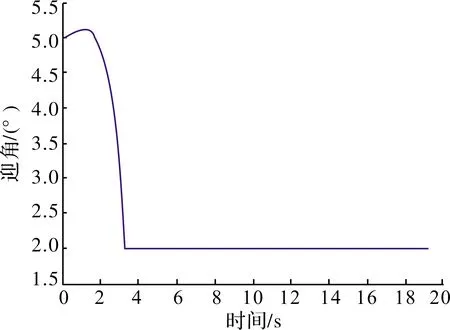
图11 迎角变化曲线
从仿真结果来看,飞机以80 m/s的速度接地,经过约19 s时间飞机速度减到0,滑跑距离约870 m。在开始接地时,左右主轮接地,前轮不接地,此时前轮支持力为0,主轮接地瞬间支持力突变达到一定值,然后随着飞机速度减小,升力减小,主轮支持力逐渐增大,于此同时,飞机迎角和俯仰角逐渐减小,飞机机头下压,约3.2 s飞机前轮触地,前轮支持力突然增大,主轮支持力瞬间减小,此后,三轮支持力成逐渐增大趋势。在整个过程中,纵向上受力始终近似处于平衡状态,在飞机停止后,飞机受到的支持力等于重力,飞机迎角等于停机角2°。仿真结果符合飞机接地滑跑过程,说明建模正确。
4.2 单独纠偏与综合纠偏效果对比验证
条件设置:飞机的着陆初始位置偏离跑道中心线右边10 m处,飞机的初始方向与跑道方向一致,飞机的着陆速度为80 m/s,初始侧向速度为0 m/s。仿真结果如图12~图18所示。
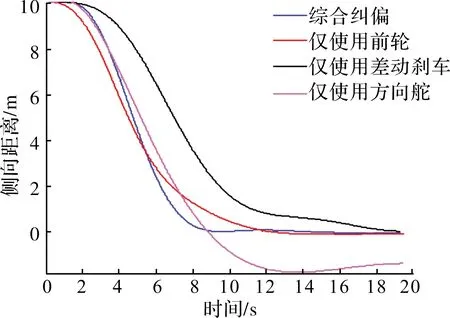
图12 侧偏距变化曲线
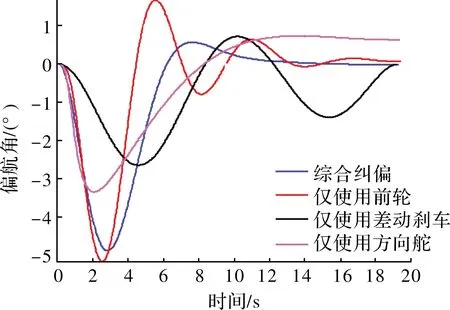
图13 偏航角变化曲线
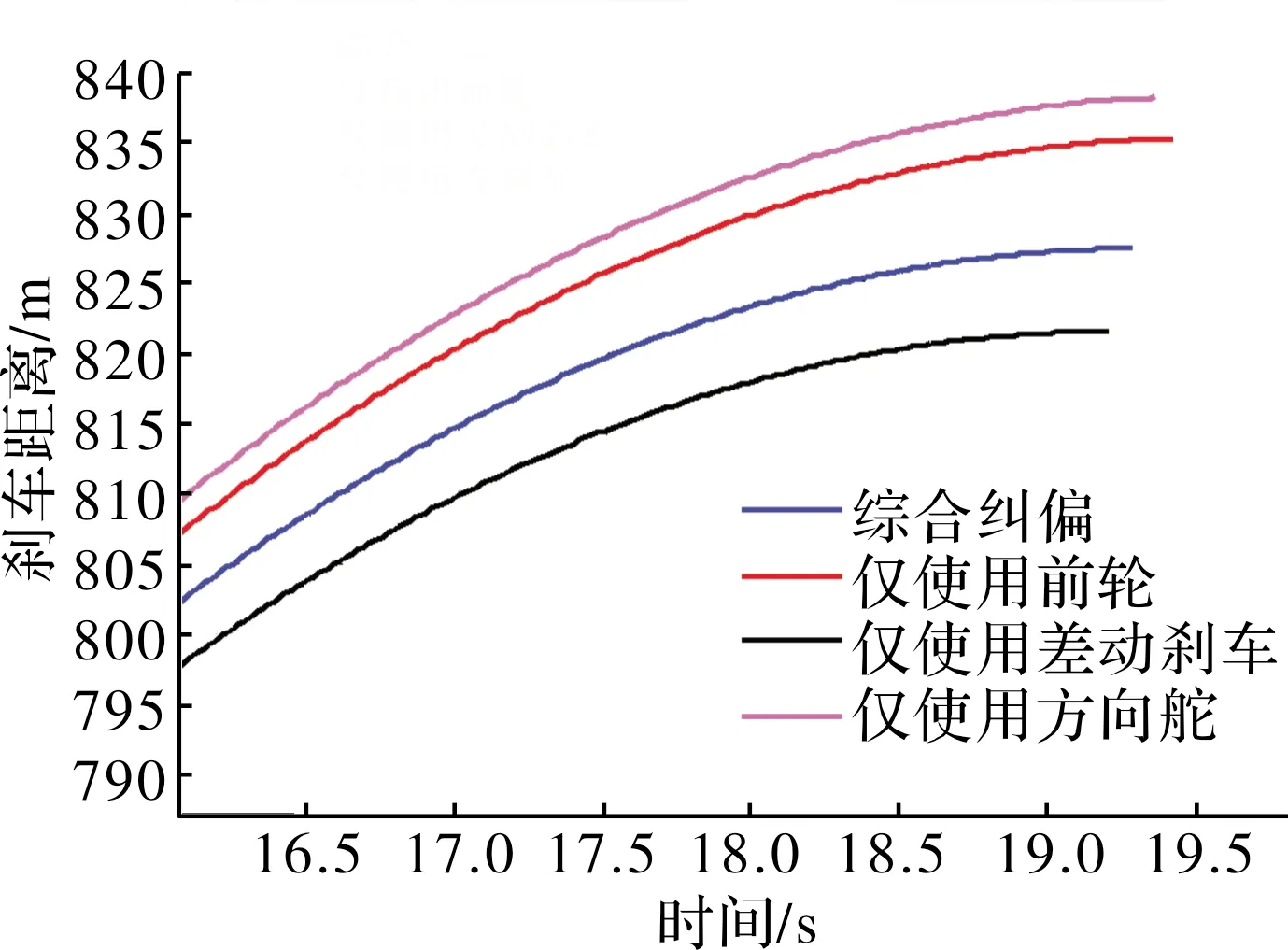
图14 滑跑距离变化曲线
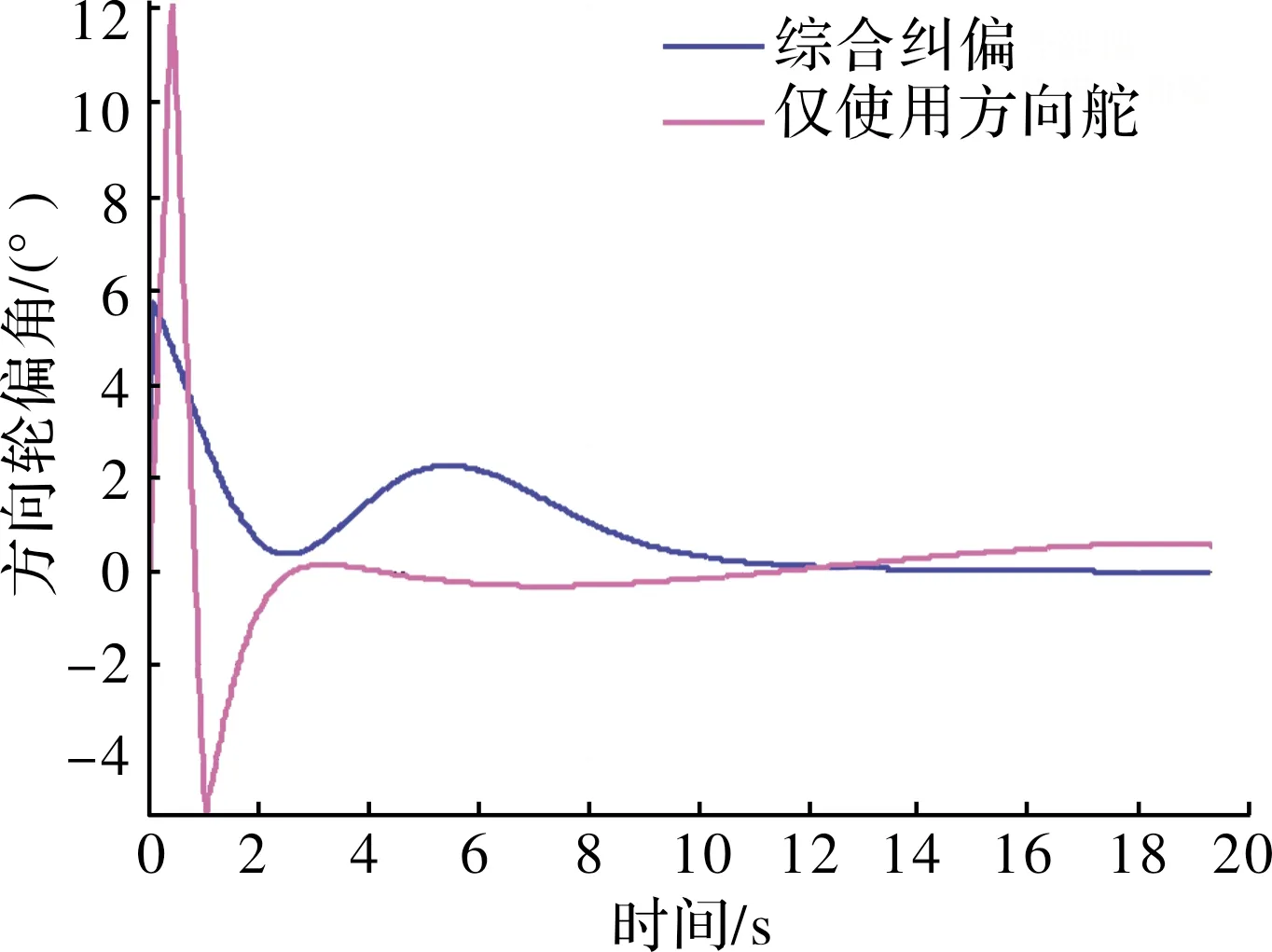
图15 方向舵变化曲线
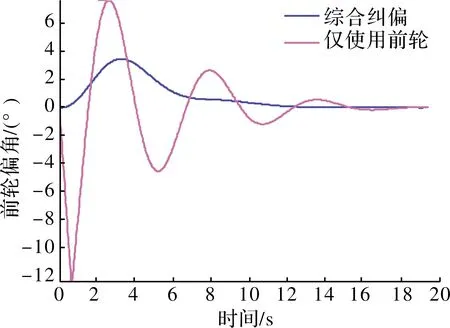
图16 前轮偏角变化曲线
由仿真曲线可以看出,地面综合控制的效果比单个纠偏控制的要好。在侧偏距调节中,综合控制下的侧偏距能快速无超调的控制到0,调节时间约为8 s;通过偏航角曲线看出,综合控制下的偏航角峰值虽然不是最小,但达到稳态的时间是最短的,而且整个过程中偏航角响应比较平滑,不像前轮和差动刹车一样震荡收敛。由不同控制输入曲线看出,综合控制作用下的输入远比单个纠偏控制下的输入小,并且变化缓慢稳定。在方向舵单独控制中,方向舵偏角最大为12°,而综合控制最大为6°;前轮单独控制中,前轮偏角最大为12.3°,在整个过程中,前轮左右快速偏转,而在综合控制中最大转角仅为3.5°,偏转平滑缓慢;综合控制下的主轮差动刹车压力也远比单独使用时小很多。由此可以得出,在综合控制下,不需要很大的输入就能实现很好的纠偏控制,其效益远比单个控制要好。根据输入曲线可以看出,前轮和差动刹车在高速时起到抑制方向舵纠偏的效果,这是由于高速时方向舵舵效较高,纠偏过快有使飞机侧偏超调的趋势,而前轮和差动刹车施加反向作用力起阻尼作用,到了低速阶段,飞机侧偏较小,前轮和差动刹车起主要作用,用于调整航向,对准跑道中心线。
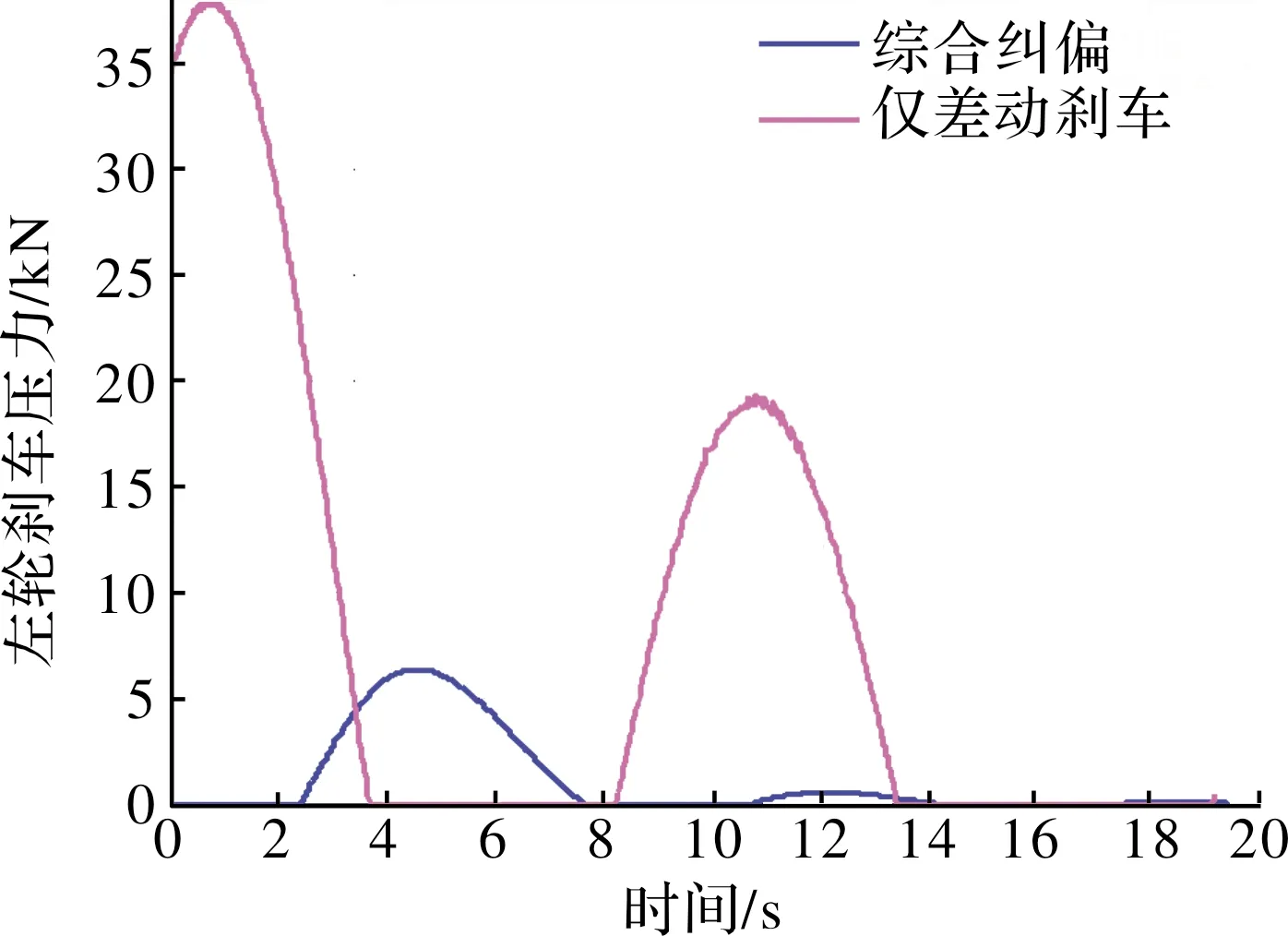
图17 左轮刹车力变化曲线

图18 右轮刹车力变化曲线
5 结论
在对飞机地面运动受力分析的基础上搭建两轮和三轮滑跑的非线性模型,从着陆滑跑运动仿真结果来看,支持力、速度、滑跑距离、迎角变化符合飞机着陆滑跑特点,从而说明模型的正确性。分别设计前轮、方向舵、差动刹车的控制律,然后根据各个子系统在不同速度段的控制效率,引入影响因子将三者进行综合控制,仿真结果表明,综合纠偏控制只需要较小的控制输入,便能快速的进行侧向纠偏,控制效果比单个纠偏控制要好。
猜你喜欢
装备环境工程(2022年7期)2022-08-10 10:22:50
装备制造技术(2021年4期)2021-08-05 07:39:40
民用飞机设计与研究(2021年1期)2021-04-06 13:09:54
机械设计与制造工程(2020年8期)2020-09-03 08:15:54
北京航空航天大学学报(2017年9期)2017-12-18 07:12:28
电子制作(2017年10期)2017-04-18 07:23:16
电子制作(2017年23期)2017-02-02 07:17:24
红蜻蜓·低年级(2015年11期)2016-02-02 11:04:45
电测与仪表(2015年24期)2015-04-09 12:04:48
农机使用与维修(2014年11期)2014-11-18 01:32:07